微振动传感器校准技术研究
2015-10-31刘振风付茂岳刘敬敏
刘振风,付茂岳,刘敬敏
(北京东方计量测试研究所,北京 100094)
微振动传感器校准技术研究
刘振风,付茂岳,刘敬敏
(北京东方计量测试研究所,北京 100094)
文章介绍了微振动对航天器的影响,并基于对微振动计量工作的现实需求,根据现有振动计量技术和设备状态,提出了基于虚拟仪器技术的微振动校准技术研究方案,通过适当量级的振动控制和谐波失真抑制,实现对0.05~400 Hz范围内的微振动传感器的校准,提升航天计量保障能力。
微振动;振动量级;谐波失真;比较法校准
0 引言
航天器在轨运行过程中,各种剩余外力的影响所形成的微振动环境使得航天器并非处于自由漂移状态。通过了解航天器运行时的微振动环境,可以监测航天器运动部件及控制系统的工作状况,掌握航天器的结构动力学响应特性,分析可能造成失效的潜在因素,以积累经验,提高设计和制造水平,保证航天器的可靠性和安全性。
1990年发射的“哈勃”太空望远镜入轨后无法正常工作,后经研究发现,是由于“哈勃”进出地影时冷热交变诱发太阳电池阵微振动,导致望远镜指向精度发生变化[1]。这些振动频率响应范围包括DC~10 Hz的低频颤振和10~500 Hz的高频颤振。NASA戈达德航天中心和兰利研究中心对地球观测系统“上午星”(EOS AM—1)作了微振动及稳定性的分析计算,发现反作用轮、低温制冷器等产生的扰动对卫星的指向精度和姿态稳定度造成明显的影响[2-3]。国内也有人开展了卫星在轨动力学环境的测量,测量结果显示其微振动量级为0.01~1 m/s2,频率范围为0.1~150 Hz。
微振动传感器工作频率一般比较低,加速度幅值远小于中高频振动。而型号任务中有许多微振动传感器需要进行频率低至0.1 Hz、幅值小于0.01 m/s2的振动校准,对校准系统提出了更高的要求。北京东方计量测试研究所现有的校准系统由美国恩德福克公司于20世纪90年代设计制造,最大振动幅值(峰值)为158mm、最大承载能力为5 kg、最低频率仅为1 Hz,已不能满足型号任务中微振动传感器计量对低频、低幅值的要求,需要进行技术升级。本文为此展开相关研究。
1 校准原理
1.1基本原理
校准系统采用正弦比较法[4]对微振动传感器进行校准,其校准原理如图1所示。

图1 比较法传感器校准原理Fig.1 Principal of comparison calibration
控制系统设置所需要的校准频率和幅值,由信号发生模块产生的标准正弦信号经过功率放大器后驱动振动台实现往复运动;标准传感器感受到运动激励的输出经过放大器放大后被信号采集模块所采集,经过数据处理后反馈给控制系统;控制系统针对反馈确定是否需要调整量级以及进行谐波失真控制,并测量标准传感器及被校传感器的输出电压,计算出被校振动传感器的灵敏度。
设被校传感器灵敏度为Sx,其输出Ex经阻抗变换和放大后为E′x=KxEx(Kx为放大系数),并由数据采集处理系统测出;标准传感器灵敏度 S0为已知,其输出E0经变换放大后为E′0=K0E0(K0为放大系数),也由数据采集处理系统测出。则

1.2振动量级的控制
振动量级是根据标准传感器测出的实际加速度值进行反馈控制的。目前普遍采用的是步进式控制方式[5-6],即在达到目标幅值之前加速度值呈阶梯形式增加。这种方式需要的调整时间过长,不利于微振动传感器在低频时的校准。为此,本文提出了一种新的指数式振动量级控制方法来增加加速度幅值:通过检测当前信号幅值Ad,并根据设定目标值A0(该值通过系统常数所需要量级进行估算),给定某一合适的时间常数a,使控制信号按照

进行变化。其中f为信号的频率。当t/a>5时,当前信号 Ad≈0.993A0,可以认为信号已经达到设定目标值。此时判断设定目标值是否达到所需要的量级,如未达到则更新设定目标值,重复前面的过程,直至达到所需量级,控制信号达到稳定。调整信号频率时,程序首先设定目标值为0,使当前幅值衰减到较小幅度后重新起振。适当调整时间常数a,就可以使输出信号的幅值满足要求,从而实现加速度幅值的反馈控制。
利用这种方式进行调整,不仅可以节省大量的调整时间,还能减小调整过程中振动台台体和传感器受到的冲击,保护设备的安全。
1.3谐波失真的抑制
谐波失真抑制是低频振动校准的重点和难点。为了降低谐波失真提高校准的不确定度,韩冬等提出了通过有限元分析的数值方法来保证振动台与激光测振仪拥有良好的隔振基础[7];Ohm等设计了一种通过在期望频率共振的悬臂梁产生低失真度低频振动的校准装置[8];浙江大学的何闻等通过非线性动态特性分析提出基于位移反馈的振动控制使得位移失真度<0.3%[9];胡春艳等采用谐波陷波的反馈方式进行谐波失真的控制,对幅值较大的2个谐波成分进行反馈,实现了谐波的补偿与抑制[10]。
本文参考随机振动试验的控制方法以及谐波陷波法的原理,提出了基于频率响应函数的谐波陷波法实现谐波失真抑制,如图2所示。在测定了校准系统的频率响应函数的情况下,对标准加速度传感器的输出信号进行傅里叶变换得到基波和谐波成分,选择谐波中的特定成分进行反馈补偿,从而达到抑制谐波失真的目的。其中校准系统的频率响应函数通过半正弦波冲击法来测定。这样做的好处是可以避免谐波陷波法中谐波成分相移测量不准带来的偏差;减少计算的谐波成分,有利于减少运算量,提高系统的运行速度和稳定性。

图2 基于频率响应函数的谐波陷波法Fig.2 Harmonic notch based on frequency response function(FRF)
2 实施方案
2.1传感器
传感器的硬件设计主要包括加速度计以及其供电、滤波放大电路。加速度计用于感受振动台的振动激励,并产生相应的电信号。由于振动频率较低,传感器输出的信号较小,为了获取更好的信噪比和分辨率,传感器的输出信号一般需要经过低噪声放大和滤波处理。
经过研究,选用高灵敏度的加速度计。该加速度计是氮气阻尼的容性微型机械装置,封装于经过稳定处理的阳极氧化铝壳中。其测量频率范围为0~400 Hz、加速度范围为±2 g,工作温度范围为-55~125 ℃。采用图3所示的低噪声运算放大电路进行信号滤波放大,经放大后的加速度灵敏度幅值可达20 V/(m/s2)。传感器和运算放大器本身工作在直流状态下,且具有零点漂移和温度漂移的特性,为此设置了输出零点调整功能。

图3 传感器的滤波放大电路Fig.3 Circuit of filtering and amplifying of the sensor
2.2控制与采集处理
控制与采集处理系统采用虚拟仪器技术,利用高性能的模块化硬件,结合高效灵活的软件来完成各种测试、测量和自动化的应用,具有性能高、扩展性强、开发时间少等优势。本设计的控制与采集处理系统以PXI4461为基础、以图形化的LabVIEW为编程语言、以PXI1031为集成平台进行设计实施。
PXI4461是专为声学和振动分析而设计的高精度数据采集设备,可对加速度传感器和其他一些具有大动态范围的传感器进行精确测量,具有振动监测与分析的全部功能。它具有两通道同步模拟输出和两通道同步模拟输入,分辨率均为24位,最大更新速率可达204.8 kHz,支持差分/伪差分输入和直流/交流耦合,动态范围达到 118 dB,符合本研究对信号发生和采集的硬件需求。
考虑到校准的要求以及使用的便利性,控制与采集处理系统的软件结构层次如图4所示,并利用LabVIEW来实现。
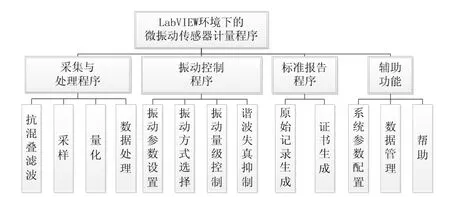
图4 软件的结构层次Fig.4 Structure of the software
振动控制程序具有校准参数设置、校准方式选择等功能,并可根据采集与处理的结果对输出信号进行控制,从而达到控制振动量级以及抑制谐波失真的目的。为了实现振动控制,首先需给出校准系统的频率响应函数。
利用PXI4461的高速高精度采集特性,实现对两通道输入信号同步采集,并对采集到的信号进行抗混叠滤波、量化等处理,再将处理结果反馈给振动控制程序。采集程序采集的0.1 Hz下传感器的加速度输出波形见图5,该波形已经过谐波失真抑制。

图5 采集程序采集到的波形(0.1 Hz)Fig.5 Waveform acquired by the program (0.1 Hz)
3 测试结果
将由高灵敏度的加速度计及滤波放大电路组成的传感器套组作为标准传感器,首先在谐波失真抑制方面进行测试。图6中完整的正弦曲线(黑色曲线)是信号源的驱动波形,红色曲线为谐波失真抑制前传感器的输出波形,波形虽仍具有周期性但已完全不是正弦波形(存在严重的失真)。相比之下,经过谐波失真抑制后的波形比较完好、失真度较小,谐波抑制达到了预期的目的(参见图5)。
在谐波失真抑制的条件下,对振动量级的控制准确度以及谐波失真度进行测量,得到表1的结果。从表中可以看出,振动量级控制水平满足校准要求,在 0.1~200 Hz的情况下,谐波失真度均小于2%,达到预期控制目的。0.05 Hz时谐波失真度也仅为3.5%,也满足校准条件。

图6 0.1 Hz下未经谐波抑制的加速度计输出波形Fig.6 Waveform output of accelerator at 0.1 Hz without HDR restraint

表1 振动量级控制测试结果Table 1 Test results of vibration level control
4 结束语
本文从实际测量需求出发,提出了超低频振动传感器的比较法校准研究,并基于虚拟仪器技术对校准系统进行了实现,取得了一些成果:1)通过对振动台量级控制的研究分析,提出了指数逼近法的振动量级控制方案,测试结果表明控制方案达到了预期效果;2)基于对随机振动试验控制方法和谐波陷波法原理的研究,提出了基于频率响应函数的谐波陷波法进行谐波失真抑制,测试结果证明抑制效果比较明显。
本研究在现有振动台系统基础上进行,有效提升了校准装置的校准范围和校准能力,提高了型号任务的计量保障能力,助力我国航天事业的健康发展。
(
)
[1]Wie B, Liu Qiang, Bauer F.Classical and robust H∞control redesign for the Hubble space telescope[C]//AIAA Guidance, Navigation and Conference, l992-08
[2]Neeck S P, Venator T J, Bolek J T.Jitter and stability calculation for the ASTER instrument[C]//Satellite Remote Sensing.International Society for Optics and Photonics, 1995: 70-81
[3]Ram M, Throckmorton A.EOS instrument jitter assessment and mitigation[C]//Aerospace Design Conference.AIAA,1993
[4]赵煜, 周东强.“海洋二号”卫星主动段、自由飞行段力学环境测量与分析[J].航天器环境工程, 2012, 29(4):458-463 Zhao Yu, Zhou Dongqiang.In-situ measurement and analysis of mechanical environment on HY-2 satellite[J].Spacecraft Environment Engineering, 2012, 29(4): 458-463
[5]国防科工委科技与质量司.力学计量(下)[M].北京:原子能出版社, 2002: 646-647
[6]王光庆, 何闻, 贾叔仕.振动校准自动控制系统中软件设计的研究[J].机电工程, 2001, 18(5): 193-195 Wang Guangqing, He Wen, Jia Shushi.The design of control software in vibration calibrate system[J].Mechanical & Electrical Engineering Magazine, 2001,18(5): 193-195
[7]韩冬, 何闻.超低频标准振动系统基础设计技术[J].振动与冲击, 2008, 27(9): 20-22 Han Dong, He Wen.Design of foundation for standard vibration systems with ultra-low-frequency[J].Journal of Vibration and Shock, 2008, 27(9): 20-22
[8]Ohm W S, Wu L, Hanes P, et al.Generation of low-frequency vibration using a cantilever beam for calibration of accelerometers[J].Journal of Sound & Vibration, 2006, 289(1):192-209
[9] He W, Zhu C, Ma F.Realization of low-distortion ultra-low-frequency vibration based on feedback control technology[C]//Networking, Sensing and Control, 2005.Proceedings.2005 IEEE, 2005: 795-798
[10]胡春艳, 李新良.谐波陷波法超低频标准振动台失真度控制[J].计测技术, 2010(4): 3-4 Hu Chunyan, Li Xinliang.Distortion control of super low frequency standard shaker using harmonic notch method[J].Metrology & Measurement Technology,2010(4): 3-4
(编辑:王 洋)
The calibration of micro-vibration sensor
Liu Zhenfeng, Fu Maoyue, Liu Jingmin
(Beijing Oriental Institute of Measurement and Test, Beijing 100094, China)
This paper first briefly discusses the effect of the micro-vibration on spacecraft.Based on the practical demands for the calibration of micro-vibration and the present status of techniques and equipments of the vibration calibration, we come up with a micro-vibration calibration solution.By a proper vibration level control and the harmonic distortion restraint-notch(HDR), we make the calibration from 0.05 Hz to 400 Hz, which has enhanced our ability to calibrate and complete the launch tasks, and guarantees the sustainable development of our aerospace career.
micro-vibration; vibration level; harmonic distortion; comparison calibration
V476.3
B
1673-1379(2015)06-0652-04
10.3969/j.issn.1673-1379.2015.06.017
刘振风(1988—),男,硕士研究生,研究方向为仪器科学与技术、振动冲击计量;E-mail: lzfbrick6911@163.com。指导教师:付茂岳(1957—),男,硕士学位,北京东方计量测试研究所副总工程师,主要从事振动冲击方向计量与测试工作。
2015-03-27;
2015-11-22
