基于机械泵控制的毛细分离式喷雾冷却回路热控系统仿真分析
2015-10-31巩萌萌李运泽
王 瑾,巩萌萌,李运泽,王 浚
(1.北京宇航系统工程研究所,北京 100076;2.中国运载火箭技术研究院 研究发展中心,北京 100076;3.北京航空航天大学 航空科学与工程学院,北京 100191)
基于机械泵控制的毛细分离式喷雾冷却回路热控系统仿真分析
王 瑾1,巩萌萌2,李运泽3,王 浚3
(1.北京宇航系统工程研究所,北京 100076;2.中国运载火箭技术研究院 研究发展中心,北京 100076;3.北京航空航天大学 航空科学与工程学院,北京 100191)
文章分析用于空间环境下的毛细分离式喷雾冷却回路热控系统原理,通过节点网络法建立该热控系统4节点热网络模型;运用数值仿真方法,以机械泵为控制对象,对该系统分别采用PID控制和模糊增量控制方案的热控效果进行对比。结果表明,模糊增量控制与PID控制相比,超调量较小且达到稳态时间短,具有良好的控制鲁棒性。
喷雾冷却回路;热控系统;模糊增量;机械泵;节点网络法
0 引言
空间电子设备正朝着微型化和高度集成化的方向快速发展,使得航天器电子设备的热流密度及散热量急剧攀升[1-3]。喷雾冷却作为一种高效热控技术,以其覆盖面积大、冷却液体流量小、换热均匀等优势,在空间高功率电子设备散热领域具有广泛的应用前景,并已经在冶金、机械加工、能源、医学、化工等领域得到应用[4]。
国内外专家学者对喷雾冷却系统在地面环境下的换热机理、影响因素以及临界热流密度(CHF)等方面进行了大量的研究发现:在地面环境下喷雾冷却系统可实现高效换热,以水为工质时的热流密度可高达 1000 W/cm2。对地面应用系统通过搭载飞行进行微重力试验的结果显示:在微重力环境下,浮力以及重力作用减弱,使喷雾壁面液膜变厚以及气泡分离速度降低,导致喷雾冷却系统的换热效率降低[5-10]。毛细多孔芯由固体骨架和孔隙组成,是一种由各种微观结构的固体颗粒连通组成的多孔结构,具有毛细多孔芯渗透作用、液体浸润作用以及比表面大等特点,能够适用于空间各种变重力环境,如微重力环境、月球以及火星重力环境等[11-13]。2006年美国 NASA Glenn 研究中心的Hasan等提出了将毛细多孔芯应用于空间站的空气除湿器中,利用其气液分离作用实现空气的除湿,并借助其毛细作用实现液体的传输[12-13]。Silk等通过试验证明:以多孔结构作为喷雾壁面时,喷雾冷却系统的CHF高达140 W/cm2,相比于平板结构高出75%左右[6,10]。
针对应用于复杂空间环境及不同工作模式下的航天器的高热流密度散热问题,本文对毛细分离式喷雾冷却回路(CSSCL)热控系统原理进行分析,基于节点网络法建立该热控系统包括封装加热面、喷雾装置、毛细多孔芯换热器以及空间辐射器的4节点热网络模型和温度动态数学模型;并设计以机械泵为控制对象的PID控制和模糊增量控制方案;最后面向实际应用,运用数值仿真方法对该热控系统的主动控制策略之控制效果进行验证对比分析。
1 系统动态特性建模
1.1热控系统原理
毛细分离式喷雾冷却回路热控系统如图1所示,由热量收集、热量传递和热量排散3部分组成。
热量收集由雾化喷嘴和毛细多孔芯组成的喷雾装置完成,封装加热面与毛细多孔芯紧密贴附。
热量传递环节主要包括节流阀、机械泵和流体管路等,负责将热量带到热量排散环节。节流阀和机械泵等组件均位于液体总管路上,是系统中的可控执行部件,能够实现回路系统的工质流量调节;流体管路分为蒸汽管路、液体管路和液体总管路等,其中液体管路是多孔毛细管,内部填充有毛细多孔芯。
热量排散由多孔换热器和空间辐射器组成的储液装置完成,空间辐射器贴附于多孔换热器外表面,多孔换热器内部填充毛细多孔芯。

图1 毛细分离式喷雾冷却回路热控系统Fig.1 The thermal control system using capillary separate spray cooling loop
该热控系统的工作原理如下:系统工作时液体工质通过机械泵加压后送入喷雾装置内部的雾化喷嘴,雾化成微细液滴冲击毛细多孔芯表面;喷射到表面的微细液滴在多孔芯的毛细作用下被捕捉并附着在多孔芯表面形成一层液膜,一部分蒸发为蒸汽,并由于毛细多孔芯的亲水憎汽机理而停留在喷雾腔内;一部分未蒸发的液体工质在毛细作用和正压力作用下,进入毛细多孔芯内部,并形成特殊的液体通道。蒸汽在喷雾腔内蒸汽相变驱动热的作用下经过蒸汽管路进入多孔换热器,液体工质经过液体管路进入多孔换热器。两部分工质在多孔换热器内混合换热放出热量,最终热量通过空间辐射器的外表面辐射排散到空间环境中,而冷却液体则在机械泵的作用下进入液体总管路,重新进入喷雾装置,实现整个循环。
1.2热控系统动态仿真建模
1.2.1建模假设
采用节点网络法[14-15]对毛细分离式喷雾冷却回路热控系统进行建模,选取封装加热面、喷雾装置、多孔换热器和空间辐射器作为热网络节点,如图2所示。其中Che、Csp、Cph和Cra分别为封装加热面、喷雾装置、多孔换热器和空间辐射器的节点热容。为了简化问题,突出研究重点,做出如下假设:
1)毛细分离式喷雾冷却回路热控系统为一个系统,包括封装加热面以及空间辐射器,除空间辐射器与外部空间环境有热量交换外,忽略系统与外界的其他热交换;
2)喷雾腔内蒸汽混合充分,压力和温度均匀分布;
3)喷雾腔出口蒸汽、储液器出口液体均处于饱和状态;
4)喷雾腔和储液器内部毛细芯各向同性,内部流体不可压缩,且毛细芯内部的流体与其固体骨架满足局部热平衡假设;
5)雾化喷嘴的喷雾范围完全覆盖封装加热面。

图2 毛细分离式喷雾冷却回路热控系统热网络模型Fig.2 The network model of thermal control system using capillary separate spray cooling loop
1.2.2热控系统模型
根据能量守恒方程及热力学第一定律,以节点网络法对封装加热面集总单元进行建模,得出以封装加热面平均温度The为受控对象的动态特性热平衡方程为

式中:Qhe为封装加热面的热功率;Ahe为封装加热面的面积;Tsp为喷雾装置集总单元的平均温度;R´hp为封装加热面与喷雾装置之间的热阻,包括封装加热面导热热阻、毛细多孔芯导热热阻及喷雾对流换热热阻,它可以表示为

式(2)中:δhe和δsp,p分别为封装加热面以及毛细多孔芯的厚度;λhe和λsp,m分别为封装加热面以及毛细多孔芯的平均导热系数;hsp为喷雾冷却对流换热系数。
由于喷雾冷却两相流换热模型是一个非常复杂的换热过程,所以喷雾热流密度一般是通过实验数据进行拟合得到,本文采用 Mudarwar[7]选用的以 PF-5052为工质的标准向上喷嘴和选用水为工质的有倾角的喷嘴所获实验数据总结得出关于喷雾冷却换热热流密度的实验关联式,为

式中:q为喷雾冷却热流密度;V为喷雾体积流量;Tsp,i为喷雾装置进口流体温度;ρl和ρv分别为喷雾液体和蒸汽的密度;hfg为喷雾蒸汽汽化潜热;cpl、σl和µl分别为喷雾液体的定压比热容、表面张力和液体黏性系数;d32为沙特直径(SMD直径),可以表示为

式中:ΔP为喷雾压降;d0为喷嘴直径。
根据伯努利方程可知,喷雾流量与压降的关系为

式中:Cq为喷雾流量系数;m为喷雾质量流量,m=VAsp,其中Asp为喷嘴出口截面积。
喷雾冷却对流换热系数hsp为

式中 a为喷雾换热多孔壁面修正系数,参考 Silk等[10]通过多孔壁面以及平板表面的喷雾冷却实验所得出的结论,假设该修正系数为1.55。
考虑到喷雾装置温度均匀一致,且周围外壳与外界绝热,将喷雾装置外壳以及毛细多孔芯当作一个集总单元,则喷雾装置集总单元的动态特性方程为

式中:mv、ml和m分别为喷雾流体蒸汽、液体以及总流体质量流量,满足

hv、hl和h´l分别为喷雾流体蒸汽、液体以及总液体的焓值,可以表示为

其中:Tsp,sat为喷雾腔内饱和蒸汽温度;Tph,o为多孔换热器流体出口温度。
由于多孔换热器在初始阶段内部充满液体,且根据毛细多孔芯的多孔性能以及满足局部热平衡假设,将多孔换热器和其内部液体看作一个集总单元,则多孔换热器集总单元的动态特性方程为

式中:R´pa为多孔换热器集总单元与空间辐射器之间的热阻;Aph为多孔换热器与空间辐射器的接触面积;Tph为多孔换热器集总单元的温度。
空间辐射器为平板式结构,并且所选用空间辐射器的导热系数较大,假设其内部温度均匀一致,将空间辐射器看作一个集总单元,其温度变化的动态特性方程为

以低地球轨道航天器为例,其在空间中受到太阳直接辐射、地球反照和地球红外辐射等多种因素影响,因而航天器接受到的空间外热流可以表示为

式中:Qr,1、Qr,2和Qr,3分别为单位时间内投射到辐射器外表面的太阳辐射热量、地球反照热量和地球红外辐射热量。
而空间辐射器在接受空间外热流的同时,由于空间深冷低温环境,会向空间环境辐射散热,辐射散热量为

式中:Ara为辐射器的辐射面积;ε和σ分别为辐射器外表面的当量发射率和斯忒藩-玻耳兹曼常量。
综上可知,依据节点网络法所建立的热控系统是一个四阶非线性系统,可表示为

2 热控系统控制策略
热控系统作为航天器重要分系统之一,在航天器整个任务周期中,担负着为航天器内部所有机电设备、有效载荷等空间任务单元提供安全可靠的温度环境的重要任务。随着未来航天器可能面临的变轨、快速机动等复杂空间任务,航天器在入轨后可能受到复杂空间环境以及不同在轨工作模式等诸多不确定因素影响,这就要求航天器热控系统能够根据当前的工作要求自主调整[16-18]。下文提出基于机械泵控制的喷雾冷却回路热控系统控制方案,以封装加热面温度为受控对象,机械泵驱动电压为控制变量,分别通过PID和模糊增量控制实现封装加热面的主动精密控温。
2.1PID控制方案
毛细分离式喷雾冷却回路热控系统PID控制流程如图3所示。通过对比将实际温度测量值与设定值间的误差信号输入PID控制器中,由PID控制器输出新的控制信号,调节机械泵的驱动电压,控制喷雾装置的进口流量和压力,以实现封装加热面温度的调节,再将调节后的温度值与设定值进行对比,重复以上过程,直至消除误差。具体的计算控制律见式(17),选取采样周期为1 s,采取衰减曲线法实现参数整定。
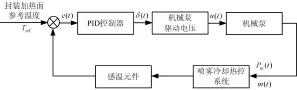
图3 毛细分离式喷雾冷却回路热控系统PID控制流程Fig.3 PID control strategy of the CSSCL thermal control system
PID控制器根据输入值Tref与实际测量值The构成的控制偏差为
由表1可知,药后15 d,1%甲基二磺隆·双氟磺草胺可分散油悬浮剂各剂量处理对雀麦的防效均在90%以上,并且随着施药量的增加而提高。单剂30 g/L甲基二磺隆可分散油悬浮剂对雀麦的防效为92.6%,对播娘蒿、荠菜的防效也高于80%;单剂50 g/L双氟磺草胺悬浮剂对播娘蒿、荠菜的防效均在90%以上,但由于对雀麦无效,所以总体防效较差。

机械泵驱动电压PID控制的控制律为
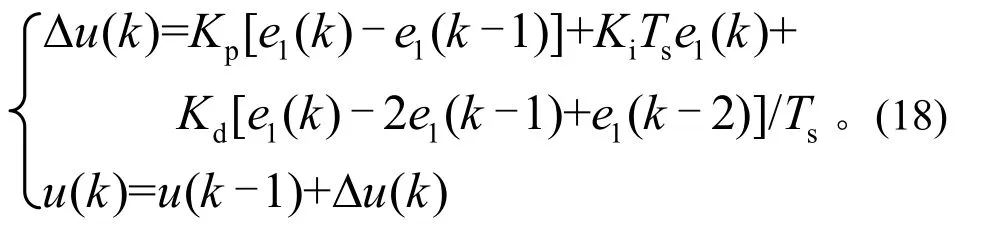
式中:Kp、Ki和Kd分别为PID控制器的比例系数、积分系数和微分系数;Ts为采样时间;k、k-1、k-2分别为当前时刻、前一个时刻、前两个时刻;u(k)为输出的控制变量。
2.2模糊增量控制方案
传统的以误差和误差变化量为输入的模糊控制器是一个PD型的模糊控制器,缺少积分环节,存在稳态控制残差。而模糊增量控制是一种改良的模糊控制模式:误差信号(给定值—反馈值)的一路经量化后直接输入模糊控制器;另一路求增量后再量化,而后输入模糊控制器,经过一系列的模糊化、模糊推理和解模糊,模糊控制单元输出控制变量的增量,然后通过延迟环节,将控制增量输出与上一时刻控制量输出相加,得到最终的控制变量。模糊增量控制不但可以消除控制残差,而且可以大幅提高控制算法的可靠性和鲁棒性。
毛细分离式喷雾冷却回路热控系统的模糊增量控制原理如图4所示。模糊增量控制策略的实质是根据温度实测值与控温目标给定值之间的误差,通过模糊增量控制算法调节机械泵驱动电压,间接调节喷雾流量和压力,将加热面温度控制在安全工作范围之内,从而抑制外热流及内部各种热功耗变化对系统温度稳定带来的不利影响。
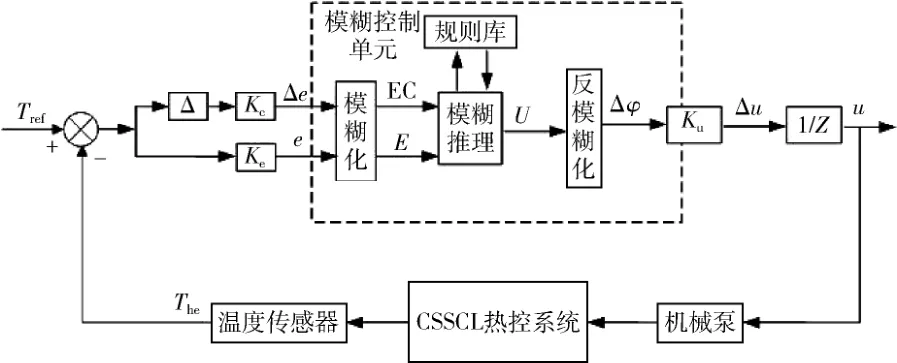
图4 热控系统模糊增量控制策略原理Fig.4 Fuzzy incremental control strategy of the CSSCL thermal control system
模糊增量控制器选用封装加热面温度The作为参考值,机械泵驱动电压u作为控制输出值。Kc、Ke和Ku为模糊增量控制器的控制参数(见表1)。e、Δe和u的论域均为{-6, -4, -2, 0, 2, 4, 6},分别对应语言值NB(负大)、NM(负中)、NS(负小)、ZO(零)、PS(正小)、PM(正中)和PB(正大)。e和 u的模糊子集的隶属函数选用高斯函数,Δe的模糊子集的隶属函数选取三角型函数,见图5。
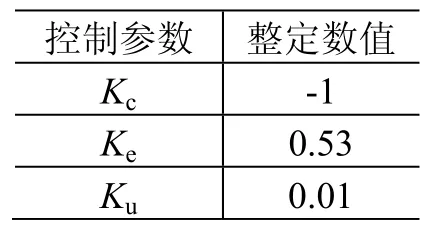
表1 模糊增量控制器参数Table 1 Parameters of the fuzzy incremental controller
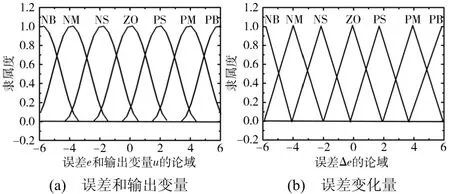
图5 模糊集的隶属函数Fig.5 Membership functions of the fuzzy sets
输入模糊化后,确定模糊集合的运算采用min计算模糊规则的激发强度,可以表示为

模糊规则由一系列“If-Then”型的模糊条件句构成,是由模糊语言变量E,EC和U 表示的一系列控制规则,全部规则见表2。模糊规则设计的基本原则是使得系统输出响应的动态特性和静态特性达到最佳,即在误差大或者较大时,控制输出以尽快消除偏差为主要目标;当偏差较小时,控制输出以防止超调和系统稳定为目标。模糊规则的观察输出曲面见图6。

表2 模糊控制规则Table 2 The rules of fuzzy incremental control

图6 模糊规则的观察输出曲面Fig.6 Surface map of the fuzzy incremental control rules
根据经验分析,对于毛细分离式喷雾冷却回路热控系统的模糊控制规则遵循以下原则:
1)当误差变化量较小时,若温度误差为正,则降低机械泵的驱动电压,即控制输出的增量为负;若温度误差为负,则提高机械泵的驱动电压,即控制输出的增量为正。
2)无论误差变化量为正还是为负,大的温度误差变化需要大的机械泵驱动电压输出,小的驱动电压输出适合于小的误差变化。
3)当误差增量为正时,误差变化量的增大将加强机械泵驱动电压输出减小的趋势;而当误差增量为负时,误差变化量的增大意味着有缓和机械泵驱动电压输出增大的趋势。
4)误差变化量的减小,在误差增量为正时有缓和机械泵驱动电压输出的趋势,在误差增量为负时有加强机械泵驱动电压输出增大的趋势。
采用Mamdani算法求得模糊控制的输出模糊子集,以重心法进行解模糊化,得到控制器输出为

式中:ur,j(i)是模糊输出值;µj(i)是模糊输出值的隶属度。
最后,将解模糊后输出的控制变量增量量化后与上一时刻的控制变量值 u(k-1)相加得到当前的控制变量u(k)

3 数值计算及仿真验证
3.1仿真对象参数设置
假设航天器内部仪器在初始工作状态下处于稳定状态,其中系统工质为去离子水,电子设备热功耗为 200 W,空间外热流为 100 W,空间辐射器MEMS百叶窗开度为0.9,机械泵驱动电压为4 V。初始状态下系统各个子模型温度节点信息参见表3。
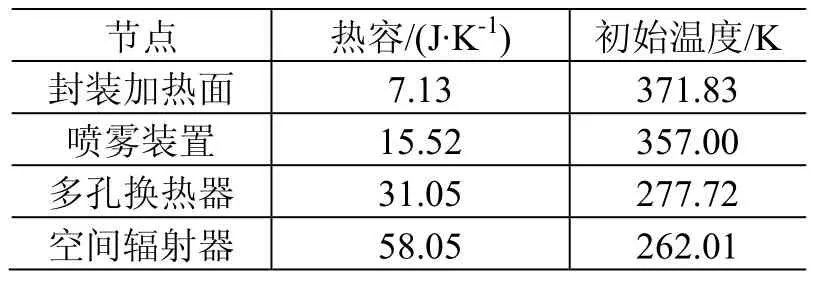
表3 子模型初始节点参数Table 3 The initial parameters of nodes for submodels
3.2电子设备热功耗发生+25%阶跃扰动
航天器上的电子设备所排散的热量会随任务变化而发生变化。为了满足飞行任务的需求或应对突发的状况,电子设备的发热功率往往会突然增加,即在某一时间点发生阶跃。
图7为电子设备热功耗发生+25%阶跃扰动时,毛细分离式喷雾冷却回路热控系统以机械泵驱动电压为控制对象时的 PID控制以及模糊增量控制策略下的系统参数动态响应图。从曲线可以看出,在开环状态下,电子设备初始热负荷为200 W,封装加热面温度在371.83 K达到平衡。在500 s时电子设备热负荷发生+25%阶跃扰动,由200 W上升至250 W,在模糊增量控制器作用下:封装加热面温度立即上升至374.25 K,而后有小幅度降低,最终在973 s时稳定至目标值371.83 K;喷雾装置温度首先发生小幅度上升,而后逐渐下降,在 946 s时达到稳定;多孔换热器以及空间辐射器的平均温度均平稳上升,并且分别在1031 s和1105 s时稳定在282.89 K和271.88 K。与PID控制相比,模糊增量控制下的封装加热面温度达到稳态的时间较短,并且超调量较小,趋稳时间和超调量分别为PID控制的62.7%和55.6%;多孔换热器以及空间辐射器的平均温度达到稳态的时间相对较短,分别为PID控制的 63.4%和63.7%,并且没有超调。PID控制以及模糊增量控制对比数据见表4和表5。
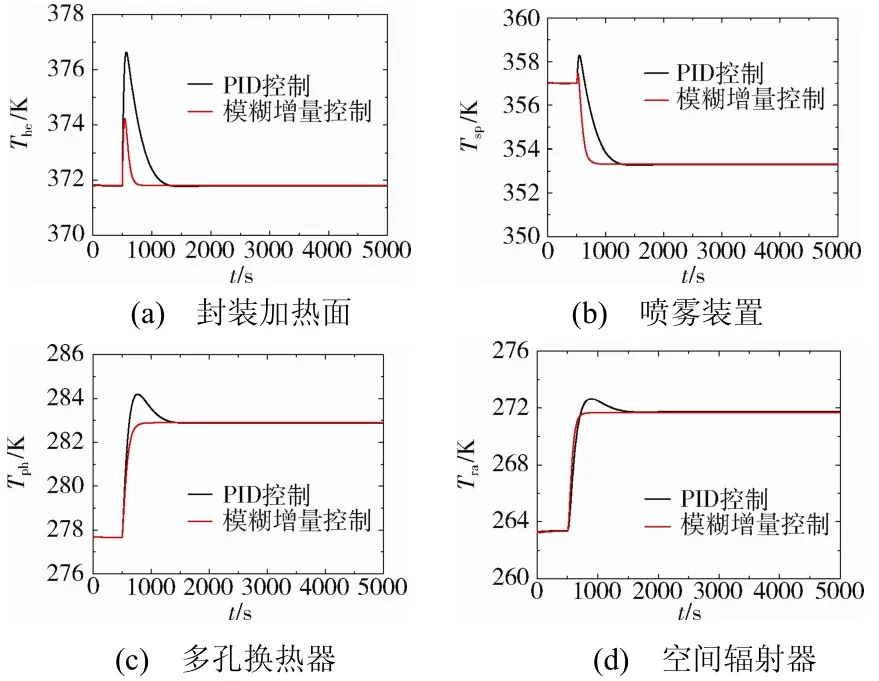
图7 电子设备热功耗发生+25%阶跃扰动时系统参数响应Fig.7 Response of system parameters to a +25% step disturbance of internal electronic power
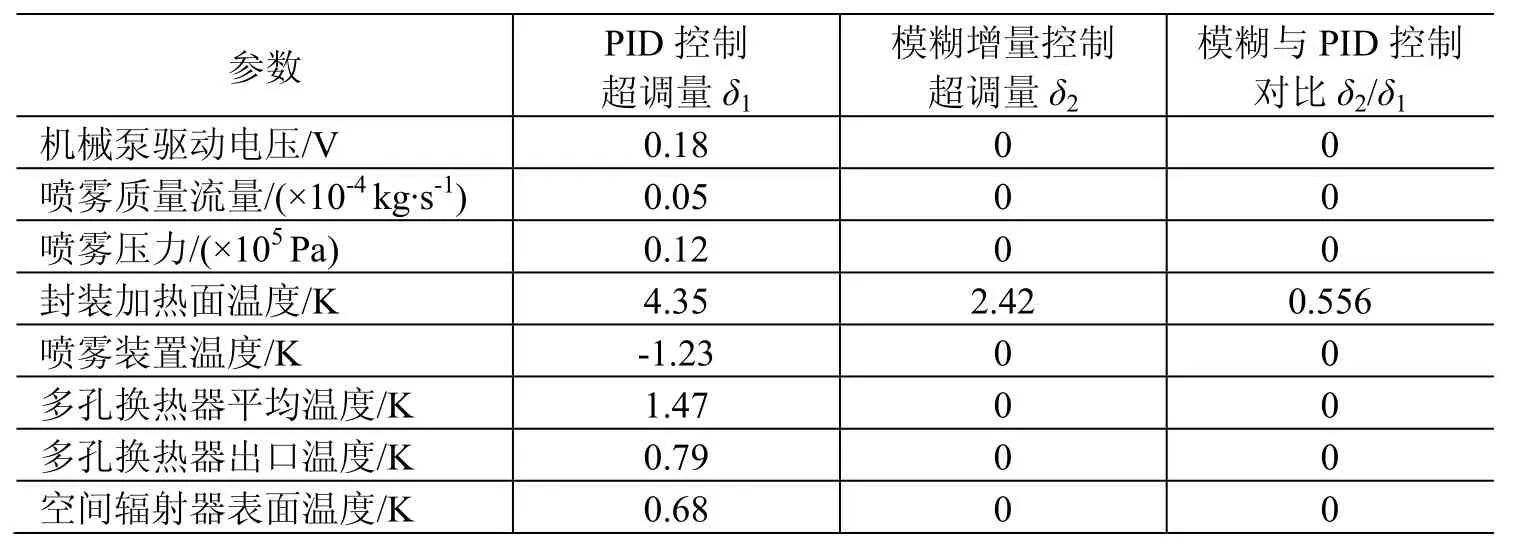
表4 PID控制及模糊增量控制下各节点参数超调量对比Table 4 Overshoot values of system parameters under PID and fuzzy control
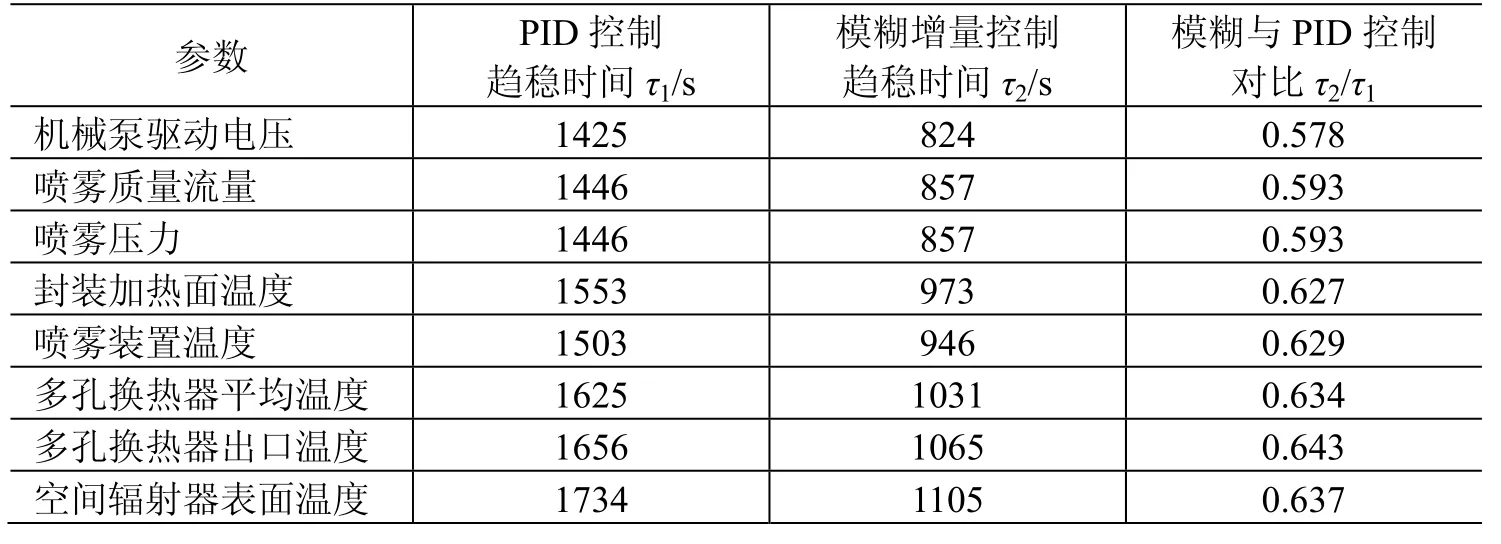
表5 PID控制及模糊增量控制下各节点参数趋稳时间Table 5 The stabilization time of system parameters under PID and fuzzy control
3.3加热面设定温度周期性阶跃扰动
在空间环境下,航天器将根据内部不同的工作特性选择不同的设定温度,需要判定热控系统的控制策略在设定温度变化下的控温效果。假设加热面设定温度发生周期性阶跃扰动,阶跃周期为500 s,外热流不发生变化,设定温度(Tref)变化的趋势如图8所示。

图8 加热面设定温度阶跃扰动曲线Fig.8 The step disturbance curve of set temperature of heater
仿真分析机械泵控温的模糊增量控制对于温度变化的跟随响应特性,并与开环以及PID控制下的动态响应特性进行对比,见图9。从曲线可以看出:在开环状态下,封装加热面和喷雾装置温度均上升大约10 ℃左右,然后逐渐达到稳定;与PID控制相比,模糊增量控制下的温度响应曲线能够更快速地达到稳态,响应时间短,具有良好的控制鲁棒性能。

图9 加热面设定温度周期性阶跃扰动时系统参数温度响应Fig.9 Temperature responses of system under heater setting periodical step disturbance of set temperature of heater
3.4空间外热流按正弦规律周期性扰动
航天器在轨工作时,其接受的外热流随着航天器的运行周期呈周期性变化,为了更真实地反映在轨飞行的航天器外热流周期性变动对于热控系统的影响,以及模糊增量控制下的系统控温效果,设定外热流密度Qw存在按正弦规律变化的周期性扰动,

式中:Qw,s为系统稳态时辐射器表面的外热流;扰动振幅 Ar=0.5Qw,s;T为航天器轨道周期;频率ω=2π/T,φ=0。
图10为空间外热流发生周期性阶跃扰动时,毛细分离式喷雾冷却回路热控系统封装加热面和喷雾装置的温度动态响应,其中黑色曲线为系统开环时的动态特性;红色曲线为以机械泵驱动电压为控制对象的PID控制响应;蓝色曲线为模糊增量控制作用下的动态响应。从曲线可以看出:在开环状态下,当外热流出现周期性扰动时,封装加热面及喷雾装置温度均发生周期性的变化,且各个节点温度变化曲线相似,其中封装加热面温度以及喷雾装置的最大温升为3.8 ℃左右;在PID控制下,两节点温升在1.2 ℃左右,而在模糊增量控制下的节点温升只有0.5 ℃左右,可见模糊增量控制对周期性外热流变化的扰动也有很好的控制效果,超调量小,趋稳时间短。
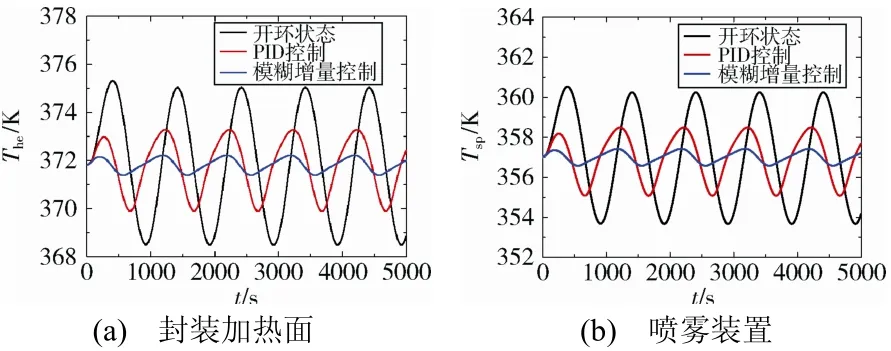
图10 外热流周期性扰动时系统参数温度响应Fig.10 Temperature responses of system under periodical disturbance of external heat flux
4 结束语
本文对毛细分离式喷雾冷却回路热控系统原理进行了分析,采用节点热网络法建立该热控系统4节点热网络模型,并对热控系统的控制策略进行仿真验证。仿真结果表明:与PID控制相比,模糊增量控制下的机械泵驱动电压调节变化更为平稳,没有超调且达到稳态时间短,保证了系统的平稳控制;并且在外热流周期变化较大时,各个节点温度在一个周期内能够很快达到并维持稳态阶段,具有良好的控制响应速度、自适应能力和鲁棒性能。后续将通过搭建喷雾冷却回路热控系统试验系统以及控制系统,进一步验证该方法的可行性。
(
)
[1]Ley W, Wittmann K, Hallmann W.Handbook of space technology[M].American Institute of Aeronautics & Astronautics, 2009: 2-4
[2]谭维炽, 胡金刚.航天器系统工程[M].北京: 中国科学技术出版社, 2009: 164-201
[3]Westheimer D T, Tuan G C.Active thermal control system considerations for the next generation of human rated space vehicles[C]//43rdAIAA Aerospace Sciences Meeting and Exhibit.Reno, NV, 2005
[4]田春霞, 仇性启, 崔运静.喷嘴雾化技术进展[J].工业加热, 2005, 34(4): 40-43 Tian Chunxia, Qiu Xingqi, Cui Yunjing.Development of technology on atomization[J].Industrial Heating, 2005,34(4): 40-43
[5]Fabbri M, Jiang S, Dhir V K.A comparative study of cooling of high power density electronics using sprays and microjets[J].Transactions of the ASME, 2005, 127:38-48
[6]Silk E A, Kim J, Kiger K.Spray cooling of enhanced surfaces: impact of structured surface geometry and spray axis incliation[J].International Journal of Heat and Mass Transfer, 2006, 49(25/26): 4910-4920
[7]Mudawar I, Estes K A.Optimization and predicting CHF in spray cooling of a square surface[J].Journal of Heat Transfer, 1996, 118: 672-680
[8]Estes K A, Mudawar I.Correlation of sauter mean diameter and critical heat flux for spray cooling of small surfaces[J].International Journal of Heat and Mass Transfer, 1995, 38(16): 2985-2996
[9]Lin L C, Ponnappan R.Heat transfer characteristics of spray cooling in a closed loop[J].International Journal of Heat and Mass Transfer, 2003, 46: 3737-3746
[10]Silk E, Kim J, Kiger K.Investigation of enhanced surface spray cooling[C]//Proceeding Conference of International Mechanical Engineering Congress.Anaheim, 2004
[11]刘志春.新型平板式CPL的理论分析与实验研究[D].武汉: 华中科技大学, 2006: 50-52
[12]Balasubramaniam R, Nayagam V, Hasan M M, et al.Analysis of heat and mass transfer during condensation over a porous substrate[J].Analysis New York Academy of Sciences, 2006, 1077: 459-470
[13]Hasan M M, Khan V, Nayagam R.Conceptual design of a condensing heat exchanger for space systems using porous media[C]//International Conference for Environmental Systems.Rome, Italy, 2005
[14]Kaya T, Perez R, Gregori C, et al.Numerical simulation of transient operation of loop heat pipes[J].Applied Thermal Engineering, 2008, 28(8/9): 967-974
[15]Valeri V V, Roger R R.Mathematical model of a loop heat pipe with cylindrical evaporator and integrated reservoir[J].Applied Thermal Engineering, 2008, 28(8/9): 942-954
[16]宁献文, 张加迅.基于泵变频调速的航天器热控制技术[J].中国空间科学技术, 2011, 31(2): 47-52 Ning Xianwen, Zhang Jiaxun.Spacecraft thermal control technology based on variable frequency pump[J].Chinese Space Science and Technology, 2011, 31(2): 47-52
[17]黄家荣, 范宇峰, 禹颂耕, 等.神舟七号飞船单相热控流体回路在轨性能评价[J].航天器工程, 2009,18(4): 37-43 Huang Jiarong, Fan Yufeng, Yu Songgeng, et al.On-orbit performance evaluation of single-phase fluid loop system for Shenzhou-7 spaceship[J].Spacecraft Engineering, 2009, 18(4): 37-43
[18]李运泽, 魏传锋, 袁领双, 等.应用 PTC电加热器的卫星局部温度控制系统仿真[J].系统仿真学报, 2005,17(6): 1494-1496 Li Yunze, Wei Chuanfeng, Yuan Lingshuang, et al.Simulation study of satellite partial temperature control system using PTC heater[J].Journal of System Simulation, 2005, 17(6): 1494-1496
(编辑:张艳艳)
Simulation analysis of thermal control system using capillary separate spray cooling loop based on mechanical pump
Wang Jin1, Gong Mengmeng2, Li Yunze3, Wang Jun3
(1.Beijing Institute of Astronautical Systems Engineering, Beijing 100076, China;2.Research and Development Center, China Academy of Launch Vehicle Technology, Beijing 100076, China;3.School of Aeronautics Technology and Science, Beihang University, Beijing 100191, China)
To realize high heat flux dissipation for spacecrafts operating in the harsh space environment and in different working modes, a well-designed thermal control system using the capillary separate spray cooling loop (CSSCL)based on the PID and fuzzy incremental control strategy with a mechanical pump is presented.A 4-node thermal network mathematical representation is established by the node network method and is implemented by the numerical simulation method to analyze the temperature dynamic performance of the thermal control system.The result shows that the CSSCL thermal control system based on the fuzzy incremental control strategy with the pump can achieve a precise thermal control of the controlled object with a faster response and a smaller overshoot than the PID control, which can be used for the development of future spacecraft with the need of high heat flux dissipation of space electronics.
spray cooling loop; thermal control system; fuzzy increment; mechanical pump; node network method
V444.3+6
A
1673-1379(2015)06-0599-08
10.3969/j.issn.1673-1379.2015.06.006
王 瑾(1988—),女,博士学位,研究方向为航天器热控制及热管理;E-mail: wj920buaa@163.com。指导教师:李运泽(1972—),男,教授,博士生导师,主要研究方向为航天器热控制、热管理,飞机机载能源与环境控制,飞行器环境模拟与试验等。
2015-04-14;
2015-11-15
