六足仿生机器人并联运动学分析
2015-10-30于常娟张明路张建华刘庆玲
于常娟,张明路,张建华,刘庆玲
(1.廊坊师范学院 数信学院,廊坊 065000;2.河北工业大学 机械工程学院,天津 300130)
0 引言
近年来,自然界动物与生俱来的运动方式,越来越引起机器人研究者们的注意,对如何在机器人身上得以实现进行深入研究。为了提高腿部运动的灵活性,增强对非结构化地形的适应能力和可通过性,这样每条腿具有根关节、髋关节、膝关节三个关节,通过改变变形关节的角度,从而改变腿的姿态,因此可模仿蜘蛛、螃蟹、壁虎等多种动物的行走姿态[1]。当利用三角形步态行走时,三条腿并联支撑机体成为3-UR并联机构,三条腿的关节配合转动使机体向前运动。
传统的D-H参数法计算正解,过程繁琐,而且对于存在关于y轴的运动时,不能直接利用该方法求解。本文利用旋量理论和指数积方法计算正运动学模型,利用消元理论建立逆运动学模型,分别得到该并联机构的显示正解和逆解。
1 并联机构的正运动学分析
六足机器人选择三角形步态,不但稳定性较高而且运动速度较快,是六足机器人中最常用的步态。如图1所示,行走时机身一侧两端的腿和对侧中间的腿作为一组,其余腿为另一组行走时两组腿交替摆动和支撑,在其中一组腿摆动时另一组腿处于支撑状态,支撑的三条腿与机身构成3支链的并联机构向前运动,即摆动和移动同时进行,这种步态设计可以提高前进速度[2,3]。
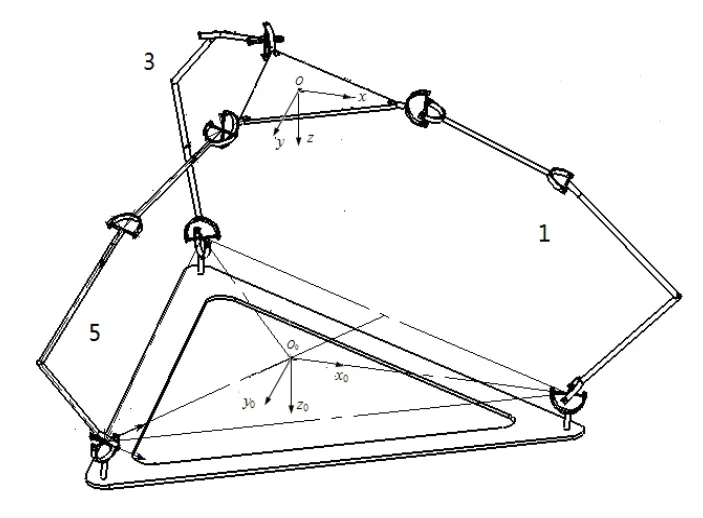
图1 并联机构示意图
研究腿1、腿3、腿5构成的3-UR并联机构,为简化研究,设上平台为等边三角形,边长为上l。在上平台建立坐标标系 xyzo- ,下平台建立坐标标系。坐标系原点分别位于上下平台中心位置,z轴与z0分别垂直上平台和下平台向下,y轴和y0轴分别平行于腿3和腿5与上下平台的交点指向外。并联机构的正运动学求解即已知腿部各关节角度求上平台坐标标系 xyzo- 相对于下平台坐标标系的位姿。基于物体的位姿描述的相对性,这里设上平台是静平台,下平台是动平台,即计算下平台相对上平台的位姿矩阵,然后换算得到上平台相对惯性坐标系(下平台)的位姿矩阵[4~6]。
腿部初始位置:杆件2与杆件3都与x轴重合,水平向右,杆件4沿y轴正方向。杆件2和杆件3长度分别是l2和l3。
各关节的螺旋轴线方向 )3,2,1(=iwi分别为:


图2 机器人腿部简图
轴线上点的坐标qi分别为:




足端位姿矩阵即足端相对于上平台坐标系 xyzo-的位姿矩阵为:

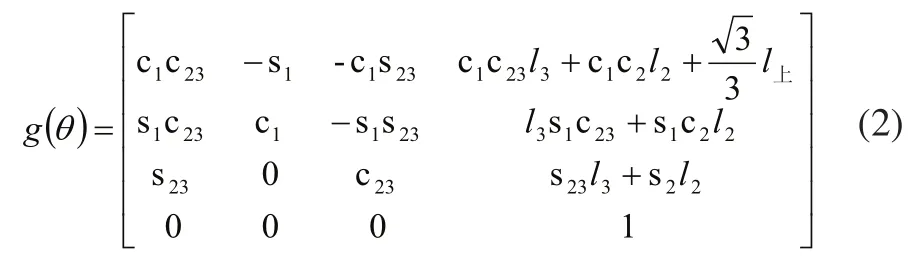
其中:
cij为;
sij为。

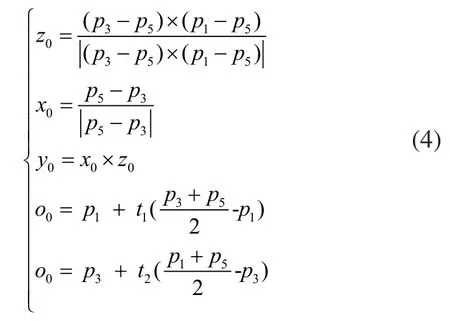
式(4)中后两个方程为下平台三角形两条中线的方程。至此求出了下平台相对于上平台的位姿矩阵。
由于实际中,下平台是静平台,上平台是动平台,根据运动的相对性,两坐标系轴的相对角度互为相反数,两平台坐标系的原点相对坐标也互为相反数[7~9]。因此上平台坐标系 xyzo- 关于下平台坐标系的位姿矩阵可由求出。
2 并联机构的逆运动学分析
已知足端坐标p1:
根据合分比定理:

根据式(3)得:

同理可求出腿3和腿5各关节的角度逆解。
3 正解和逆解的实例验证
已知上l=20cm,2l=20cm,3l=15cm。并联机构正解的输入为各关节转角如表1所示。根据式(3),腿1足端相对于上平台坐标系的位置坐标为,其中p1=[29.90916341,10.60139688,24.48888739]同理,腿3和腿5足端相对于上平台坐标系的位置坐标为和为p3=[11.77724687,7.550749564,22.99038106]p4=[9.836104037,19.01221065,28.63102302]根据式

表1 并联机构各关节转角

根据正解式(6),计算逆解其输出,利用解析几何方法反求p1、p3和p5,
再根据式(5),求得各转角和表1完全一致,说明正解输出为逆解的输入,而逆解的输出为正解的输入,当角度改变依然能得出相同结论,验证了正解和逆解的正确性[13~15]。
4 结论
对六足仿生机器人三足支撑并联机构进行了运动学分析:
1)利用旋量理论和指数积方法建立其正运动学模型。
2)利用消元方法建立其逆运动学模型,并得到该并联机构的显示逆解。
3)最后通过正解和逆解的输入和输出关系验证了正解和逆解结论的正确性。
六足仿生机器人三足并联机构运动学模型的建立为下一步进行六足机器人并联动力学分析和控制打下基础。
[1] 宋孟军,张明路.多足仿生移动机器人并联机构运动学研究[J].农业机械学报,2012,43(3).200-205.
[2] Zhiying Wang,Xilun Ding,Alberto Rovetta,,et al.Mobility analysis of the typical gait of a radial symmetrical six-legged robot[J].Mechatronics 2011,21(7):1133-1146.
[3] J. Estremera, J.A. Cobano, P. Gonzalez de Santos.Continuous freecrab gaits for hexapod robots on a natural terrain with forbidden zones: An application to humanitarian demining[J].Robotics and Autonomous Systems 2010,58:700-711.
[4] 刘玉斌,赵杰,蔡鹤皋.新型6-PRRS并联机器人运动学和动力学研究[J].吉林大学学报,2008,38(5):1220-1224.
[5] D.A. Axinte, J.M. Allen,R.Anderson,et al. Free-leg Hexapod: A novel approach of using parallel kinematic platforms for developing miniature machine tools for special purpose operations[J].CIRP Annals-Manufacturing Technology, 2011,(1):395-398.
[6] Diansheng Chen, Junmao Yin, Kai Zhao, et al.Bionic Mechanism and Kinematics Analysis of Hopping Robot Inspired by Locust Jumping[J].Journal of Bionic Engineering 2011, 8(4):429-439.
[7] 宋孟军,张明路.仿生移动机器人并联机构运动学正解的鱼群算法求解[J].中国机械工程,2012,23(9):1029-1024,1035-1036.
[8] 吕世增,张大卫,刘海年.基于吴方法的6R机器人逆运动学旋量方程求解[J].机械工程学报,2010,46(17):35-41.
[9] 钱东海, 王新峰,赵伟,等.基于旋量理论和Paden-Kahan子问题的6自由度机器人逆解算法[J]. 机械工程学报,2009,45(9):72-76,81.析[J].农业机械学报,2012,43(8):215-220.
