考虑行驶状态的水泥路机动车噪声排放模型∗
2015-10-28蔡铭谢林华张磊
蔡铭 谢林华 张磊
(中山大学工学院广东省智能交通系统重点实验室 广州 510006)
考虑行驶状态的水泥路机动车噪声排放模型∗
蔡铭†谢林华张磊
(中山大学工学院广东省智能交通系统重点实验室广州510006)
本文旨在建立机动车单车辆的基础噪声排放模型,通过对大中小车辆在加速、减速、匀速及怠速状态下A计权声压级进行测量,运用回归分析方法拟合实验数据,得到考虑车型和行驶状态的水泥路面机动车单车辆噪声排放模型,并利用另一部分实测数据进行对比验证。误差分析显示:比较《公路建设项目环境影响评价规范(JTG B03-2006)》中的噪声模型,本研究建立的单车辆噪声排放模型预测精度更高。
交通噪声,排放模型,加速度,水泥路面
1 引言
机动车噪声污染排放模型研究旨在建立机动车噪声排放与其影响因素之间的数学关系或物理关系。理论上的,为建立机动车噪声排放模型,研究者应根据机动车噪声产生机理,对影响机动车噪声排放的主要因素进行识别和测量。之后,通过数学统计和物理分析等方法对样本数据进行分析,构建机动车噪声排放模型。然而,在实际研究中,由于影响机动车噪声的因素复杂,许多因素难以测量,建立考虑各种影响因子的排放模型比较困难,甚至不可能实现。因此,现有的研究中,大都对机动车噪声相关性最大的一个或几个参数进行分析测量。
美国联邦公路局(FHWA)提出了适用于美国高速公路交通噪声排放模型[1],Thanaphan Suksaard等拟合泰国曼谷公路的实测数据,得到适用于泰国的单车辆噪声排放模型[2],我国的《公路建设项目环境影响评价规范(JTG B03-2006)》(以下简称《规范》)[3]也给出了符合国内车辆质量和路面状况的机动车单车辆噪声排放模型。然而,这些机动车噪声排放模型只引入速度作为单一变量。李锋等在研究交叉路口汽车行驶状态变化对交通噪声的影响中,计算出车辆在加速和减速行驶时的噪声排放的修正值,并作为一个常量引入到单车辆噪声排放模型进行修正计算[4],但这种修正方法忽略了不同加速度大小对机动车噪声影响差异。林郁山等将车辆加速度作为变量引入到对车辆噪声排放的计算中[5],但其只研究了沥青路面排放模型,没有考虑水泥路面状况,并且忽略了机动车怠速状态的排放模型。
为了最大程度的减小机动车噪声排放,路面噪声成为不可忽视的问题。水泥混凝土路面具有强度高、稳定性好等优点,广泛应用于国内外公路建设中。相比较沥青混泥土路面,传统水泥混凝土路面材质偏硬、刚度较大,减振缓冲效果差,车辆行驶过程中产生的振动大,加上路表面存在防开裂接缝,产生的路面噪声较为严重[6-7]。降低水泥混凝土材料铺设的城区主干道、人口稠密区域道路以及隧道等路面噪声,己成为环保部门、交通部门、工程技术部门必须考虑和亟需解决的问题[8-9]。在现有的研究中,美国对水泥混凝土路面上不同纹理产生噪声的机理和降噪措施进行了研究,发现改进路面纹理的降噪效果要优于改进轮胎花纹的降噪效果[10]。荷兰对多孔混凝土路面进行声强测试,结果显示,比较普通水泥混凝土路面,多孔混凝土路面可使噪声降低5分贝[11]。我国交通部西部交通建设科技项目“低噪声水泥混凝土路面研究”也对低噪声路面的降噪技术进行了研究,提出了适合我国国情的低噪声水泥混凝土路面材料组成和施工工艺[12]。然而,这些研究都仅分析了不同水泥混凝土路面结构和路面纹理的减噪降噪效果,没有总结出不同速度、加速度下,水泥路面单车辆噪声排放模型,国内的研究也未能总结出适用于我国国情(因机动车质、燃油质量等存在差别而不同)的水泥路的噪声排放模型。
综合分析现有的研究,单车辆噪声排放模型大多以速度作为回归参量,少有考虑加速度参量,实验的路面材料也大都为沥青路面。而综合各种运行状态的水泥路机动车噪声排放模型还未见于文献。据此,本文在实验测量的基础上,考虑车型、运行状态(包括加速、减速、匀速、怠速)以及路面状况,利用回归分析的方法,建立水泥路面上机动车噪声排放模型。
2 实验方案
2.1实验条件
按照《汽车加速行驶车外噪声限值及测量方法GB 1495-2002》[13]的要求,规定本次机动车单车辆噪声监测实验应满足如下条件:
(1)测量时应避开大风、雨、雪等恶劣气象条件,避免在道路表面潮湿时进行测量。湿度主要影响高频声源(噪声的主要成分在3000 Hz以上),因此,整个测量实验应限于相似的相对湿度下进行;
(2)测量点附近没有任何影响声场的障碍物、反射物和吸声材料;实验人员应站在不影响仪器测量的位置;
(3)选在背景噪声变化不明显的时段开展试验。为排除周边建筑施工和生产活动的干扰,有效地对单辆车噪声排放进行测量,本次试验选择在早上6:00-7:30,中午12:30-2:00,晚上21:30-23:00进行。
2.2实验路段选择
实验选取在广州市南浦大道、西乡三路、广州大道北南湖乐园段等多个路段的信号控制交叉口进行,保证车辆有明显加速、减速行为。这些路段的路面材料均为水泥混凝土,且实验时车流量较小,容易测量单辆车的噪声排放。本次实验对多个水泥混凝土路段的单车辆噪声进行长期监测,以减小随机性对实验结果影响。实验路段如图1所示。

图1 实验场景Fig.1 Experimental scene
2.3测量仪器及布置
本研究使用美国STALKER(斯德克)LIDAR型激光测速仪进行车速测量。实验时,测速仪射线方向与被测车辆行驶方向在同一条直线上,测速仪与被测车辆应保持一定的距离,以减少测速的角度误差对测量精度的影响。同时,按照《规范》的车型分类标准记录目标车辆的车型。
噪声测量仪器为爱华AWA6228频谱分析仪,测量时,频谱分析仪距离第一车道中心线7.5 m,离地高度1.2 m,测量声级为A计权声压级。各路段的实验测量原理如图2所示。
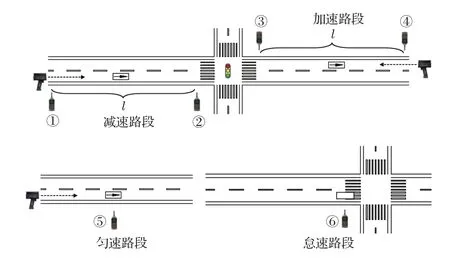
图2 实验测量原理图Fig.2 Schematic diagram of the experimental measurement
图2中①②为车辆减速状态的测量点,③④为车辆加速状态的测量点,⑤为车辆匀速状态的测量点,⑥为车辆怠速状态的测量点,其中①与②、③与④之间距离均为30.0 m。实验时,测量并记录车辆对应的速度和噪声信息。
3 实验数据处理
3.1实验数据量
实验时,剔除与背景噪声差值过小及受其他声源干扰的异常测量数据,共获得有效实验数据2535组(见表1),并对实验数据进行距离修正和背景噪声修正。
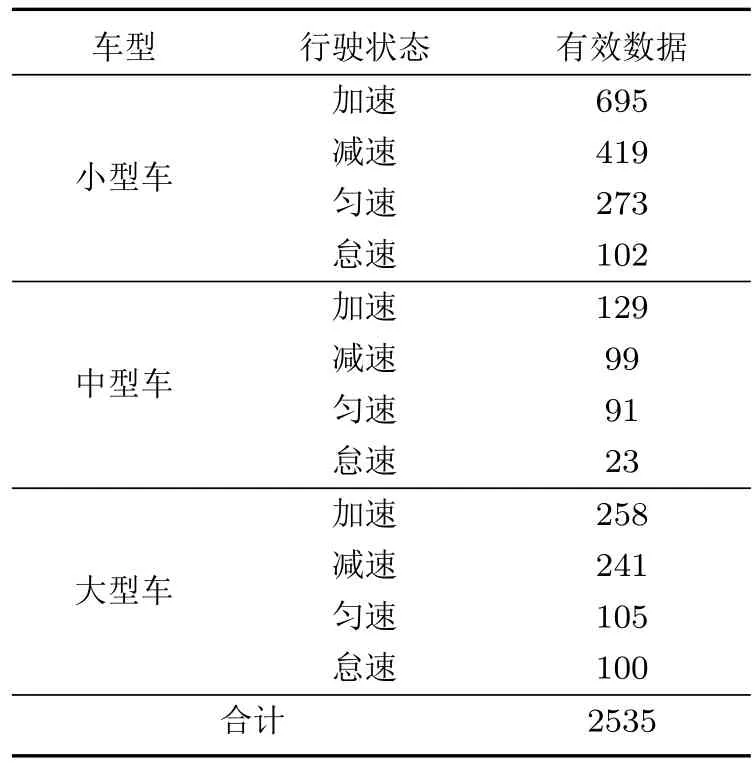
表1 实验监测的数据量Table 1 Monitoring data of experiment
3.2距离修正
考虑声音传播时会发生衰减现象,当被测车辆处于其他车道(非第一车道)时,应对测得的噪声值进行距离修正。根据点声源在空气中传播衰减规律[14],得出修正公式(1):

式中,L——实际测量的噪声值,dB;L0——修正后的噪声值,dB;R——非第一车道距噪声仪距离,m;R0=7.5 m。
3.3背景噪声修正
对噪声测量值进行背景噪声修正,旨在求得扣除背景噪声影响后被测车辆的噪声实际贡献。所要扣除的背景噪声值,按照《规范》的要求进行计算,参见表2。
3.4噪声值与速度、加速度对应关系建立
对噪声值进行距离和背景噪声修正后,利用公式(2),可以计算出被测车辆在测量点上的加速度a,建立车辆噪声值与加速度对应关系。

式中,a——被测车辆加速度,m2/s;V1——被测车辆经过第一个测量点(①、③)时的速度,m/s;V2——被测车辆经过第二个测量点(②、④)时的速度,m/s;l——测量点间的距离,本次试验为30.0 m。注:由于加速、减速测量距离较短,实验将车辆运动视为匀加速和匀减速运动。
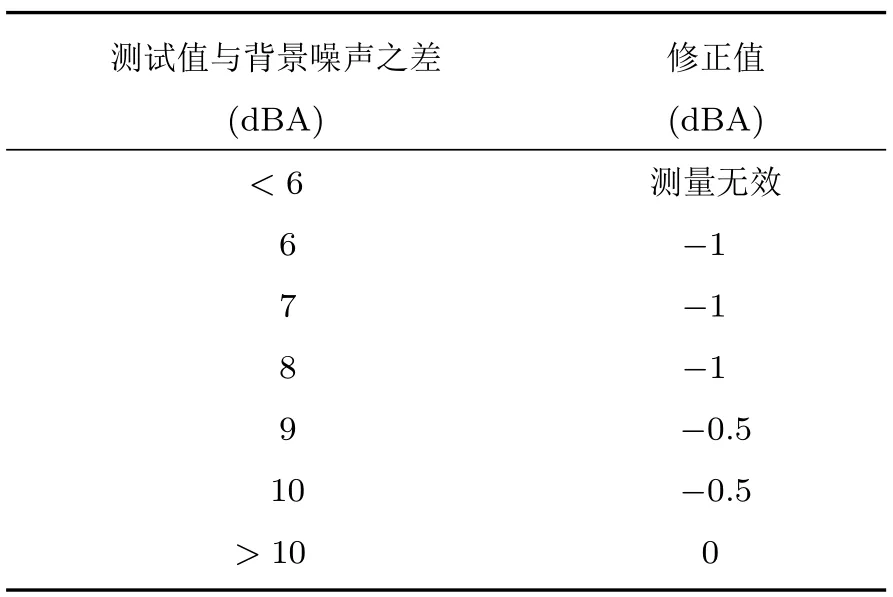
表2 背景噪声修正值Table 2 Modified value of background noise
4 实验数据分析
4.1车辆匀速状态下排放模型分析
运用回归分析的方法,拟合车辆处于匀速状态下的实验数据,得到区分车型的水泥路面车辆噪声排放与速度关系式,如公式(3)所示。其中,比较计权A声级L与速度V,L与lgV在散点图中的点线匹配效果,L与lgV有较好的拟合优度,因此,本实验拟合的速度变量取lgV。
式中,LO——机动车单车辆噪声源强A计权声压级,dBA;V——车辆速度,km/h;S,M,L——小型车,中型车,大型车。
将本研究拟合的匀速状态下水泥路噪声排放模型(公式(3))与《规范》中的模型(公式(4))进行对比,并绘制数据拟合对比曲线如图3~5所示。
《规范》:
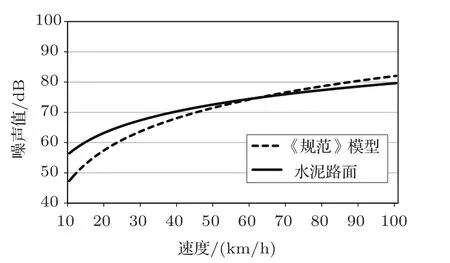
图3 小型车拟合曲线对比Fig.3 Fitting curve of small cars
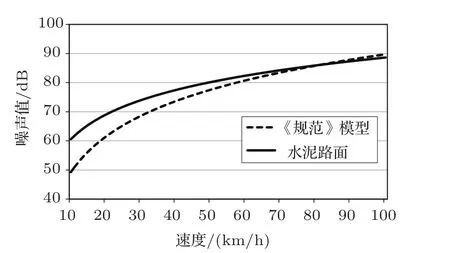
图4 中型车拟合曲线对比Fig.4 Fitting curve of medium cars
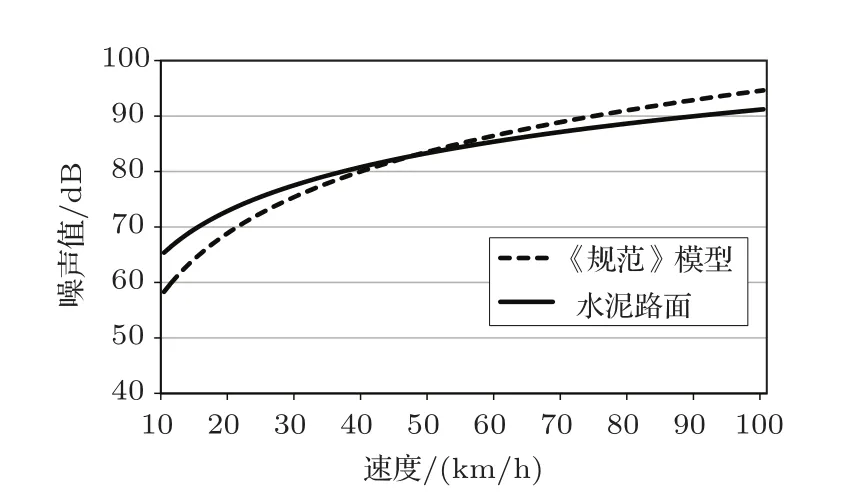
图5 大型车拟合曲线对比Fig.5 Fitting curve of large cars
通过对比本研究模型与《规范》模型,不同车型下,两种噪声排放模型曲线均有较好的一致性。总体上来看,本研究的噪声排放曲线比《规范》的曲线略高,这表明水泥路面上的车辆噪声排放偏高。在速度较高阶段,二条曲线交错,并趋于一致,这表明在较高速情况下,路面材料对噪声排放影响较小,这些特征与实际情况是一致。
4.2考虑加减速的排放模型
发动机噪声是车辆噪声的重要组成部分,发动机噪声排放量与发动机的工作状态直接相关。车辆处于加速和减速状态的发动机噪声与其处于匀速状态的噪声排放量存在较大差别,即使在相同的速度下,加速度不同的车辆所辐射的噪声是不同的。特别地,车辆在减速情况下,通常还伴有刹车噪声,从而抬高了减速状态下机动车的噪声排放。因此,车辆噪声排放模型不能忽略汽车的加减速状态,将车辆运动时的加速度作为自变量纳入模型中是有必要的。
运用多元回归分析的方法,对测量的机动车单车噪声值LO、瞬时速度V和瞬时加速度a数据进行拟合,得到加减速状态下,区分车型的水泥路面车辆噪声排放与速度、加速度的关系式,如公式(5)~(7)所示。
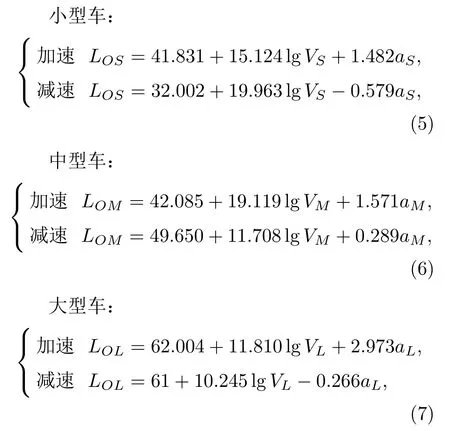
式中,a——车辆加减速时的加速度值,m/s2,其中a≠0。
为了表征拟合变量之间的相关程度,本研究计算了拟合相关系数r,如表3所示。
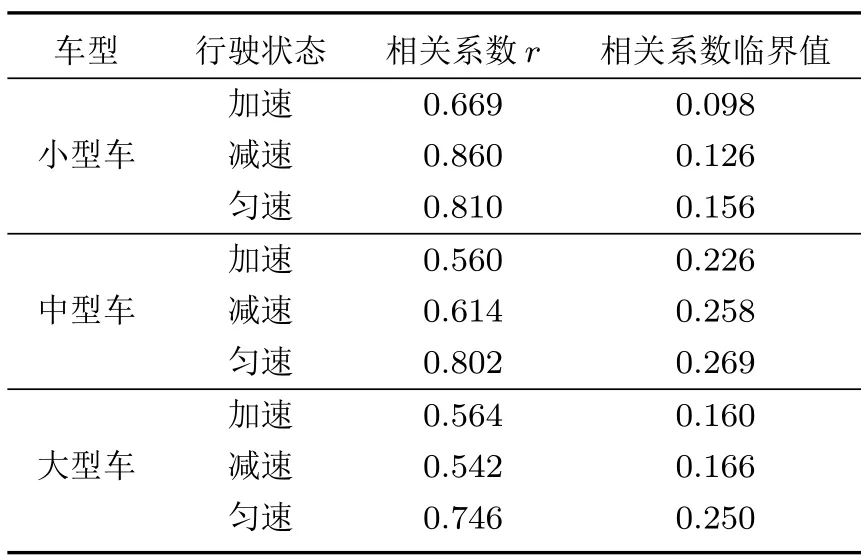
表3 各实验数据的拟合相关系数Table 3 Correlation coefficient of fitting the experimental data
由表3可知,本次实验拟合相关系数均远大于其临界相关系数,所得结果满足显著性水平α=0.01的检验,证明本研究模型回归拟合的可靠性强。
4.3考虑怠速的排放模型分析
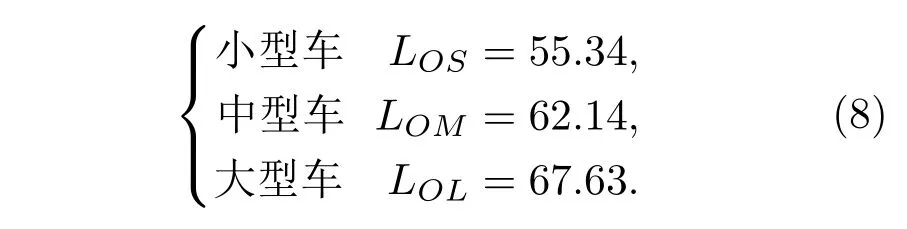
怠速工况时,发动机通常处在一个稳定运转状态下,噪声排放状况也保持一个较为稳定的状态,因此怠速噪声排放应该为一个常量。此时噪声主要为发动机运转产生的噪声,不存在轮胎路面噪声[15]。
考虑到实际的道路行驶过程中,车辆是通常由减速状态过渡到怠速状态,怠速噪声排放预想为车辆减速排放模型在速度和加速度为零的值。在实验过程中,我们发现,这一预想与实际状况不符。究其原因,减速状态的排放模型是通过回归分析的方法拟合速度和加速度变量得到,当速度和加速度均为零时,模型即认为此时的噪声大小等同背景噪声。显然地,怠速时发动机处于空转状态,依然存在一定量的噪声辐射,特别是大型车怠速时,噪声排放尤为明显,实测的怠速测量排放数据证明了这一点。因此,本次试验中,分车型测量机动车怠速时的噪声排放值,取平均值后,得怠速排放模型公式(8)所示。
4.4实测数据检验
4.4.1单辆车噪声模拟精度对比
为检验模型的正确性,本研究选取另一部分实测数据进行对比验证,其中小型车151组,中型车70组,大型车114组。并计算本研究模型和《规范》模型的预测误差和标准差,如表4所示。其中,“本模型误差”为本研究模型计算值(以实测的瞬时速度V和瞬时加速度a计算)与实测值之差的绝对值,“《规范》误差”为《规范》模型计算值(仅以实测的瞬时速度V计算)与实测值之差的绝对值。
为了直观的对比模型的误差,表达误差的离散特性,绘制出散点图,并拟合其误差曲线。如图6~图8。其中是以车辆匀速、加速、减速状态下实测噪声值为横坐标,以本研究模型计算出的噪声值为纵坐标绘制的点为其对应的拟合直线;×是以车辆的实测噪声值为横坐标,以《规范》模型计算出的噪声值为纵坐标绘制的点为其拟合直线表示实测值,作为误差对比参照线。
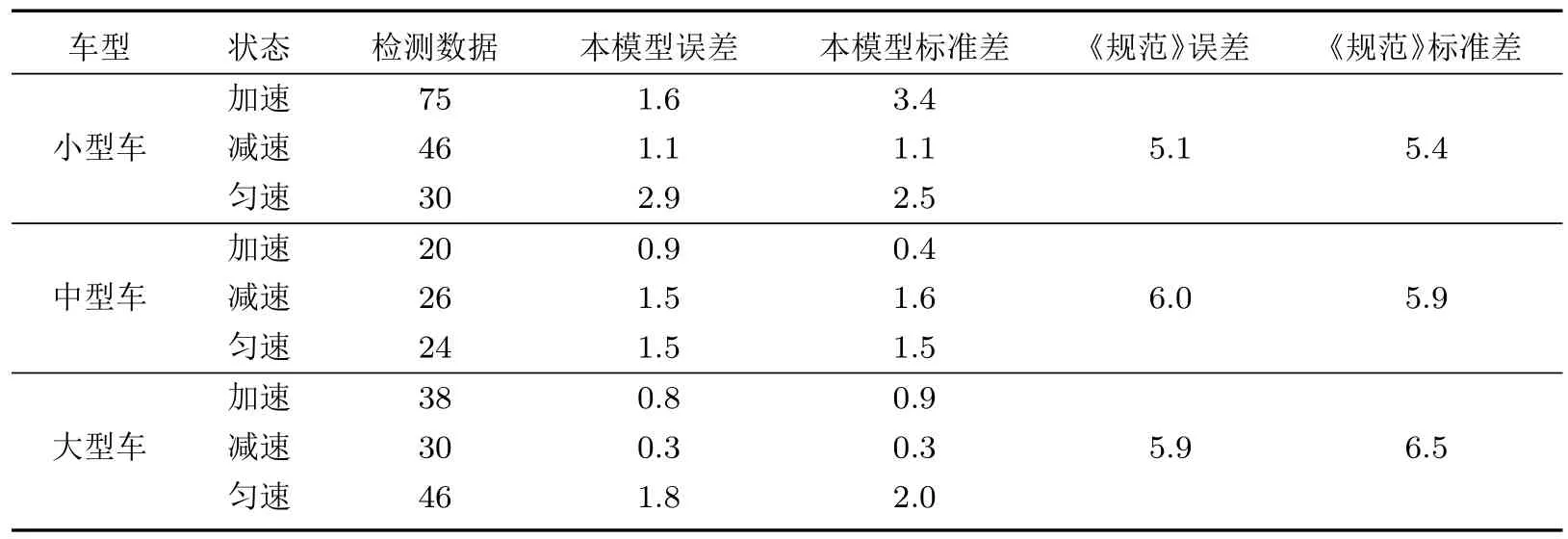
表4 两种模型预测误差和标准差对比Table 4 Comparison of two models on prediction error and standard deviation
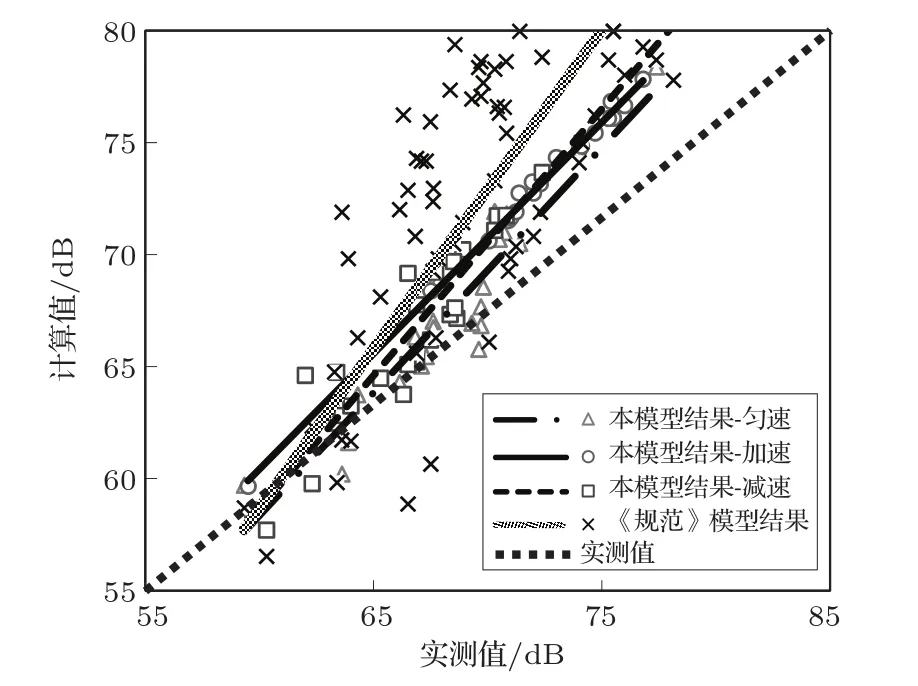
图6 小型车计算结果对比Fig.6 Comparison results of small cars
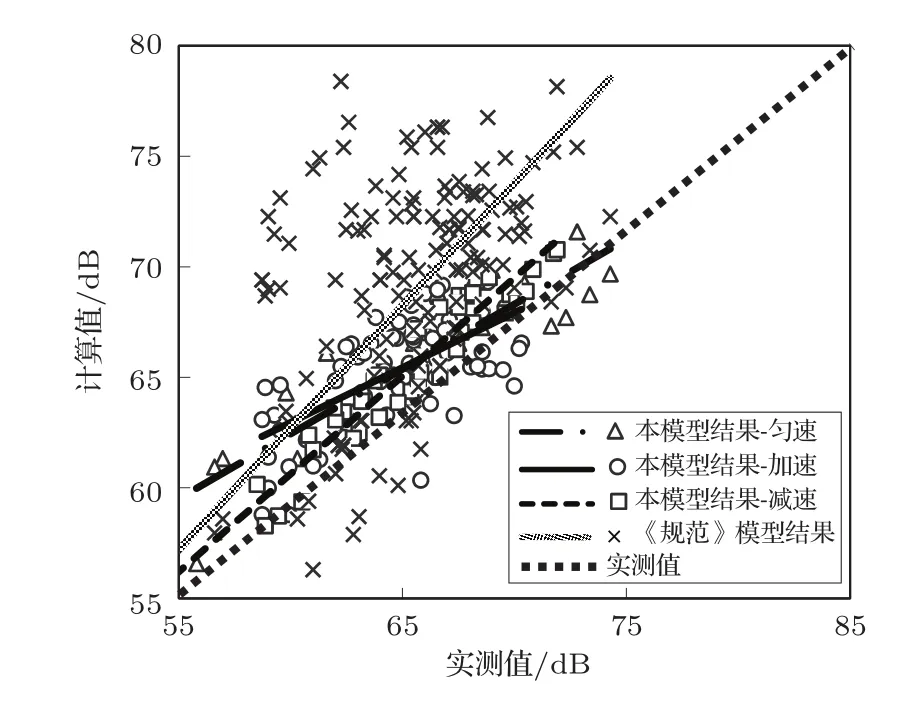
图7 中型车计算结果对比Fig.7 Comparison results of medium cars
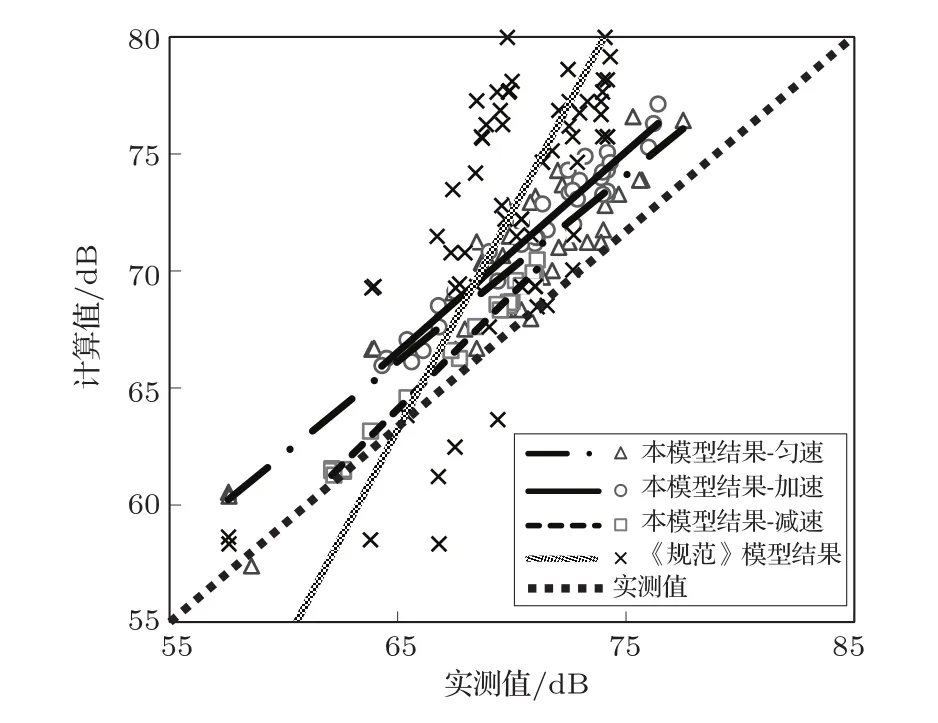
图8 大型车计算结果对比Fig.8 Comparison results of large cars
由表4和散点图(图6~图8)可知,考虑车型、运动状态的排放模型的误差较小,其平均误差为1.4 dB,拟合的直线也较为集中在实测值(对角线)附近,而《规范》的误差较大,其平均误差为5.6 dB,较实测值远。表4的标准差对比结果也显示,本研究模型的计算结果标准差较小,预测的准确度较高。
由于本研究区分车型和路面状况,拟合的模型包含速度、加速度变量,所得预测误差较小。而《规范》模型忽略车辆加减速状态和路面状况,其预测误差较大。值得注意的是:《规范》模型为2006年出台的,而本研究采集车辆噪声数据时间为2013年10月至2014年4月。因此,《规范》模型的对比误差也与近年来汽车设计制造工艺的提高、燃油品质提升以及路面状况的改善等因素有关。
4.4.2混合车流噪声模拟精度对比
为验证本模型对混合车流噪声模拟的适用性,本研究选取广州市白云区沙太北路与中成路交接处的信号控制T字交叉口,进行等效连续A声级的实地测量。测量点①~⑩的布置如图9所示,测量点距离沙太北路最外车道等效行车线7.5 m,其中①~⑤为减速测量点,⑥~⑩为加速测量点,测量点④和⑦与沙太北路两个入口道的停车线对齐。测量时间60 min。该交叉口红绿灯总周期200 s,有三个相位:第一个相位为沙太北路直行与右转允许通过,绿灯时间90 s;第二个相位为沙太北路左转车辆允许通过,绿灯时间50 s;第三个相位为中成路左转允许通过,绿灯时间60 s。
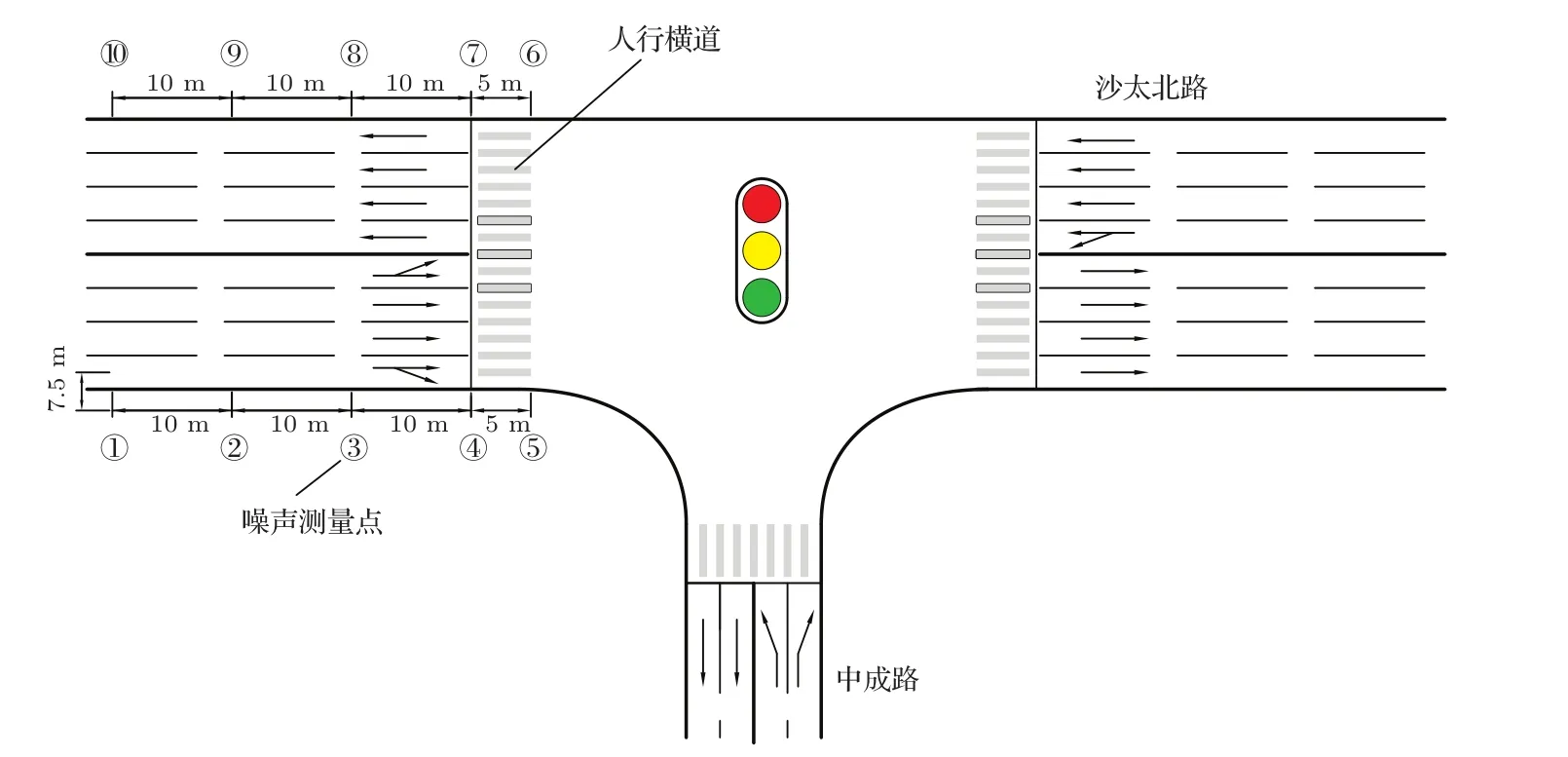
图9 实测交叉口示意图Fig.9 Layout of the signalized intersection
以该交叉口实际测量的信号灯周期、车流量、车型比例等数据作为仿真参数,分别采用本研究模型与《规范》模型,编写Paramics噪声计算插件进行动态仿真计算,仿真时间1 h,每秒采样1次。实测和仿真结果如表5和图10所示。
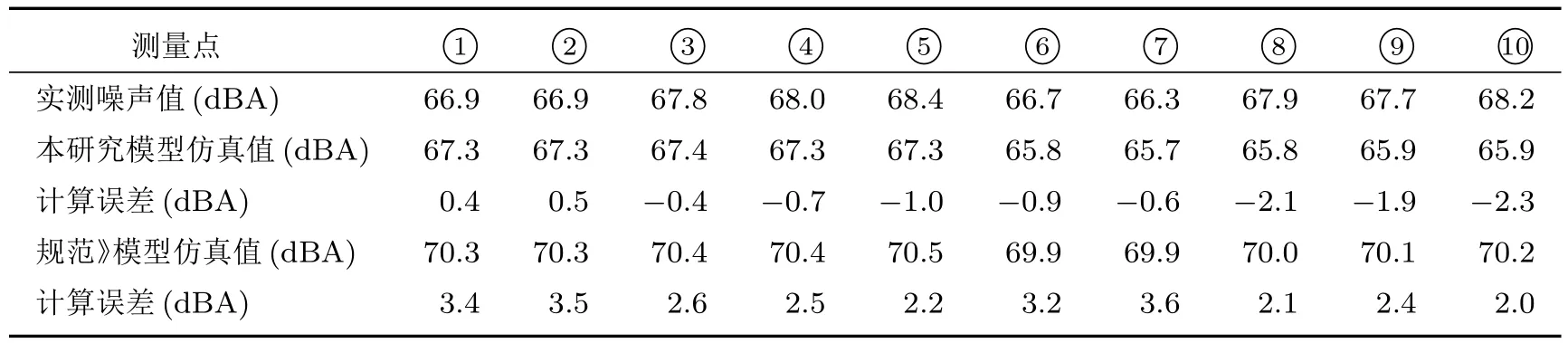
表5 计算机动态仿真结果Table 5 Calculation result of computer dynamic simulation
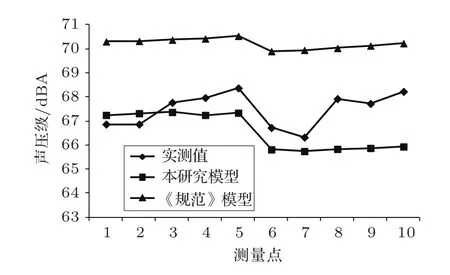
图10 计算结果与实测值对比Fig.10 Comparison of the calculation results and the measured values
由表5和图10可知,以《规范》模型为基础的计算结果误差为2.7 dBA,以本研究模型为基础的计算结果误差为1.1 dBA,计算精度提高了约1.6 dBA,证明本研究模型对提高混合车流的噪声计算精度是显著的。值得注意的是,在使用《规范》模型进行噪声模拟计算时,由于输入的是不同时刻各车辆的瞬时速度,在一定程度上就已经包含了一定的加速度信息,其计算精度比直接输入平均速度的计算结果要高。而对于本研究模型来说,由于其输入参数是瞬时速度和瞬时加速度,所得预测误差较《规范》模型预测误差进一步减小。
5 结论
本研究通过拟合水泥路面机动车单车辆噪声排放数据,得到区分车型、路面状况且包含速度、加速度的机动车噪声排放模型,并利用另一部分实测数据将该模型和《规范》的计算模型进行对比验证。结果表明:比较《公路建设项目环境影响评价规范(JTG B03-2006)》中的噪声模型,本研究建立的单车辆噪声排放模型所预测的结果误差较小,更接近于实测噪声值,预测精度更高,能够更好地吻合机动车噪声排放的实际情况。
车辆行驶状态反映车辆发动机、传动系统和轮胎等的工作状况,直接影响着车辆噪声的排放量;水泥路面作为我国现有路网的重要形式,影响城市噪声的预测和治理。因此,本研究建立针对水泥路面,细分汽车加速、减速、匀速和怠速四种行驶状态的噪声排放计算模型,可以提高机动车噪声预测的准确性,对城区道路的规划和交通噪声的防治有着十分重要的作用和意义。
[1]FHWA-PD-96-010,FHWA traffic noise model technical manual[S].
[2]SUKSAARD T,SUKASEM P,TABUCANON S M,et al.Road traffic noise prediction model in Thailand[J]. Applied Acoustics,1999,58(8):123-130.
[3]JTG B03-2006,公路建设项目环境影响评价规范[S].
[4]李锋,刘济科,蔡铭,等.信号控制对交通噪声的影响分析[J].噪声与振动控制,2010,30(6):109-113. LI Feng,LIU Jike,CAI Ming,et al.Analysis of the effects of signal control on traffic noise[J].Noise and Vibration Control,2010,30(6):109-113.
[5]林郁山,蔡铭,李锋.考虑加速度的交通噪声源强研究[J].应用声学,2012,31(4):282-286. LIN Yushan,CAI Ming,LI Feng.Studies on traffic noise source intensity regard for the acceleration[J].Applied Acoustics,2012,31(4):282-286.
[6]HANSON D I,James R S.Tire/pavment noise study[R]. NCAT,2004,2:13-17.
[7]傅智.水泥混凝土路面舒适性研究[J].公路,2000,45(1):1-4. FU zhi.Comfortableness research of cement concrete pavement[J].Highway,2000,45(1):1-4.
[8]赵剑强,刘春玲.公路交通噪声预测模型探讨[J].应用声学,2005,24(3):147-151. ZHAO Jianqiang,LIU Chunling.Study on highway traffic noise prediction model[J].Applied Acoustics,2005,24(3):147-151.
[9]陶志金.水泥混凝土路面轮胎/路面噪声与交通噪声评价方法研究[D].西安:长安大学,2009.
[10]BERNHARD B,DNEVICH V.Institute for safe,quiet,and durable highways[R].Purdue University Schools of Civil and Mechanical Engineering,2000/2001.
[11]Concrete pavement surface characteristics track.Compare US and European concrete pavements[EB/OL]. http://www.surfacecharacteristies.com/.
[12]交通部公路科学研究院广西壮族自治区交通科学研究所.低噪声水泥混凝土路面研究[R].2007.
[13]GB 1495-2002,汽车加速行驶车外噪声限值及测量方法[S].
[14]张玉芬.道路交通环境工程[M].北京:人民交通出版社,2005:43-44.
[15]MIURA Yasuo,KOJIMA Naoya.Noise generating mechanism at idling for a four-cylinder in-line diesel engine[C]. SAE Paper,2003.
Traffic noise emission model on cement road regard for different driving states
CAI MingXIE LinhuaZHANG Lei
(School of Engineering,Sun Yat-sen University Guangdong Provincial Key Laboratory of Intelligent Transportation System,Guangzhou 510006,China)
The article aimed at establishing a basic noise emission model of the single vehicle,in this research,the A-weight sound press levels of vehicles under different types and driving states including uniform velocity,acceleration,deceleration,and idle state are tested on cement road.The emission model of single vehicle's noise source considering about vehicle type,velocity and acceleration was obtained by applying regression analysis method to testing data fitting.And then this model's data compared with the vehicle's noise source intensity prediction model in specifications for environmental impact assessment of highways(JTG B03-2006)to testify its validity.It is demonstrated that the single vehicle's noise emission model set up by this research predicts more accurate and matches the actual situation better.
Traffic noise,Emission model,Acceleration,Cement road
U491.91
A
1000-310X(2015)02-0175-08
10.11684/j.issn.1000-310X.2015.02.014
2014-05-30收稿;2014-12-30定稿
∗国家自然科学基金项目(51178476)
蔡铭(1977-),男,广东潮州人,教授,研究方向:交通环境工程。
E-mail:caiming@mail.sysu.edu.cn