十七元十字阵水下合作目标远程定位方法
2015-10-28李帅张俊徐国贵
李帅 张俊 徐国贵
(中国人民解放军91388部队 湛江 524022)
十七元十字阵水下合作目标远程定位方法
李帅†张俊徐国贵
(中国人民解放军91388部队湛江524022)
结合水声对抗的实际需求,针对海洋环境下目标定位困难且定位距离有限的问题,利用多水听器十字阵接收信号,并对信号进行加权来提高接收信号信噪比,以达到定位水下合作目标的目的。具体通过波束形成和信号相关,依据目标方位与波束形成方位一致时能量最大的原则,实现对远距离水下合作目标方位和距离的估计,并通过仿真和试验验证了所提定位方法的有效性。
十字阵,波束形成,远程定位
1 引言
水声对抗需要分析并掌握目标运动态势[1-2],但复杂水声环境下目标定位存在一定困难,定位距离有限。传感器阵列与波束形成技术结合因其具有灵活的波束控制、高信号增益、较好的干扰抑制能力与空间分辨能力[3]等优点而在舰船目标探测、水声对抗、故障检测等领域[4]获得广泛应用,一般用于声源定位的阵列有矩形阵、十字阵、环形阵、螺旋阵[3-6]等几种阵形,其中十字阵因其阵形冗余度较小、盲区较小且具有分维特性[4,7-8]而较为适合声源远距离定位。
近年来发表了一系列较少阵元阵列定位的理论和实验研究[4-8];本文在分析十字阵定位原理的基础上,针对水声对抗中遇到的实际问题,重点探索阵元数显著增加情况下十字阵的水声定位效果,实际应用十七元水听器十字阵进行较远距离目标(合作声信号目标)定位方法的探索,并在南海海域进行实际的海上试验验证。
2 算法原理与流程
图1为水平布置十字阵结构示意图,图中ai、bi(i=0,1,2,···,8)为水听器阵元,d1、d2(d1>d2)分别为长轴和短轴阵元间距,T为目标声源,其相对于阵元中心方位角为θ;该十字阵由17个声压水听器组成,实际应用中将十字阵换能器接收到的17路信号在360°水平方向按δ°间隔形成n个波束,并进行目标跟踪,通过接收信号的加权,依据目标方位与波束形成方位一致时能量最大的原则,实现对远距离目标方位及距离的估计,其算法框图如图2所示。波束形成具体方法为:如图1所示,设要在θ角方位上形成波束,声速为c,以十字阵中基元a4(b4)为参考基元,基元ai(i=0,1,2,···,8,i≠4)相对于参考基元的时延为τi,基元bj(j=0,1,2,···,8,j≠4)相对于参考基元的时延为ηj,则有[3]
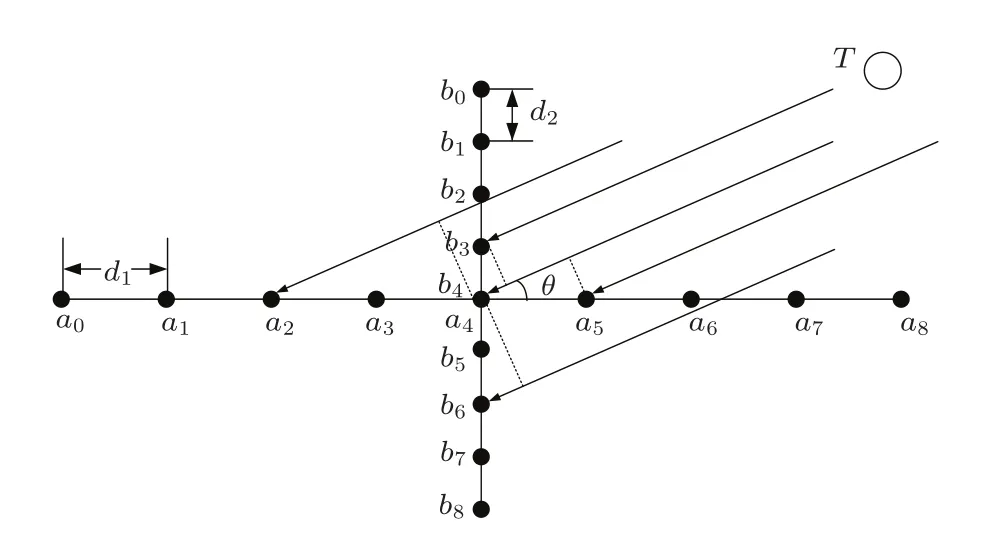
图1 十字阵结构示意图Fig.1 Structure diagram of the cross array
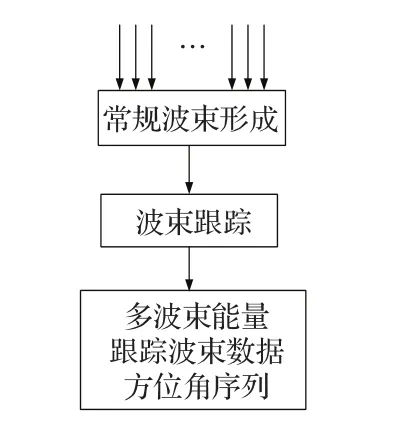
图2 十字阵信号处理框图Fig.2 The block diagram of signal processing

设十字阵长臂第i路信号为ai(k),加权系数为wi,短臂第j路信号为bj(k),加权系数为vi,采用延时相加波束形成,则第m个波束的输出为
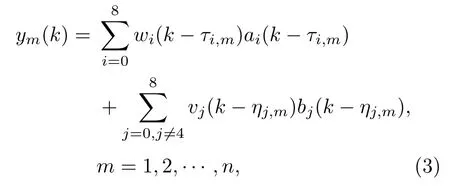

图3 十字阵波束形成算法流程图Fig.3 Flowchart of the beamforming
则y(k)=max(ym(k))(m=1,2,3,···,n)时所对应的θ(k)即为目标方位角序列,最后将y(k)与参考合作声信号做相关,并根据时间统一设备所提供的发射与接收同步时间(同步脉冲)得到对应的相关峰时延,再与声速相乘即可得出距离估计序列,从而实现对目标的定位。
3 仿真计算与分析
如图4所示,设定十字阵中心点为坐标0点,十字阵各单元如图1所示,以短轴为水平轴,水听器间距为0.1 m,长轴为竖轴,水听器间距为0.2 m,以b8号水听器为正北方向,目标在十字阵北偏东45°方向,与十字阵距离为1414 m,声速设为1530 m/s,接收信号信噪比为10 dB。目标发射7 kHz正弦调制的Gold序列信号,通过信道函数仿真计算出十字阵17个单元接收到的信号。以正西方向为0°,顺时针方向进行波束扫描,每2°一个波束,如图5所示,通过常规波束形成,可以计算出目标与正西方向夹角为:69×2=138°。
图4 仿真条件示意图Fig.4 Schematic of the simulation conditions
图5 波束扫描Fig.5 Result of the beamforming
图6 单水听器接收信号与波束形成后信号对比Fig.6 Comparision of received signals between single hydrophone and array output

图7 单水听器拷贝相关与波束形成后拷贝相关对比Fig.7 Comparision of signal-correlation between single hydrophone and array output
图6为单个水听器接收到的信号与十字阵常规波束形成后的信号对比图,图7为单水听器信号拷贝相关与波束形成后信号拷贝相关归一化对比图,图8为十字阵处理增益图。从上述图中可以看出,波束形成后的信号能量明显大于单水听器信号能量,且由于各水听器接收噪声信号相关性小,波束形成后的输出信号信噪比显著增强,接收信噪比-10 dB到10 dB时,阵处理增益可以提高12 dB左右。
图8 十字阵处理的增益Fig.8 Processing gain of the cross array
4 试验验证及分析
试验海区水深106 m,试验由两艘船联合作业来完成,一艘为声源母船,另一艘为十字阵母船,十字阵母船停机漂泊,在船舷吊放十字阵,吊放深度约30 m,声源母船位于十字阵吊放侧约15 km处,以十字阵坐标为基准约120°方向,停机漂泊,声源吊放深度约20 m,采用193 dB源级发射7 kHz正弦调制的Gold序列信号,其中海流等造成的十字阵姿态变化由十字阵内置罗经进行校正。在试验海区共测得声速剖面4条,如图9所示,1至4对应的测量时间分别为09:18、12:35、16:45、18:58。从图9可以看出,第1条剖面为强负梯度剖面,第2~4条在20 m至30 m水层内均出现了较强的跃变层,跃层厚度从5 m至10 m不等,且表层负梯度明显加强,梯度最高达到0.64,水文条件判断为恶劣水文条件。数据处理时,本文暂不探讨非均匀声速剖面时的声速校正问题,计算中根据实验设备布放深度及水文数据取声速为1530 m/s,实测数据按上文所设计的处理方法进行波束形成及相关处理,即可实现对目标的定位,图10即为实测数据处理结果。由结果可以看出,十字阵测距效果较好,与GPS实测数据相对比误差低于2%,而测向误差则大于10°,效果一般。考虑到将来可用3个或3个以上十字阵的测距结果进行球面交汇实现目标定位,而球面交汇解算不需知道单个阵的定位方位,只有接收到信号的十字阵小于3个时,单个十字阵定位方位才真正有价值,其他时候仅供参考,因而定位效果总体来说还是具有一定的参考价值。
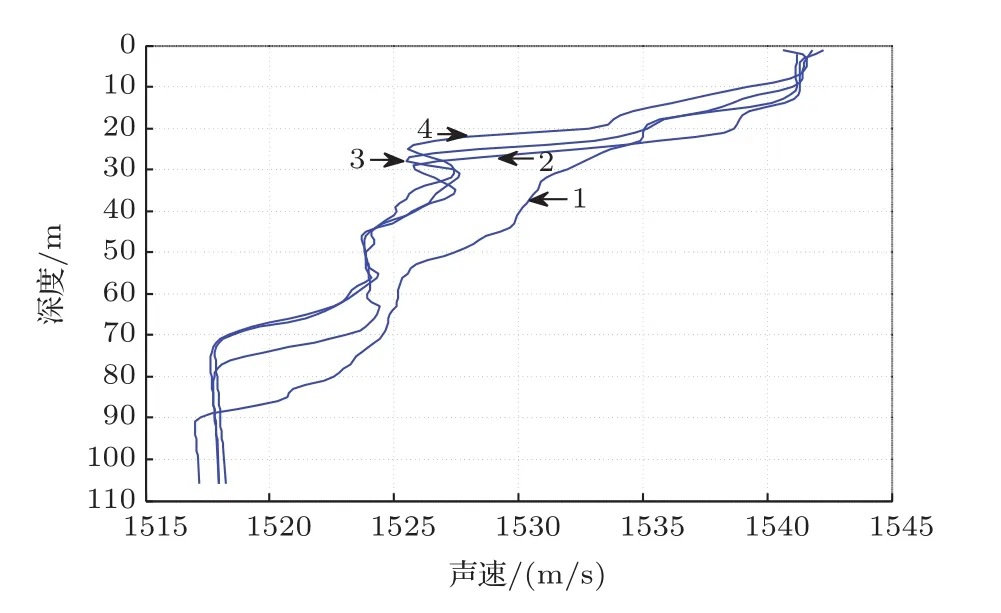
图9 声速剖面Fig.9 Sound speed profile

图10 实测目标定位结果Fig.10 Positioning results of the target
5 结论
本文通过仿真及试验验证,验证了多水听器十字阵远程合作目标定位方法的有效性,虽然测向误差较大,但测距效果良好,考虑到海洋环境的复杂性等一些自然因素的影响,以及海上试验实施方法、十字阵孔径、数据处理方法等方面可能存在的不足及局限性,该方法还有较大的研究空间,如水文条件与吊放深度的关系、十字阵孔径的最优化、非均匀声速剖面时的声速校正及声速选择方式的改善、数据处理方法的改进等,这些方面的研究都有望进一步提高十字阵的定位精度。同时,该方法还具有较好的应用前景,如可采用多十字阵定位的方式(采用球面交汇法解算),既能发挥该方法良好的远程测距功能,又可以克服测向误差较大的不足,从而实现对较大区域内水下目标定位监控,提升水声对抗能力。
[1]施丹华.水声对抗技术发展及其概念拓展[J].舰船电子工程,2004,(1):1-3. SHI Danhua.Progress of underwater acoustic warfare technology and its conceptual extension[J].Ship Electronic Engineering,2004,(1):1-3.
[2]黄玉林,张俊,张学峰,等.潜艇水下定位合作声信号的低截获性分析[J].应用科技,2012,(5):45-47. HUANG Yulin,ZHANG Jun,ZHANG Xuefeng,et al. Low probability of interception analysis on cooperative acoustic signals in submarine underwater localization[J]. Applied Science and Technology,2012,(5):45-47.
[3]王永良,丁前军,李荣峰.自适应阵列处理[M].北京:清华大学出版社,2009.
[4]黄高明,金连友,李志轶.一种新颖的声源被动定位技术研究[J].电子对抗,2009,(2):1-5. HUANG Gaoming,JIN Lianyou,LI Zhiyi.Research of a novel acoustic source passive location technique[J].Electronic Warfare,2009,(2):1-5.
[5]林志斌,徐柏龄.基于传声器阵列的声源定位[J].电声技术,2004,(5):19-23. LIN Zhibin,XU Boling.Sound source localization based on microphone array[J].Audio Engineering,2004,(5):19-23.
[6]陈华伟,赵俊渭,郭业才.五元十字阵被动定位算法及其性能研究[J].探测与控制学报,2003,25(4):11-16. CHEN Huawei,ZHAO Junwei,GUO Yecai.Acoustic passive localization algorithm based on a planar five-element array and its performance analysis[J].Journal of Detection&Control,2003,25(4):11-16.
[7]程萍,陈建峰,马驰,等.十字阵短时宽带声源实时定向算法[J],应用声学,2012,31(2):123-129. CHENG Ping,CHEN Jianfeng,MA Chi,et al.A fast short-time broadband acoustic source direction estimation algorithm using cross array[J].Applied Acoustics,2012,31(2):123-129.
[8]魏丽萍,陈岩,陈庚,等.不等间距非直线三元阵在水声平面声源被动定位中的应用[J],应用声学,2009,28(6):447-453. WEI Liping,CHEN Yan,CHEN Geng,et al.Application of unequally-spaced and non-linear three-hydrophone array in underwater acoustic coplanar target passive localization[J].Applied Acoustics,2009,28(6):447-453.
A remote positioning method of underwater cooperative targets for seventeen-hydrophone cross array
LI ShuaiZHANG JunXU Guogui
(No.91388 Troop of the Chinese People's Liberation Army,Zhanjiang 524022,China)
Taking into account the difficulty of localization and its limited distance in marine environment,a seventeen-hydrophone cross array,which can improve the signal noise ratio of received signals by weighting all the channels,is designed to estimate the position of the underwater cooperative target.According to the principle of maximum energy when the orientation of target and beamforming is consistent,the target position is estimated by beamforming and signal-correlation.Finally,some simulation results and analysis of the method as well as experiment results are presented to verify the validity of the method.
Cross array,Beamforming,Remote position
TB533
A
1000-310X(2015)02-0148-05
10.11684/j.issn.1000-310X.2015.02.009
2014-03-25收稿;2014-10-05定稿
李帅(1986-),男,河南南阳人,硕士,研究方向:信号与信息处理。
E-mail:litianshuai@126.com