扩展拖曳阵宽带频域逆波束形成技术研究
2015-10-28王赞黄勇王朋
王赞 黄勇 王朋
(1中国科学院声学研究所 北京 100190)
(2中国科学院大学 北京 100049)
扩展拖曳阵宽带频域逆波束形成技术研究
王赞1,2黄勇1王朋1,2†
(1中国科学院声学研究所北京100190)
(2中国科学院大学北京100049)
为了提高扩展拖曳阵在低信噪比下对目标的探测性能,本文将基于扩展拖曳阵方法的被动合成孔径技术与宽带频域逆波束形成技术进行了结合,形成了一种新的被动合成孔径测向技术,有效地提高了扩展拖曳阵技术的探测性能,改善了传统基于被动合成孔径测向技术在低信噪比下性能急剧下降的问题,在低信噪比下获得了更高的方位分辨率,同时对于多目标及弱目标检测能力也更为优异。计算机仿真和海试数据的处理都证明了这一算法的良好性能。
被动合成孔径声纳,扩展拖曳阵方法,逆波束形成,弱目标检测
1 引言
随着水声探测技术的发展,线列阵越来越广泛地应用到水下目标探测中,线列阵及舷侧阵的探测性能也受到人们的关注[1-2]。传统的线列阵波束形成技术的方位分辨力受阵列孔径限制,提高线列阵的方位分辨力需增加阵列的物理孔径。为了提高探测距离,拖曳线列阵一般工作在低频段,因此提高其方位分辨力需要更长的阵列。这不仅增加了成本,也对声纳的拖曳系统提出了很高的要求。合成孔径技术可以用小的物理孔径虚拟出大的有效孔径,从而提高方位分辨力,因此合成孔径技术的出现有效的解决了上述孔径不足的问题[3-5]。
被动合成孔径有三种较成熟的算法,Yen和Carey提出的合成方法[3]、 Stergiopoulos和Urban提出的快速傅里叶变换算法(FFTSA)[4],Stergiopoulos和Sullivan提出的ETAM(Extended towed array measurements)算法[5]。R.Rajagopal从方位估计精度、稳健性和计算量等方面将ETAM算法与同类算法进行了综合分析比较,认为其具有最优的性能[6]。此外,还有一系列针对ETAM算法的改进算法[7-11]。传统被动合成孔径测向技术基于常规波束形成(CBF)方法进行方位估计,低信噪比情况下性能急剧下降、多目标检测产生偏差。
20世纪70年代Bucker提出利用阵元接收信号间的互功率谱中存在的方位信息估计平面波功率谱密度,称之为逆波束形成方法(Inverse beamforming,IBF)。20世纪90年代,Wilson和Nuttall等人得到了逆波束形成积分方程的数值解,这个解称之为傅里叶级数解(Fourier series methods,FSM),之后经过进一步的推导得到傅里叶积分方法(Fourier integral method,FIM)[12-13]。与常规波束形成(CBF)相比,逆波束形成技术具有较高的分辨率和噪声抑制能力。
本文将ETAM算法与宽带频域逆波束形成技术进行了有效的结合,形成了一种新型的基于逆波束形成的被动合成孔径算法ETAM-BFIM。计算机仿真结果和海试数据处理结果都表明,ETAMBFIM算法有效地克服了传统的ETAM技术在低信噪比下性能急剧下降的问题,获得了更高的方位分辨率,同时对于多目标和弱目标检测能力也更为优异。
2 ETAM算法
被动合成孔径是一种用时间增益换空间增益的处理方法,即以软件复杂度增加换硬件复杂度减小的方法。如图1,N个阵元组成等距线列阵,阵元间距为d,以速度v做匀速直线运动,假设目标声源静止不动。t时刻第n阵元采样信号表示为xn(t),τ秒后第n阵元采样信号表示为xn(t+τ)。合理选择参数v和τ,可使这段时间内阵的移动距离为vτ=qd,即:t+τ时刻第n阵元和t时刻第n+q阵元在空间上位置重叠。阵采样信号xn(t+τ)和xn+q(t)相差时延τ,对t+τ时刻第n阵元采样信号做一定时延补偿或相位修正(窄带),可以等价得到t时刻第n+q阵元的采样信号,从而虚拟出新的孔径。
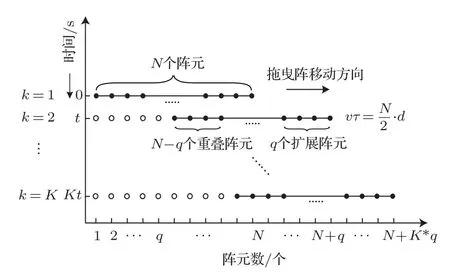
图1 ETAM算法原理图Fig.1 The theory formation of ETAM
这种补偿关系表示为

公式(1)中,Xn(f,t)表示t时刻第n阵元的傅里叶变换,ϕ表示声场起伏、拖曳阵不规则运动等引入的随机误差。记为第k和第k+1个快拍在频点f处的相位修正因子。扩展拖曳阵算法(ETAM)对相位修正因子的估计如下

公式(2)中

重叠阵元的个数q是决定相位修正因子精确性的直接因素,经研究最优重叠阵元数目是N/2。所以,取q=N/2,则每一次的ETAM合成孔径,就可以获得N/2个虚拟阵元。
假设声源辐射信号的频率范围为fmin~fmax,我们对第k+1个快拍数据这一频率范围内的信号分量进行相位补偿,可以虚拟得到第k快拍时N+1~N+N/2阵元的频域快拍信号,完成被动合成孔径过程。重复以上过程L次,可以获得N+NL/2个阵元的虚拟孔径。
被动合成孔径要求接收阵的接收信号的空间相关性大于合成孔径的积分长度,在相邻两次测量当中信号的时间相关性也能满足相关因子求解的要求。对声源信号时间、空间相关性的理论和试验研究表明,对匀速运动的线列阵进行孔径合成,水声信号的时空相关性是足够的[8]。
3 扩展拖曳阵宽带频域逆波束形成
3.1逆波束形成技术
设N(f,θ,φ)为频率为f,入射方位为(θ,φ)的信号功率谱密度,其中θ和φ分别为水平方位角和俯仰角。对于阵元数为M,阵元间距为d的均匀线列阵,定义任意两阵元的互功率谱为Gk,j(f),1 6 k,j 6 M。则两阵元的互谱可表示为
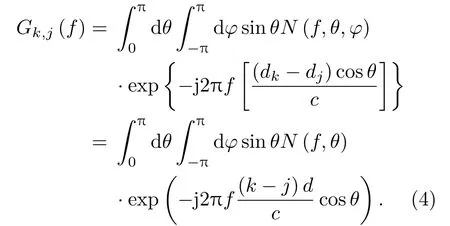
公式(4)中, dθdϕsinθN(f,θ,ϕ)表示立体角dθdφsinθ内的功率谱密度,τk,j(θ,φ)为第k,j号阵元接收信号相对参考阵元的延迟。公式(4)把阵元互谱Gk,j(f)和声场的功率谱密度N(f,θ,φ)联系在了一起,通过阵元实测数据提取阵元互谱,求解公式(4)得到N(f,θ,φ),即可获得声源方位信息,这是逆波束形成技术的基本原理。令u=cosθ,则
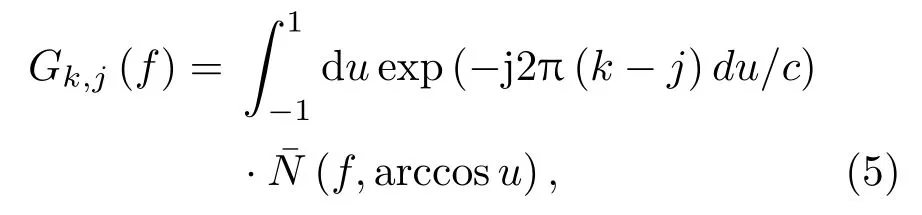
公式(5)中,

从上式可知,互谱矩阵中具有相同k-j值的元素含有相同的目标方位信息,因此可令C(p)=C(k-j)=Gk,j(f),则
对公式(6)两边同时做关于p的傅里叶变换并化简可得
公式(7)中

为协方差矩阵的Toeplitz平均。
从公式(7)可以看出,由于在互谱域进行波束形成,阵元数相当于扩展到了2M-1,阵长增加了一倍,所以IBF的主瓣宽度约为CBF的2/3,阵增益提高了约3 dB。
3.2ETAM-BFIM方法
基于ETAM方法的宽带逆波束形成(ETAMBFIM),是将用宽带ETAM算法合成后的频域数据直接用宽带逆波束形成技术进行方位谱估计,得到目标空间方位谱。这种结合既利用了ETAM带来的阵增益,又利用了逆波束形成低信噪比下性能良好的特点。
设信号频率范围为fmin~fmax,某一时刻用宽带ETAM进行L次孔径扩展,得到N+NL/2个阵元的频域快拍信号

在频率fi下M=N+NL/2个阵元的协方差矩阵为
由公式(10)代入公式(7)和公式(8)求得单个频点的FIM空间方位谱PFIM(θ,fi)。最后对所有频点进行叠加可得到宽带逆波束形成的结果为

4 算法性能分析
4.1仿真测试
仿真条件:为了分析ETAM与宽带逆波束形成结合后的性能,对本文方法与ETAM和时域平均ETAM[11]进行了对比。仿真采用带限白噪声模拟水下宽带信号,频率范围100~500 Hz,信号源保持静止;阵元数为32,阵元间隔1.5 m,重叠阵元数为16,合成次数5次,合成阵元个数192个。
4.1.1单目标低信噪比
仿真信号源方位为70°,带限白噪声与信号等带宽,阵元处信噪比SNR=0 dB、-20 dB时,本文方法、传统ETAM测向和时域平均ETAM测向的空间方位谱分别如图2、图3所示。
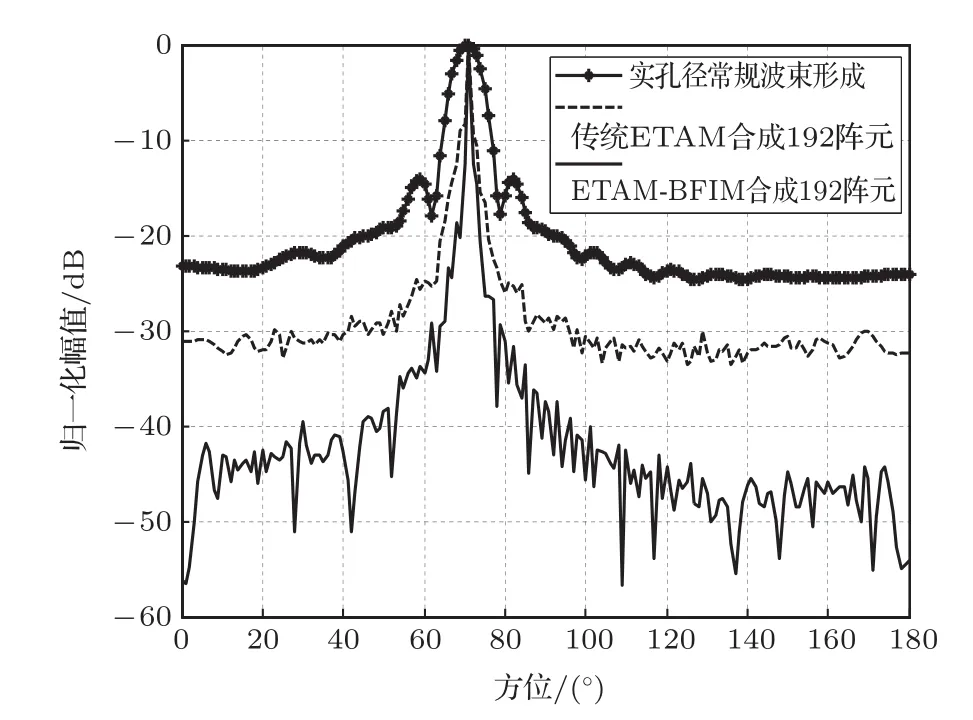
图2 SNR=0 dB下ETAM-BFIM方位估计情况Fig.2 The DOA estimation of ETAM-BFIM with SNR=0 dB
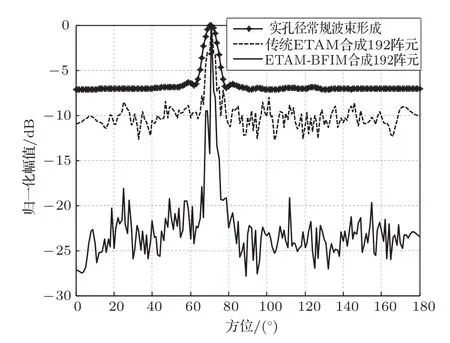
图3 SNR=-20 dB下ETAM-BFIM方位估计情况Fig.3The DOA estimation of ETAM-BFIM with SNR=-20 dB
从图2、图3可以看出,本文提出的ETAMBFIM方法可以获得更高的分辨率和更低的旁瓣级,在低信噪比情况下(图3所示)ETAM-BFIM方法有着较为明显的优势,这有利于在高环境噪声下对弱目标进行探测。
4.1.2多目标分辨力
本文提出的方法不仅对单目标信号的方位估计效果有明显优势,对于多目标信号的估计也有一定的优势,如图4所示是对目标方位为70°、75°,信噪比SNR=0 dB情况下估计结果;图5所示是对目标方位为70°、72°,信噪比SNR=0 dB情况下估计结果。
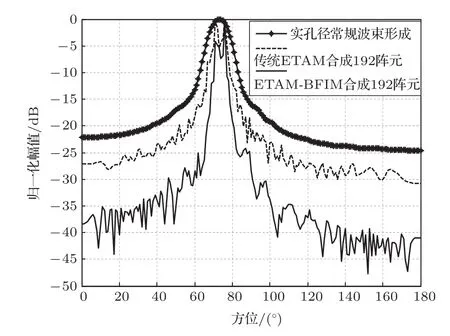
图4 ETAM-BFIM多目标方位估计(70°、75°)Fig.4 The multi-source DOA estimation of ETAM-BFIM(70°,75°)
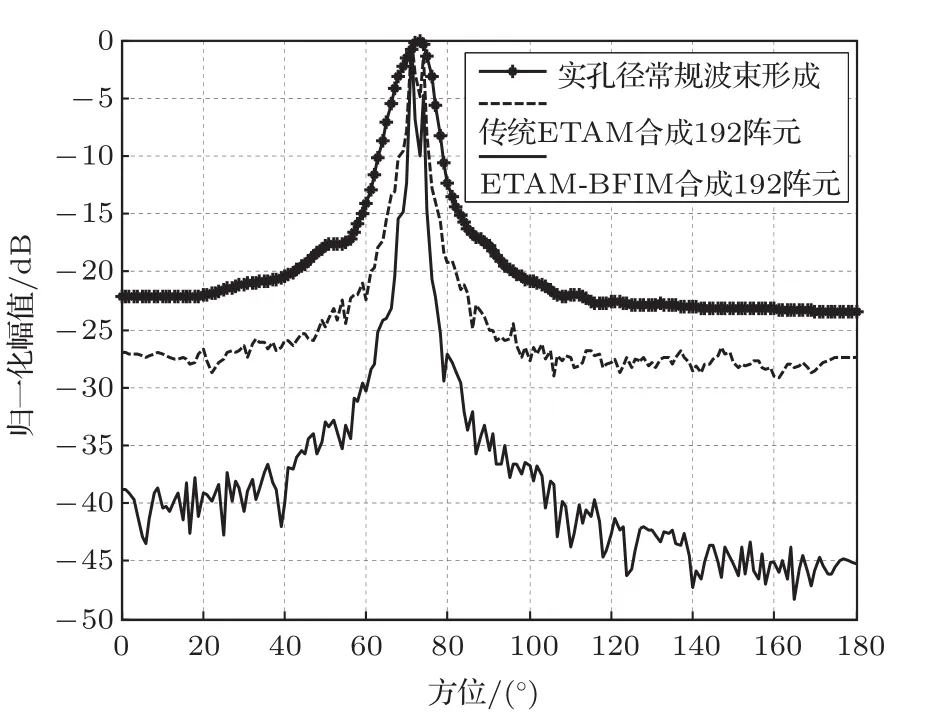
图5 ETAM-BFIM多目标方位估计(70°、72°)Fig.5 The multi-source DOA estimation of ETAM-BFIM(70°,72°)
从图4可以看出,ETAM-BFIM方法和时域平均ETAM方法都可以分辨出70°、75°两个方位的目标,但ETAM-BFIM方法的分辨效果优于后者;图5显示ETAM-BFIM方法可以分辨出70°、72°两个方位的目标,而作为对比的时域平均ETAM方法分辨不出相差两度的两个目标。
4.2海试数据验证
试验参数:拖曳阵水听器数目M=40,水听器间距d=1 m;拖曳阵做匀速直线运动,速度v=3.2 m/s,信号采样率fs=2000 Hz。目标信号频带范围:20~700 Hz,声速c=1516 m/s,快拍长度N=2048。通过估算,海试实验信号的信噪比约为0 dB。需要注意的是:数据长度越长,数据矩阵维数越大,运算速度会相应减慢。为了保证运算速度能够满足实时处理的要求,数据快拍长度不宜过大。一般FFT运算点数在2048点及以下均能满足要求。
图6对比了实孔径、 时域平均ETAM和ETAM-BFIM海试实验数据的波束输出结果。从图中可以看出,本文提出的方法(ETAM-BFIM),波束宽度较窄,并且旁瓣级明显较低,具有较高的分辨率和信噪比增益。同时,从图中也可以看到本文方法给出的旁瓣波动较大,这也是逆波束形成技术所具有的问题,可以通过加窗来抑制旁瓣的波动,但这在一定程度上会增大ETAM-BFIM方法的主瓣宽度,图7为加窗后的结果。
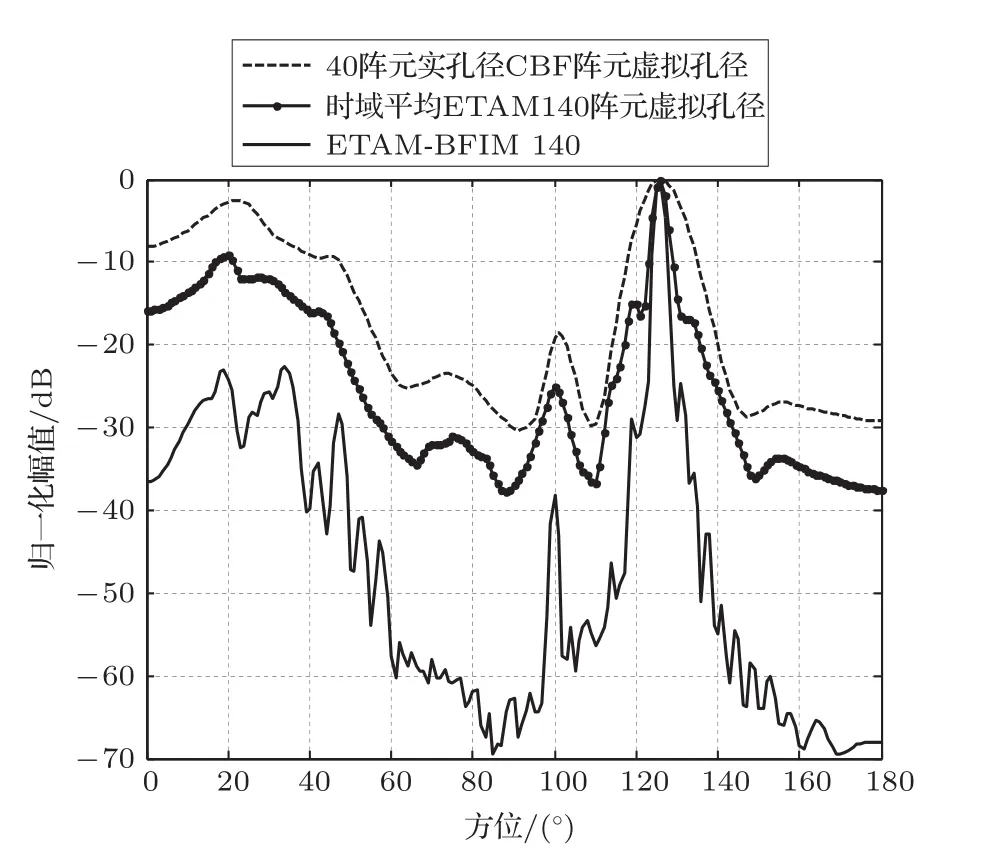
图6 ETAM-BFIM海试数据方位估计情况Fig.6 The DOA estimation of ETAM-BFIM with sea trial data
图8(a)是对40阵元传统ETAM方法合成140阵元做频域宽带波束形成的方位历程图,图8(b)是时域平均ETAM方法合成140阵元孔径宽带波束形成的方位历程图,图8(c)是采用ETAM-BFIM算法合成140个阵元得到的海试数据方位历程图。从图中可以看出,ETAM-BFIM算法的方位分辨率优于另两种方法,且旁瓣较低。
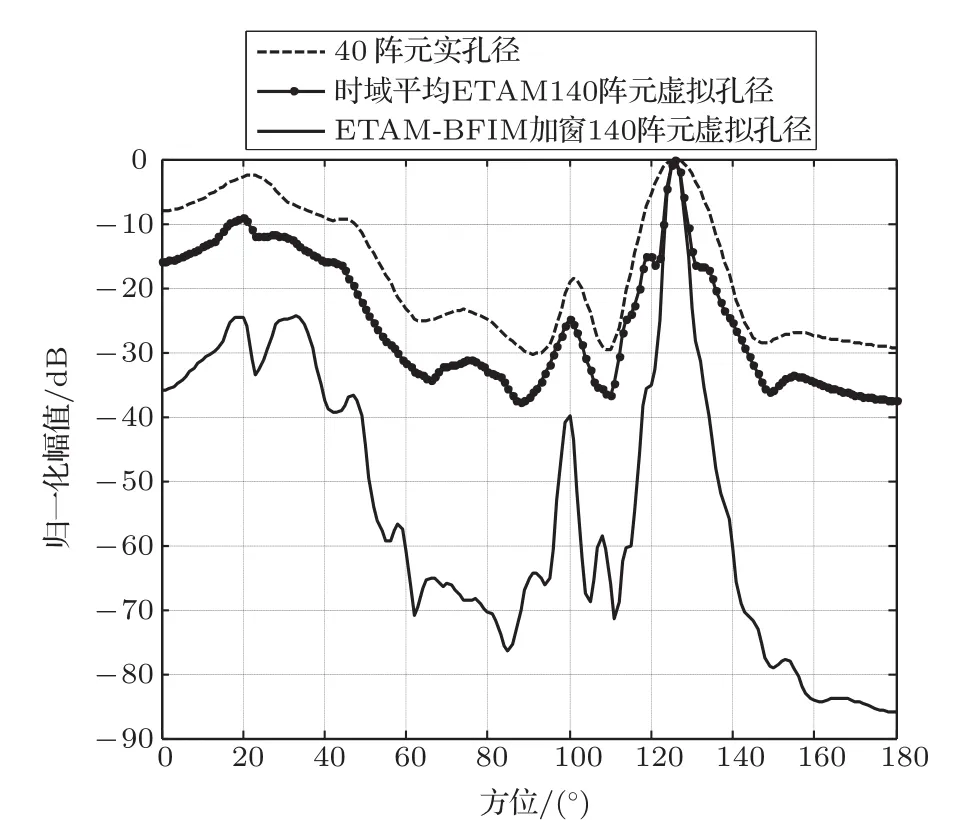
图7 ETAM-BFIM海试数据加窗后的方位估计情况Fig.7 The DOA estimation of ETAM-BFIM added windows with sea trial data
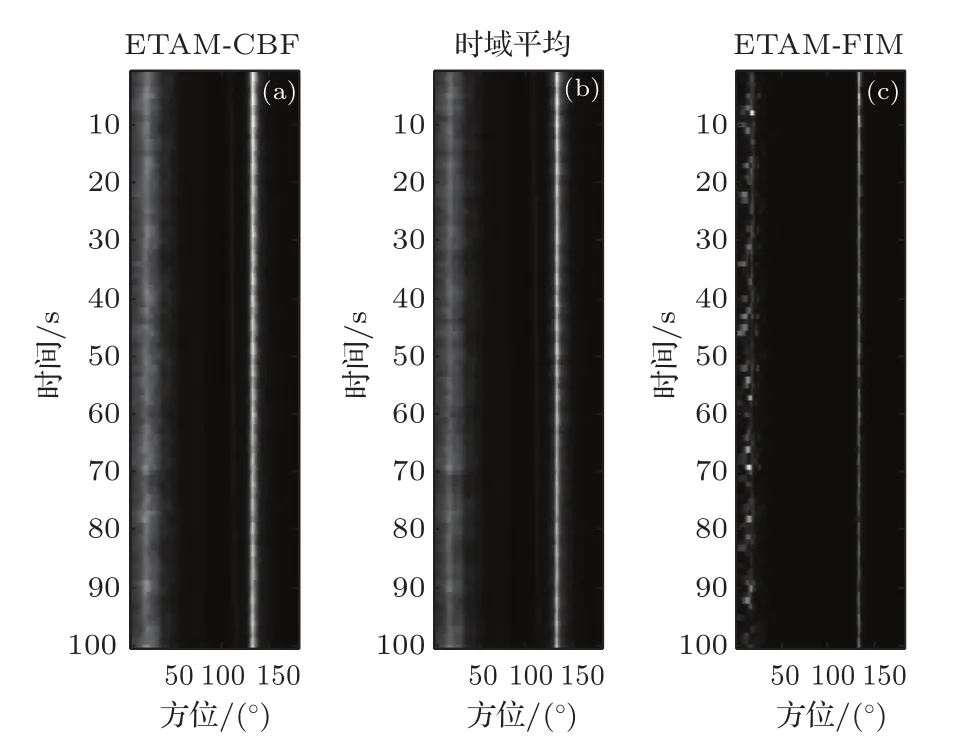
图8 传统ETAM、时域平均ETAM、ETAMBFIM方位历程图Fig.8 The bearing-time-record of traditional ETAM,temporal domain ETAM and ETAMBFIM
5 结论
宽带频域逆波束形成方法与ETAM方法有效的结合,形成了一种新的基于ETAM被动合成孔径技术的宽带频域逆波束形成方法。计算机仿真和海试数据处理都表明,这种方法在低信噪比下较传统被动合成孔径测向技术有明显优势,并且该方法对多目标分辨性能也有一定的提高。
[1]LI Bo,SUN Chao.An array extension method in a noisy environment[J].Journal of Marine Science and Application,2011,10(2):226-232.
[2]HOU Yunshan,HUANG Jianguo,JIANG Min,et al. Application of linear prediction technique to passive synthetic aperture processing[C].EURASIP Journal on Advance in Signal Processing,2010.
[3]YEN N C,CAREY W.Application of synthetic-aperture processing to towed-array data[J].J.Acoust.Soc.Am.,1989,86(2):754-765.
[4]STERGIOPOULOS S,URBAN H.A new passive synthetic aperture technique for towed arrays[J].IEEE Journal of Oceanic Engineering,1992,17(1):16-25.
[5]STERGIOPOULOS S,SULLIVAN E J.Extended towed array processing by an overlap correlator[J].J.Acoust. Soc.Am.,1989,86(1):158-171.
[6]RAJAGOPAL R,RAO P R.Performance comparison of PASA beaming algorithms[C].IEEE International Symposium on Signal Processing and its Applications,Austrilia,1996:825-828.
[7]TONG P B,LIM H S,CHIA C S,et al.Extended towed array measurement:Beam-domain phase estimation and coherent summation[C].IEEE,Singapore,2006:1-6.
[8]KIM S,YOUN D H,LEE C.Temporal domain processing for a synthetic aperture array[J].IEEE Journal of Oceanic Engineering,2002,27(2):322-327.
[9]LI Zheng,HUANG Yong,HUANG Haining.Study of efficient broadband beamforming based on extended towed array measurement[C].Proceedings of 2010 IEEE Youth Conference on Information,Computing and Telecommunications(YC-ICT 2010),Beijing,2010:323-326.
[10]ZENG Xiongfei,LI Zheng,HUANG Yong,et al.Focused passive synthetic aperture[C].Proceedings of 2010 IEEE Youth Conference on Information,Computing and Telecommunications(YC-ICT 2010),Beijing,2010:158-161.
[11]KIM S,YOUN D H,LEE C.Temporal domain processing for a synthetic aperture array[J].IEEE Journal of Oceanic Engineering,2002,27(2):322-327.
[12]YANG T C.Measurements of temporal coherence of sound transmissions through shallow water[J].J.Acoust.Soc. Am.,2006,120(5):2595-2614.
[13]NUTTAL A H,WILSON J H.Estimation of the acoustic field directionality by use a planar and volumetric arrays via the Fourier series method and the Fourier integral method[J].J.Acoust.Soc.Am.,1991,90(4):2004-2019.
Wideband inverse beamforming technique with extended towed array
WANG Zan1,2HUANG Yong1WANG Peng1,2
(1 Institute of Acoustics,Chinese Academy of Sciences,Beijing 100190,China)
(2 University of Chinese Academy of Sciences,Beijing 100049,China)
In order to improve the detection of the extended towed array method for the target in relatively low SNR environment.The passive synthetic aperture technology based on extended towed array method and broadband inverse beamforming method in frequency domain was combined together.It forms a new efficient direct-finding method based on passive synthetic array technology.This method improves the detection performance of extended towed array method effectively,and the problem of bearing resolution dramatic degradation for the traditional passive synthetic aperture technology in relatively low SNR environment.The azimuth resolution of this method is higher than that of the conventional beamforming,and the detection ability of the multi-target and weak target is more excellent than traditional extended towed array method(ETAM)The performance of this new algorithm has been demonstrated by both computer simulation and sea trial data.
Passive synthetic array sonar,ETAM,Inverse beamforming,Weak target detection
TP3
A
1000-310X(2015)02-0142-06
10.11684/j.issn.1000-310X.2015.02.008
2014-02-19收稿;2014-05-22
王赞(1990-),男,河南南阳人,硕士研究生,研究方向:信号与信息处理。
E-mail:wangpeng110@mails.gucas.ac.cn