起升高度限制器试验台的研制
2015-10-16金郁沁
金郁沁,刘 艺
(上海船舶设备研究所,上海 200031)
起升高度限制器试验台的研制
金郁沁,刘 艺
(上海船舶设备研究所,上海 200031)
本实验台根据起升高度限制器的工作原理,模拟在起重机实际工况下,对起升高度限制器的性能进行了测试。试验台可对起升高度限制器的运转限位功能和重复定位精度进行测试,可用于各类型起重机起升高度限制器的运转限位功能试验和重复定位精度试验。
起升高度限制器;转角精度;试验台
0 引言
起升高度限制器是用于限制起重机吊起升高度的重要安全保护装置,其作用是当吊具上升或下降至极限位置时,自动切断起升的动力源,卷筒停止转动,使吊具不再继续升高,避免吊具与横梁(臂架)相撞,保证钢丝绳在卷筒上的缠绕圈数不少于设计规定的周数。近几年来,随着起重机向着大型化,高效化,成套化的方向发展,对起重机安全保护装置的安全要求越来越高,尤其应特别关注起升高度限制器的动作可靠性。为了保证起升高度限制器的性能,国家制定了《GB 12602起重机械超载保护装置安全技术规范》、《TSG Q7014-2008起重机械安全保护装置型式试验细则》等规范标准,其中规定了起升高度限制器动作性能的试验方法。研制的起升高度限制试验台就是基于这些标准设计的,本试验台模拟起重机运行时卷筒的实际工况,可对重锤式、螺杆式以及蜗轮蜗杆式起升高度限制器进行运动限位功能和凸轮转角重复定位精度的实验。
1 起升高度限制器试验台的结构
1.1 组成
本起重机起升高度限位器试验台主要由机架、伺服电机、编码器、行星式减速器、十字滑块联轴器、卷筒、计算机测试及控制系统等组成。本试验台的电机选用伺服电机,以满足不同转速情况下的测量,且比直流电机速度响应频率高,具有高速定位和闭环控制功能,大大提高了测试系统的精度。为了减少制动时整机产生的振动,采用了十字滑块联轴器,在支架底座与地基接触处垫有橡胶隔振板。卷筒上绕出的绳索通过滑轮组来升降重物,其工况与起重机的实际工况相符。因伺服电机输出轴转速高,惯性力矩比较小,需选用质量在15kg内的重物模拟实际工况。卷筒与减速器之间采用十字滑块联轴器联接,使卷筒轴的受力情况得到了改善,并保证了测量精度。
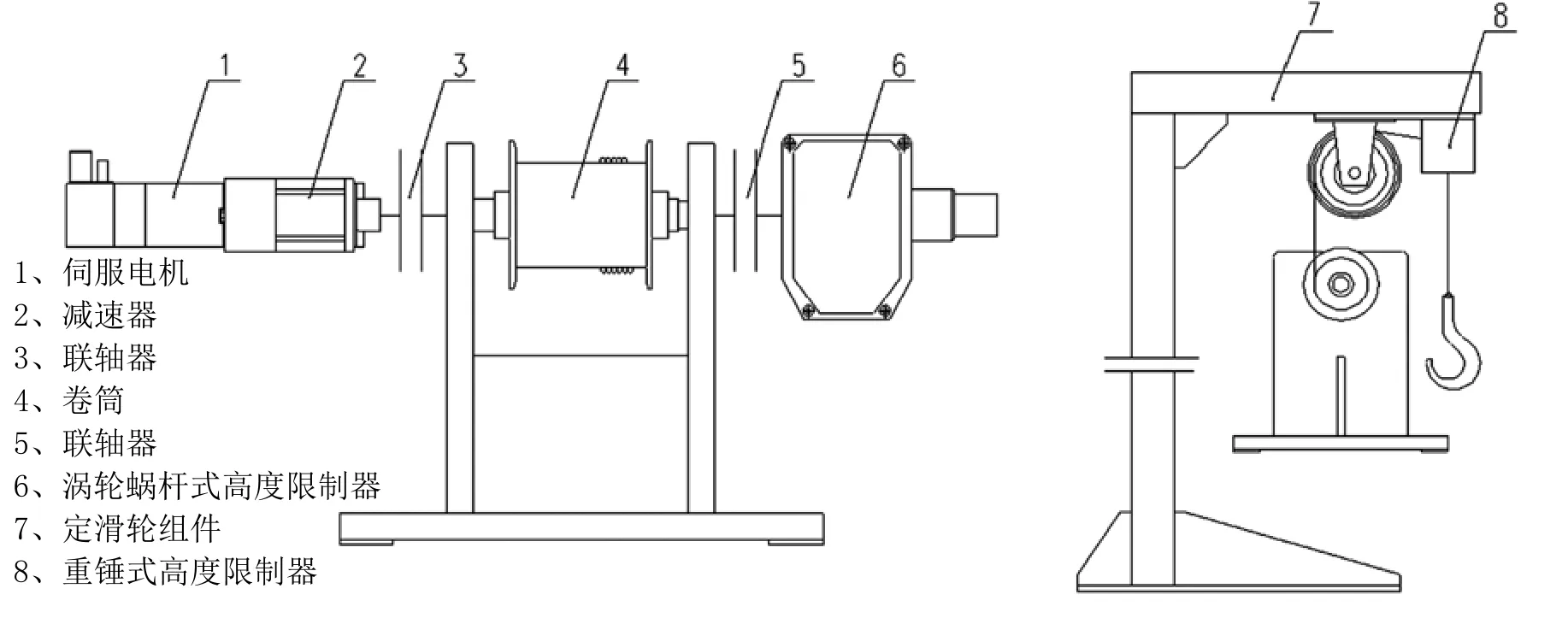
图1 起升高度限制器实验台
1.2 试验台的性能参数和精度
1)伺服电机:功率P=0.2kW,转速S=3000r/min,最大转矩Mmax=1.91N.m;2)行星减速器:连续出力转矩M=19.6N·m,减速比i=70;3)起升高度限制器:传动比i=80,动作组数n=4,工作电压:U=AC220/380V;4)凸轮转角测量精度:±0.1%FS,显示精度:2位小数。
2 起升高度限位器测试原理及实验方法
2.1 起升高度限位器测试原理
系统的主要测试原理是根据起升高度限位器的传动比,动作组数,调整试验台与之相匹配,然后模拟起升高度限位器的运行状况。当起升高度限位器在工作循环中反复动作时, 对反映起升高度限位器性能的主要参数进行测量,采集到一段时间内的脉冲信号,再通过计算机进行数据处理与分析,从而完成对起升高度限位器的质量检测。
2.2 实验内容
伺服电机带动卷筒转动并传递转矩,编码器自动记录电机的转速,并把转矩传递给起升高度限位器。当电机运转相应的转数时,起升高度限位器的记忆凸轮或碰块就会触碰微动开关发出相应的行程限位报警和极限限位报警并切断电源。编码器所显示电机转速的对应距离与起身高度限位器所显示的起升高度相比较可反应限位器的高度显示精度。电动机反转时,凸轮或碰块与微动开关脱离接触且返回正常工作状态时,微动开关应能自动复位,凸轮或碰块反转至初始位置停止。反复以上实验过程3次,通过编码器输出的脉冲数进行转换并计算出升高限制器的转角重复定位精度。
3 试验台测试系统
3.1 伺服控制系统
伺服控制系统主要由伺服电机、伺服驱动放大器、PLC、PLC特殊功能模块、计算机和电气控制柜组成,如图2所示。

图2 伺服控制系统组成
3.1.1 伺服电机
伺服电机比步进电机有更好的控制精度和速度响应性能,伺服电机的控制精度由电机轴后端的旋转编码器保证,每旋转一个角度,都会发出对应数量的脉冲,这和接受的脉冲形成了呼应,这样系统就会知道发了多少脉冲给伺服电机,同时又收了多少脉冲回来,就能很精确的控制电机的转动,从而实现精确的定位。MR-E系列的伺服电机编码器带有10000脉冲/转分辨率的增量型位置编码器,在本系统中可对凸轮或碰块的位置进行准确的控制。
3.1.2 伺服驱动放大器
伺服驱动放大器可直接对电机编码器反馈信号进行采样,内部构成位置环和速度环,一般不会出现步进电机的丢步或过冲的现象,控制性能比步进电机更为可靠。本系统中伺服驱动放大器为三菱的MR-E-40A,是高性能的伺服系列,控制模式有位置控制和速度控制两种模式,并能切换位置控制和速度控制模式进行运行。适合用于设备的高密度定位和平稳的速度控制。在本系统测试过程中,主要用到的是位置控制模式,MR-E-40A与三菱的脉冲发生单元FX2N-1PG接口良好,可从FX2N-1PG接收脉冲并根据脉冲数控制伺服电机的启停和运转方向。伺服驱动放大器与PLC特殊功能模块的连接电缆必须采用屏蔽电缆,屏蔽层要可靠接地,并且要计算屏蔽电缆的长度,以保证脉冲信号的正确传输。
3.1.3 PLC和PLC特殊功能模块
在本系统中,PLC为三菱的FX2N,该PLC有较高的可靠性,丰富的指令和较强的实时通讯能力,还有丰富的可以与其匹配的扩展模块。PLC特殊功能模块为FX2N-1PG和FX2N-1HC。FX2N-1PG为脉冲发生单元,可通过向伺服电机的驱动放大器提供指定数量的脉冲来实现伺服电机的精确定位。FX2N-1PG接收PLC的指令,分别从FP和RP端发出正转和反转的脉冲,伺服驱动放大器的PP和NP端和FX2N-1PG的FP和RP端相连,接收到脉冲后根据放大器的设置值直接驱动伺服电机运行。在本系统中为1800脉冲/转。FX2N-1HC是硬件高速计数模块,有2相50HZ的高速计数器,计数速度比PLC的内置高速计数器的计数速度高,而且可直接进行比较和输出。确保高速计数器的计数能力才能保证PLC程序的正常工作,读取到正确的编码器脉冲输出信号。伺服驱动放大器的 LA和LAR、LB和LBR、LZ和LZR端分别为编码器的A相、B相和Z相脉冲的差动驱动输出,将它们与FX2N-1HC的A24+和A-、B24+和B-、XP24和COMP端相连,FX2N-1HC就能读取伺服电机编码器通过驱动放大器输出的反馈脉冲信号,计算出伺服电机旋转过的角度,并与预先设定的值进行比较。在本系统中伺服电机编码器的输出为4000脉冲/转。
3.1.4 计算机和电气控制柜
PLC通过232-BD接口板与计算机的232口进行通讯,计算机能读取PLC所有的输出和内部设置值,如FX2N-1PG输出的脉冲值和FX2N-1HC读取到的编码器反馈脉冲值等,并进行一系列的计算,再将计算结果显示在屏幕上,使试验过程更为直观。电气控制柜中除了安装系统主要的组成部分外,还有断路器、稳压电源、保险丝、接线端子和操作按钮、急停按钮等,可为实验过程中提供安全稳定的电源、必要的保护和紧急停止装置。
3.2 计算机软件
本系统中的计算机软件采用了模块化的设计方法,专门开发了一套起升高度限制器实验台测试系统软件。基于计算机系统的测试软件在数据处理、显示、存储等各方面都比传统的仪器仪表功能强大,新一代的起升高度限制器试验台试验流程的控制,试验数据的采集、计算、存储等功能都由计算机软件来实现。用户可通过在计算机程序设计的界面上进行参数输入,开始试验和结束试验等操作,由计算机软件自动进行数据处理、存储和试验结果显示等工作,并最后生成试验报告。测试系统软件流程如图3所示。
4 数据处理方法
对于起升高度限制器转角定位精度的测量。本系统采用伺服电机的编码器。测试控制系统能实时测量凸轮转角重复定位精度,伺服电机输出的脉冲数于其转速成正比,计算机得到的信号是PLC通过高速计数器采集到的伺服驱动放大器输出的编码器脉冲信号。通过调整设置值可改变电机的转速和伺服电机每转输出的脉冲数(输出脉冲=设定值[脉冲数/转])。起升高度限位器的凸轮触碰到微动开关发出相应的极限限位报警并切断电源后,计算机将采集到的信号转换为角度输出。角度计算公式为:


图3 测试系统软件流程图
式中,X为计算机采集到的脉冲数;Y为伺服电机编码器的输出脉冲;i为起升高度限制器的传动比,即电机转角与起升高度限制器凸轮转角比。由于考虑到本系统中存在系统误差和单次测量的误差,因此该测量结果需进行修正,修正的公式为:

式中,为三次测量的平均值;Δ*X为系统误差;δx为标准误差,此处δx=±1%Fs。
若时间间隔较短,则采集到的脉冲数少,精度较低。反之,采集到的数据多,显示的精度提高,但虚拟仪表的刷新速度就会变慢。为了既保证精度,同时又使虚拟仪表保持较快的刷新速度,就要根据转速信号的特点来选择合适的时间间隔。经反复试验,选取了100ms的时间间隔,测试精度和虚拟角度仪表的分辨力都能满足系统要求。
实验结果输出:
经过对QGX-B型起升高度限制器的测试,结果表明,多次试验均满足规范标准内对起升高度限制器动作性能的试验要求,该型号起升高度限制器的运动限位功能和凸轮转角重复定位精度的多次试验结果均为合格。试验结果见图4。

图4 试验结果
5 结语
本文介绍了起升高度限制器试验台的研制过程,该实验台可较好模拟起重机的实际工作情况,对各种螺杆式、重锤式、涡轮蜗杆式起升高度限制器均可进行测试。实验台的结构设计可满足测试起升高度限制器性能的工作要求,且该试验系统建立了良好的人机交流界面,可完成对数据的采集、分析处理和状态监控等工作,这突破了传统仪器仪表在数据传送、处理显示和存储功能等方面的限制,实际使用效果好,这为起升高度限制器的安全监察提供了可靠的实验设备。
[1]TSG Q7014-2008起重机械安全保护装置型式试验细则.特种设备安全技术规范,2008.
[2]尤建阳,侯振亚,刘凯.起升高度限制器的技术与管理现状[J].起重运输机械,2005(10):49-51.
[3]黄漫国,陶元芳,起重机制动器试验台检测系统软件设计[J].计算机技术与应用,2007,27(2):52-54.
[4]朱钰,许顺隆,刘少辉,等.液压起重机安全监控系统的开发[J].武汉理工大学学报,2008,4(8):67-69.
Development of Lifting Height Limiter Test Bed
JIN Yu-qin,LIU Yi
(Shanghai Marine Equipment Research Institute,Shanghai 200031,China)
According to the operation principle of lifting height limiter,the test bed simulates the crane actual working condition and tests the lifting height limiter performance.The test bed can test the limiting function and repeat positioning accuracy of lifting height limiter.It can also be used in different types of crane lifting height limiter.
lifting height limiter; rotation angle accuracy; test bed
TH16
A
10.16443/j.cnki.31-1420.2015.04.011
金郁沁(1977-),女,工程师,长期从事物流输送系统以及非标设备的电气设计、开发与研究。
