并联型有源电力滤波器(PAPF)的设计与仿真研究
2015-10-16刘勇
刘 勇
(海军驻上海江南造船(集团)有限责任公司军事代表室,上海 201913)
并联型有源电力滤波器(PAPF)的设计与仿真研究
刘 勇
(海军驻上海江南造船(集团)有限责任公司军事代表室,上海 201913)
本文采用基于瞬时无功理论的谐波电流检测方法的 d-q法进行谐波电流检测。为提高系统性能,引进了基于内模原理的重复控制策略,并采用重复控制和PI控制相结合的复合控制方式。最后,利用Matlab/Simulink仿真平台搭建了相应的仿真模型并进行仿真研究。
并联型有源电力滤波器;重复控制;PI控制
0 引言
随着电力电子技术的飞速发展,越来越多的电力电子装置接入电网。一方面电力电子设备的大量使用和非线性负载的不断增加向电网注入大量的谐波及无功电流,极大的恶化了电网电能质量;另一方面这些电力电子设备和各种负载正常、稳定以及高效的运行则需要电网提供高效优质的电能质量。电力系统的谐波含量是衡量电能质量的一项重要指标。因此,对电网进行谐波抑制以及无功补偿,提高电网的电能质量的各方面研究越来越受到关注。
装设谐波补偿装置的传统方法就是采用LC无源滤波器。这种方法既可补偿谐波,又可补偿无功功率,而且结构简单,一直被广泛使用。其主要缺点是补偿特性受电网阻抗和运行状态的影响,容易和系统发生并联谐振,导致谐波放大,使 LC滤波器过载甚至烧毁。此外,它只能补偿固定频率的谐波。
而目前谐波抑制的一个重要趋势是采用有源电力滤波器(Active Power Filer,APF)。APF是一种能够动态抑制谐波和补偿无功的新型电力电子装置。与无源滤波器相比,它具有更优越的谐波抑制效果,可以对频率和幅值都变化的谐波进行实时跟踪补偿,且补偿特性不受电网阻抗的影响,具有高可控性和良好的动态响应速度。因此广受关注,并出现了众多的电路拓扑结构和控制方案。
1 有源电力滤波器的基本原理
根据接入电网的方式不同,APF可以分为并联型有源电力滤波器(Parallel Active Power Filter,PAPF)、串联型有源电力滤波器(Series Active Power Filter,SAPF)和串并联型有源电力滤波器三类。后者又称统一电能质量调节器(Unified Power Quality Conditioner,UPQC)。本文研究的是应用于三相三线制系统中的PAPF。
PAPF系统主要包含两个部分,谐波电流检测电路和谐波电流发生电路。其中,谐波电流检测电路的作用是检测出非线性负载中的谐波电流分量,谐波电流发生电路根据检测所得的谐波电流产生非线性负载所需的谐波电流分量,其具体结构如图1所示。

图1 并联型有源电力滤波器系统结构
图中,iL为非线性负载电流,包括基波分量iLf和谐波分量iLh两部分。谐波电流检测电路从负载电流iL中提取出谐波电流分量iLh并将其作为补偿电流的指令信号iC*,在电流跟踪控制电路的作用下,使PAPF输出的补偿电流iC跟踪iC*,从而使其与负载电流的谐波分量iLh相等,这样电源电流iS中只含有负载基波电流iLf,不含谐波分量。这样就达到了滤除电源电流中谐波的目的。
从上述分析中可以看出,APF的工作性能很大程度上取决于对负载电流中谐波电流的准确、实时检测。由于谐波电流的变化率高,因此APF的电流控制器需具有快的动态响应速度和高的控制精度,同时还需保证系统具有良好的稳定性。
本文采用的PAPF主电路拓扑如图2所示,应用于三相三线制系统中。该拓扑基于电压源型逆变器(Voltage Source Inverter,VSI),采用单电感滤波的形式,以电感滤波型不控整流电路作为谐波电流源。
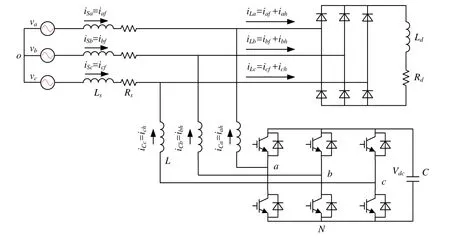
图2 PAPF主电路拓扑
选取直流电压Vdc=1000V,开关频率fs=10kHz,选取滤波电感L=6mH。不控整流电路的负载电感Ld=1mH,电阻Rd=72Ω。
2 控制系统设计
2.1 谐波电流检测
基于瞬时无功功率理论的谐波电流检测方法是目前APF中应用最为广泛的方法,瞬时无功功率理论由日本学者H.Akagi于1984年提出的,它以瞬时实功P和瞬时虚功Q的定义为基础,即PQ理论。基于PQ理论的检测方法要求电压信号为无畸变的正弦,而实际的电网电压存在畸变,因此其检测结果误差较大。基于此,许多学者提出了相关改进方法,例如ip-iq法和d-q法。即使电压发生畸变,采用这两种改进方法仍然能够正确地检测出谐波电流。本文采用d-q法进行谐波电流检测,d-q法原理图如图3所示。

图3 d-q法原理图
谐波检测中LPF为二阶Butterworth低通滤波器,其截止频率fc=20Hz,品质因素Q=0.707。
2.2 电流跟踪控制
图4为控制系统传递函数模型。其中,Gc为控制器传递函数,KPWM为三相逆变器的增益环节,L为输出滤波电感,rL为滤波电感的寄生电阻。KPWM等于直流电压的一半与三角载波幅值的比值:

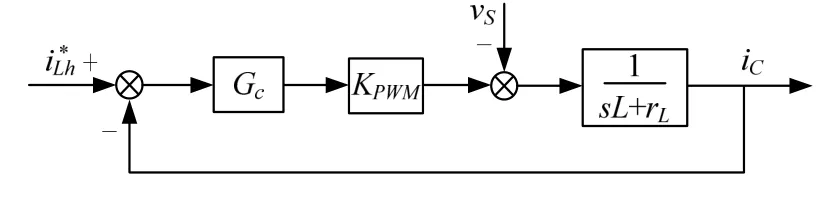
图4 控制系统传递函数模型
根据图4所示的模型,可写出PAPF的输出补偿电流ic关于iLh*和vs的表达式为:

由式(2)可知,PAPF的输出补偿电流ic由两部分组成:一部分决定于指令电流iLh*;另一部分决定于电网电压vs。前一部分反映的是ic跟踪指令电流的状况,后一部分反映的是电网电压vs对ic的影响。可以看出,只有当控制器Gc在指令电流iLh*和电网电压vs的各自频率处增益无穷大,才能实现无差跟踪。
对PAPF系统而言,根据式(2)可知,在电网基波电压的作用下,逆变器的输出补偿电流中会出现基波电流分量,其大小由式(2)的右边第二项决定。这种基波电流会引入一定的有功功率到逆变器支路当中,造成逆变器直流侧电容电压的不稳定,同时,还会增加逆变器的容量和开关管的电流应力。为消除电网电压对输出补偿电流的影响,可以采用电网电压前馈控制。
前馈控制的基本思想为:从扰动的接入点增加一条如图5所示的前馈通道到控制器Gc的输出端,前馈系数为三相逆变器的增益环节KPWM的倒数。可以看出,引入电网电压vs前馈后,vs对ic的影响被抵消,此时,ic关于iLh*的表达式为:

对于PAPF而言,指令信号为谐波电流,其中包含了多种频率成分的交流分量。以三相不控整流电路为例,其负载电流中包含6k±1次的谐波分量,要实现对这种指令信号的无差跟踪,则需要满足:


图5 电网电压前馈控制的系统传递函数模型
其中,ω0为基波角频率。这意味着在各次谐波的角频率处,控制器 Gc的增益均为无穷大,显然,PI调节器无法做到这一点。基于内模原理的重复控制器则可以很好地解决这一问题,实现对谐波电流的无差跟踪。
2.3 复合控制系统
图6为重复控制系统结构图。图中,r、e、d、y分别表示指令信号、误差信号扰动信号和实际输出,虚线框内所示为重复控制器,它由重复信号发生器、周期延迟环节z–N和补偿器C(z)构成,P(z)表示控制对象。

图6 重复控制系统结构图
重复控制系统中由于存在周期延迟环节,导致其动态性能差。因此,人们提出了很多改善措施。本文将采用PI和重复控制相结合的复合控制方法,这样既可以保证对周期性误差信号的无差跟踪,同时又具有较好的动态性能。
图7为复合控制系统结构图。PI调节器和重复控制器并联在前向通道中,共同调节系统的输出。当系统处于稳态运行时,误差较小,PI调节器的输出较小,此时系统的控制作用主要由重复控制器提供;当系统运行状态突变时,误差随之突变,由于周期延迟环节的作用,重复控制器的输出保持不变,但PI调节器却能对误差突变立即产生调节作用,保证系统具有足够快的动态响应速度,一个周期延迟过后,重复控制器产生调节作用使误差逐渐减小,直至系统达到新的稳定运行状态。

图7 复合控制系统结构图
2.4 PI调节器设计
PI参数的设计主要考虑以下两点:系统截止频率和指令电流对应频段的开环增益。由于采用单电感滤波,为保证开关频率处的谐波得到充分抑制,选取系统截止频率为开关频率(fs=10kHz)的1/5,即2kHz。若考虑对20次以下谐波指令电流实现较好的跟踪,则需要在250Hz~950 Hz的频率段内系统有较大的开环增益。
由图4可知,采用PI调节器时,系统的开环传递函数为:

其中,KP和KI分别为比例系数和积分系数。由此可计算出系统的截止频率ωc为:

可见截止频率主要由比例系数决定,因此,根据截止频率的要求可确定KP。在确定KP之后,根据指令电流对应频段开环增益的要求,可以确定KI。
根据以上原则设计的PI参数为:KP=0.19,KI=500。
2.5 重复控制器设计
补偿器C(z)的设计是重复控制器设计的要点,当采用超前相位补偿的方法时,C(z)可表示为:

其中,Kr为补偿器增益,zk为相位超前环节,F1(z)的作用是实现控制系统的中低频对消,F2(z)的作用是增强控制系统的高频衰减特性。
为保证补偿后系统在低频段具有零增益、零相移的特性,取F1(z)为:

GHC(z)为复合控制系统的等效控制对象,采用后向差分进行离散化可得:

为保证补偿后系统在高频段具有很强的衰减特性,取F2(z)为二阶Butterworth低通滤波器,在s域中其传递函数为:

取其截止频率为2kHz,品质因素Q=0.707,
采用后向差分进行离散化可得:

为补偿系统在高频段的相位滞后,取 zk=z4,即对相位进行4拍超前补偿。补偿器增益取Kr=1,重复信号发生器的Q(z)环节按常数设计,取为:Q(z)=0.98。
3 仿真分析
利用Matlab/Simulink仿真平台对本文所设计的并联型有源电力滤波器(PAPF)在PI控制加前馈控制以及复合控制下分别进行仿真。
图8为PI控制中引入电网电压前馈控制的仿真波形。其中,iLa、iDa、iCa、iSa分别表示a相负载电流、所检测到的谐波电流、补偿电流和电源电流,电流波形FFT分析如表1所示。
从图8和表1信息可知,当采用PI调节器进行电流跟踪控制时,由于调节器的增益和带宽有限,无法实现对谐波指令信号的无差跟踪。当三相整流电路的其中某两相发生换流时,参与换流的两相负载电流产生突变,负载电流中的谐波电流也随之突变,即PAPF的指令电流发生突变,对于这种突变的指令电流,PI调节器难以实时跟踪,而是表现出有较大的延时,当这种延时的补偿电流注入到电网中,会使得电网电流产生突升或突降的尖刺。同时,由于补偿电流的实时性差,导致电源电流的THD仍较大。
采用PI和重复控制相结合的复合控制可以较好的解决这一问题,图9为复合控制的仿真波形,表2为对应的FFT分析结果。采用复合控制时,电源电流基本上不存在突升或突降的尖刺,表现出比较光滑的正弦波形,THD也只有0.79%。
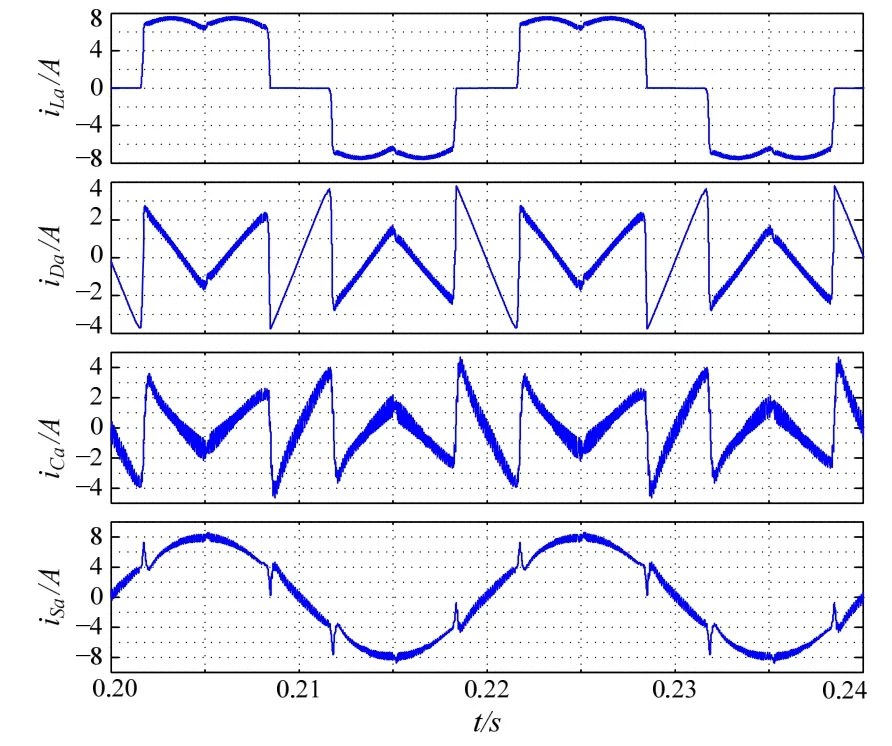
图8 电网电压前馈控制仿真波形

表1 电网电压前馈控制仿真结果FFT分析

图9 复合控制仿真波形

表2 复合控制仿真结果FFT分析
4 总结
针对应用于三相三线制系统中的 PAPF系统,本文分析了基于瞬时无功理论的谐波电流检测方法,为保证电网电压畸变时仍然能准确的检测出负载谐波电流,采用 d-q法进行谐波电流检测。为消除电网电压对 PAPF输出补偿电流的影响,采用电网电压前馈的控制策略。针对整流性负载换流引起的电流突变,采用PI调节器和重复控制相结合的复合控制方法来提高PAPF的补偿性能。
[1]陈坚,康永,阮新波等.电力电子学-电力电子变换和控制技术[M].北京:高等教育出版社,2004.
[2]张凯.基于重复控制原理的CVCF-PWM逆变器波形控制技术研究[D].武汉:华中理工大学,2000.
[3]王兆安,杨君,刘进军.谐波抑制和无功功率补偿[M].北京:机械工业出版社,1998.
[4]吴勇.有源电力滤波器若干关键技术研究[D].武汉:华中科技大学,2007.
[5]Akagi H.Trends in active power line conditioners[J].IEEE Transactions on Power Electronics,1994,9(3):263-268.
[6]Peng F Z.Harmonic sources and filtering approaches[J].IEEE Industry Applications Magazine,2001,7(4):18-25.
Design and Simulation Research on Parallel Active Power Filter
LIU Yong
(Naval Military Reprentative Office in Jiangnan Shipyard (Group) Co.,Ltd.,Shanghai 201913,China)
The d-q method based on instantaneous reactive power theory is used to detect harmonic current.Repetitive control strategy based on internal model principle is introduced and the combined control method of repetitive control and PI control is applied to improve the system performance.The simulation model is built and researched using Matlab/Simulink at last.
RAPF; repetitive control; PI control
TM71
A
10.16443/j.cnki.31-1420.2015.04.017
刘勇,男,硕士,工程师。研究方向:船舶电气。
