仿生划水鸭蹼的水动力学分析
2015-10-16于振江常宗瑜
刘 磊,于振江,常宗瑜
(中国海洋大学工程学院,山东 青岛 266100)
仿生划水鸭蹼的水动力学分析
刘 磊,于振江,常宗瑜
(中国海洋大学工程学院,山东 青岛 266100)
为了研究鸭蹼形状对划水推进性能的影响,建立了划水鸭蹼仿生推进模型。利用动网格技术对鸭蹼在水下划水的过程进行了研究,分析了菱形鸭蹼的水动力学性能并与三角形鸭蹼进行了对比。仿真结果表明,鸭蹼的推进是阻力推进和升力推进两个连续的推力产生过程,升力有利于推进,且菱形鸭蹼的推进性能优于三角形鸭蹼的推进性能。
仿生划水鸭蹼;升力;阻力;推进性能
0 引言
水生生物具有在水中高效快速游动的能力。其中,脚蹼推进类动物在游动过程中主要依靠脚蹼的划水产生推进力。两栖动物中的蝾螈、蛙等依靠趾间带蹼的四肢进行划动法推进;鸟类中有游禽,包括鸭、鸳鸯等靠腿的划动游泳;哺乳动物鸭嘴兽在水中也采用这种方式进行游动[1]。采用划动法推进的动物趾间普遍有蹼,划动法推进过程为:当脚蹼向后划动时蹼趾展开为面,尽可能多地增加划水面积;而当肢体收缩回复时蹼趾褶缩成团,降低回程流体阻力,蹼趾如此往复运动,推进鸭体间歇前进。由此可见,鸭蹼划动时的推进力主要由流体惯性力所提供[2]。
目前,国内学者的研究多集中在动力学分析与实验方面,机器人运动时的涡流不能直观地展现出来,不能很好地对涡流情况进行详细的分析。常宗瑜和陈金磊等人[3]设计并制作了仿生鸭蹼推进机器人,同时进行了实验和多体动力学分析,证明了此推进机构的可行性。Walker和Bartol等[4-5]通过实验对水生动物的阻力推进模式和升力推进模式进行了分析比较,认为生物体在中高速游动时采用升力推进模式。L Christoffer Johansson等人[6]通过模拟三角形鸭蹼划水实验证明前后摆动脚蹼划水推进的水鸟在划水过程中不仅仅是阻力模式,升力模式在其推进过程中起积极作用。
上述文献虽然对鸭蹼的推进进行了实验研究,但是在鸭蹼的形状上局限于矩形和三角形的简单模型。为了进一步研究鸭蹼形状对推进性能的影响,在中国海洋大学建立仿生划水鸭蹼模型[3]的基础上(图1)对鸭蹼划水的过程进行分析。按照真实鸭蹼的比例建立了菱形鸭蹼的水动力学模型,采用计算流体力学(CFD)的方法,利用动网格技术处理运动边界问题,通过模拟鸭蹼的摆动,对鸭蹼周围的瞬时涡流进行观察分析,并通过与L Christoffer Johansson的实验进行对比得到一致的结论,阐述了划水鸭蹼推力产生的机理,得到了鸭蹼下划和上划运动参数对升力和阻力的影响,为鸭蹼推进技术的研究和发展提供了一定参考。

图1 仿生划水鸭蹼实验模型[3]
1 划水鸭蹼CFD流场数值模拟
在非定常流场中,鸭蹼的运动所受到水动力主要由流体压强和涡流的结构变化所引起。基于上述流体控制方程和网格选取条件,对一个周期蹼面压强和涡量变化进行仿真,鸭蹼通过改变周围流场压强分布和流场结构,得到鸭蹼的水动力特性。
在进行数值模拟研究之前,综合考虑网格密度、时间步长和边界半径对算例的影响,采用标准k-ε湍流模型作为流场湍流解析模型。仿生鸭蹼在流场中运动引起流场形状变化。为了定义仿生鸭蹼壁面网格运动随时间的变化规律,选取 FLUENT软件提供的DEFINE_CG_MOTION宏,根据仿生鸭蹼在一定角速度运动的过程,编写User Defined Function(UDF)程序。划水运动引起的流场变化是非定常湍流运动,所以选择常规做法采用粘性不可压缩流体的雷诺湍流方程进行分析:
同时,基于有限体积法,根据仿生鸭蹼的运动数学模型和生物原型运动参数,利用FLUENT对鸭蹼运动的三维模型进行数值模拟。选取菱形鸭蹼进行建模,设定鸭蹼运动的起始位置与x轴正方向的夹角为30°,绕z轴顺时针运动,鸭蹼的划水速度为1.5rad/s,拍动幅值120°,时间步长0.001s。流体温度20℃,流体密度1.02×103kg/m3,运动粘度1.053×10-6m/s2。
菱形鸭蹼的弦长为50mm,展长为80mm的网格计算区域为20×10×10倍鸭蹼展长,网格数120×80×80,并对鸭蹼周围的边界层网格进行局部加密,假定上边界速度不受水翼划水扰动影响,右边界为速度入口,左边界为自由出口,相对压力为零,鸭蹼与下边界近似为无滑动壁面边界条件,得到鸭蹼表面瞬时压力分布云图和涡流分布云图,如图2所示。

图2 压力和涡流矢量分布云图
利用计算流体力学方法对仿生鸭蹼的运动过程进行近场数值模拟,结果分析了仿生鸭蹼划水时弦向截面近场涡流的变化情况,发现仿生鸭蹼的一个划水周期内其上缘涡不脱离蹼面和下缘涡加速脱泻现象,与生物划水运动时的流程结构特征相符,表明仿生鸭蹼运动具备提供并维持推进力的能力。流场结构变化对鸭蹼划水的水动力具有重要影响,能够实现相对高效的仿鸭蹼划水推进。
2 鸭蹼划水阶段的推进模式分析
为了更好地展现菱形鸭蹼的推进过程,把鸭蹼的划水过程分为两个阶段进行水动力分析,并分别对每个阶段的涡流情况从面x-y、x-z、y-z三个方向进行切片,以便更加直观地观察鸭蹼划水推进的过程。
第一阶段是鸭蹼推进行程的开始,鸭蹼向后划动。之后,在鸭蹼的吸力面形成一个封闭的涡流(如图4所示),在这个阶段,鸭蹼相对于水向后移动,水被加速并且向后拉到鸭蹼的背风面。作用在鸭蹼上的反作用力是流体动力学中的阻力,相对于鸭蹼的运动方向是向前的。这个力是在这一阶段中有用的推进力。
因为腿部的旋转,脚的远端边缘的移动速度比其近侧部分快,而且该速度梯度在远端边缘和所述涡流核心存在较低的压力(图3),产生更强的吸力。因此,水应被拉向吸入侧的脚的后缘和侧缘的涡流。以这种方式向后方流动被拉到吸入侧,就像在升力模式中的翼。

图3 鸭蹼迎风面压力分布
推进行程的第二阶段,鸭蹼进入上划阶段,横向速度分量逐渐增大,而向后的速度分量减小。向后速度分量很快变得比游泳速度低。当发生这种情况时,阻力不能向前倾斜,所以推进力不再是阻力型。当鸭蹼开始做与游动方向的横向移动时,附着在鸭蹼上的后缘涡,现在变成了启动涡。三角形鸭蹼在阻力模式中,这些涡流变成不断上升的前缘涡流,在鸭蹼的周围形成U形涡流[8-9]。
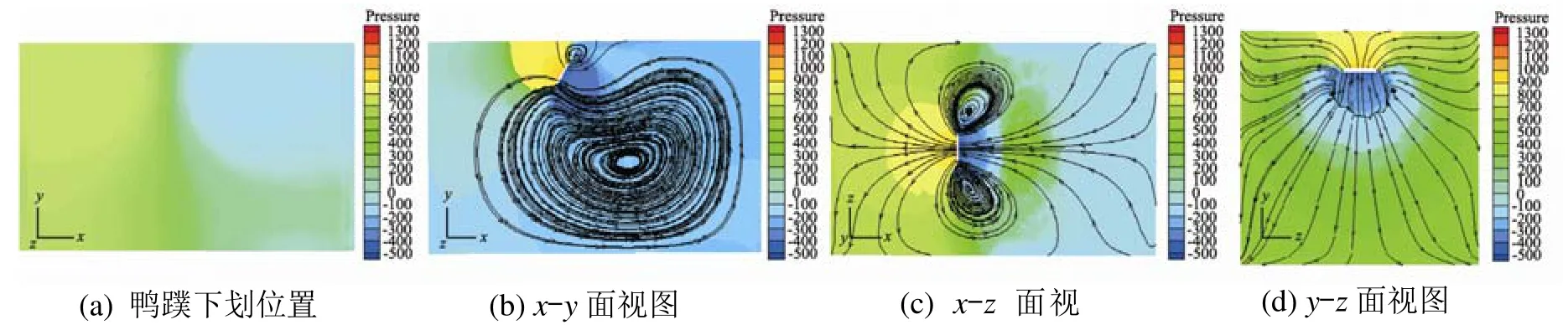
图4 下划阶段涡流矢量切片图
在阻力模式中,环流是在同一个平面上的,当涡流被附着在鸭蹼上时,它向后传播。封闭的U形涡是水向后流动形成的射流,如图5(c)、(d)所示。它的流向与涡流平面大约成直角。升力产生应在升力相位的初期,因为有可能在阻力模式中已经有沿着鸭蹼的吸力侧的向后流动。另外,阻力模式所产生的后缘涡流是作为升力模式的一个起始涡流向后脱落,侧缘涡也是在阻力模式中建立的,后来直接变成了升力阶段前缘涡。当鸭子的游动速度和鸭蹼相对于鸭子的运动速度加入总速度,得到的鸭蹼相对水的速度是斜向前的,与鸭蹼形成一个攻角。这个角度取决于鸭蹼在划水路径中的位置、鸭子的游动速度和脚蹼的划动速度,还有鸭蹼在划动过程中的变化。作用在鸭蹼上的反作用力方向是斜向前的,与涡流形成的喷射水流的方向相反。这个过程,产生的反作用力向前倾斜,所以它有一个向前的升力分量。这个有用的推进力是由升力产生的。

图5 上划阶段涡流矢量切片图
通过水动力学分析,菱形鸭蹼得到的涡流矢量图(图5)与L Christoffer Johansson[6]中三角形鸭蹼的实验结果相吻合(图6(a)对应x-y面视图,图6(b)对应y-z面视图),呈现出了相同的涡流规律。证明了鸭蹼的划水过程可以产生推力,鸭蹼在划水时不仅仅是采用阻力模式进行运动,而是在一个划水的周期中,有连续的两个阶段为鸭子提供推进力,下划阶段主要基于阻力模式,上划阶段升力模式起一定作用。
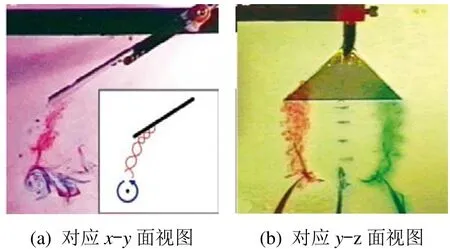
图6 三角形鸭蹼划水涡流实验[6]
3 菱形鸭蹼的推进性能分析
为了更直观地体现菱形鸭蹼的推进性能,将三角形鸭蹼与菱形鸭蹼作对比,分别建立了仿生鸭蹼的三角形和菱形的物理模型,并进行流体数值模拟。分别模拟和检测鸭蹼在一个划水运动周期内,在运动方向x轴上的阻力系数和y轴上的升力系数变化情况。
菱形和三角形鸭蹼在一个划水周期内划水阻力系数Cd和划水升力系数Cl变化的数值计算结果如图7、8所示。可见菱形鸭蹼的水动力数变化规律,Cd波峰出现在0.8s附近,Cl曲线在一个周期内连续变化一次。迎水面积一定时,物体受到的水阻力,理论上是相同的。鸭蹼在划水的过程中,x轴的迎水面积是先增大后减小的,与理论分析上的阻力系数曲线相吻合。通过阻力系数图可以直观的看到相同面积的菱形和三角形鸭蹼受到的阻力非常接近,因为进行水动力学分析时,两种鸭蹼的面积是相等的。

图7 鸭蹼形状对划水阻力系数的影响

图8 鸭蹼形状对划水升力系数的影响
随着划动速度方向趋于水平,所有鸭蹼的阻力系数增大,升力系数减小。在静水情况下,在阻力系数达到峰值,菱形鸭蹼的升力系数接近零。也就是说,只有当鸭蹼的划动方向与水平方向呈现一定夹角时,才有升力产生。根据第二部分对菱形鸭蹼的涡流矢量图线的分析,菱形鸭蹼形成的U型涡流与三角形鸭蹼相比范围更大,更有利于升力的产生。
综合上述分析,菱形鸭蹼和三角形鸭蹼在一定划动速度下,涡流形成规律和压力分布情况与实验结果相同。同时根据鸭蹼的力学分析和涡流分析,证明升力在上划阶段有利于鸭子的推进,提供更多的推进力,所以这种划水模式比单纯的阻力推进有更好的推进性能,在运动过程中能节省更多的能量。
4 结论
1)利用计算流体力学方法对仿生鸭蹼的运动过程进行近场数值模拟,模拟结果分析了仿生鸭蹼划水时弦向截面近场涡流的变化情况,发现仿生鸭蹼在一个划水周期内其上缘涡不脱离蹼面和下缘涡加速脱泻现象。
2)菱形鸭蹼得到的涡流矢量图与L Christoffer Johansson中三角形鸭蹼的划水实验结果相吻合,呈现出了相同的涡流规律。证明了鸭蹼的划水过程可以产生推力,并验证了鸭蹼在划水时不仅仅是采用阻力模式进行运动,而是在一个划水的周期中有连续的两个阶段为鸭子提供推进力,下划阶段主要基于阻力模式,上划阶段升力起一定作用。
3)水动力学数值分析的结果表明,鸭蹼表面的阻力系数在运动周期中的变化规律与理论的阻力变化规律相符。结果表明,在划水速度一定时,菱形鸭蹼推进性能 (升力系数)比三角形鸭蹼推进性能好。
[1]王振东.漫话动物运动对仿生力学的启示[J].力学与实践,2005,27(2):10-12.
[2]McPhail L T,Jones D R.The relationship between power output and heart rate in ducks diving voluntarily[M].Comp:Biochem Physiol A,1998.
[3]Yuan Dai,Chen Jinlei,Chang Zongyu.A novel bionics bropulsion mechanism of underwater vehicle based on duck's swimming[M].China Academic Journal Electronic Publishing House,2013:1-5.
[4]Walker J A.Dynamics of pectoral fin rowing in a fish with an extreme rowing stroke:the threespine sticklebake (gasterosteus aculeatus) [J].The Journal of Experimental Biology,2004,354:112-115.
[5]Walker J A.Westmeat M W.Kinematics,dynamics and energetics of rowing and flapping propulsion in fishes [J].Integrative and Comparative Biology,2002,326:95-98.
[6]Christoffer L,Johansson*& R A,Ke Norberg.Delta-wing function of webbed feet gives hydrodynamic lift for swimming propulsion in birds[M].Nature Publishing Group,2003:65-67.
[7]王福军.计算流体动力学分析——CFD软件原理与应用[M].北京:清华大学出版社,2004.
[8]Katz J,PlotkinA.Low-speed Aerodynamics[M].New York:McGraw-Hill,1991.
[9]Lee M,Ho C M.Lift force of delta wings[J].Appl.Mech.Rev.,1990,43:209–221.
[10]Terrye L,Aigeldinger,Frank E.Hydroplaning by duckings:overcoming limitations to swimming at the water surface[J].The Journal of Experimental Biology,1995,335:158-161.
Hydrodynamic Analysis of Biomimetic Swimming Duck Flippers
LIU Lei,YU Zhen-jiang,CHANG Zong-yu
(Engineering College,Ocean University of China,Qingdao 266100,China)
In order to study the effect of duck flippers shape on swimming propulsion performance,the paddling duck web bionic propulsion model is established.The process of duck flippers swimming under water is studied by using the moving grid technology.Hydrodynamic performance of diamond duck webs is analyzed.And it is contrasted with that of the triangular flippers.The simulation results show that,the propulsion of duck flippers is two continuous thrust including process of drag and lift force propulsion.Lift force is conducive to advancing,and the propulsion performance of diamond flippers is better than that of the triangle duck flippers.
biomimetic swimming duck flippers; lift force; drag; propulsion performance
TH126
A
10.16443/j.cnki.31-1420.2015.04.008
刘磊(1990-),男,硕士研究生,研究方向:机电一体化及海洋装备与仪器
