ROV水动力特性试验研究
2015-09-11钟朝廷张印桐张永祥徐诗婧
钟朝廷+张印桐+张永祥+徐诗婧

摘 要:通过研究开架式ROV水动力特性,分析了开架式ROV特殊的几何外型和作业特点,讨论了研究的必要性,通过1∶4的拘束模型试验测得了一套无因次水动力系数,并得到了五自由度ROV运动方程。该试验对校正ROV水动力模型、提高仿真精准度起到了至关重要的作用。
关键词:ROV;水动力系数;拘束模试验;试验数据
中图分类号:U661.43 文献标识码:A DOI:10.15913/j.cnki.kjycx.2015.17.013
ROV(Remotely Operated Vehicle)即遥控式无人潜水器,因其水下作业时间长,并且能够在深海和复杂危险的工作环境中完成高强度、高负荷的作业任务,所以,被广泛应用于海洋资源开发、水下工程、海底调查和打捞作业等领域。当前,安全性和稳定性对ROV实际作业十分重要,ROV水动力特性和运动控制策略是ROV研发过程中的2大关键技术,而ROV运动控制策略又依赖于其本身的水动力特性。因此,在研究ROV水动力特性时,要建立适用于ROV的运动数学模型,从而得到一套较为完备、准确的水动力系数。
当前,绝大多数ROV的运动仿真都是基于美国海军泰勒水池(DTNSRDC)发表的“模拟潜艇的标准运动方程”进行的,并适当简化。然而,该方程中的黏性水动力项是基于等速直航状态下进行泰勒展开,再根据潜艇的几何特性(左右对称、前后不对称、上下近似对称)和实验结果简化水动力项得到的。因为ROV几何外形具有左右对称、前后近似对称、上下不对称和框架式结构的特点,所以,可判定其与潜艇有很大的差别;因为ROV布置有多个推进器,作业时能够进行前后、左右、上下、原地回转等灵活运动,这与潜艇以纵向直航为主要运动特点也有很大的差异。由此可知,用潜艇标准运动方程不能很好地描述ROV的运动特性。Fossen假设ROV前后、左右、上下对称,提出了一种简化的、用于ROV的运动数学模型。这种ROV运动数学模型简单明了、水动力系数少,获取比较方便,而且考虑到ROV灵活多变的运动特性,特别是在低速作业的情况下,它能较好地模拟ROV运动,所以,近年来被不少学者运用。但是,这种数学模型忽略了ROV自身几何外形上前后、上下的不对称性,因此,还是与实际运动状况有一定的差异。
到目前为止,仍然缺少1套经过大量试验验证、被广泛认可的ROV水动力模型。ROV水动力模型的主要研究方法有CFD 仿真计算、系统辨识(SI)和拘束模型试验。由于ROV外型复杂、附体较多,并且流体力学理论、计算方法和设备还不够完善,所以,CFD 仿真计算受到了一定的限制。因为系统辨识(SI)主要依赖ROV实际航行过程中传感器测得的数据,而鉴于传感器的精度等问题,测得的结果一般误差比较大,所以,这种方法多用于水动力模型的修正。目前,模型试验仍然是研究ROV水动力模型最有效的手段。因此,本文选用拘束模试验研究ROV水动力性能。
本文先介绍了所研究的ROV,然后介绍了ROV模型试验、试验装置和方案,之后介绍了试验数据处理方法,并给出了无因次水动力系数,最后作了相关总结。
1 ROV总体性能
以英国SMD公司生产的工作级Quantum为例,研究了这一类型的深水作业型开架式ROV。如图1所示,Quantum是SMD公司成熟的水下机器人产品,它可以在高强度电流下稳定工作。该ROV拥有强劲的动力,可以完成各种复杂的工作,主要技术参数如表1所示。
2 ROV水动力试验
2.1 ROV试验模型
根据 ROV 的本体结构和布置特征,建造了缩尺比为1∶4的试验模型,模型情况如图2所示。该模型长0.875 m,宽0.5 m,高0.5 m,质量约为78 kg。模型上部为浮力材料,下部桁架为铁质。该模型只制作了 ROV 本体,并没有考虑缆线和机械手等部分。
2.2 试验装置和试验方案
ROV水动力试验分为2部分,一部分试验在哈尔滨工程大学循环水槽完成。试验模型用2根连杆与平面运动机构(PMM)相连,以约束模型运动;另一部分试验在“风、浪、流海洋环境模拟水池”(大水池)(50 m×50 m×30 m)进行,模型通过连杆与XY航车相连,以约束模型运动。循环水槽长17.3 m,宽6.0 m,高2.77 m;工作段长7.0 m,宽1.7 m,高1.5 m;最大流速为2.0 m/s;平面运动机构最大振幅为0.04 m;震荡周期为1~5 s;频率0.2~1 Hz;2根连杆跨距为0.40 m。在试验过程中,水温为14 ℃,受试验装置的限制,并没有作横摇试验。试验工况如表2所示。
3 试验数据处理和结果分析
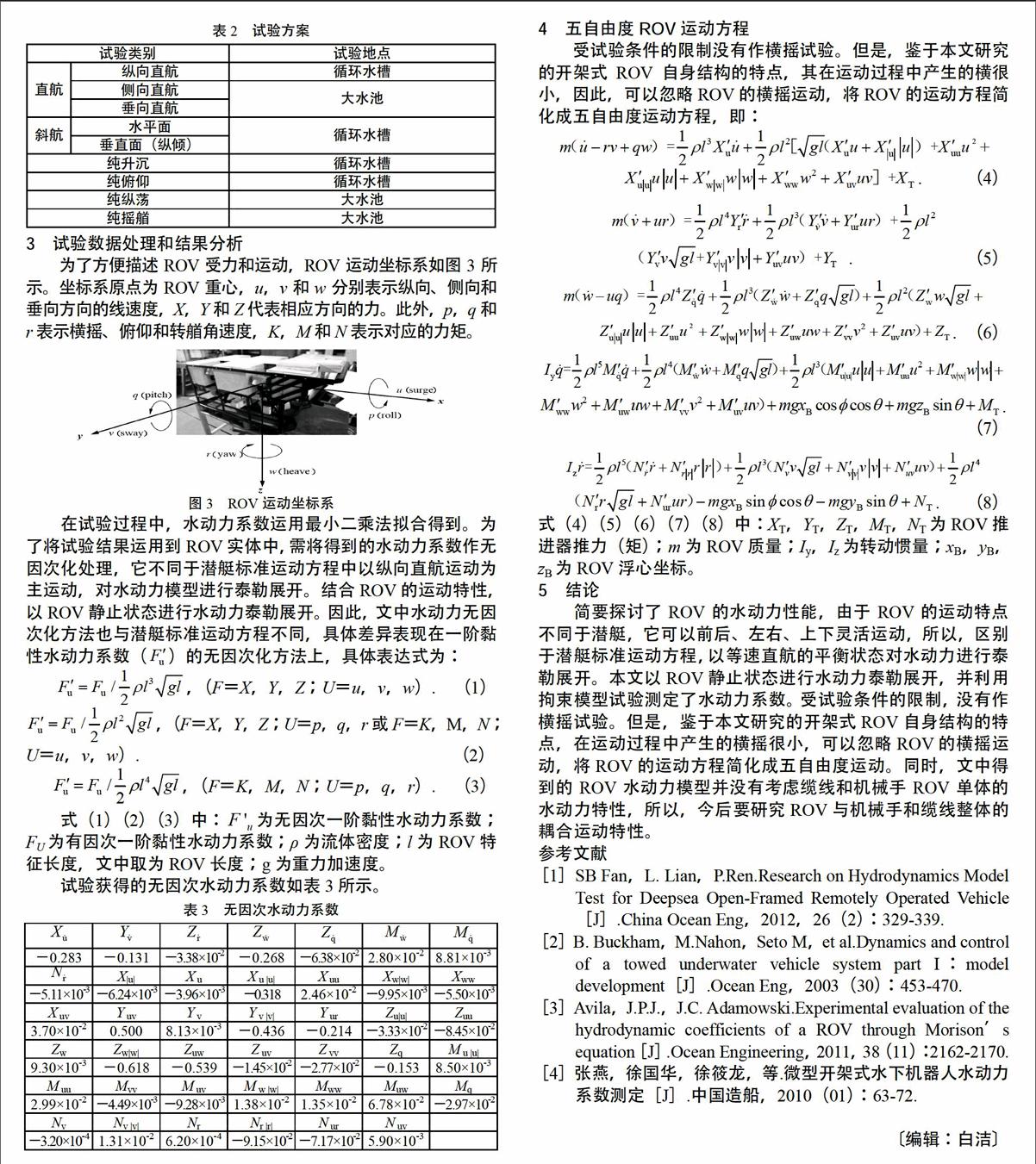
为了方便描述ROV受力和运动,ROV运动坐标系如图3所示。坐标系原点为ROV重心,u,v和w分别表示纵向、侧向和垂向方向的线速度,X,Y和Z代表相应方向的力。此外,p,q和r表示横摇、俯仰和转艏角速度,K,M和N表示对应的力矩。
在试验过程中,水动力系数运用最小二乘法拟合得到。为了将试验结果运用到ROV实体中,需将得到的水动力系数作无因次化处理,它不同于潜艇标准运动方程中以纵向直航运动为主运动,对水动力模型进行泰勒展开。结合ROV的运动特性,以ROV静止状态进行水动力泰勒展开。因此,文中水动力无因次化方法也与潜艇标准运动方程不同,具体差异表现在一阶黏性水动力系数( )的无因次化方法上,具体表达式为:
式(1)(2)(3)中: 为无因次一阶黏性水动力系数;FU为有因次一阶黏性水动力系数;ρ为流体密度;l为ROV特征长度,文中取为ROV长度;g为重力加速度。
试验获得的无因次水动力系数如表3所示。
表3 无因次水动力系数
4 五自由度ROV运动方程
受试验条件的限制没有作横摇试验。但是,鉴于本文研究的开架式ROV自身结构的特点,其在运动过程中产生的横很小,因此,可以忽略ROV的横摇运动,将ROV的运动方程简化成五自由度运动方程,即:
式(4)(5)(6)(7)(8)中:XT,YT,ZT,MT,NT为ROV推进器推力(矩);m为ROV质量;Iy,Iz为转动惯量;xB,yB,zB为ROV浮心坐标。
5 结论
简要探讨了ROV的水动力性能,由于ROV的运动特点不同于潜艇,它可以前后、左右、上下灵活运动,所以,区别于潜艇标准运动方程,以等速直航的平衡状态对水动力进行泰勒展开。本文以ROV静止状态进行水动力泰勒展开,并利用拘束模型试验测定了水动力系数。受试验条件的限制,没有作横摇试验。但是,鉴于本文研究的开架式ROV自身结构的特点,在运动过程中产生的横摇很小,可以忽略ROV的横摇运动,将ROV的运动方程简化成五自由度运动。同时,文中得到的ROV水动力模型并没有考虑缆线和机械手ROV单体的水动力特性,所以,今后要研究ROV与机械手和缆线整体的耦合运动特性。
参考文献
[1]SB Fan,L. Lian,P.Ren.Research on Hydrodynamics Model Test for Deepsea Open-Framed Remotely Operated Vehicle[J].China Ocean Eng,2012,26(2):329-339.
[2]B. Buckham,M.Nahon,Seto M,et al.Dynamics and control of a towed underwater vehicle system part I:model development[J].Ocean Eng,2003(30):453-470.
[3]Avila,J.P.J.,J.C. Adamowski.Experimental evaluation of the hydrodynamic coefficients of a ROV through Morisons equation[J].Ocean Engineering,2011,38(11):2162-2170.
[4]张燕,徐国华,徐筱龙,等.微型开架式水下机器人水动力系数测定[J].中国造船,2010(01):63-72.
〔编辑:白洁〕
