基于UG的偏心机构模型运动仿真
2015-09-10曹旺萍
曹旺萍






摘 要: 文章以偏心机构为例,介绍了利用 UG 软件实现偏心机构模型的运动仿真及分析的方法和具体步骤,采用了运动函数驱动,以动画表现偏心机构的整个运动过程,用图表反映运动仿真结果,旨在为偏心机构优化设计提供参考。
关键词: 偏心机构 UG 运动仿真
1.引言
利用UG運动分析模块进行机构的运动仿真分析,能够自动跟踪零件的运动轨迹,通过图表与图形表达从动件的位移、速度、加速度等运动规律,得到运动规律的数值及特性曲线图,并且通过动画演示偏心机构的实际运动过程,确定整个设计的合理性并进行运动干涉分析。UG的运动分析模块实现机构的运动仿真,为下一步做有限元分析、强度分析、结构分析及优化设计打好了基础。
2. UG运动仿真模块简介
UG的运动仿真模块是对机构的运动轨迹进行跟踪,从而分析机构速度、加速度、位移、作用力及反作用力等。在UG环境下,可以将机构看做是一组连在一起进行运动的连杆的集合,机构进行运动仿真与分析主要分三个阶段:(1)前处理器阶段。这个阶段主要是创建分析方案,将分析方案得到的信息传送到ADAMS解算器;(2)求解阶段。利用ADAMS解算器求解输入数据,将求解结果传送到运动分析模块;(3)后处理阶段。运动分析模块分析求解结果,将其转换成图表及报表文件,并生成动画。ADAMS解算器可以处理相当复杂的运动模型,在整个运动仿真过程中起着非常重要的作用。但是如果有更复杂的分析需求时,就要生成ADAMS输入文件,ADAMS输入文件的主要作用是输入标准的ADAMS软件包,后处理阶段读入ADAMS软件,从而转换成所需要的动画、图表及报表文件。
3.偏心机构的运动仿真
运动分析方案的创建是进行运动仿真的关键。
(1)连杆(Links)的创建。将偏心机构活动构件建立连杆,底板、滑座和支座设为固定连杆1,手轮、过渡轮和连接轴设为连杆2,连杆设为连杆3,滑棒设为连杆4,如图1所示。
(2)添加运动副。运动副创建之前,机构中的连杆是自由的,没有约束,具有6个自由度,UG分析模块提供12种运动副类型,共分为两大类:普通类型的运动副8种,特殊类型的运动副4种。普通类型的运动副是独特的,只与自身有关。特殊类型的运动副是在两个普通类型的运动副之间定义了特殊关系的运动副,它允许两个普通类型的运动副一起发挥特定的功能,偏心机构的运动副一共涉及两种,分别是旋转副和滑动副,如图2所示。
(a)旋转副1 (b)旋转副2
(c)旋转副3 (d) 滑动副
图2 旋转副和滑动副
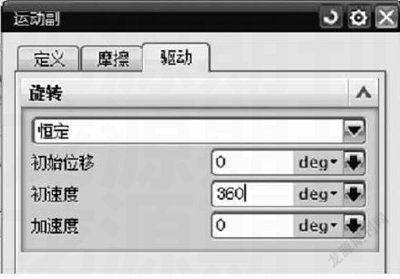
(3)定义运动驱动。偏心机构的运动采用的是匀速驱动。即将连杆2的旋转副设为主动件,设定初速度为360,如图3所示。
(4)运动仿真。UG进行运动仿真时,需要输入时间与步数两个参数,偏心机构的解算时间设置为10,步数为350,如图4所示。
图4 解算方案 图5 新建运动模型
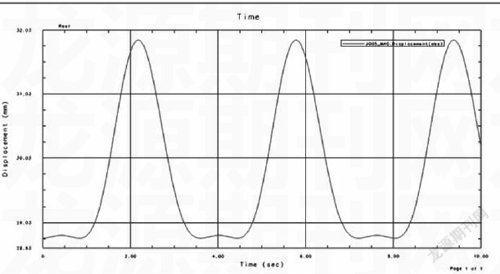
(5)运动模型。新建运动模型,需要计算的是滑棒的运动模型函数,添加滑动副,如图5所示。可以用电子表格显示结果曲线,如图6所示为滑棒滑动的位移曲线。
图6 滑棒滑动的位移曲线
(6)运动模型建立后,可以得到运动仿真过程,如图7所示。
(a)滑棒左端位置 (b)滑棒右端位置
图7 运动仿真过程
4.结语
利用UG运动仿真模块对液压支架进行运动仿真能够解决复杂机构的运动学问题,从而达到精确的仿真效果。对偏心机构的运动仿真,真正体现出三维CAD设计理念的巨大优势。运动仿真可以对数字样机进行各种分析,而这些是传统二维设计不能做到的。按照传统的设计方法,许多分析必须等到物理样机做出来之后进行,例如干涉检查。这样不但会造成设计周期过长,而且会造成大量资金的浪费。
参考文献:
[1]贾大玮.基于UG的液压支架模型运动仿真与分析[J].煤矿机械,2012,33(3):43-44.
[2]张晋西,张甲瑞,郭学琴.UG NX/MOTION机构运动仿真基础及实例[M].北京:清华大学出版社,2009.4.
