关于非线性系统降维观测器设计方法的研究*
2015-09-09迟子孟王秋琳
迟子孟,周 磊,王秋琳,刘 旭
(天津财经大学珠江学院)
0 引言
在文献[1]中针对具有Lipschitz条件系统的降维观测器设计问题进行了讨论,但其结果却不能应用在非Lipschitz非线性系统的观测器设计问题中,其应用具有一定的局限性.对此,该文主要研究此类非线性系统观测器存在的充分条件,并为该类非线性系统的观测器设计提供新的解决方法.
1 符号说明与研究背景
1.1 符号说明
对任意v=(η1,η2,…,ηn,y,u),ηi∈Rn(i=1,2,…,n),y∈Rp,u∈Rm,定义
对于正定矩阵P,令

1.2 研究背景
现考虑非线性系统具有如下形式:

其中x(t)∈Rn,u(t)∈Rm,y(t)∈Rp,A∈Rn×n,C∈Rp×n.函数Φ:Rn×Rp×Rm→Rn是关于x可微的非线性部分,并且Φ(x)满足

同时具有下列形式
假设C是行满秩的,且(A,C)是可观测的.值得注意的是,如果存在集合{cij;i,j=1,2,…,n}和{dij;i,j=1,2,…,n}使得
而具有该条件的系统(1)的降维观测器设计问题在文献[1]中已经讨论并也提供了相应的解决方法.可见,该文所研究的非线性系统(1)具有更为广泛的应用性.
为了方便讨论,对下面命题进行简单的论证.
命题1FP(μ)<0(∀μ∈D⊃VD)的充要条件是FP(μ)<0(∀v∈VD)(其中P是一个正定矩阵).
证明 由于Fp(Μ)是v∈D的一个仿射变换,利用凸集定理[2]该命题得证.

该文中,同样有
命题2 若C=(IP0)且对于=

使得

证明 记x*=(1,2,…,)T∈Rn-p,则不等式(4)左端第二行第二列的块矩阵为:

,其中z1=(x1,x2,…,xp)T=y∈Rn且z2∈Rn-p.那么,根据系统(1),有如下结果:
用(5)式减去文献[1]中的(12)式的第一个式子,就能得到

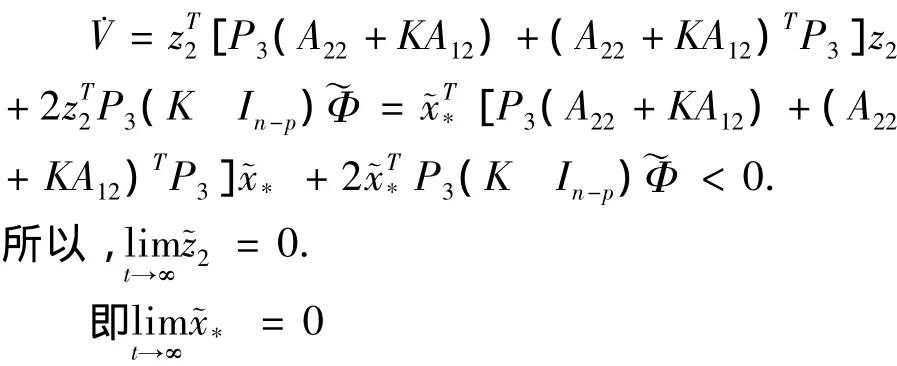
则其导数˙V有如下结果
2 主要结果
结合以上的两个命题,主要给出满足条件(2)式非线性系统降维观测器设计的好方法.

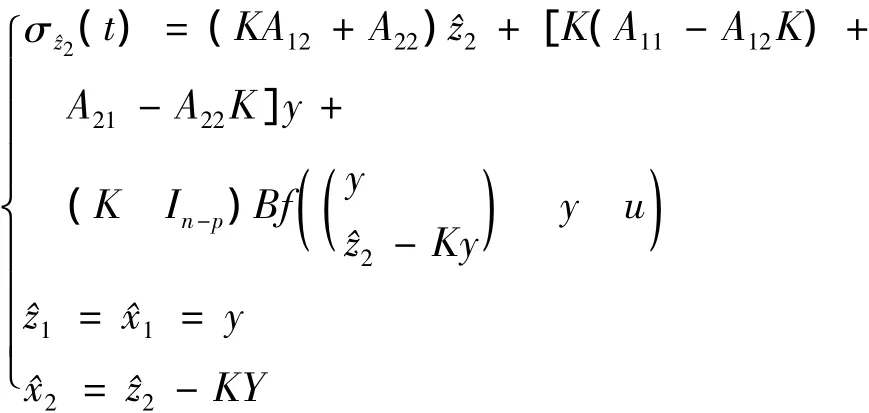
定理 如果系统(1)的非线性部分Φ(x,y,u)满足(2)式,若C=(Ip0)且存在增益矩阵K使得线性矩阵不等式存在对称正定解P,其中vi∈VD(i=1,2,…,l),FP(v)(v∈VD)由(6)式决定.则系统(1)有如下形式的降维观测器,即
证明 对于任意v=(η1,η2,…,ηn,y,u),

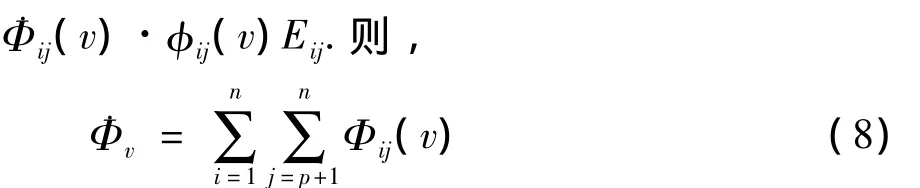
根据(8)式,对于每一个x,x∈Rn满足和正定矩阵P=(pij)n×n∈Rn×n,都存在常数向量η1,η2,…,ηn∈Co(x,),ηi≠xi,ηi≠(i=1,2,…,n)使得下式成立
等式(9)说明

命题1和(10)意味着对于

都满足

根据命题2和(11)定理得证.
[1]迟子孟,王秋琳,周磊.一类Lipschitz非线性系统降维观测器设计.哈尔滨师范大学自然科学学报,2014,4(30):1-4.
[2]Boyd S.Vandenberghe L.Convex optimization with engineering applications.Stanford University Lecture Notes,2001:101-123.
[3]董丽亚.一类非线性系统观测器设计的新方法.系统工程与电子技术,2009,1(31)153–157.
[4]Yang Fuwen.Robust state estimation for linear state delayed and measurement- delaye systems with uncertainties[J].Control Theory and Applications,2003,20(2):211–216.
[5]Zemouche A ,Doutayeb M ,Bara G.Observer design for non-linear systems:An approachbased on the differential mean value theorem[C].Proc.of the 44th IEEE Conference on Decision and Cont rol and European Cont rol Conf erence,2005:6353-6358.
