水下滑翔机李雅普诺夫稳定性分析
2015-08-30赵宝强王晓浩姚宝恒连琏
赵宝强,王晓浩,姚宝恒,连琏
(1.中国舰船研究设计中心,湖北武汉430064;2.清华大学 精密仪器系,北京100084;3.上海交通大学船舶与海洋工程国家重点实验室,上海200240)
水下滑翔机通过改变自身重心相对于浮心的位置和净重力的大小来驱动滑翔机在水下的运动,它通过调节尾舵舵角或改变横滚姿态实现转向,现有水下滑翔机能以0.25 m/s的速度航行上千千米,航行时间可达数月[1-2],同时其成本低,噪音小等优点使得水下滑翔机具有广阔的应用前景[3-4]。Leonard等人对水下滑翔器的稳定性进行了相应的研究[5-9],但其主要研究滑翔机的稳定性判据,没有针对具体滑翔机进行分析,并且没有分析具体设计参数(初稳性高)和控制参数(姿态调节控制量)变化对稳定性的影响。武建国[10]分析水下滑翔机的静稳定性。本文将已建立的水下滑翔机一般数学模型应用于具体的实际水下滑翔机上,在此基础上将模型线性化,结合李雅普诺夫稳定性第一定理和第二定理分析出水下滑翔机稳定性随设计参数(初稳性高)和控制参数(姿态调节控制量)变化的规律。
1 动力学模型
本文涉及的水下滑翔机原理样机内部结构如图1。

图1 水下滑翔机原理样机内部结构Fig.1 Underwater glider prototype internal structure
该样机可以被认为是5个具有独立自由度质量块的组合,分别为平移质量块、旋转质量块、补偿质量块、压载质量块和均布质量。如图2所示。建立固连于原理样机的体坐标系,以浮心坐标为原点,e1轴沿滑翔机纵轴指向艏部;e2轴垂直于e1轴指向右侧机翼;e3轴垂直于e1轴和e2轴铅垂向下。
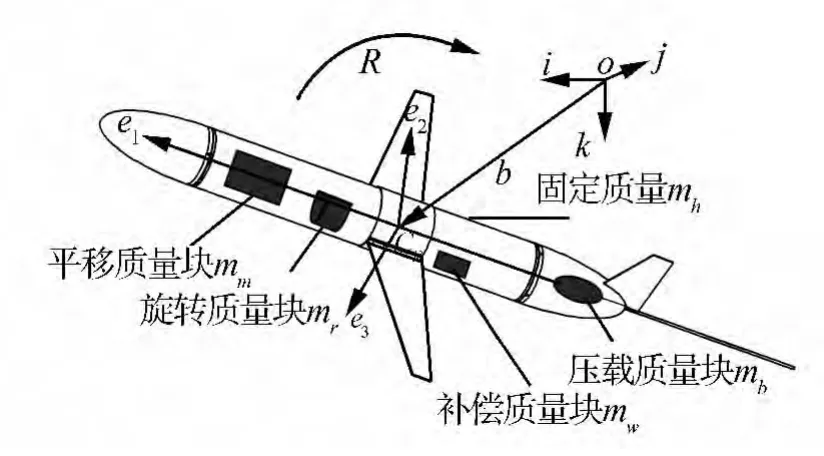
图2 水下滑翔机原理样机模型示意图Fig.2 Schematic diagram of underwater glider model
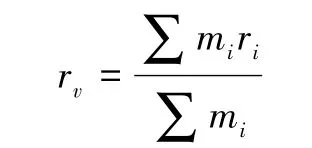
水下滑翔器的总质量mv为

式中:mh为固定质量,包括耐压壳体、控制系统等非运动部件质量,在体坐标系下其质心为rh;mb为压载质量块,即浮力驱动系统,忽略其质心的变化,在体坐标系下其质心为rb;mw为补偿质量块;设计阶段调整该质量块位置使水下滑翔机在初始状态下重心在浮心正下方一定距离即初始稳性高h0,然后使其固定,在体坐标系下其质心为rw;mm为平移质量块;用于调节俯仰角,在体坐标系下其质心,rm2=0。rm0为平移质量块初始位置,xm为平移质量块移动距离;mv为旋转质量块;mr用于调节翻滚角,实现转弯功能,在体坐标系下其质心,式中rr2=rsin δ,rr3-rcos δ,r为偏心距,δ为旋转质量块向右侧偏转角度。
在体坐标系下,水下滑翔器的质心rv为
可移动质量块为平移质量块和旋转质量块,其质心rp由平移质量块质心rm和旋转质量块质心rr决定:



2 稳定性分析
水下机器人的运动稳定性是指受到小干扰后,受扰的运动参数能否自行回到初始运动状态的能力。水下滑翔机一般要求在开环控制下具有稳定性。
2.1 稳性高
船舶的稳定性与稳性高有很大关系,对于水下滑翔机,受到扰动后稳性高影响滑翔机恢复力矩的大小,从而影响定常运动的稳定性。定义水下滑翔机重心与浮心在重力方向上的距离为稳性高:
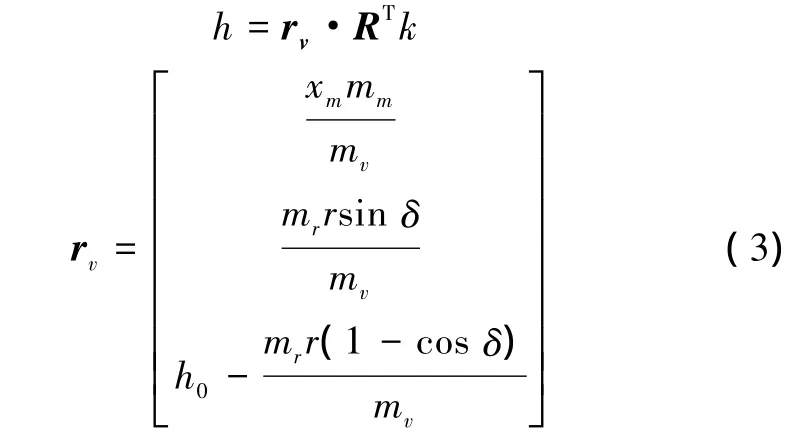
式中,R是由欧拉角描述的坐标转换矩阵[11]。其中俯仰角θ,翻滚角φ满足:


图3 稳性高与初稳性高的关系Fig.3 The relationship between initial metacentric height and metacentric height

图4 稳性高与姿态调节两个控制参数之间的关系Fig.4 The relationship between attitude adjustment parameters and metacentric height
可以看出,稳性高是由设计参数初始稳性高和姿态调节系统的2个控制参数(平移质量块移动距离rrm和旋转质量块旋转角度δ)决定的。它们之间的关系如图3、4所示。
分别变化这3个参数,得到不同的线性方程利用李雅普诺夫稳定性第一定理(A矩阵特征方程所有根均具有负实部)和第二定理(满足李雅普诺夫方程的正定实对称矩阵P各阶主子行列式为正)[12]判断滑翔机的稳定性。在仿真过程中,发现二维运动的稳定性并不能保证三维运动的稳定性。三维定常运动的稳定性受控制参数和设计参数的影响,只有在一定范围内才具有稳定性。所以下节分别对水下滑翔机的两种定常运动[15](直线定常运动和螺旋定常运动)分析。
2.2 初始稳性高对稳定性的影响
2.2.1 直线定常运动
设置滑翔机的控制参数xm=41.36 mm,δ=0°,初始稳性高在0~11 mm变化,利用Lyapunov第一定理得到的线性方程各特征值实部随稳性高的变化如图5所示,从图中可以看出在直线定常运动中当稳性高小于-3.6 mm时系统开始不稳定,所以对照图4(a),为保证直线定常运动的稳定性,在设计时初稳性高最小为0.85 mm。

图5 初稳性高变化时直线运动稳定性随稳性高变化关系Fig.5 Relationship between stability of linear steady motion and metacentric height when initial metacentric varies
2.2.2 螺旋定常运动
设置δ=30°,初稳性高h0在0~11 mm变化,同理得到的结果如图6所示。

图6 初稳性高变化时螺旋运动稳定性随稳性高变化关系Fig.6 Relationship between stability of spiral steady motion and metacentric height when initial metacentric varies
从图中可以看出在螺旋定常运动中当稳性高小于-3.8 mm时有特征值实部大于0,系统开始不稳定,这一结论与Bhatta[9]得到的结果基本吻合。所以对照图3,为保证螺旋定常运动的稳定性,在设计时初稳性高最小为 0.5 mm。

图7 平移质量块移动时直线定常运动稳定性随稳性高变化关系Fig.7 Relationship between stability of linear steady motion and metacentric height when the moving mass moves
2.3 平移块移动距离对稳定性的影响
2.3.1 直线定常运动
设置滑翔机的控制参数h0=5,平移块移动距离xm在控制范围20~100 mm之间变化。利用李雅普诺夫第一方法得到的线性方程各特征值实部随稳性高的变化如图8所示。

图8 平移质量块移动时螺旋定常运动稳定性随稳性高变化关系Fig.8 Relationship between stability of spiral steady motion and metacentric height when moving mass moves
从图中可以看出小于-4.8 mm时系统开始不稳定,所以为保证稳定,在直线运动中需要控制平移块移动距离xm在89 mm范围内。
2.3.2 螺旋定常运动
设置滑翔机的控制参数δ=30°,平移块移动距离xm在控制范围30~80 mm之间变化。利用李雅普诺夫第一方法得到的线性方程各特征值实部随稳性高的变化和利用李雅普诺夫第二方法得到的P矩阵的各阶主子行列式随稳性高的变化如图7所示,从图中可以看出线性方程各特征值实部均小于零,P矩阵正定,所以xm在控制范围30~80 mm内系统保持稳定。
2.4 旋转块旋转角度对稳定性的影响
设置滑翔机的控制参数xm=41.36 mm,mc=0.222 3 kg,h0=5。旋转块旋转角度δ在控制范围之间变化。利用李雅普诺夫第一方法得到的线性方程各特征值实部随稳性高的变化和利用李雅普诺夫第二方法得到的P矩阵的各阶主子行列式随稳性高的变化如图9所示,从图中可以看出线性方程各特征值实部均小于零,P矩阵正定,所以在控制范围内系统保持稳定。
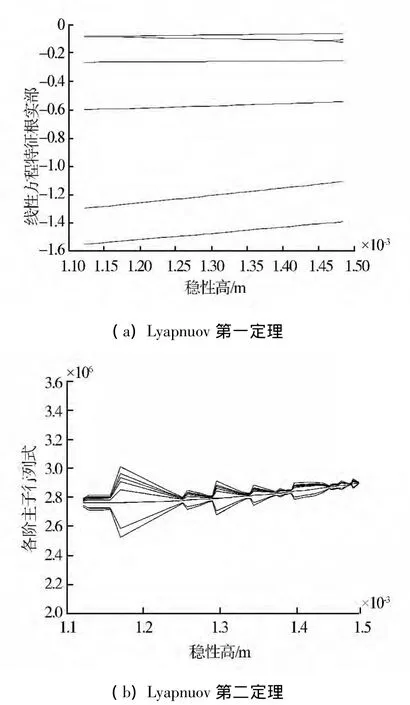
图9 旋转质量块转动时螺旋定常运动稳定性随稳性高变化关系Fig.9 Relationship between stability of spiral steady motion and metacentric height when rotating mass rotates
4 结束语
本文将已建立的水下滑翔机一般数学模型应用于具体的实际水下滑翔机上,在此基础上将模型线性化,结合李雅普诺夫稳定性第一定理和第二定理分析出水下滑翔机直线定常运动和螺旋定常运动稳定性随设计参数(初稳性高)和控制参数(姿态调节控制量)变化而变化的规律。得到了为保持系统动态稳定,得到在特定条件下,为保持水下滑翔机稳定的条件是初稳性高大于0.85 mm,平移块移动距离在89 mm范围内,旋转质量块对稳定性影响很小。在控制范围内稳定性良好。
[1]BACHMAYER R,LEONARD N,GRAVER J,et al.Underwater gliders:recent developments and future applications[C]//2004 International Symposium on Underwater Technology.Taipei,Taiwan,2004:195-200.
[2]DAVIS R E,ERIKSEN C C,JONES C P.Autonomous buoyancy-driven underwater gliders,technology and applications of autonomous underwater vehicles[M].London:Taylor and Francis,2002:37-58.
[3]STOMMEL H.The slocum mission[J].Oceanography,1989,2(1):22-25.
[4]RUDNICK D L R D,RUDNICK D L.Underwater gliders for ocean research[J].Marine Technology Society Journal,2004(2):73-84.
[5]BHATTA P.Nonlinear stability and control of gliding vehicles[D].Princeton:Princeton University,2004:142-169.
[6]BHATTA P,LEONARD N E.Nonlinear gliding stability and control for vehicles with hydrodynamic for cing[J].Automatic,2008,44(5):1240-1250.
[7]BHATTA P,LEONARD N E.A lyapunov function for vehicles with lift and drag:stablity of gliding[C]//43rd IEEE Conference on Decision and Control.Atlantis,Paradise Island Maldives,2004:4101-4106.
[8]LEONARD N E.Stability of a bottom-heavy underwater vehicle[J].Automatica,1997,33(3):331-346.
[9]BHATTA P,LEONARD N E.Stabilization and coordination of underwater gliders decision and control[C]//Proceedings of the 41st IEEE Conference on Decision and Control.Las Vegas,Nevada,USA,2002:2081-2086.
[10]WU Jianguo.System design and performance analysis of hybrid-driven underwater glider[D].Tianjin:Tianjin University,2010:56-87.
[11]GRAVER J G,LEONARD N E.Underwater glider dynamics and control[C]//12th International Symposium on Unmanned Untethered Submersible Technology.Durham,New Hampshire USA,2001:1742-1710.
[12]SASTRY S.Lyapunov Stability Theory[M].New York:Nonlinear Systems,1999:182-234.