三段式转向管柱等速性优化
2015-08-26张炳文
张炳文,蒋 涛,林 安
(潍柴动力上海研发中心,上海201315)
三段式转向管柱等速性优化
张炳文,蒋涛,林安
(潍柴动力上海研发中心,上海201315)
汽车转向管柱的等速性是影响整车操纵性能的重要因素之一。由于受转向管柱布置空间限制,其传动等速性较难保证。本文分析采用十字轴式万向联轴器的转向管柱等速性影响参数,并通过对某轻型客车三段式转向管柱的等速性优化,阐述优化的过程和方法;最后对比优化前后方向盘转动力矩波动值,验证优化方法的正确性。
转向管柱;十字轴式万向联轴器;等速性;ADAMS;优化
现代汽车对整车操纵性能的要求越来越高。汽车转向管柱等速性能引起的操纵力矩波动是影响汽车操纵性能的因素之一[1-2]。大部分汽车转向管柱采用十字轴式万向联轴器[3]。而十字轴式万向联轴器要实现完全等速传动,对布置要求较为严格。特别对于部分轻型客车及乘用车采用十字轴式三万向联轴器的三段式转向管柱,其等速性能更加难以做好。因此,有必要分析影响十字轴式万向联轴器等速性能的参数,并提出优化方法,以优化转向管柱的等速性,改善整车操纵性能。
1 十字轴式万向联轴器传动理论
1.1十字轴式单万向联轴器
十字轴式单万向联轴器结构,如图1所示。
图中传动轴AO、BO相交于点O。AO与BO的夹角为β。十字轴CD、EF垂直。
设AO的角速度为ω1,BO的角速度为ω2,则有如下公式[4]:
式中:φ1为AO轴的转角。
由公式(1)可知,主动轴AO与从动轴BO为不等速传动,其角速度比与β和φ1相关。
1.2十字轴式双万向联轴器
为实现主、从动轴等速传动,可采用十字轴式双万向联轴器。即在输入轴与输出轴之间增加中间轴。如图2所示。
图2中,主动轴1与从动轴3分别平行和相交。如要使主、从动轴的角速度相等,即角速度比恒定等于1,则必须满足下列两个条件[4]:
1)主动轴与中间轴的夹角必须等于从动轴与中间轴的夹角,即β1=β3。
2)中间轴两端的叉面必须位于同一平面内。
1.3十字轴式三万向联轴器
十字轴式三万向联轴器如图3所示。
根据十字轴式万向联轴器的传动公式[4-5],可得:
式中:ω1~ω4分别为1~4轴的角速度;φ1~φ3分别为1~3轴的转角;θ2、θ3分别为中间轴2和3的节叉之间的夹角,即中间轴的相位角。
由公式(2)-(4),可得:
即
由公式(6)可知,从动轴4与主动轴1的角速度之比ω4/ω1与传动轴夹角β有及中间轴的相位角θ相关。
在轴1以恒定角速度ω1转动过程中,要使ω4/ω1值变化尽量小,即等速性能好,可以各传动轴夹角β及中间传动轴相位角θ作为优化变量,用ADAMS软件进行优化。
2 三段式转向管柱等速性优化
2.1结构参数
某轻型客车转向管柱的各硬点及初始相位角如表1所示。
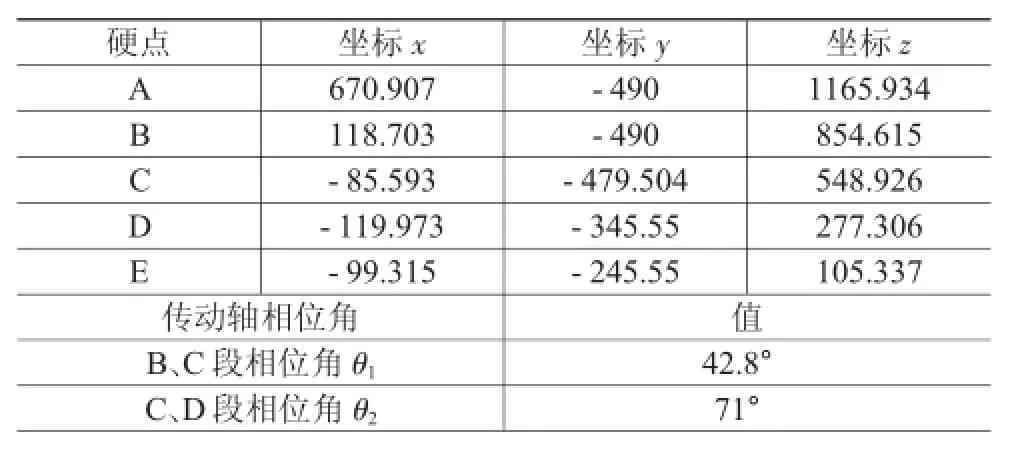
表1 转向管柱硬点坐标及初始相位角
表1中硬点A-E分别为方向盘中心点、各十字轴中心点及转向器输入轴上一点。其中相位角的定义为观察方向从驾驶室端至转向机,下端的十字叉相对上端的十字叉转过的角度,顺时针为正角,逆时针为负角。
2.2数学模型分析
优化三段式转向管柱等速性能需要建立参数化的ADAMS模型。因此,需要分析传动机构各硬点的数学关系。三段式转向管柱传动机构各硬点如图4所示。
由十字轴式万向联轴器结构可知,十字轴两轴相互垂直,传动轴与其节叉垂直。由空间向量计算公式[6]可得,十字节叉各端点坐标方程如公式(7)-(12)。
式中:θ1、θ2分别为BC、CD段传动轴的相位角。
由公式(7)-(12),可分别解出B1、B3、C1、C3、D1、D3点的坐标值与A、B、C、D、E点坐标值及θ1、θ2值的关系式。
2.3ADAMS参数化模型建立
根据2.2得到的B1、B3、C1、C3、D1、D3点的坐标值的关系式,在ADAMS View模块下,建立三段式转向管柱的参数化结构模型,如图5所示。
对主动轴1、中间轴2及从动轴4建立与地面的旋转副。对主动轴1与十字轴B建立旋转副。同样建立其他传动轴与相应十字轴的旋转副。将所有运动副的特征mark点与相应硬点关联,使硬点与运动副联动[7-8]。最后对主动轴1的旋转副设定一个恒定角速度的旋转驱动。三段式转向管柱的参数化模型如图6所示。
2.4仿真优化
在2.3建立的参数化模型上,代入表1中各硬点坐标值及初始相位角值,得到某轻型客车三段式转向管柱的参数化模型[9-10]。
设置计算时间及步数,对模型进行初始仿真。分别测量主动轴1驱动副及从动轴4旋转副的角速度,即上文的ω1及ω4,建立ω4/ω1的测量函数。进行仿真得到ω4/ω1的曲线,如图7所示。角度比范围为0.72~13.8。
以相位角θ1、θ2作为设计变量,观察ω4/ω1的最大值,对其进行优化设计研究。不同的相位角θ1、θ2值对应的以ω4/ω1的最大值如图8和图9所示。
图8、图9中的相位角分别对应θ1、θ2。
以θ1、θ2作为设计变量,以ω4/ω1的最大值在不同设计变量值下的最小值作为优化目标,对模型进行优化。优化结果如图10所示。角度比范围为0.938~1.066。
优化后,传动轴相位角如表2所示。

表2 优化后相位角
对比图8和图11可知,优化前后角速度比波动范围明显变小,即等速性能变好。
优化过程中也可设置B、C、D点的坐标作为设计变量。不同B、C、D点的坐标值对应不同的传动轴夹角β。一般情况下,改变传动轴夹角β优化等速性的效果较改变传动轴相位角好。但由于实际布置空间所限,只能以传动轴相位角作为设计变量。
2.5优化验证
十字轴式传动轴的力矩波动与其传动的转速波动相关。若忽略传动的摩擦损失,主从动轴的瞬时功率相同。转速波动大,则转向力矩波动也相应大[11-13]。
分别对该轻型客车管柱等速性优化前后的样车原地转向方向盘力矩进行测量,测量数据如图11和图12所示。可知优化前后力矩波动范围分别为5.0±2.3 N·m和5.0±0.35 N·m,力矩波动改善明显,优化效果显著。
3 结论
对于采用十字轴式三万向联轴器的三段式转向管柱,其传动等速性能与其各传动轴的夹角及相位角相关。通过建立参数化的ADAMS模型,以传动轴夹角及相位角为变量,能够有效地优化转向管柱的等速性,改善整车操纵性能。
[1]裴锦华,李明.汽车转向系统力矩波动的匹配研究[J].汽车科技,2010,(3)
[2]高新华,黄巨成.基于代理模型的轿车转向柱力矩波动关系研究与优化[J].CAD/CAM与制造业信息化,2008,(2)
[3]陈家瑞.汽车构造[M].2版.北京:机械工业出版社,2005.1.
[4]郑文伟,吴克坚.机械原理[M].7版.北京:高等教育出版社,1997.7.
[5]李论,费二威,李凯,等.双十字轴式万向联轴器中间相位角的优化设计[J].汽车技术,2010,(5)
[6]刘绍学,钱珮玲,章建跃.高中数学[M].选修2-1 A版.北京:人民教育出版社,2007.2.
[7]李增刚.ADAMS入门详解与实例[M].北京:国防工业出版社,2006.4.
[8]李军,刑俊文,覃文洁.ADAMS实例教程[M].北京:北京理工大学出版社,2002.7.
[9]苏宝军,李向华,张运武.十字轴刚性万向节从动轴的Matlab仿真研究[J].传动技术,2004,18(4)
[10]杨洪斌.汽车转向管柱的有限元分析及设计优化[J].机械研究与应用,2012,120(4)
[11]刘新群.十字轴万向传动轴转速波动分析[J].矿业快报,2008,(2)
[12]刘卷苍,仇世侃,祁东辉.单十字轴万向节不等速速比详解互证[J].汽车技术,2008,(8)
[13]何西泠.万向节机构的运动学分析[J].起重运输机械,2001,(6)
修改稿日期:2015-01-05
Optimization ofConstant VelocityPerformanceofSteeringColumn with Three-segment Type
ZhangBingwen,JiangTao,Lin An
(Weichai Power Co.,Ltd,Shanghai R&DCenter,Shanghai 201315,China)
The constant velocityperformance ofautomobile steeringcolumn is one ofthe important factors that affect the vehicle steering performance.Because the steering column layout space is limited,the constant velocity performance is difficult to guarantee.The authors analyze the parameters which influence the constant velocity performance of steering column with cross shaft universal coupling,optimize the constant velocity performance of the steering column for a light bus and introduce the optimization process and method.Finally,the comparision of fluctuation value of the torque of the steering wheel before and after the otimization prove the correctness of the optimization method.
steeringcolumn;cross shaft universal coupling;constant velocityperformance;ADAMS;optimization
U463.4
B
1006-3331(2015)02-0038-04
张炳文(1984-),男,工程师;从事商用车转向系统研发工作。