基于单/双点线性化的质子交换膜燃料电池发动机温度预测控制研究
2015-08-19周苏翟奇俞林炯高昆鹏
周苏+翟奇+俞林炯+高昆鹏
摘 要:在已有的45 kW级质子交换膜燃料电池(Proton Exchange Membrane Fuel Cell,PEMFC)发动机模型的基础上,将电堆冷却液旁通阀开度、大循环旁通阀开度、水泵转速、风扇开度设定为操控变量,电堆温度设定为输出量,分别设计了单点线性化全工况预测控制(Model Predictive Control,MPC)控制器和两点线性化双MPC控制器,对PEMFC发动机电堆温度进行控制和分析。在相同的仿真环境条件下,分别运行两种控制算法进行仿真运算,并对其结果进行对比分析。仿真试验结果表明,两点线性化双MPC控制的控制效果优于单点线性化全工况MPC控制。
关键词:质子交换膜燃料电池;预测控制;电堆温度;操控变量
中图分类号:TP391.9文献标文献标识码:A文献标DOI:10.3969/j.issn.2095-1469.2015.03.07
现有的PEMFC属于低温燃料电池,其工作温度范围维持在70~80℃。工作温度过高或过低都会影响燃料电池系统性能[1]。当电堆工作温度过低时,电池内各种极化增强,欧姆阻抗变大,导致电池输出电压下降,使电池组整体性能恶化[2-3];温度升高时欧姆阻抗降低,同时减少极化,有利于提高电化学反应速度和质子在膜内的传递速度,电池性能变好;当电堆工作温度过高时,会导致膜脱水,电导率下降,电池性能变差,并且质子交换膜的强度将下降,此时如不及时降温,质子交换膜会被完全破坏。因此,电堆的温度控制对燃料电池系统起着非常关键的作用。
在PEMFC发动机中,通过对冷却系统的控制可以将燃料电池温度维持在最优范围内。由于实际的PEMFC发动机是一个非线性、强耦合、大滞后的系统,因此许多研究者提出了诸如MPC、神经网络控制、模糊PID控制等控制算法对PEMFC发动机进行控制[4-6]。本研究根据PEMFC发动机的系统特点,针对已建立的45 kW级PEMFC发动机系统模型,设计了MPC控制算法对其进行温度控制。文中设计了两种预测控制算法:一是单点线性化,全工况MPC控制;二是两点线性化,双MPC控制。
1 PEMFC发动机温度预测控制模型
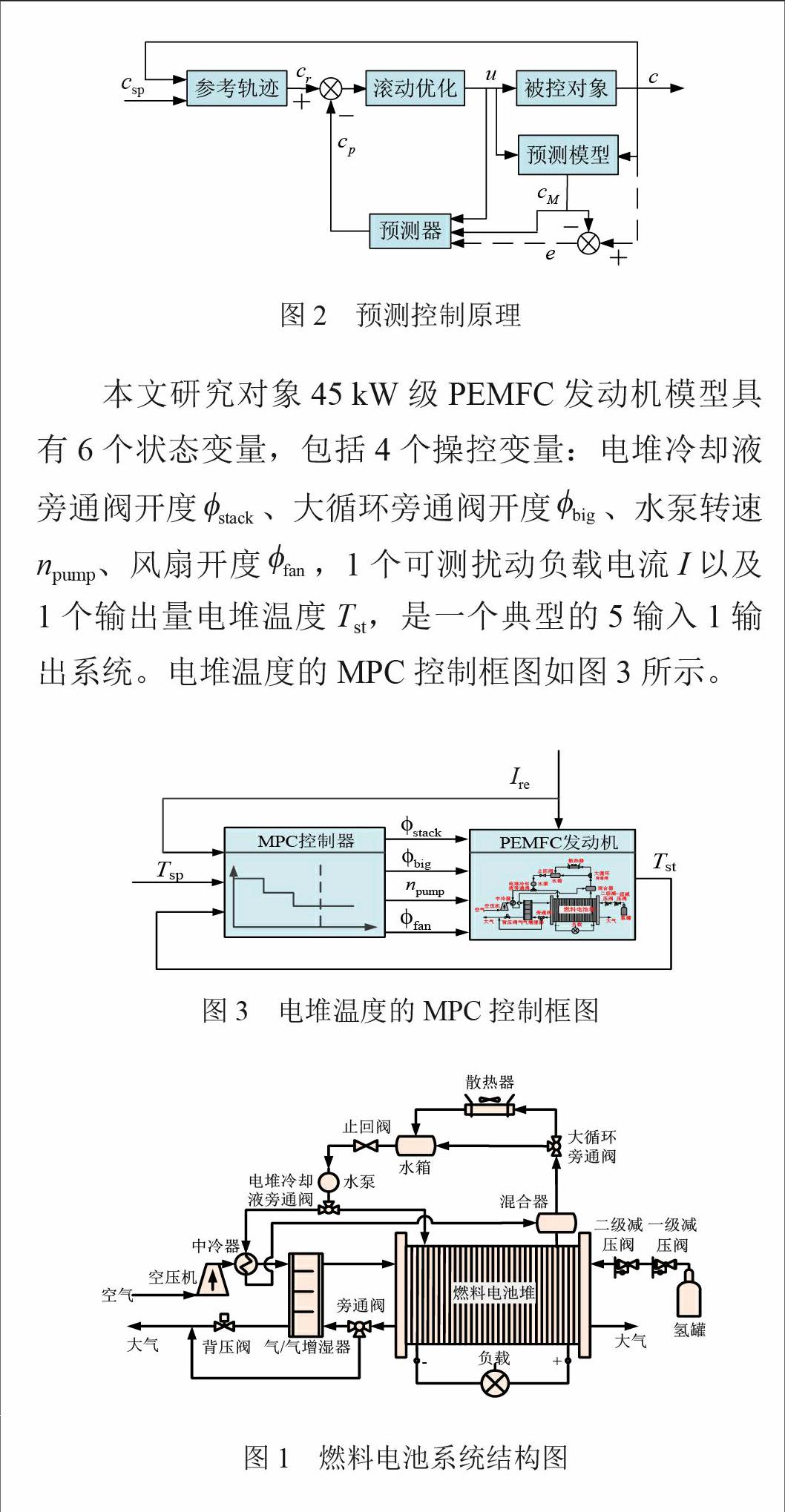
本文研究对象为一个45 kW级PEMFC发动机模型,该模型由燃料电池堆、反应气体供应(包括空气供应和氢气供应)和水热管理4个子系统组成[7],包括冷却液泵、节温器、散热器、中冷器、气/气增湿器和冷管道,PEMFC系统结构如图1所示。空压机出口端的高温高压干燥空气通过中冷器和气/气增湿器后,能够以合适的温度进入燃料电池堆。通过冷却液循环和散热器与环境的热交流,电堆多余的电化学反应热被排出,使电堆温度保持在合适范围内。
预测控制算法具有预测系统未来动态行为的能力,可以提前决定下一时刻要采用的控制序列[8-10],MPC控制基本原理如图2所示[11]。其中,c是系统当前输出;cr是根据csp和c求得的参考轨迹;cM是预测模型的直接输出;cp是经反馈校正后的预测输出,虚线部分将cM与c之间的偏差e反馈给预测器以便进行反馈校正。MPC具有对模型精度要求不高,建模方便,能有效处理多变量、有约束问题的特点[8]。
本文研究对象45 kW级PEMFC发动机模型具有6个状态变量,包括4个操控变量:电堆冷却液旁通阀开度、大循环旁通阀开度、水泵转速npump、风扇开度,1个可测扰动负载电流I以及1个输出量电堆温度Tst,是一个典型的5输入1输出系统。电堆温度的MPC控制框图如图3所示。
PEMFC的温度特性主要由其质子交换膜所决定,按常用的PEMFC所采用的Nafion膜的特性,电堆的工作温度最好控制在70~80℃之间。研究对象45 kW级PEMFC发动机,根据产品设计要求及其本身物理结构特性,从电堆耐久性、湿度控制和安全余量的角度考虑,需将电堆的最优化温度设定为75℃。因此,控制器最终要达到的目的是:无论负载电流如何变化,电堆温度要稳定在75℃左右。为了在较大的负载电流变化范围内控制PEMFC发动机温度,本文针对发动机模型设计了两种温度MPC控制器。
仿真分析在Matlab/Simulink平台上完成,下面的仿真工作都是基于以下仿真环境设定,采用变步长刚性求解器ode23s。在标准状态条件下,环境温度值为25℃,环境压力为101.325 kPa,环境湿度为0.6,空气/氢气过量系数为1.4,阳极入口压力为200 kPa,阴极入口压力为150 kPa。
2 模型线性化
MPC控制器使用的模型通常为线性模型。已知被控对象的非线性解析模型,通过在常用的工作点上对该非线性模型进行泰勒展开,并舍去二阶以上项式,就可获得偏差线性模型,即非线性模型的线性化。
一般情况下,确定性过程系统连续时间动态模型可表示为
。
式中,为过程系统的状态变量;为过程系统的操控变量;为系统的输出变量;f和g分别表示过程系统中状态变量与输入变量(操控变量和扰动),过程系统输出变量与状态变量、输入变量的非线性函数关系。
线性化的前提是确定一个稳态工作点,在工作点()附近对非线性模型展开,得到偏差线性系统:
。
式中,系统矩阵;输入矩阵;输出矩阵;扰动矩阵,矩阵中的元素均与工作点选取有关;为偏导数的算子符号。
选取电堆温度作为输出量,根据模型状态变量及输入变量,得到如下模型:
,
得到PEMFC发动机的线性模型,作为预测模型进行MPC控制器设计。
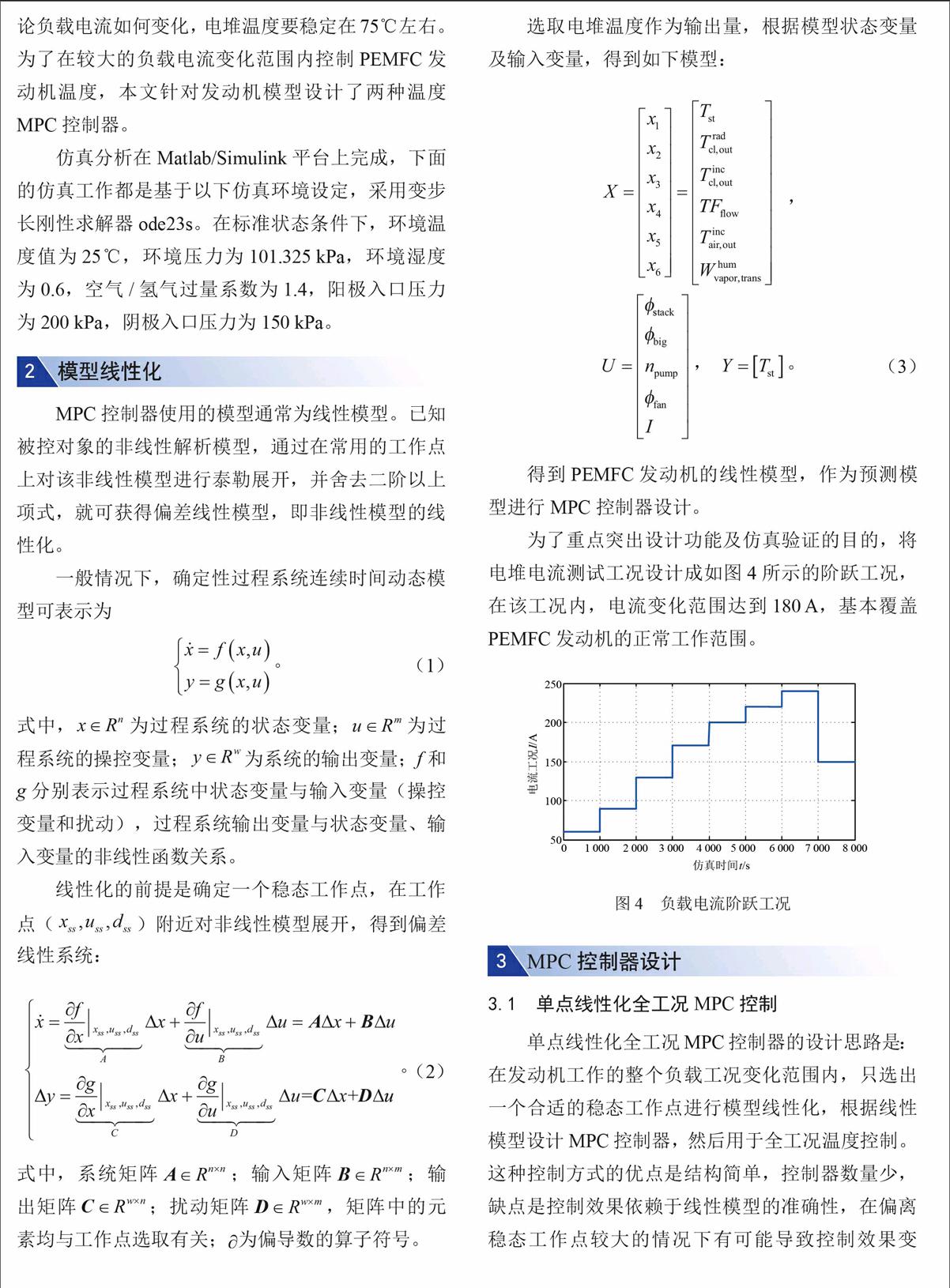
为了重点突出设计功能及仿真验证的目的,将电堆电流测试工况设计成如图4所示的阶跃工况,在该工况内,电流变化范围达到180 A,基本覆盖PEMFC发动机的正常工作范围。
3 MPC控制器设计
3.1 单点线性化全工况MPC控制
单点线性化全工况MPC控制器的设计思路是:在发动机工作的整个负载工况变化范围内,只选出一个合适的稳态工作点进行模型线性化,根据线性模型设计MPC控制器,然后用于全工况温度控制。这种控制方式的优点是结构简单,控制器数量少,缺点是控制效果依赖于线性模型的准确性,在偏离稳态工作点较大的情况下有可能导致控制效果变差,故选取电流测试工况的中间状态值150 A作为负载电流的稳态工作点对模型进行线性化,这样可以避免出现偏离稳态工作点较大的情况。
根据上一节介绍的模型线性化方法,选取如下线性化条件:
。
可以得到如下线性化模型:
根据得到的线性化模型,设计控制器MPC1。在模型中载入该控制器就可进行温度控制仿真。
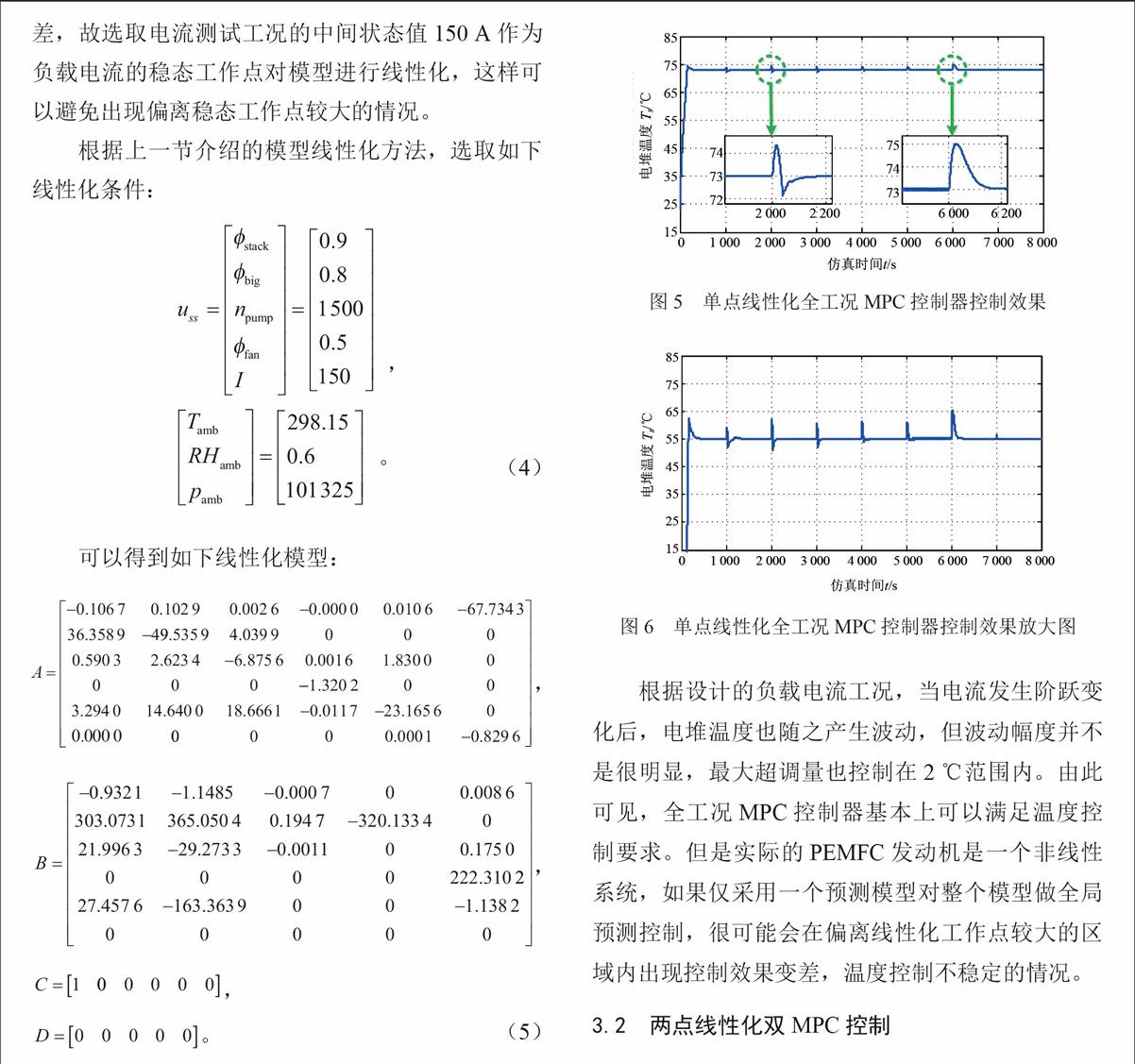
单点线性化全工况MPC控制器控制效果如图5和图6所示。电堆温度刚开始时存在一个2 ℃左右的超调,然后逐渐进入稳态。如图5中局部放大效果图所示,在2 000 s时负载电流从90 A阶跃上升到130 A,此时电堆温度产生了一个大小为1.4 ℃的波动,不过很快就稳定下来;在6 000 s时负载电流从240 A阶跃下降到150 A,电堆温度存在一定的抖动,出现不稳定迹象。从图6控制效果放大图来看此时温度波动幅度最大,不过此时的超调量也仅为2 ℃。
根据设计的负载电流工况,当电流发生阶跃变化后,电堆温度也随之产生波动,但波动幅度并不是很明显,最大超调量也控制在2 ℃范围内。由此可见,全工况MPC控制器基本上可以满足温度控制要求。但是实际的PEMFC发动机是一个非线性系统,如果仅采用一个预测模型对整个模型做全局预测控制,很可能会在偏离线性化工作点较大的区域内出现控制效果变差,温度控制不稳定的情况。
3.2 两点线性化双MPC控制
鉴于单点线性化全工况MPC控制器在控制效果方面存在不理想情况,因此本文设计了第二种预测控制算法:两点线性化双MPC控制。其设计思路为:根据PEMFC发动机的运行工况,选定小负载和大负载两种不同工况,分别选定合适的稳态工作点进行线性化,得到相应的预测模型,然后分别设计控制器,得到两个MPC控制器。
根据设计的负载电流测试工况,电流变化范围为60~240 A,为了得到非线性过程较好的近似效果,将测试工况两等分,拟定60~150 A为模型的小负载运行工况及150~240 A为模型的大负载运行工况。选定小负载运行工况的中间状态值120 A,大负载运行工况中间状态值为180 A为稳定工作点对模型进行线性化。
120 A稳态工作点线性化条件如下:
,
。
得到的线性模型ss3small为
180 A稳态工作点线性化条件如下:
。
得到的线性模型ss3big为
根据以上两个线性模型分别设计控制器MPC3 small和MPC3big,两个控制器的切换以负载电流为条件:当电流大于150 A时选择MPC3big,否则选择MPC3small。
两点线性化双MPC控制器的控制效果如图7和图8所示。从图7中局部放大效果图可以看出,两点线性化双MPC控制的效果较理想,在整个测试工况内,仅在仿真运行到3 000 s和6 000 s控制器进行切换时,电堆温度产生了超调量最大不超过0.4 ℃的波动。从控制效果放大图(图8)来看,在整个电堆温度控制过程中,温度控制曲线较光滑平直,电堆一直处于稳定运行的状态中。
在测试电流超过220 A以后电堆温度出现了轻微的抖动,但是抖动幅度非常小,控制结果非常接近设定值。双MPC控制存在控制器的切换问题,当负载电流变化到150 A控制器发生切换时,如图8所示,此时仍能保证输出温度被控制在设定值范围内,仅存在不到0.4 ℃的微小偏差,而且很快就能达到稳定运行的状态,控制效果较理想。
3.3 两种预测控制算法控制效果对比
上文中已完成了两种预测控制算法的设计,为了直观地比较两种算法的性能,现将两种控制算法的控制效果放在一起进行比较。由图9可知,算法二的控制效果优于算法一的控制效果。
算法一是基于单点线性化的单MPC控制,这种控制算法充分利用了线性预测控制的简易性,但仅在一个平衡点附近展开得到的线性化模型并不能反映非线性系统在大范围测试工况范围内的特性,当变量偏离线性化工作点较大时可能出现控制效果变差甚至不稳定的现象;算法二根据工作范围进行了两点线性化,得到两个线性模型并分别进行控制器设计,两点线性化双MPC控制算法的实质即对模型进行多点线性化,多点线性化后所得到的模型是在各个平衡点处展开的。它虽然只是在局部范围内对非线性过程的近似,但合适的模型切换选择使其应用范围刚好限定在平衡点周围的小范围邻域内,对非线性过程具有更好的近似性。尽管算法二使用了两个控制器,当仿真进行到3 000 s前后,电流跃变过150 A时存在控制器切换的问题,但如图9局部放大效果所示,其控制效果仍比全工况单MPC控制好,可以对非线性过程进行有效的近似。综上所述,其结果表明:多点线性化的预测控制效果优于单点线性化的预测控制。
4 结论
预测控制算法是一种基于模型的新型计算机控制算法,在工业过程控制中得到广泛应用。本文设计了两种预测控制算法用于45 kW级PEMFC发动机模型的温度控制,分别是单点线性化全工况MPC控制和两点线性化双MPC控制。针对这两种控制算法分别设计了控制器,对其控制效果进行了仿真测试并对结果进行了分析,然后将两种控制器的仿真结果合并在一起对其控制效果进行了比较,由于多点线性化对非线性过程有更好的近似性,结果表明两点线性化双MPC控制效果优于单点线性化全工况MPC控制。
参考文献(References):
JAMES L,ANDREW D. Fuel Cell Systems Explained [M]. Chichster,USA:John Wiley & Sons Ltd,2003:14-24.
GOLBERT J,LEWIN D R. Model-Based Control of Fuel Cells:Regulatory Control [J]. Journal of Power Sources,2004,135(2):135-151.
卫东,褚磊民,郑东. 空冷型PEMFC电池温度特性及模糊PID融合控制 [J]. 电源技术研究与设计,2010, 34(4):342-345.
Wei Dong,Chu Leimin,Zheng Dong. Temperature Characteristic and Fuzzy-PID Fusion Control for Air-Cooling PEMFC Stack [J]. Power Technology Research and Design,2010,34(4):342-345.(in Chinese)
Li Xi,Deng Zhonghua,Wei Dong,et al. Parameter Optimization of Thermal-Model-Oriented Control Law for PEMFC Stack Via Novel Genetic Algorihm [J]. Energy Conversion and Management,2011,52(11):3290-3300.
COZZOLINO R,CICCONARDI S P,GALLONI E,et al. Theoretical and Experimental Investigations on Thermal Management of a PEMFC Stack [J]. International Journal of Hydrogen Energy,2011,36(13):8030-8037.
Hu Peng,Cao Guangyi,Zhu Xinjian,et al. Coolant Circuit Modeling and Temperature Fuzzy Control of Proton Exchange Membrane Fuel Cells [J]. International Journal of Hydrogen Energy,2010,35(17):9110-9123.
高昆鹏,章桐,黄晨东,等. 45 kW质子交换膜燃料电池发动机建模与仿真[J]. 同济大学学报(自然科学版), 2013,41(2):264-270.
Gao Kunpeng,Zhang Tong,Huang Chendong,et al. Modeling and Simulation of a 45 kW Proton Exchange Membrane Fuel Cell Engine [J]. Journal of Tongji Univer-sity(Natural Science Edition),2013,41(2): 264-270.(in Chinese)
田玉冬,朱新坚,曹广益. 基于预测控制的燃料电池温度控制系统的建模[J]. 移动电源与车辆,2003(4):25-27.
Tian Yudong,Zhu Xinjian,Cao Guangyi. Modeling of Predictive Control Based Temperature Control System of Fuel Cells [J]. Movable Power Station and Vehicle, 2003(4):25-27.(in Chinese)
徐祖华. 模型预测控制理论及应用研究[D]. 杭州:浙江大学,2004.
Xu Zuhua. Research on Theory and Applications of Model Predictive Control [D]. Hangzhou:Zhejiang University, 2004.(in Chinese)
岳雅. 非线性预测控制研究及其仿真 [D]. 西安:西安科技大学,2008.
Yue Ya. Research on Nonlinear Predictive Control and Its Simulation [D]. Xi'an:Xi'an University of Science and Technolgy,2008.(in Chinese)
刘斌. 非线性系统建模及预测控制若干问题研究 [D].杭州:浙江大学,2004.
Liu Bin. A Study on Nonlinear System Modeling and Predictive Control [D]. Hangzhou:Zhejiang University, 2004.(in Chinese)