Cloud Control Systems
2015-08-09YuanqingXia
Yuanqing Xia
Cloud Control Systems
Yuanqing Xia
—The concept of cloud control systems is discussed in this paper,which is an extension of networked control systems (NCSs).With the development of internet of things(IOT),the technology of NCSs has played a key role in IOT.At the same time,cloud computing is developed rapidly,which provides a perfect platform for big data processing,controller design and performance assessment.The research on cloud control systems will give new contribution to the control theory and applications in the near future.
Index Terms—Cloud control systems(NCSs),networked control systems,cloud computing,cyber-physical systems(CPSs),big data.
I.INTRODUCTION
IN the last decade,network technology has dramatically been developed.Recently,more and more network technologies have been applied to control systems[1-2].This kind of control systems in which a control loop is closed via communication channel is called networked control systems (NCSs),which produces a new area in control theory.Generally speaking,NCSs allow remote monitoring and adjustment of plants over the communication channel,for example the Internet in Internet-based control systems,which make the control systems bene fi t from the ways of retrieving data and reacting to plant fl uctuations from anywhere around the world at any time.The typical NCS is shown in Fig.1.In NCSs,the plant,controller,sensor,actuator and reference command are connected through a network.Many applications have been carried out in practice and considerable studies on the design and analysis of NCSs can be seen in[3-7]and the reference therein.
In recent years,the techniques of internet of things(IOT) are also developed very rapidly,while the research of NCSs plays a key role in this area.Roughly speaking,IOT draws on the functionality offered by all of these technologies to realize the vision of a fully interactive and responsive network environment.Fig.2 gives the possible applications.In general, for the control of IOT,the collection and processing of data are very important.First,it is dif fi cult even impossible for the designer to get the accurate physical models of all objects in IOT.
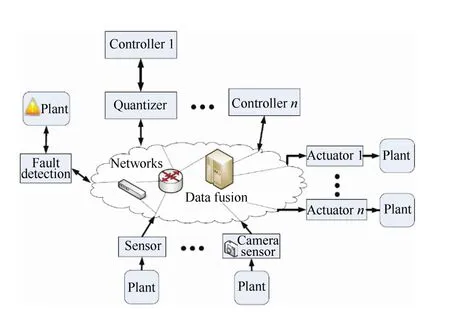
Fig.1.Networked control systems.
The only thing we know about the objects in IOT is the data,i.e.,various measurements.Secondly,due to the sensor technology,one can detect the changes in the physical status of things.Thus,big data about things will be collected and then stored.However,the development of computer science, especially in the aspects of computing ability and storage together with high quality and reliable measurements from process instruments,also make it possible to collect and process the data ef fi ciently.Finally,all the objects and devices in IOT are usually connected to some large databases and networks(indeed to the network of networks,e.g.,the Internet).Information and commands need to be transmitted through those networks,where the communicated information may suffer intermittent losses or delays,band width constraints,asynchronization and other unpredictable factors. These limitations will fi nally deteriorate the performance and even make the closed-loop system unstable.In recent years, many effective control theories and applications have been proposed with the development of IOT.

Fig.2.Internet of things.
Note that with the emergence of IOT,the captured data will grow in size.The control systems have to deal with the“big data”from the ubiquitous information sensing mobile devices,cameras,microphones,radio-frequency identi fi cation readers,and wireless sensor networks,etc.In this case,the requirements of high-quality and real-time of control will exceed the ability of the traditional networked control topology,because the big data in control system will increase the network communication burden and computational burden.To overcome the problem,a new concept called cloud control system is investigated,which combines the merits of networked control and the cloud computing technology.In this new control topology,the real-time of control can be guaranteed due to the introduction of cloud computing,while the control quality can be improved by using the on-hand networked control schemes,e.g.,networked predictive control, data-driven control,etc.Compared with the traditional NCSs, the cloud control system has the following advantages:1)It can integrate all kinds of resources well,and make them be more fully utilized;2)Improve the ef fi ciency of the system;3) Increase system reliability;4)Save more energy,etc.However, the cloud control system also faces many challenges at current stage.First,there exists big data in cloud control system, how to ef fi ciently recognize,process and transfer those data is a problem.Secondly,the cloud service provider often serves multiple clients simultaneously,in this process,how to guarantee the real-time control is also a challenge.In addition, in the cloud control system,another problem is that how to guarantee the control quality and stability of the closedloop system under the big time delays,which mainly include the service time,and the communication delays between the plant and the cloud controller.Last but not the least,the huge economic cost for cloud service at present stage is also a considerable problem.To solve this problem,a new concept from the point of view of cooperative cloud control is proposed.However,in the cooperative cloud control system, the reasonable allocation for control tasks is a huge challenge.
The remainder of the paper is organized as follows.Firstly, as an important theoretical foundation,a brief overview of NCS and its application is given,which includes model-based NCS,data-driven NCS,networked multi-agents system and control of complex system.Then,a rudiment of cloud control systems is proposed.As an important extension,the framework of cooperative cloud control is also discussed at last.
II.MODEL-BASED NETWORKED CONTROL SYSTEMS
First,fruitful research results on NCSs are model-based, especially,on linear time invariant systems.More generally, consider the following discrete dynamic systemS:

wherex(k)is the system state,u(k)is the system input,y(k) is the system output,x(k),u(k)andy(k)are with suitable finite dimensions;f(x(k),u(k),w(k))andg(x(k),u(k),v(k)) give the plant′s dynamic and the output,respectively,which can be linear or nonlinear.w(k)is the unknown process disturbance andv(k)is the unknown measurement noise.
Many methods have been proposed to solve the problems related to NCSs.It has been proven that networked predictive method is very effective for NCSs with network-induced time delays and data dropouts[1-2].Fig.3 shows the designed feedback control scheme for system(1)-(2).It is worth noting that,to make the measurements be processed in sequence,a buffer is set at the controller node.On the other hand,the controller node can obtain the estimated states and predictive states by using Kalman fi lter:
whereN1is the fi nite horizon,KFrepresents the compact form of Kalman fi lter expression,K(k+i)is time-varying Kalman fi lter gain[2].Given that the unknown network transmission delays inevitably exist in both the forward(from controller to actuator)channel(CAC)and feedback(from sensor to controller)channel(SCC),a networked predictive control scheme is proposed,which mainly consists of the control prediction generator and the network delay compensator.The former is designed here to generate a set of future control predictions,while the later is used to compensate for the unknown random network delays.Given that the network can transmit a set of data at the same time,it is assumed that the predictive control sequence at timekis packed and then sent to the plant side through a network.Then,the compensator will choose the latest control value from these control sequences available on the plant side.
For example,when the time delays in SCC and in CAC are 0 andki,respectively,the following predictive control sequences are received on the plant side:
where the control sequencesut|t-ki,i=1,2,···,t,are available to be chosen as the control input of the plant at timet.The output of the network delay compensator,i.e.,the input of the actuator will be

In fact,by using the networked predictive control scheme presented in this section,the control performance of the closed-loop system with network delay is very similar to that of the closed-loop system without network delay.
The controller sends packets to the plant:


Fig.3.Model based networked control systems.
At time instantk,the actuator chooses a preferable control signal as the actual input of the controlled dynamic system:

wherei=argmini{u(k|k-i)is available}.
More detailed stability proof and idea can be found in [1-2].
III.DATA-DRIVEN NETWORKED CONTROL SYSTEMS DESIGN
Under traditional control design frameworks,the dynamics are the prerequisite of control and monitoring,therefore,the state or the output measurements from the plant are often used to build these models.Once the design of a controller or a monitor is completed,the model will cease to exist. However,the use of models in this framework will inevitably introduce modeling error as well as complexity in building the model.Speci fi cally,with the emergence of IOT,big data has to be processed,the control complexity of traditional control scheme will continue to increase.To overcome these problems, the data-driven scheme is developed,which has been applied successfully in industrial process control fi eld as well as in complex systems.Given that only digital data is transmitted through the network and received by controller as well as the actuator,the data-driven method is particularly suitable for NCSs.
In sequel,we will introduce the notion of data-driven NCS. The typical diagram of data-driven NCSs is shown in Fig.4. In such control system,the subspace projection method is applied to generate the predictive control signals.In general, the only difference between data-driven NCSs and modelbased control systems is the controller.In data-driven NCSs, when the controller receives the data including past input and past output from the sensors over network,the data-driven predictive control algorithm described as the above will be applied to generate a sequence of predictive control inputs. Then those control sequences will be transmitted to a buffer at the actuator side over network.Finally,according to the predictive networked control scheme described in(8)-(9),the compensator will choose the right control input.From the description the data-driven networked control scheme can be obtained directly without modelling,it is obviously different from the model-based one in[8].

Fig.4.Data-driven networked control systems.
Some experiments have shown the effectiveness of the proposed algorithm,however,there still exist many questions in this new fi eld,for example,how to distinguish linear systems and nonlinear systems based on the received data under the data-driven control scheme?How to analyze the stability of data-driven based nonlinear systems?If the data drop or time-delay occurs,how to compute the subspace objection with intermittent observations?More details about data-driven predictive NCSs can be found in our recent publication[9].
IV.NETWORKED MULTI-AGENT SYSTEMS
At the beginning of research on NCSs,more attention was paid on single plant through network.Recently,fruitful research results on multi-plant,especially,on multi-agent NCSs have been obtained,which focused on the design of more general models,where each agent has its own distinct nonlinear dynamics that are unknown to the other agents[10]. Agents in networks update their states based on information exchange among them.As is shown in Fig.5,there are many interesting problems for networked multi-agent systems, for example,aggregation,clustering,coordination,consensus, formation,synchronization,evolution and swarm.If each agent runs in a common state,then the multi-agent system achieves consensus.Consensus problems have a long history in computer science and form the foundation of the fi eld of distributed computing and control[11].Consensus protocols are distributed control policies based on neighbors state feedback that allow the coordination of multi-agent systems.According to the usual meaning of consensus,the system state components must converge,in fi nite time or asymptotically,to an equilibrium point where they all have the same value lying somewhere between the minimum and maximum of their initial values.In recent years,there have been a tremendous amount of research on the consensus problem,and many interesting results have been obtained[12-13].
On the other hand,formation control problem for a group of agents is a popular research topic in decentralized control[14]. Formation control of multiple robots,spacecrafts and unmanned air vehicles,mobile autonomous agents are oftentreated as rigid bodies or mass points.Formation control of multiple autonomous vehicles has recently received an increasing interest in the control community.This interest is motivated by their potential applications in areas such as search and rescue missions,reconnaissance operations,forest fi re detection,surveillance and multi-missiles attack[15].Work in this area is generally inspired by the recent results in the coordinated control of multi-agent systems[16].The leaderfollower method uses several agents as leaders and others as followers,while the behavior based approach and the virtual structure approach are often used to perform the coordination.

Fig.5.Control of multi-agent systems.
Coordination control is an active research area at present and has more practical meaning[17].For example,when we eat food,our eyes help in locating the food,our nose senses the food,our hands bring the food to our mouth and our jaw muscles help the teeth to chew the food.All these activities occur in a coordinated manner,and if any of these activities misses or does not occur in time then the body will not get nutrition.Now,more researchers are devoted to multirobot systems which can be used to increase the system effectiveness.That is,with respect to a single autonomous robot or to a team of non cooperating robots,multi-robot systems can better perform a mission in terms of time and quality,and can achieve tasks not executable by a single robot(e.g.,moving a large object)or can take advantages of distributed sensing and actuation.
With the development of softwares,hardwares and other advanced techniques in multi-agent systems,a system of collaborating computational elements controlling physical entities has come into practice,that is,cyber-physical systems (CPSs)as shown in Fig.6,which interface physics-based and digital world models.Currently,the research on CPS aims to integrate physical and computational models in a manner that outperforms a system in which the two models are kept separate[18].In the context of the feedback control system, objectives of the physical system(e.g.,disturbance rejection, tracking accuracy,etc.)are translated to computing actuator commands that minimize errors between reference and actual trajectories through physical space.
V.CONTROL OF COMPLEX SYSTEMS
Up to now,there is no uni fi ed understanding for complex systems both on the precise de fi nition of complexity and on the basic intuition behind the concept.From different points of view,there are many de fi nitions of complex systems,for example,a complex system refers to a system composed of interconnected parts that as a whole exhibit one or more properties(behavior among the possible properties) not obvious from the properties of the individual parts[19]. In[20],the complex systems are considered as natural or social systems which are composed of a large number of nonlinear modules.Loosely speaking,the complex systems require large,messy models that are dif fi cult to formulate and uncertain in their status,which is one of the main features of complex systems.Other features also include nonlinearity and complexity of component itself,strong coupling between components,coexistence of positive and negative feedback, etc.The complex system may be open.They may interchange information or mass with environment,and during the process, they can modify their internal structure and patterns of activity in a way of self-organization,which cause such systems to be fl exible and easily adapt to variable external conditions. However,for the complex system,the most signi fi cant feature is that one can not derive or predict solely from the knowledge of such systems’structure and the interactions between their individual elements.Thus,for the same system,one often needs to provide the parallel descriptions on different levels of its organization.A few of the most characteristic properties of the structure and behavior of the systems which are commonly referred to as complex are reviewed in the same paper,i.e., power law,self-organization,coexistence of collective effects and noise,variability and adaptability,hierarchical structure, scale invariance,self-organized criticality,and highly optimized tolerance.

Fig.6.Cyber-physical system.
Fig.7 shows the composition of complex systems.As shown in fi gure,many practical systems can be modeled as complex systems,for example,climate system,ant colonies,human economies and social structures,and even living things,including human beings,as well as modern energy or telecommunication infrastructures,etc.In addition,multi-agent networked control systems can also be viewed as one simple kind of complex systems,where each agent is an element of the complex systems.
However,at the current stage,it is still a huge challenge to apply directly existing stability theory to present an analysis of stability and instability for such complex systems.Generally speaking,the existing methods are limited to feedback control which have been implemented to regulate local and global behavior,and it is awkward to apply them directly to deal with complex systems,especially the interconnected systems. It is well known that Lyapunov based stability theory andits many extensions have been successfully applied to many kinds of systems such as continuous,discrete,impulsive, hybrid and time-delay systems.The emphasis has been on so-called closed systems.An alternative view has been taken in engineering science,where the emphasis is the responses of the in fl uence of many externalities such as inputs,disturbances and interconnections.This view treats systems as open with inputs and outputs.Lyapunov theory is also included in this approach,but functional analysis where all the inputs,outputs and other signals live in extended function spaces.It has been reviewed in the systems and control community that there are unful fi lled theoretical opportunities in the open systems for mathematicians and physicists[21].
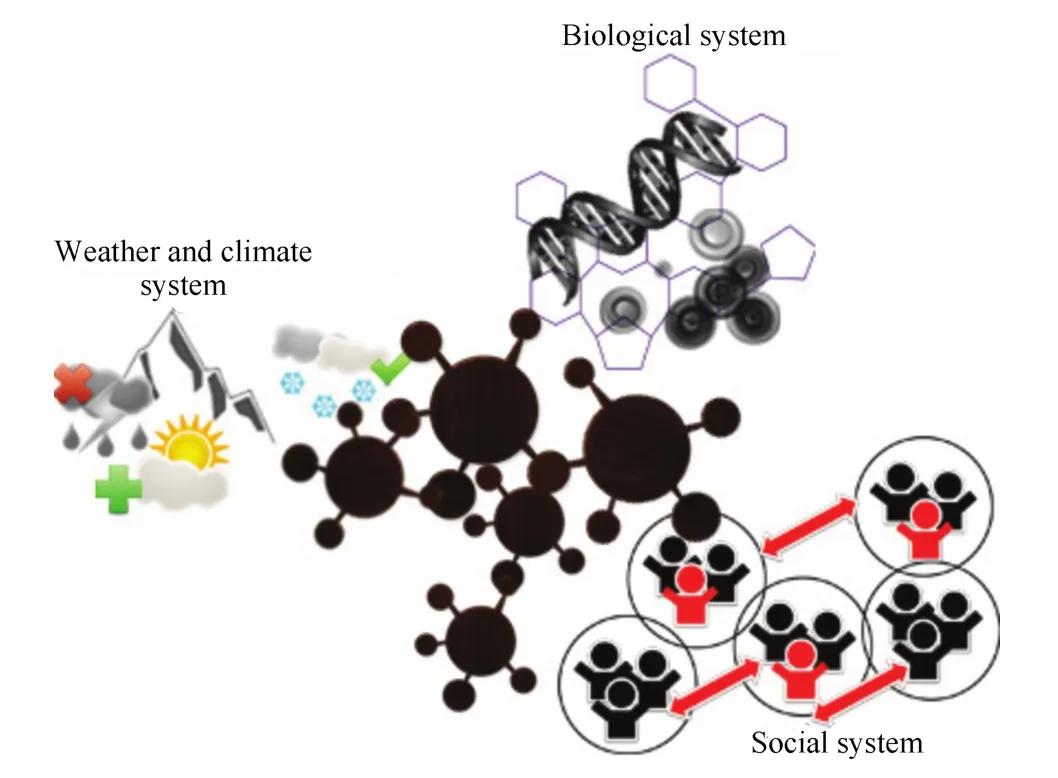
Fig.7.Complex systems.
The techniques of stability analysis related to Lyapunov theory,or called energy-function methods in other words,have been well developed and can give regions of synchrony after disturbances and so change the control rules,and transfer limits and so in fl uence economic performance[22].This kind of development appears to be needed for larger classes of complex systems.A further approach,that is developed in electrical engineering as an extension of operator methods in circuit theory,uses functional analysis methods to make statements about input-output behavior[23].The more rigorous recent results on complex systems mainly use Lyapunov theory (for example,see[24-25]).However,there are also a lot of phenomena in complex systems which can not be analyzed or proven by Lyapunov theory.
VI.CLOUD CONTROL SYSTEMS
Initially,the concept of cloud control systems was an alternative rock band originating from the Blue Mountains near Sydney,Australia.This paper also adopts this name for a new kind of control perspective[26].As we know that most of complex systems cannot be controlled properly,since we know little about them and are lack of powerful tools to control this kind of systems.The development of new technologies, especially,magical innovations in softwares as well as hardware,provides necessary conditions to fasten computability and distributed computing.Together with development of network,cloud computing has come into our life.Nowadays, cloud computing has exceeded the original product concept, and more often,it means a service.Generally speaking,it is a byproduct of the ease-of-access to remote computing sites provided by the Internet[27]which describes a new supplement,consumption,and delivery model for IT services based on Internet protocols.It often includes the provisioning of dynamically scalable and the virtualized resources[28-29]. In practical systems,the cloud computing system provides a shared pool of con fi gurable resources,which include computation,software,data access,and storage services etc.,wherein end-users consume power without requiring to know that the physical location and con fi guration of the service provider[30]. The computers and other devices in such system are as a utility over the network which can share resources,software and information etc,such that the users can access and use through a web browser as if the programs were installed locally on their own computers[31].
Due to the cloud control systems combine the merits of cloud computing,advanced theory of NCSs and other recently developed related results,it will exhibit unbelievable potential applications in industrial sector and other related areas.Fig.8 shows the structure of cloud control systems.

Fig.8.Cloud control systems.
In practical cloud control system,as the scale of the system increases,the captured information which includes ubiquitous information-sensing mobile devices,aerial sensory technologies(remote sensing),software logs,cameras,microphones, radio-frequency identi fi cation readers,and wireless sensor networks will grow in size[32].To name this kind of data,a new concept is emerging,“Big data”[33],which is a collection of data sets.However,the set is so large and complex that it is dif fi cult to be processed with the help of any on-hand traditional database management or processing tools.From the stochastic point of view,when there are suf fi cient data, some useful deterministic conclusions can be achieved based on Law of Large Numbers,while single data or a few data are quite random.However,many challenges are still existing, which include capturing,storage,search,sharing,transfer, analysis,and visualization of the big data.In cloud control systems,big data will be sent out to the systems of cloud computing,after the data being processed,control signal,such as schedule schemes,predictive control sequences and other useful information will be generated instantly for cloud control systems.Cloud control systems will provide us powerful toolsto control the complex systems which we could not imagine before.
A.A rudiment of Cloud Control Systems
In this section,we present a rudiment of classical cloud control systems to supply a platform for researchers who are interested in this topic.The basic assumptions in this rudiment are as follows:
Assumption 1.A broadcast domain is involved in this rudiment,in which all nodes can reach each other by broadcast at the data link layer.
Assumption 2.All nodes in the broadcast domain mentioned above are intelligent enough to undertake the cloud control task,but their computation abilities are assumed to be equal to each other,and the available computation resources change unpredictively.
Assumption 3.The network delivery is not ideal,bounded time delays and data delivery dropout could occur during any transmission.
Assumption 4.The network delivery time delays and dropout statistics between any two particular nodes could be obtained by the same nodes in some ways.
Assumption 5.The controlled object,i.e.,any physical plant,is located at a nodeP.The cloud control task starts from a controller located at a nodeCT,and in the meantime the nodeCTis also the cloud control task management node.
Though the controlled plantPcould be any type of equipment,it is assumed to be linear discrete time dynamic system to easily ascertain the stability of the proposed cloud control system by employing the existing NCS knowledge. The actuator and the sensor work in time-driven mode with the same step timeT.The rudiment of the cloud control systems proposed is divided into two phases:initial phase(NCS phase) and cloud control phase.
The cloud control task starts from the initial phase,in this phase the control system is initialized as a NCS,which involves controllerCTand the controlled plantP.The networked control scheme applied by controllerCTcould be arbitrary for this cloud control rudiment,but it is assumed here to be the same as the method mentioned in Section II, since this method is easy to be extended from NCSs to cloud control systems and the stability keeps being satis fi ed after the extension.The controllerCTreceives measured outputs from the plantP,and generates the manipulated variable sets according to the model based predictive control algorithm.A compensator is set at the plant nodePto cancel the networkinduced time delays.During the initial phase,the cloud control system only involves two nodes in the prede fi ned broadcast domain and it is actually a NCS.
After the initial phase is well maintained,the system switches to the second phase,i.e.,the cloud control phase. In this phase,the nodeCTis not only a controller but also a task management node.NodeCTstarts to keep broadcasting a requirement over the domain at a prede fi ned frequency.All nodes in this broadcast domain can receive this requirement. The requirement has to include but not limited to the following information:
1)The IP address of the plant nodeP;
2)The control algorithm applied and its corresponding parameters;
3)The mathematical model of the plant;
4)Computation burden estimated.
During the beginning period of the cloud control phase, theCTnode undertakes two tasks,one of them is to apply the prede fi ned control algorithm,generate the manipulated variables,and then send encapsulated predictive control signals to the nodeP;the other task is to keep broadcasting the requirement over the domain.It should be noticed that the fi rst task,i.e.,control task,is not permanent for nodeCT,the reason of broadcasting the requirement for nodeCTis to fi nd“suitable successors”to undertake the control task instead of itself.
Once a node,for example let it beCi,has enough computation resource or it is powerful enough to undertake both its current local computation and the potential cloud control task after it receives the requirement from the nodeCT,it responds to the nodeCTwith an acknowledgement.In a similar fashion,the acknowledgement includes but not limited to the following information:
1)The network-induced time delays and data dropout statistics between the nodeCiand the nodeP(bounded time delayNiand the maximum consecutive data package dropoutDi, for example);
2)Computation capability available(may be quantized to positive numbersCCAi).
After the acknowledgement ofCiarrives at the nodeCT, the nodeCTwill evaluate the superiority of nodeCi.The superiority mentioned here is assumed to be a weighed sum function of the delivery time delays statisticNi,the maximum consecutive data package dropoutDiand computation capability availableCCAi,
where d is the thickness and Tn is the film transmittance in this region.

whereSidenotes the superiority of nodeCi,functionsf(·) andg(·)are monotonically decreasing,and functionh(·)is monotonically increasing.The positive weight coef fi cientsα,βandγshould be designed according to the engineering practice.The greater the superiority is,the more suitable the nodeCiis.In the meantime,the nodeCTalso has the knowledge of the superiority of itself,SCT.The nodeCTmaintains a list of willing nodes whose superiorities are greater than itself,i.e.,any nodejthat sent acknowledgement to nodeCTifSj>SCT.Those nodes whose superiorities are not greater thanSCTare ignored.The list of willing nodes is shown in Table I,where the length of the list,kCT,is dynamic, it depends on how many available willing nodes exist.All willing nodes are ranked in the list,and the nodeCTis the last since its superiority is the smallest among all the willing nodes.If there are no willing node available,nodeCTcould be the fi rst one,and the length of the list is one.It is advisable to set a maximum length of list,kMAX,to avoid unnecessary memory space cost and computation burden.If there are too many willing nodes available,nodeCTonly contains the fi rstkMAX-1 nodes and abandons others.
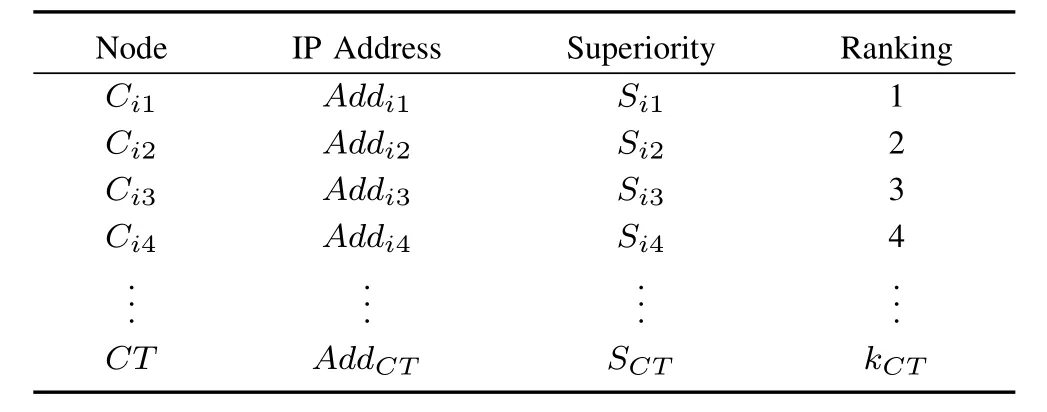
TABLE I THE LIST OF WILLING NODES
The next step for nodeCTis to choose some successors from the listed candidates.The number of successors,lMAX, is prede fi ned.NodeCTchooses the fi rstlMAXnodes as the cloud controllers for nodeP.If the number of the listed candidates is smaller thanlMAX,nodeCTcould use all available willing nodes as the cloud controllers.As shown in Fig.9,the yellow node is nodeCTand the blue one is nodeP.In this snap,there are fi ve available willing nodes,Ci1-Ci5,and thelMAXis de fi ned as three,so we use red color to denote the cloud control nodesCi1-Ci3,and green color to denote the inactive willing nodesCi4-Ci5.
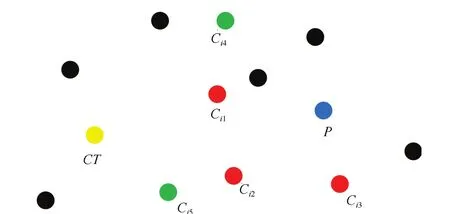
Fig.9.The schematic diagram of the cloud control system.
After the cloud controllers are con fi rmed,nodeCTdelivers a control statement to the cloud controllers,this statement includes the detailed controller states as follows:
1)The mathematical model of the plant;
2)The estimated states of plant and manipulated variables up to the current time instant;
3)The controller parameters.
As mentioned above,the Kalman fi lter based predictive control method introduced in Section 2 could be applied in this rudiment.The second item in the statement could be as follows:
To maintain the cloud control system works well,all active cloud control nodes send feedback to the nodeCTat every sampling time instant,if nodeCThas not received the feedback of a particular cloud control node in a prede fi ned duration,this cloud control node should be removed from the list,and nodeCTwill indicate the fi rst node among all the inactive willing nodes to substitute the position of the removed node.At the same time,nodePis informed about this substitution.The management of the proposed cloud control system is a dynamic process,nodeCTkeeps on seeking willing nodes,removing inactive nodes and exchanging information of current cloud control nodes to nodeP.NodePcould receive multiple manipulated variables packets from different cloud control nodes,the compensator chooses the newest one as the actual input for the controlled object.The classical control fl ow diagram of cloud control system is shown in Fig.10,in whichC2,C3andC6are the cloud control nodes,whileC6is the active cloud control node at the current stage.
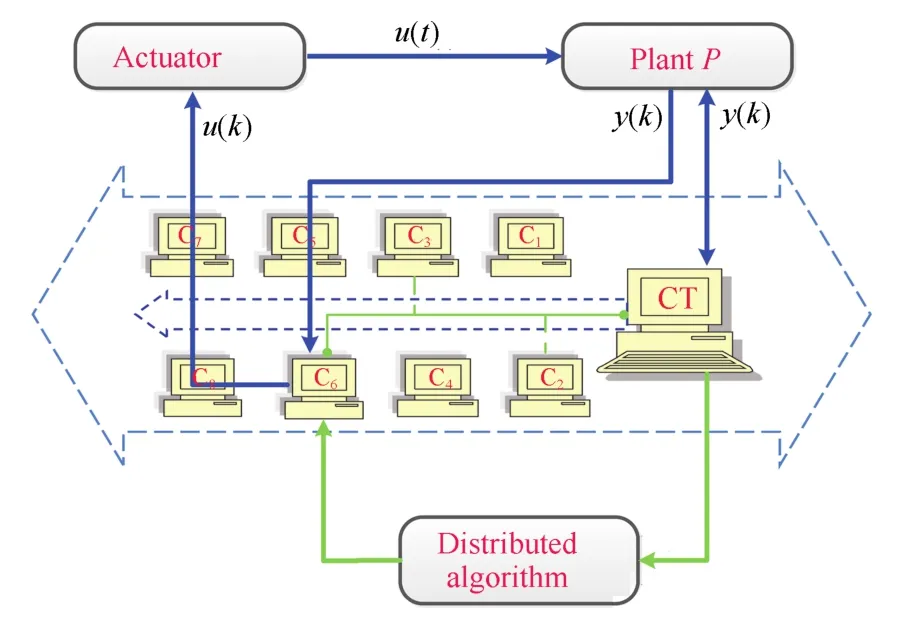
Fig.10.The control fl ow diagram of cloud control system.
B.Cooperative Cloud Control
In practical cloud control system,most of the big cloud infrastructure/services is often provided by the enterprises, which include Amazon,Salesforce,Google,and Microsoft, etc.In general,the end-users have to pay a high amount of money for that.For most end-users,they are more inclined to get low-cost services,which is one of the original intention of the cloud control industry.However,in such system,the single cloud controller lacks in having enough computing resource or enough computing power due to the limited fi nances.It thus presents the cooperative cloud control theory,which remains the advantages of the cloud control with a lower cost.
The principle of cooperative cloud control system is similar to the classic cloud control,which,however,has the following difference:the control task will be completed by multiple (two or more)cloud controllers in a form of cooperation, as shown in Fig.11.Generally speaking,CTis not only a controller but also a task management server,whileC1–C8are the cloud controllers with the same step time,which have the same de fi nition as those in the cloud control system in Fig.10. At the beginning of the task,theCTnode has to select the multiple suitable cloud controllers from the listed candidates according to the scale of the task,for example,C2,C3,C6, and then using the distributed algorithm,CTwill assign part of the total task to each cloud controller based on its current computation resource.At the same time,nodeCTwill alsosend a copy of the current cloud control nodes list to the plant nodeP.Then,the plantPstarts to send its measurements and also the historical measurements to the cloud control nodes, for example,C2,C3,C6.After that,at each step time,every cloud controller will send feedback toCT,and at the same time,CTwill give the most new control signal according to the current task assign algorithm,which will be sent to the actuator.It is worth noting that,at every sampling time instant, both the active cloud controllers and the candidates also need to send their status to serverCT,which includes the current computation resources.Then,CTwill make a new candidate list.To maintain the cloud control system works well,theCTwill also reassign the task according to the newest state of the cloud nodes at the next sampling time.For the cooperative cloud control system,other technical detail is similar to typical cloud control system as described in above subsection,and here we omit it.
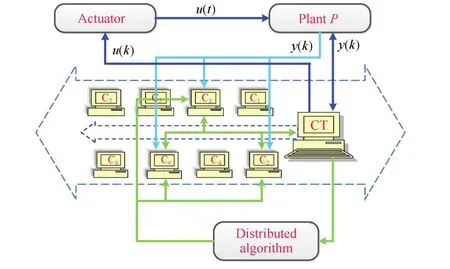
Fig.11.The framework of cooperative cloud control system.
The rudiment of the cloud control systems proposed above supplies a simple platform,in which researchers can develop or test their new algorithms about cloud control systems theoretically.Although we did not consider many potential features of cloud control systems in this rudiment,it indeed involves the most basic principle of the cloud control systems, taking advantage of the available computation resources and the superiorities in topology of all possible nodes to ful fi ll the given control task.
VII.CONCLUSION
A brief overview of NCSs has been given and new trends in NCSs have also been pointed out.With the development of cloud computing and the processing techniques of big data,the dawn of cloud control systems will emerge soon.A preliminary structure and algorithm are proposed in this paper. Some new results on cloud control systems will be found in our future publications.We believe that there will be more interesting and important results which will be produced in this new research area.
REFERENCES
[1]Xia Y Q,Fu M Y,Shi P.Analysis and Synthesis of Dynamical Systems with Time-delays.Berlin,Heidelberg:Springer,2009.
[2]Xia Y Q,Fu M Y,Liu G P.Analysis and Synthesis of Networked Control Systems.Berlin,Heidelberg:Springer,2011.
[3]Park H S,Kim Y H,Kim D S,Kwon W H.A scheduling method for network based control systems.IEEE Transactions on Control Systems Technology,2002,10(3):318-330
[4]Zhivoglyadov P V,Middleton R H.Networked control design for linear systems.Automatica,2003,39(4):743-750
[5]Yue D,Han Q L,Peng C.State feedback controller design of networked control systems.IEEE Transactions on Circuits and Systems,II:Express Briefs,2004,51(11):640-644
[6]Gao H,Chen T.A new approach to quantized feedback control systems.Automatica,2008,44(2):534-542
[7]Gao H,Chen T.Network-basedH∞output tracking control.IEEE Transactions on Automatic Control,2008,53(3):655-667
[8]Xia Y Q,Liu G P,Fu M Y,Rees D.Predictive control of networked systems with random delay and data dropout.IET Control Theory&Applications,2008,3(11):1476-1486
[9]Xia Y Q,Xie W,Liu B,Wang X Y.Data-driven predictive control for networked control systems.Information Science,2013,235(20):45-54
[10]Saber R O,Fax J A,Murray R M.Consensus and cooperation in networked multi-agent systems.Proceedings of the IEEE,2007,95(1): 215-233
[11]Yan G,Wang L,Xie G,Wu B.Consensus of multi-agent systems based on sampled-data control.International Journal of Control,2009,82(12): 2193-2105
[12]Meng D,Jia Y.Finite-time consensus for multi-agent systems via terminal feedback iterative learning.IET Control Theory&Applications, 2011,5(18):2098-2110
[13]Ren W,Beard R W,Atkins E M.A survey of consensus problems in multi-agent coordination.Proceedings of American Control Conference, 2005,3:1859-1864
[14]Xiao F,Wang L,Chen J,Gao Y P.Finite-time formation control for multi-agent systems.Automatica,2011,45(11):2605-2611
[15]Xia Y Q,Fu M Y.Compound Control Methodology for Flight Vehicles. Berlin,Heidelberg:Springer,2013.
[16]Olfati-Saber R,Fax J A,Murray R M.Consensus and cooperation in networked multi-agent systems.Proceedings of the IEEE,2007,95(1): 215-233
[17]Park D J,Lelima P D,Toussaint G J,York G.Cooperative control of UAVs for localization of intermittently emitting mobile targets.IEEE Transactions on Systems,Man and Cybernetics,Part B:Cybernetics, 2009,39(4):959-970
[18]Bradley J M,Atkins E M.Toward continuous state-space regulation of coupled cyber-physical systems.Proceedings of IEEE,2012,100(1): 60-74
[19]Joslyn C,Rocha L M.Towards semiotic agent-based models of sociotechnical organizations.In:Proceedings of AI,Simulation and Planning in High Autonomy Systems(AIS 2000)Conference.Tucson,Arizona, 2000.70-79
[20]Kwapien´ J,Droz˙dz˙ S.Physical approach to complex systems.Physics Report,2012,515(3-4):115-226
[21]Willems J C.In control,almost from the beginning until the day after tomorrow.European Journal of Control,2007,13(1):71-81
[22]Hill D J.Advances in stability theory for complex systems and networks. In:Proceedings of the 27th Chinese Control Conference.Kunming, China:IEEE,2008.13-17
[23]Desoer C A,Vidyasagar M.Feedback Systems:Input-output Properties. New York:Academic Press,1975.
[24]Wang X,Chen G.Synchronization in scale-free dynamical networks: robustness and fragility.IEEE Transactions on Circuits and Systems-I: Fundamental Theory and Applications,2002,49(1):54-62
[25]Wu C W.Synchronization in ComplexNetworksof Nonlinear Dynamical Systems.New Jersey:World Scienti fi c,2007.
[26]Xia Y Q.From networked control systems to cloud control systems.In: Proceedings of the 31st Chinese Control Conference.Kunming,China: IEEE,2012.5878-5883
[27]The economist,cloud computing:clash of the clouds[Online],available: http://www.economist.com/node/14637206,November 3,2009
[28]Says G.Cloud computing will be as in fl uential as e-business[Online],available:http://www.gartner.com/newsroom/id/707508,22 August,2010
[29]Galen G.What cloud computing really means[Online],available: http://www.infoworld.com/d/cloud-computing/what-cloud-computingreally-means-031,June 6,2009
[30]Cloud computing[Online],available:http://en.wikipedia.org/wiki/ Cloud_computing,November 27,2011
[31]Cloud computing[Online],available: http://www.cloudcomputingde fi ned.com/,July 17 2010
[32]Segaran T,Hammerbacher J.B′eautiful Data:The Stories Behind Elegant Data Solutions.Sebastopol:OReilly,2009.
[33]White T.Hadoop:The De fi nitive Guide(Second edition).Sebastopol: O’Reilly,2012.

Yuanqing Xia graduated from the Department of Mathematics,Chuzhou University,China in 1991. He received his M.S.degree in fundamental mathematics from Anhui University,China in 1998 and his Ph.D.degree in control theory and control engineering from Beijing University of Aeronautics and Astronautics,China,in 2001.From 1991 to 1995, he was with the Tongcheng Middle-School,China, where he worked as a teacher.During January 2002-November 2003,he was a postdoctoral research associate in the Institute of Systems Science,Academy of Mathematics and System Sciences,Chinese Academy of Sciences,China, where he worked on navigation,guidance and control.From November 2003 to February 2004,he was with the National University of Singapore as a Research Fellow,where he worked on variable structure control.From February 2004 to February 2006,he was with the University of Glamorgan, Pontypridd,U.K.,as a research fellow,where he worked on networked control systems.From February 2007 to June 2008,he was a guest professor with Innsbruck Medical University,Innsbruck,Austria,where he worked on biomedical signal processing.Since July 2004,he has been with the Department of Automatic Control,Beijing Institute of Technology,Beijing, fi rst as an associate professor,then,since 2008,as a professor.And in 2012, he was appointed as Xu Teli Distinguished Professor at the Beijing Institute of Technology and obtained the National Science Foundation for Distinguished Young Scholars of China.
His current research interests are in the fi elds of networked control systems, robust control and signal processing,active disturbance rejection control and fl ight control.He has published eight monographs in Springer and John Wiley, and more than 100 papers in journals.He is an editor in deputy of theJournal of the Beijing Institute of Technology,Associate editor ofActa Automatica Sinica,Control Theory and Applications,International Journal of Innovative Computing,Information and Control,International Journal of Automation and Computing.He obtained the Second Award of the Beijing Municipal Science and Technology(No.1)in 2010,the Second National Award for Science and Technology(No.2)in 2011,and the Second Natural Science Award of The Ministry of Education(No.1)in 2012.
t
May 18,2014;accepted September 12,2014.This work was supported by National Basic Research Program of China(973 Program)(2012CB720000),National Natural Science Foundation of China (61225015,61273128),Foundation for Innovative Research Groups of the National Natural Science Foundation of China(61321002),the Ph.D.Programs Foundation of Ministry of Education of China(20111101110012),and CAST Foundation(CAST201210).Recommended by Associate Editor Huijun Gao.
:Yuanqing Xia.Cloud control systems.IEEE/CAA Journal of Automatica Sinica,2015,2(2):134-142
Yuanqing Xia is with the School of Automation,Key Laboratory of Intelligent Control and Decision of Complex Systems,Beijing Institute of Technology,Beijing 100081,China(e-mail:@bit.edu.cn).
杂志排行

IEEE/CAA Journal of Automatica Sinica的其它文章
- Single Image Fog Removal Based on Local Extrema
- An Overview of Research in Distributed Attitude Coordination Control
- Operation Ef fi ciency Optimisation Modelling and Application of Model Predictive Control
- Stable Estimation of Horizontal Velocity for Planetary Lander with Motion Constraints
- Production Line Capacity Planning Concerning Uncertain Demands for a Class of Manufacturing Systems with Multiple Products
- Consensus Seeking for Discrete-time Multi-agent Systems with Communication Delay