An Overview of Research in Distributed Attitude Coordination Control
2015-08-09LongMaHaiboMinShichengWangYuanLiuandShouyiLiao
Long Ma,Haibo Min,Shicheng Wang,Yuan Liu,and Shouyi Liao
An Overview of Research in Distributed Attitude Coordination Control
Long Ma,Haibo Min,Shicheng Wang,Yuan Liu,and Shouyi Liao
—This paper provides an overview of attitude coordination problems of multi-rigid-body with the goal of promoting research in this area.Theoretical results regarding consensus seeking with different system models,different communication topologies,different control goals and different techniques are summarized.And applications of consensus protocols to multirigid-body coordination are investigated.Finally,some future research directions and open problems are also proposed.
Index Terms—Multi-rigid-body,attitude coordination,coordination control,consensus,synchronization.
I.INTRODUCTION
COORDINATION control problem of multi-agent systems has received more and more attention in recent years.By transferring and sharing information through communication networks,the agents of the system can be controlled accurately and the whole system will achieve the control goal.Compared with single-agent system,multi-agent systems have special advantages due to its cooperation,such as higher feasibility,higher accuracy,more robustness,easier expandability, lower cost,higher energy ef fi ciency,higher system fl exibility and higher probability of success.Currently,there are three kinds of controllers for coordination control problems,i.e., centralized controller,decentralized controller and distributed controller.Both of the fi rst two controllers need a principal controller for global control or local control.However,the distributed one does not need a principal controller,but only a local controller for each agent.Note that some literature have reviewed the coordination control problems.Reference [1]provides a survey of spacecraft formation fl ying control including fi ve parts,i.e.,multiple-input multiple-output, leader/follower,virtual structure,cyclic and behavioral.Some theoretical progress of consensus problems is reviewed in [2],such as convergence and equilibrium state analysis under time-invariant as well as dynamic topologies,information uncertainties,communication delays,consensus synthesis,etc. Reference[3]gives an overview of current applications of cooperative control,e.g.,military systems,mobile sensor networks,transportation systems,testbeds,etc,and some of thekey technical approaches are summarized,including formation control,cooperative tasking and spatio-temporal planning. Some special consensus problems are introduced in[4],whose underlying state-space is not a linear space,but instead a highly symmetric nonlinear space such as the circle and other relevant generalizations.In[5],some fundamental problems are discussed,such as consensus,rendezvous, fl ocking and formation,and based upon the characteristics of system dynamics and communication topology,the latest research achievements on coordination control of networked Euler-Lagrange systems are presented intensively.
On the other hand,spacecraft formation fl ying(SFF)becomes a new technology that plays an important role in the future space missions such as earth observing(EO)[6-7],orbit express(OE),terrestrial planet fi nder(TPF)[8],space telescope assembly(STA),stellar imager(SI),synthetic-aperture imaging(SAI)[9],etc.This interest is motivated by the advantages of replacing a traditional large and expensive spacecraft with a cluster of micro-spacecraft to accomplish a common task in a coordinated manner[1].
One of the most important control goal for SFF is attitude consensus or alignment,where every spacecraft updates its own orientation using the orientations of its local neighbors. As a result,the orientations of all spacecraft approach a common value.For example,in interferometry applications[10-11], it is often essential to control different spacecraft to maintain the same or relative attitudes during and after formation manoeuvres.This is a particularly challenging problem in dynamics since the angular velocity of the body cannot be integrated to obtain the attitude of the body[12],which is also the reason why there exist only few papers dealing with this problem in the available literature.
It is well known that the biggest difference between multiagent system and single-agent system lies in the communication network.Therefore,the characteristics of networks decide the performance of the whole system to a great extent,such as time delays,switching topologies and directed topology. However,the characteristics of the system model are also crucial,such as parametric uncertainties,external disturbances, etc.Furthermore,we also concern about the control goals and the techniques used in the literature.
The rest of the paper is organized as follows.In Section II, we provide basic background of spacecraft attitude dynamics and graph theory.The recent researches on some representative problems of attitude coordination control are reviewed in Section III.In Section IV,we conclude the whole paper and give some future research directions.
II.PRELIMINARIES
A.Graph Theory
Graphs can be conveniently used to represent the information fl ow between agents.LetG={V,E,A}be an undirected graph or directed graph,i.e.,digraph,of ordernwith the set of nodesV(G)={v1,v2,···,vn},the set of edgesE⊆V×V, and a weighted adjacency matrixA={aij}containing nonnegative adjacency elementsaij.The node indices belong to a fi nite index setl={1,2,···,n}.An edge ofGis denoted byeij=(vi,vj)and it is said to be incoming with respect tovjand outgoing with respect tovi.For an undirected graph,∀i,j∈l,if(vi,vj)∈E(G),then(vj,vi)∈E(G),but this does not hold for a digraph.A directed path from nodeito nodejis a sequence of edges in the form of(i1,i2),(i2,i3),···,in a directed graph.A directed tree is a directed graph,where every node has exactly one parent except for the root,which has directed paths to every other node.A directed spanning tree of a directed graph is a direct tree that contains all nodes of the directed graph.A directed graph has a spanning tree if there exists a directed spanning tree as a subgraph of the directed graph.The set of neighbors of nodeviis the set of all nodes which point(communicate)tovi,denoted byNi={vj∈V:(vi,vj)∈E(G)}.Graph adjacency matrixA=[aij]∈Rn×n,is such thataij>0 ifj∈Nioraij=0 otherwise.The in-degree of vertexviis denoted bydi=.Similarly,the out-degree ofviis denoted bydi=.If the in-degree equals to the out-degree for allvi∈V(G),then the graph is said to be balanced.D=diag[d1,···,dn]∈Rn×nis called the degree matrix ofG.The weighted Laplacian matrix ofGisL=D-A.
B.Representation of Attitude Dynamics
For a satellite,the attitude information can be measured by attitude determination system composed by gyros,GPS sensors,sun sensors and infrared horizon sensors.
In general,there exist several parameterizations to represent the orientation angles,i.e.,the three-parameter representations (e.g.,the Euler angles,Gibbs vector,Cayley-Rodrigues parameters,or modi fi ed Rodrigues parameters)and the four parameter representations(e.g.,unit quaternion).However,the three-parameter representations always exhibit singularity.For example,the Jacobian matrix in the spacecraft kinematics is singular for certain orientations,and it is well known that the four-parameter representations(e.g.,unit quaternion) are considered for global representation of orientation angles without singularities.
We only provide the most commonly used presentation of unit quaternion and modi fi ed rodrigues parameters(MRPs) here.For more information of the other representations,one can refer to[13].
1)Unit Quaternion:Consider a group ofnrigid spacecraft. The motion equations of thei-th rigid spacecraft are given by

C.Basic Problems in Attitude Cooperation Control
1)Leaderless Synchronization Problem:The leaderless feature of the algorithms makes them suitable for applications where the particular consensus equilibrium is not important, but rather that each system in the team converges to an identical state.While there are many applications where there exists a group reference trajectory,i.e.,leader-following case, there are also numerous applications where leaderless algorithms are important.Examples include rendezvous, fl ocking, and attitude synchronization.For example,the proposed algorithms have potential applications in automated rendezvous and docking[14].
When no desired attitude is assigned to the spacecraft,all spacecraft are required to synchronize their attitudes to the same attitude.The control goal can be formulated as

wheredenotes the norm of a vector.
2)Leader-follower Problem:A constant desired attitude, represented by the unit-quaternionqd,is available to a single spacecraft as a leader.All spacecraft are required to synchronize their attitudes to the desired attitude,which can be named as regulation case.The control goal can be formulated as

If given a dynamic desired attitude with the angular velocity denoted byωd,all spacecraft are required to synchronize not only their attitudes to the desired attitude but also their angular velocities to the desired angular velocity.This is called dynamic tracking case,which can be formulated as

3)Formation Problem:Formation is to realize a special geometric architecture by controlling every spacecraft,which can be described as

III.REPRESENTATIVEATTITUDECOORDINATION CONTROLPROBLEMS
A distributed controller for attitude synchronization is bene fi cial for practical uses such as satellite surveillance,pointing control,formation fl ying and space based interferometry.The advantages of using a distributed attitude controller are to avoid a complete redesign of the control system when new subsystems are added,and to guarantee the stability of the whole system[15-16].There are some conditions we should consider in dealing with attitude coordination control problems as follow.To describe the relative attitudes between different spacecraft,the linear expression is simple,while the nonlinear form has a clear physical meaning and can be easily transformed to other attitude representation schemes.With global inertial frame information,the controller design is convenient, while the condition with no global inertial frame information but only relative attitude information is more practical.State feedback or output state feedback in controller design should be choosen according to the practical scenario.Consensus tracking control for a group of spacecraft is more challenging if only a subset of group agents have access to the virtual leader[17].Furthermore,another challenge is the design of reliable systems that are able to provide good performance even in the presence of uncertainties and faults[18].Moreover, obtaining global asymptotic stability of rigid-body attitude is a fundamental and dif fi cult task.
In this section,we divide the attitude coordination control problems into fi ve sub-problems,such as system models, communication topologies,control goals,special strategies and others,and this section can be summarized as Table I.
A.System Models
1)Parametric Uncertainty and External Disturbance:Parametric uncertainty and external disturbance are common characteristics of multi-rigid-body systems.For example,due to the change in mass properties,there exists uncertainty in the inertia matrix,analogously,due to the manufacture technics,there exist external disturbances in the actuators or magnetorquers.To solve this problem,variable structure control,sliding mode control method andH∞control method are effective.
A simple distributed variable structure coordinated controller is proposed in[19]to solve the attitude coordination control problem,with the presence of model uncertainties, external disturbances and time varying communication delays. By constructing a sign function with an auxiliary vector and designing the control law without using the information of inertia matrix,the rejection of model uncertainties and external disturbances is realized.In particular,[20]presents a general framework for synchronized multiple spacecraft rotations via consensus-based virtual structure.In this framework,both parametric uncertainty and external disturbance are taken into consideration,and a time-varying sliding mode control (TVSMC)algorithm is designed to improve the robustnessof the actual attitude control system.As an alternative to the virtual structure approach,a class of distributed coordinated attitude control laws using behavior-based control approach are proposed in[21].In order to reject the model uncertainties and external disturbances,a term composed by a sliding vector is derived.By converting the attitude dynamics to Euler-Lagrange equations,[22]gives another auxiliary vector,based upon which a distributed discontinuous adaptive controller is designed to reject the effect of external disturbances.Different from the above literature,[23]develops two robust adaptive algorithms to handle the effects of unmodeled dynamics and unknown inertia matrices of agents.The fi rst one is based on modi fi cation method which traps the trajectories of the system into a small neighborhood around the origin.In the second algorithm,the effects of external disturbances are removed by using a discontinuous function.Moreover,[24]proposes a fi ltered robust adaptive attitude coordinated controller to overcome the case with input constraint,model uncertainties, and external disturbances.
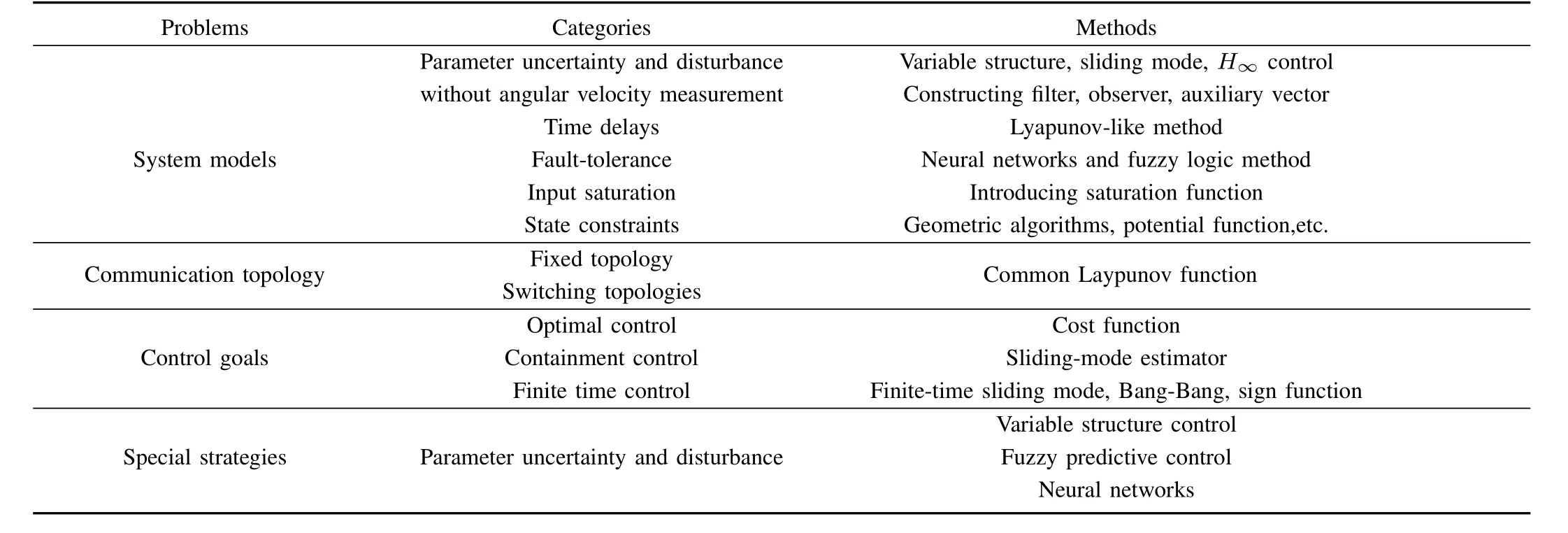
TABLE I REPRESENTATIVE ATTITUDE COORDINATION CONTROL PROBLEMS AND METHODS
On the other hand,[25]presents an adaptive fuzzy mixedH2/H∞attitude control method,and the effect of external disturbance and fuzzy approximation error on spacecraft attitude can be restrained and the tracking error as well as consumed energy of the controller is minimized.Based on linear timeperiodic models andH∞control theory,[26]proposes an approach guaranteeing robustness to parametric uncertainty and optimal performance in terms of disturbance attenuation.
Note that the parametric uncertainty problem can be solved in two ways.One is to design the control law without using the information of inertia matrixJi,in which the control law has the following form

whereandare both positive constants,qijis the attitude error between thei-th agent and thej-th agent,udiis the robust term.Another way is to linearly parameterize the unknown nonlinear part of the function,i.e.,

with

whereYi(ωi)is the polynomial ofωiand˙ωdi.
To solve the external disturbance problem,we can add a robust term in the control law,i.e.,udi=λisgn(ωi+qi)in (10),whereλiis the upper bound of the external disturbance.
2)Without Angular Velocity Measurement:In the application of spacecraft formation control,when the whole system is con fi gured without angular velocity sensor for low cost and small volume,or angular velocity sensor conks out,the control strategy should be designed without using the information of angular velocity.This problem can be solved by constructing a proper fi lter,a model-based observer or an auxiliary vector.
Regulation Case.In[27],to solve this problem for attitude control of a rigid body,the angular velocity feedback is replaced by a nonlinear fi lter of the quaternion,rather than a model-based observer reconstructing the velocity.Reference [28]further considers the problem in the presence of an unknown inertia matrix.Using a full-state feedback controller, not only parametric uncertainty is compensated,but also angular velocity measurements is eliminated.Thereafter,the work of[22]is extended to synchronized multiple spacecraft rotations control problem in[29]with a passivity-based damping method.Based on nonlinear observers and vectorial observer backstepping,[30]proposes a Leader/Follower output feedback synchronization scheme for control of the attitude of two satellites when angular velocity measurements are not available.As an extension,[30]presents a solution to the problem of tracking relative rotation in a leader-follower spacecraft formation using feedback from relative attitude only.The controller incorporates a linear approximation fi lter to achieve knowledge of angular velocity,and the controller structure renders the equilibrium points of the closed-loop system uniformly practically asymptotically stable(UPAS). However,[30-31]only consider a two-body problem,and the solutions cannot be used to multiple rigid-body problems.In [32],a distributed control algorithm for attitude coordination of spacecraft formation without angular velocity feedback is presented.The advantage of this algorithm is that it requires limited information exchange among the spacecraft in the formation(only attitude information exchange is necessary).In addition,[33]proposes a leader-follower-type control scheme for the attitude synchronization of a spacecraft formation to a desired constant attitude(available only to a single spacecraft,the leader),while maintaining the same attitude during formation maneuvers,and also proposes another scheme with no reference attitude,by constructing an auxiliary system for each spacecraft.Similarly,[34]also uses the auxiliary system to solve the distributed attitude alignment control of spacecraft within a formation without angular velocity measurement, however only the regulation case is considered.
Dynamic Tracking Case.References[35-36]extend the result of[34]to dynamic tracking case,where the desired angular velocity is not zero.Enlightened by the work of[27] and[34],[37]uses both a distributed sliding-mode estimator and a passivity approach to derive a control law without angular velocity measurements,with modi fi ed rodriguez parameters(MRPs)for attitude representation.To consider more complicated case,unknown mass moment of inertia matrix and external disturbances are added into the attitude dynamics. In a related work in[38],an adaptive neural controller is proposed via incorporating a fi ltering technique to generate a pseudo-velocity tracking error signal from attitude angle measurements into the exiting adaptive neural network control scheme using the Chebyshev neural network,and converting attitude dynamics to Euler-Lagrange dynamics.However,it is restricted to the condition that all the followers know the attitude state of the leader.Particularly,[39]derives a control law that guarantees a group of spacecraft to track a time-varying reference attitude without requiring velocity measurements even when the common reference attitude is only available to a subset of the group members.As an extension,[40]discusses attitude tracking and synchronization problem without angular velocity measurements as well as with input constraints,and gives a controller design for thisproblem.Using a low-pass linear fi lter state,which is derived without explicit differentiation of attitude to synthesize angular velocity-like signals,[41]proposes a controller for satellite formation fl ying without using explicit absolute angular velocity or relative angular velocity feedback,and with unknown communication non-uniform various time-delays.
3)Time Delays:In practical applications,time delays inevitably exist in the system and communication links,which may degrade the control performance of the formation and even destabilize the entire system.Lyapunov-like method is effective for time delay problems,i.e.,constructing Lyapunov-Krasovskii function,Lyapunov-Razumikhin function and Setvalued Lyapunov function.
Reference[18]proposes a simple distributed variable structure coordinated controller with Lyapunov′s directed method for multiple spacecraft attitude coordination control problem in the presence of model uncertainties,external disturbances and time-varying delays in the intercommunication.However, the restrictionTij=Tjidenoting the nonnegative constant communication time delay from thej-th spacecraft to thei-th spacecraft,is conservative.With constant time delays, [42]designs two control laws that can guarantee attitude synchronization with zero and non-zero fi nal angular velocities respectively.Using Euler parameters to represent the attitude deviation between spacecraft,[43]proposes a new PD-type attitude synchronization control algorithm,and a new tool called Tree Expanding approach is developed to show the convergence of the attitude synchronization errors,with which attitude synchronization is indeed achieved without requiring any assumption of the spacecraft orientations.In particular, [44]proposes a virtual systems-based approach that removes the requirement of the angular velocity measurements,based upon which the leaderless and leader-follower problems with time-varying communication delays and undirected communication topology,and the leaderless problem under directed topology and constant communication delays are all solved. Then,[45]extends this to solve the cooperative attitude tracking control problem.Alternatively,[46]deals with the problem of cooperative attitude tracking with time-varying communication delays as well as the delays between inter-synchronization control parts and self-tracking control parts in the spacecraft formation fl ying,and more speci fi cally,a class of linear fi lters are developed to derive an output feedback control law without having direct information of the angular velocity.Moreover, [47]develops an cooperative attitude control scheme with model uncertainties,external disturbances and variable time delays,and the novelty of this approach lies in the strategy to construct such a Lyapunov function scarifying theL2-gain dissipative inequation that ensures not only the stability of a cooperative attitude tracking formation system but also anL2-gain constraint on the tracking performance.Reference [48]addresses the robust adaptive coordinated attitude control problem(CACP)for formation spacecraft with model and disturbance uncertainties,and especially with unknown constant time delays.Unlike existing designs,where constant delays must be explicit and bounded,the proposed novel laws solve the CACP with disturbances and unknown/large constant communication delays by injecting a nonlinear term.Different from the existing literature which describe the delayed relative attitude via linear algorithm,[49]develops a new control law with the nonlinear nature of the employed quaternion based attitude coupling.As an alternative,[50]treats the attitude error and the local relative attitude on the nonlinear manifold-Lie group,and attempts to obtain coupling attitude information by the natural quaternion multiplication.However,most of the literature only consider the problem with undirected topology.
4)Fault-tolerance:Another challenge is the design of reliable controllers that are able to provide good performance even in presence of faults.Most traditional attitude fault-tolerant control recon fi guration techniques rely on failure detection and isolation.However,neural networks and fuzzy logic systems can be used to the design of nonlinear fault tolerant controllers.
Reference[51]presents a distributed adaptive fuzzy approximation design to achieve attitude tracking control for formation fl ying in the presence of external disturbances and actuator faults.A nonsingular fast terminal sliding mode controller based on consensus theory is designed for distributed cooperative attitude synchronization,and a fuzzy logic system(FLS)is introduced to approximate unknown individual satellite attitude dynamics due to actuator faults.In[52],a class of distributed adaptive fault-tolerant attitude coordination control laws are proposed to achieve high-attitude tracking and synchronization performance,even in the presence of an unknown mass moment of inertia matrix,bounded external disturbances,actuator failures,and control saturation limits.
5)Input Saturation:Control input saturation due to the limited capacity of actuators is a major problem in attitude control laws design.When control input saturation occurs, the dynamic performance of attitude control system goes bad, and even worse,the whole closed-loop system will become unstable,which is very harmful.In order to solve input saturation problems,either introducing a saturation function or properly choosing the control parameters is effective.
Reference[53]presents a continuous globally stable tracking control algorithm for spacecraft attitude control problem in the presence of control input saturation,parametric uncertainty,and external disturbances.Applying anti-windup control and intelligent integrator to minimize reaction wheel type actuator saturation,[54]presents a spacecraft large angle attitude control strategy with actuator saturation limit.By choosing the control parameters properly,[55]presents a nonlinear control scheme to deal with input saturation.In particular,[56]addresses a quaternion-based attitude regulation control for rigid spacecraft subject to input constraints. By introducing hyperbolic tangent saturation function into the control scheme,input saturation problem can be restrained effectively.However,only a single spacecraft attitude control problem is considered in the above references.Based upon the results in[56],[57]studies the coordinated attitude control problem of satellite formation consisted of two satellites, which is further extended in[58]to fi nite-time case.In another related work[59],a solution to the problem of formation recon fi guration and maintenance for fl eets of micro-satellites in the presence of persistent disturbances and under inputsaturation and formation accuracy constraints is proposed.The proposed control scheme is based on a bank of controllerscomposed by primalLQcontrol laws,which compensate the system without taking into account the presence of constraints, and nonlinear CG units,which are used to generate a suitably modi fi ed version of the reference signal,capable of producing evolutions that ful fi l the constraints at each time instant. Extending the results in[31],[60]considers quaternion-based attitude synchronization and tracking problem for spacecraft formation with actuator constraints as well as without measurement and exchange of angular velocities among spacecraft in the formation.Reference[61]deals with the input saturation problem by incorporating a low-pass command fi lter such that the generated control law could be implementable even under physical or operating constraints on the control input. In particular,[62]introduces a new continuously differentiable nonlinear saturation function vector in order to guarantee the boundedness of control input.Furthermore,[63]considers a more complicated case that only a subset of the group members has access to the common reference attitude,and a quaternion-based distributed attitude coordination control scheme is proposed for attitude coordination control problem with consideration of the input saturation and with the aid of the sliding-mode observer,separation principle theorem, Chebyshev neural networks,smooth projection algorithm,and robust control technique.
6)State Constraints:For formation fl ying of multiple spacecraft missions with sensitive pay loads,such as cryogenically cooled infrared telescopes,the slew maneuver must be achieved without directing the payload along the sun vector or at other infrared bright regions of the sky[64].Therefore, studying attitude coordination control problem with attitude constraints is very meaningful.In general,there exist some methods to solve this problem,e.g.,geometric algorithms, potential function-based algorithms,constraint monitor algorithms,randomized algorithms,semide fi nite programmingbased algorithms,etc[65].
In[66],Yoonsoo Kim′s team considers the attitude control problem augmented with an arbitrary number of non-convex quadratic constraints.By utilizing the implicit magnitude constraint of the state vector(i.e.,quaternion),they reduce this problem to a convex quadratically constrained quadratic program or a semide fi nite program,which leads to an ef fi cient solution strategy for general quadratically constrained attitude control problems.It is worth noting that,this is about a single spacecraft attitude re-orientation with the sun avoidance (i.e.,avoiding a single static exclusion zone).This work is extended in[67]to two spacecraft with multiple exclusion zones.However,the approach in[67]seems not to be a viable solution to the problem involving more than two spacecraft, as its computational cost shall increase undesirably fast as the number of spacecraft involved increases.Based upon [66]and[67],[68]considers a team of spacecraft which require changing their orientation to a common attitude using a distributed control scheme under a connected communication topology,while satisfying cone avoidance constraints due to blind celestial objects,plume impingement and so on.However,this kind of choice and decision scheme needs abundant calculation.
It is worth mentioning that,[69]derives a kind of navigation function,which is very useful when obstacles avoidance is involved.Reference[70]designs a navigation function based upon the results in[69],and proposes an algorithm based on the navigation function and backstepping method for the attitude maneuver of spacecraft under pointing constraints. Thereafter,[71]develops a method for controlling spacecraft large slew maneuvers with sun vector avoidance,while[72] considers the trajectory optimization for satellite recon fi guration maneuvers with attitude constraints.In[73],a predictive control algorithm based upon the construction of positive de fi nite Hessian matrix is presented for spacecraft attitude maneuver with non-convex geometric constraint together with bounded inputs.Another algorithm based on the navigation function of line-of-sight and back-stepping method is presented in[74].Considering the attitude constraint problem during spacecraft attitude tracking in[75],quaternions are used to describe the region of forbidden attitude,and a new Gauss avoidant potential function is proposed using the minimum angle allowed by the forbidden attitude,by which a safe attitude maneuver controller is obtained.However,all the aforementioned papers rely on the case of a rigid body.
We can see that there are few literature concerning about the attitude coordination control with obstacles avoidance,and this will be an interesting research topic.
B.Communication Topologies
1)Fixed Topology:The communication topology is static.
Fixed and undirected topology.Reference[44]solves the leaderless and leader-follower problems under fi xed and undirected communication topology.We see that undirected graph gives a symmetric Laplacian matrix,which makes it convenient to design the control law,while directed graph does not.
Fixed and directed topology.In[76],a cooperative attitude tracking problem is addressed under directed information exchange,where a group reference attitude is available to only a subset of the group members.However,the analysis for attitude tracking in[76]is restricted to the case where the directed graph can be simpli fi ed to a graph with only one node.It is not clear whether the conclusion still applies to a general directed graph.Then,[77]considers distributed attitude synchronization for multiple rigid bodies with Euler-Lagrange equations of motion.Reference[78]extends this work to incorporating a time-varying reference attitude,where the reference attitude is allowed to be available to only a subset of the group members under general directed information exchange.Particularly,[79]designs a distributed coordinated tracking algorithm which guarantees all followers to track the leader and extends the distributed control algorithm to guarantee that the spacecraft maintain constant relative orientations with their neighbors.In[80],a distributed adaptive slidingmode control law is designed by introducing appropriate multi-spacecraft sliding-mode vector,which includes attitude error and angular velocity error of individual spacecraft,as well as relative attitude errors and relative angular velocity errors between spacecraft.As an alternative,[81]addresses the distributed attitude synchronization problem of multiplespacecraft with unknown inertia matrices,and two distributed adaptive controllers are proposed for the cases with and without a virtual leader.However,the attitude dynamics is converted to Euler-Lagrange form.Moreover,[82]provides distributed linear kinematic control laws for the problems that the agents measure their own orientations in a global reference frame and the agents only measure the relative orientations to their neighbors respectively.
2)Switching Topologies:Communication outage,new member′s joining or quitting,radio silence or recovery will cause the change of the communication topology,named switching topologies,which makes it more dif fi cult to design the control laws.
Switching and undirected topologies.Based on relative attitude information and Modi fi ed Roodriguez Parameters, [36]considers cooperative attitude tracking problem and gives a control law in the presence of a dynamic communication topology.Reference[83]extends this to the condition that there exist both multiple time-varying communication delays and dynamically changing topologies,and the result of uniformly ultimate boundedness of the closed-loop system is obtained.Considering more complicating elements,[84]presents controllers that can render a spacecraft formation consistent to a given trajectory globally with dynamic information exchange graph and non-uniform time-varying delays while coping with the parameter uncertainties and unexpected disturbances.In [85],a 6-DOF dynamics model of the spacecraft formation fl ying is established in Euler-Lagrange form,and a control algorithm based on consensus theory is proposed in the presence of dynamic communication topology.Furthermore,almostglobal attitude synchronization is achieved in[86]based on switching joint connection,however auxiliary variables are introduced which make the controllers complicated.In[87], by utilizing Lyapunov direct method and choosing a common Lyapunov function properly,the robustness of the designed position and attitude coordinated controllers to communication delays,switching topologies,parameter uncertainties and external disturbances is guaranteed.
Switching and directed topologies.It is worth mentioning that,[88]addresses the attitude synchronization problem of multiple rigid body agents in SO(3)with directed and switching interconnection topologies.Using the axis-angle representation of the orientation,a distributed controller is proposed based on relative orientations between the agents without a global reference coordinate frame.In the case that each agent can only measure the attitudes of its neighbors from the body- fi xed frame of the agent,a distributed protocol is proposed in[89]provided that the inter-agent topology graph is jointly connected and each relative attitude between agents initially is contained within a geodesic ball of radius less than 2π/3 centered at its desired relative attitude.From the viewpoint of interior metrics,[90]provides a consensus protocol for strongly convex geodesic balls and applies it to the consensus problem of rotation attitudes under switching and directed communication topologies.
We see that,to solve the switching topologies problem,we usually choose a common Lyapunov function to guarantee the robustness of the whole system.Moreover,the parameterdependent Lyapunov function may be useful for the distributed control design,which can reduce the conservation of using a common Lyapunov function.
C.Control Goals
1)Optimal Control:With the development of aerospace mission,it is badly in need of control strategy for spacecraft with less power and faster speed,which makes the spacecraft attitude maneuver optimal control problem a serious one.
There are some literature studying attitude optimal stabilization of a rigid body,e.g.,[90-96]control the satellite to a particular attitude with a minimum amount of fuel,while[97] and[98]investigate attitude maneuver with a minimum time, to name just a few.
However,there are few researches about multi-rigid-body attitude coordinated control with less fuel or less time.This will be a very interesting research direction.
2)Containment Control:Distributed attitude control problem becomes more challenging when it involves multiple leaders(which can be called as attitude containment control), however it is very useful in practice,e.g.,earth monitoring, astro observation,coordinated target attack with multiple warheads[99],etc.Under these circumstances,some spacecraft (i.e.,leaders)are set to form an objective area,and the other spacecraft(i.e.,followers)are rendered within this area to enlarge the monitoring fi eld,observation scope or killing radius.
Reference[100]studies the containment control problem in mobile networks.Reference[99]extends the results in [100]to the case of rigid body attitude containment control, but only discusses the case of multiple stationary leaders with asymptotic rather than fi nite-time convergence.When there exist multiple dynamic leaders,a distributed slidingmode estimator and a non-singular sliding surface are given to guarantee that the attitudes and angular velocities of the followers converge,respectively to the dynamic convex hull formed by those of the leaders in fi nite time in[101].However, the attitude dynamics is converted to Euler-Lagrange form, which is not straightforward enough to attitude control.In [102],for the case of undirected angular information topology and directed angular velocity information topology,a containment control algorithm based on relative angular and relative angular velocity is proposed,and the constrained conditions for the angular velocity information topology to ensure containment objective are obtained by using algebraic graph theory.However,only the regulation case is addressed.
Note that there are only few researches considering the attitude containment control problem with dynamic leaders, time delays,switching topologies,parametric uncertainties, and directed topology.This will be another future research direction.
3)Finite Time Control:Compared with asymptotic convergence, fi nite-time convergence is more useful in practical application.Sliding mode control(SMC)algorithm can be used to achieve this objective.
[103-104]give a few forms of terminal sliding modes and terminal sliding mode estimators respectively,bothof which are very useful for designing fi nite-time control laws. With terminal sliding mode,[105]proposes two control laws to drive a rigid spacecraft to reach a given desired attitude in fi nite time in the presence of model uncertainties and external disturbances.Using terminal sliding mode and Chebyshev neural network,a fi nite-time tracking control scheme is proposed for attitude tracking control of one spacecraft in[106]. It is worth to mention that,there are some errors in[106], which are corrected by[107].Based on the attitude dynamics representation of Modi fi ed Rodriguez Parameters,a distributed fi nite-time attitude control law is proposed for a group of spacecraft with a leader-follower architecture in[108].In [109],a novel fast terminal sliding manifold is presented,and a robust control term based on the hyperbolic tangent function is applied to suppress bounded external disturbances under fi xed topology.It is worth mentioning that,[110]develops a class of continuous sliding mode control schemes with fi nite-time convergent property under arbitrary communication topologies.Based on the behavior approach,an improved version of terminal sliding mode is applied in both the reaching phase and the sliding phase of the control system.In the presence of external disturbances,the proposed control strategies are able to overcome the unexpected phenomenon,and can steer the spacecraft formation to a dynamic reference attitude state coordinately.As an extension,[111]investigates the robust distributed attitude control problem for spacecraft formations with model uncertainties and external disturbances under uncertain communication topologies,and based on modi fi ed Rodrigues parameters representation and a Lagrange-like model,a class of distributed attitude control schemes designed by the use of sliding mode control approach are proposed to steer the attitude of the spacecraft formation to a time-varying reference states.In addition,[112]considers multi-spacecraft fi nite time attitude regulation control problem with a directed communication graph,while[113]considers this problem with input constraints.Combining the strategies of fi nite-time control,fast terminal sliding mode(FTSM)control and adaptive control, a novel distributed fi nite-time control law is proposed in the presence of inertia uncertainties and environmental disturbances under the general directed communication topology in [114],which ensures that each spacecraft can attain the desired time-varying attitude and angular velocity in fi nite-time while maintaining attitude synchronization with other spacecraft in the formation.Furthermore,in[90],a consensus protocol for strongly convex geodesic balls is proposed to solve the consensus problem of rotation attitudes with switching and directed communication topology.
Besides of SMC method,Bang-Bang control method and scaled sign function method[115-117]are both appropriate for distributed fi nite-time consensus problems.
D.Special Strategies
1)Variable Structure Control:Variable structure systems have been a major control design methodology for many decades.The term variable structure systems was introduced in the late 1950′s,and the fundamental concepts were developed for its main branch sliding mode control by Russian researchers Emelyanov and Utkin[118].When parameter uncertainties and external disturbances exist,sliding mode control method is very helpful.To some extent,sliding mode control is equal to variable structure control.
In[119],a kind of adaptive sliding mode contro1 algorithm is proposed in presence of severe nonlinearity,inertia matrix uncertainty and external disturbances during the large attitude angle maneuver of a spacecraft.With sliding mode control algorithm,[120]and[121]introduce controllers to achieve high performance on the attitude tracking under the actuator saturation.The second and third order quasi-continuous sliding control are applied to quaternion-based spacecraft attitude tracking maneuvers in[122],however can only realize fi rst-order sliding-mode dynamics because of the improperly chosen sliding vectors.Then,some alternative measures to realize second-order and third-order sliding-mode dynamics are suggested in[123].All the above literature are about attitude control of a single rigid spacecraft,but sliding mode control is also applicable for distributed attitude synchronization problem.Under the assumption that the relative position and attitude are known,a fully distributed variable structurebased relative attitude-coordinated control law is proposed in[124],which can ef fi ciently minimize the relative attitude error in the presence of model uncertainties and environmental disturbance torques,and achieve the attitude coordination among the multiple satellites fl ying in formation.In[125], a multi-spacecraft sliding manifold is derived,on which each spacecraft approaches the desired time-varying attitude and angular velocity while maintaining attitude synchronization with the other spacecraft in the formation.Translating attitude dynamics into Euler-Lagrange form,[126]designs a distributed robust controller with sliding mode to guarantee that the attitude errors between the followers and the leader converge to zero for any communication graph containing a directed spanning tree with the leader being the root.
2)Fuzzy Predictive Control:Another ef fi cient method for compensating model uncertainty and external disturbances is adaptive fuzzy predictive control algorithm.Formulating the attitude dynamics with quaternion,an adaptive fuzzy logic systems is constructed,based upon which,a direct adaptive fuzzy predictive control method is presented for attitude tracking of satellites with model uncertainty and external disturbances in [127].In[128],the direct adaptive fuzzy robust control is applied to the attitude stabilization control of the satellite,and the parameters of fuzzy rules in FLS can be adjusted so that the proposed method has on-line adaptive ability.
3)Neural Networks:Reference[129]introduces back propagation learning algorithm with feed forward neural networks, and[130]uses this method for function approximation.We know that neural networks have emerged as a powerful learning technique to perform complex tasks in highly nonlinear dynamic environments.Recently,some literature have investigated the problem of output feedback attitude control of a single spacecraft and multiple spacecraft formation based upon neural networks(NN)[131-132]and Chebyshev neural networks (CNN)[38-39,63,106,133-135],which have much signi fi cance for edi fi cation.
E.Others
Screws theory[136]combines translation and rotation simultaneously.Dual quaternion is the most succinct and effective way to represent screws dynamics[137],which has been used in both the dynamics and kinematics analysis of many research areas,such as spatial mechanisms[138],robots[139],rigid bodies[140],to name just a few.
Reference[141]deals with simultaneous position and attitude robust maneuver problem of a rigid spacecraft,and proposes a control strategy using backstepping technique that enables the spacecraft to track reference position and rotation motions in a fi nite time.Reference[142]addresses the synchronized control problem of relative position and attitude for spacecraft,and a new adaptive sliding mode control scheme is proposed to guarantee the globally asymptotic convergence of relative motion despite the presence of control input constraint, parametric uncertainties and external disturbances.In[143],a speci fi ed rooted-tree structure together with a dual quaternion solution to attitude and position control for multiple rigid body coordination problem are proposed.We can see that,there are few literature about multi-rigid-body systems coordinated control based on dual quaternion.This may be another research hotspot in future.
In[9],a class of nonlinearH∞attitude controllers are proposed to stabilize a satellite at a desired attitude or angular velocity,which is useful in practical application.Reference [144]considers the problem of autonomous synchronization of attitudes in a swarm of spacecraft,and removes the singularity and confusion by modeling the spacecraft as articles on SO(3) and driving these particles to a common point in SO(3).Reference[145]addresses passivity-based motion coordination of rigid bodies in the special Euclidean group SE(3)rather than special orthogonal group SO(3),under the assumption that the agents exchange information over strongly connected graphs.To handle the non-linearity of the dynamic system, the problems of absolute and relative attitude dynamics are formulated as the state-dependent Riccati equation(SDRE)in [146-147],based upon which,distributed coordinated attitude control algorithms are developed.Reference[148]investigates cooperative control strategies for spacecraft formations,also in case that platforms are not homogeneous but differ in attitude control actuators,such as thrusters,momentum exchange devices(momentum wheels,reaction wheels,etc.),and magnetic actuators.Converting the attitude dynamics to Euler-Lagrange form,[149]studies adaptive attitude synchronization of spacecraft formation with possible time delay,parameter uncertainties and unknown external disturbances.In[150], a hybrid feedback scheme is proposed relying on the communication of a binary logic variable between each pair of neighboring rigid bodies that determines the orientation of a torque component actuated to reduce their relative error. Through a hysteretic switch of this logic variable,the hybrid feedback achieves global synchronization under the assumption that the network is connected and acyclic.Reference[151] develops a gradient coupling law for attitude synchronization with partial state coupling on the Lie group SO(n),while[152] proposes a hybrid-dynamic algorithm for smoothly lifting an attitude path to the unit-quaternion space,which removes the limitation of unit quaternion and guarantees global asymptotical stabilization of the attitude of a rigid body.Different from the other literature,by extending the case of fi xed-gains in the synchronization signal,[153]considers two cases in which the local weights of the synchronization signal can differ for each spacecraft(node-dependent gains)and differ for each spacecraft and for each of its communication neighbors (edge-dependent gains).Moreover,[154]proposes a control scheme,which is directly developed on special orthogonal group(SO(3))to avoid ambiguities and singularities associated with the attitude representation of Rodrigues parameters or unit quaternion.
IV.CONCLUSIONS ANDFUTUREDIRECTIONS
We have reviewed distributed attitude coordination control problems for multi-rigid-body systems in the current literature. As a new research area,the study of attitude coordination control is still incomplete,and there remain some problems to be solved.
The fi rst problem is complex network.In current literature, most research assumes that there exists only communication delays.The case with both communication delays and self delays is a key branch of research in the future.The second is attitude coordination problem with state constraints,e.g.,with the sun vector as one static constraint,with multiple static or dynamic constraints,and it is also interesting and challenging. Furthermore,the control with less fuel consumption or less time is also of importance,however,there are few literature concerning these issues,which will be another research direction.
Obviously,rigid-body attitude dynamics is not like the single or double integrator dynamics,but all of them belong to the same kind of problem.The research hotspot of the single and double integrator systems will be the one of the rigid-body systems.Several interesting problems to be addressed are as follows.
1)Should we choose constant edge-dependent synchronization gains or use adaptive edge-dependent synchronization gains?How to optimize the synchronization gains?
2)In many practical multi-agent systems,consensus regulation performances and control energy consumptions should be considered simultaneously.How to get the guaranteed-cost consensus?
3)Except for system disturbances,there are some other kinds of uncertainties in multi-agent networks,which have signi fi cant in fl uence on the success of coordination algorithms and performances of the whole network.For discrete-time models,the distributed stochastic approximation method is introduced in[155-157]to attenuate the impact of communication/measurement noises and conditions are given to ensure mean square and almost sure consensus.For continuous-time models,[158]gives a necessary and suf fi cient condition on the control gain to ensure mean square consensus.Reference[159] deals with mean square consensus problems for linear multiagent systems communication noises.Reference[160]makes a systematic study of unstable network dynamic behaviors withwhite Gaussian input noises,channel fading and time-delay. Furthermore,computational expressions for checking mean square stability under circulant graphs are developed in[161]. References[162-163]study the distributed consensus with additive random noises for discrete-time and continuous-time models,respectively.Most of the above literature focus on the fi rst or second order linear systems.In rigid-body systems, how to solve the problem that the distributed consensus corrupted by communication noises?
According to the research goal,attitude coordination method is to provide a guidance to the practical application.The work on how to use these theoretical results to solve the real-life problems,deserves our effort.Currently,this research is mainly taken as a theoretical rather than an engineering problem.Another key problem is how to model the research objects more precisely.Considering different communication topologies,together with different control goals,and making the scenario more close to the real world condition,is also a meaningful direction.
REFERENCES
[1]Scharf D P,Hadaegh F Y,Ploen S R.A survey of spacecraft formation fl ying guidance and control.Part II:Control.In:Proceedings of the 2004 American Control Conference.Boston,Massachusetts:IEEE,2004. 2976-2985
[2]Ren W,Beard R W,Atkins E M.A survey of consensus problems in multi-agent coordination.In:Proceedings of the 2005 American Control Conference.Portland,OR,USA:IEEE,2005.1895-1864
[3]Murray R M.Recent research in cooperative control of multivehicle systems.Journal of Dynamic Systems,Measurement,and Control,2007, 129(5):571-583
[4]Sepulchre R.Consensus on nonlinear spaces.AnnualReviewsinControl, 2011,35(1):56-64
[5]Min Hai-Bo,Liu Yuan,Wang Shi-Cheng,Sun Fu-Chun.An overview on coordination control problem of multi-agent system.ActaAutomatica Sinica,2012,38(10):1557-1570(in Chinese)′
[6]Folta D,Bristow J,Hawkins A,Dell G.NASAs autonomous formation fl ying technology demonstration,earthobserving-1(EO-1).In:Proceedings of the 1st International Symposi′um on Formation Flying Missions and Technologies.Centre National dEtudes Spatiales,2002.71-76
[7]Neeck S P,Magner T J,Paules G E.nasa′s small satellite missions for earth observation.Acta Astronautica,2005,56(1-2):187-192
[8]Lawson P R.The terrestrial planet fi nder.In:Proceedings of the 2001 IEEE Aerospace Conference.Big Sky,Montana,USA:IEEE,2001. 4/2005-4/2011
[9]Kang W,Yeh H H.Co-ordinated attitude control of multi-satellite systems.International Journal of Robust and Nonlinear Control,2002, 12(2-3):185-205
[10]Chakravorty S.Design and Optimal Control of Multi-Spacecraft Interferometric Imaging Systems[Ph.D.dissertation],University of Michigan, Ann Arbor,MI,2004
[11]Hussein I I.Motion Planning for Multi-Spacecraft Interferometric Imaging Systems.[Ph.D.dissertation],University of Michigan,Ann Arbor, MI,2005
[12]Joshi S M,Kelkar A G,Wen J T-Y.Robust attitude stabilization of spacecraft using nonlinear quaternion feedback.IEEE Transactions on Automatic Control,1995,40(10):1800-1803
[13]Shuster M D.A survey of attitude representations.Journal of the Astronautical Sciences,1993,41(4):439-517
[14]Ren W.Distributed leaderless consensus algorithms for networked Euler-Lagrange systems.International Journal of Control,2009,82(11): 2137-2149
[15]Bakule L.Decentralized control:an overview.Annual Reviews in Control,2008,32(1):87-98
[16]Das A,Lewis F L.Distributed adaptive control for synchronization of unknown nonlinear networked systems.Automatica,2010,46(12): 2014-2021
[17]Cai H,Huang J.The leader-following attitude control of multiple rigid spacecraft systems.Automatica,2014,50(4):1109-1115
[18]Panagi P,Polycarpou M M.Decentralized fault tolerant control of a class of interconnected nonlinear systems.IEEE Transactions on Automatic Control,2011,56(1):178-184
[19]Jin E D,Jiang X L,Sun Z W.Robust decentralized attitude coordination control of spacecraft formation.Systems and Control Letters,2008, 57(7):567-577
[20]Cong B L,Liu X D,Chen Z.Distributed attitude synchronization of formation fl ying via consensus-based virtual structure.Acta Astronautica, 2011,68(11-12):1973-1986
[21]Liang H Z,Wang J Y,Sun Z W.Robust decentralized coordinated attitude control of spacecraft formation.Acta Astronautica,2011,69(5-6): 280-288
[22]Yang D P,Liu X D,Gan C,Guo Y H.Distributed adaptive attitude synchronization of multiple spacecraft with external disturbances.In: Proceedings of the 25th Chinese Control and Decision Conference. Guiyang,China:IEEE,2013.692-697
[23]Fadakar I,Fidan B,Huissoon J.Robust adaptive attitude synchronization of rigid body networks with unknown inertias.In:Proceedings of the 9th Asian Control Conference.Istanbul,Turkey:IEEE,2013.1-6
[24]Zheng Z,Song S M.Autonomous attitude coordinated control for spacecraft formation with input constraint,model uncertainties,and external disturbances.Chinese Journal of Aeronautics,2014,27(3): 602-612
[25]Chen B S,Wu C S,Jan Y W.Adaptive fuzzy mixedH2/H∞attitude control of spacecraft.IEEE Transactions on Aerospace and Electronic Systems,2000,36(4):1343-1359
[26]Zanchettin A M,Calloni A,Lovera M.Robust magnetic attitude control of satellites.IEEE/ASME Transactions on Mechatronics,2013,18(4): 1259-1268
[27]Lizarralde F,Wen J T.Attitude control without angular velocity measurement:a passivity approach.IEEE Transactions on Automatic Control, 1996,41(3):468-472
[28]Costic B T,Dawson D M,de Queiroz M S,Kapila V.A quaternion-based adaptive attitude tracking controller without velocity measurements.In: Proceedings of the 39th IEEE Conference on Decision and Control. Sydney,Australia:IEEE,2000.2424-2429
[29]Lawton J R,Beard R W.Synchronized multiple spacecraft rotations.Automatica,2002,38(8):1359-1364
[30]Bondhus A K,Pettersen K Y,Gravdahl J T.Leader/Follower synchronization of satellite attitude without angular velocity measurements.In: Proceedings of the 44th IEEE Conference on Decision and Control,2005 and 2005 European Control Conference.Seville,Spain:IEEE,2005. 7270-7277
[31]Kristiansen R,Lor´ıa A,Chaillet A,Nicklasson P J.Spacecraft relative rotation tracking without angular velocity measurements.Automatica, 2009,45(3):750-756
[32]Mehrabian A R,Tafazoli S,Khorasani K.Coordinated attitude control of spacecraft formation without angular velocity feedback:a decentralized approach.In:Proceedings of the 2009 AIAA Guidance,Navigation,and Control Conference.Chicago,Illinois:AIAA,2009.1-15
[33]Abdessameud A,Tayebi A.Attitude synchronization of a spacecraft formation without velocity measurement.In:Proceedings of the 47th IEEE Conference on Decision and Control.Cancun,Mexico:IEEE, 2008.3719-3724
[34]Abdessameud A,Tayebi A.Decentralized attitude alignment control of spacecraft within a formation without angular velocity measurements.In: Proceedings of the 17th World Congress the International Federation of Automatic Control.Seoul,Korea:IFAC,2008.1766-1771
[35]Abdessameud A,Tayebi A.On the coordinated attitude alignment of a group of spacecraft without velocity measurements.In:Proceedings of the 48th IEEE Joint Conference on Decision and Control and 28th Chinese Control Conference.Shanghai,China:IEEE,2009.1476-1481
[36]Abdessameud A,Tayebi A.Attitude synchronization of a group of spacecraft without velocity measurements.IEEE Transactions on Automatic Control,2009,54(11):2642-2648
[37]Meng Z Y,Ren W,You Z.Decentralised cooperative attitude tracking using modi fi ed Rodriguez parameters based on relative attitude information.International Journal of Control,2010,83(12):2427-2439
[38]Zou A M,Kumar K D.Adaptive attitude control of spacecraft without velocity measurements using Chebyshev neural network.Acta Astronautica,2010,66(5-6):769-779
[39]Zou A M,Kumar K D,Hou Z G.Attitude coordination control for a group of spacecraft without velocity measurements.IEEE Transactions on Control Systems Technology,2012,20(5):1160-1174
[40]Gao D,Lv J T,Wang B L.Distributed coordinated attitude control for multiple rigid bodies.Procedia Engineering,2012,29:2532-2538
[41]Hu Qing-Lei,Zhou Jia-Kang,Ma Guang-Fu.Angle velocity free attitude synchronization adaptive tracking control for satellite formation fl ying with time-varying delays.Acta Automatica Sinica,2012,38(3): 462-468(in Chinese)
[42]Lv J T,Gao D,Meng S M.Attitude synchronization for multiple rigid bodies with time delays.Procedia Engineering,2012,29:2539-2544
[43]Wang H L,Xie Y C.A new analysis tool for attitude synchronization of multiple spacecraft with communication delays.In:Proceedings of the 30th Chinese Control Conference.Yantai,China:IEEE,2011. 4576-4581
[44]Abdessameud A,Tayebi A,Polushin I G.Rigid body attitude synchronization with communication delays.In:Proceedings of the 2012 American Control Conference.Montreal,QC:IEEE,2012.3736-3741
[45]Abdessameud A,Tayebi A,Polushin I G.Attitude synchronization of multiple rigid bodies with communication delays.IEEE Transactions on Automatic Control,2012,57(9):2405-2411
[46]Zhou J K,Ma G F,Hu Q L.Delay depending decentralized adaptive attitude synchronization tracking control of spacecraft formation.Chinese Journal of Aeronautics,2012,25(3):406-415
[47]Zhou Jia-Kang,Hu Qing-Lei,Ma Guang-Fu,L¨u Yue-Yong.AdaptiveL2-gain cooperative attitude control of satellite formation fl ying with time-varying delay.Acta Aeronautica et Astronautica Sinica,2011, 32(2):321-329(in Chinese)
[48]Li G M,Liu L D.Robust adaptive coordinated attitude control problem with unknown communication delays and uncertainties.Procedia Engineering,2012,29:1447-1455
[49]Li G M,Liu L D.Coordinated multiple spacecraft attitude control with communication time delays and uncertainties.Chinese Journal of Aeronautics,2012,25(5):698-708
[50]Wang H L,Tan S P.Globally convergent attitude controlled synchronization of networked spacecraft on strongly connected graphs.In: Proceedings of the 31st Chinese Control Conference.Hefei,China: IEEE,2012.5780-5785
[51]Li J Q,Kumar K D.Decentralized fault-tolerant control for satellite attitude synchronization.IEEE Transactions on Fuzzy Systems,2012, 20(3):572-586
[52]Zou A M,Kumar K D.Robust attitude coordination control for spacecraft formation fl ying under actuator failures.Journal of Guidance, Control,and Dynamics,2012,35(4):1247-1255
[53]Boˇskovi´c J D,Li S M,Mehra R K.Robust tracking control design for spacecraft under control input saturation.Journal of Guidance,Control, and Dynamics,2004,27(4):627-633
[54]Bang H,Tahk M J,Choi H D.Large angle attitude control of spacecraft with actuator saturation.Control Engineering Practice,2003,11(9): 989-997
[55]Lv J T,Gao D,Cao X B.Satellite attitude tracking control under control saturation.In:Proceedings of the 2nd International Symposium on Systems and Control in Aerospace and Astronautics.Shenzhen,China: IEEE,2008.1-5
[56]Lv Jian-Ting,Ma Guang-Fu,Li Chuan-Jiang.Output feedback controller design for satellite attitude regulation subject to control saturation.Journal of Astronautics,2008,29(4):1320-1323(in Chinese)
[57]Lv Jian-Ting,Gao Dai.Coordinated attitude output feedback control of satellite formation fl ying.Journal of Astronautics,2010,31(12): 2691-2696(in Chinese)
[58]Lyu J T,Gao D.Attitude synchronization for multiple spacecraft with input constraints.Chinese Journal of Aeronautics,2014,27(2):321-327
[59]Bacconi F,Mosca E,Casavola A.Hybrid constrained formation fl ying control of micro-satellites.IET Control Theory and Applications,2007, 1(2):513-521
[60]Mehrabian A R,Tafazoli S,Khorasani K.Quaternion-based attitude synchronization and tracking for spacecraft formation subject to sensor and actuator constraints.In:Proceedings of the 2010 AIAA Guidance, Navigation,and Control Conference.Toronto,Ontario Canada:AIAA, 2010.1-21
[61]Lv Y Y,Hu Q L,Ma G F,Zhou J K.6 DOF synchronized control for spacecraft formation fl ying with input constraint and parameter uncertainties.ISA Transactions,2011,50(4):573-580
[62]Zhang Bao-Qun,Song Shen-Min,Chen Xing-Lin.Attitude coordination control of formation fl ying satellites under control saturation.Journal of Astronautics,2011,32(5):1060-1069(in Chinese)
[63]Zou A M,Kumar K D.Neural Network-based distributed attitude coordination control for spacecraft formation fl ying with input saturation.IEEE Transactions on Neural Networks and Learning Systems,2012,23(7): 1155-1162
[64]de Ferr´an S X.The ISO Spacecraft.ESA Bulletin,1991,84:17-24
[65]Kim Y,Mesbahi M,Singh G,Hadaegh F Y.On the constrained attitude control problem.In:Proceedings of the 2004 AIAA Guidance, Navigation,and Control Conference and Exhibit.Providence,Rhode Island,2004.1-23
[66]Kim Y,Mesbahi M.Quadratically constrained attitude control via semide fi nite programming.IEEE Transactions on Automatic Control, 2004,49(5):731-735
[67]Kim Y,Mesbahi M,Singh G,Hadaegh F Y.On the convex parameterization of constrained spacecraft reorientation.IEEE Transactions on Aerospace and Electronic Systems,2010,46(3):1097-1109
[68]Okoloko I,Kim Y.Attitude synchronization of multiple spacecraft with cone avoidance constraints.Systems and Control Letters,2014,69: 73-79
[69]Koditschek D E,Rimon E.Robot navigation functions on manifolds with boundary.Advances in Applied Mathematics,1990,11(4):412-442
[70]Xu R,Cheng X J,Cui H T.Autonomous pointing avoidance of spacecraft attitude maneuver using Backstepping control method.In: Proceedings of the 2011 International Conference on Electric and Electronics:Electrical Engineering and Control,Lecture Notes in Electrical Engineering.Nanchang,China:Springer,2011,98:817-825
[71]McInnes C R.Large angle slew maneuvers with autonomous sun vector avoidance.Journal of Guidance,Control,and Dynamics,1994,17(4): 875-877
[72]Garcia I,How J P.Trajectory optimization for satellite recon fi guration maneuvers with position and attitude constraints.In:Proceedings of the 2005 American Control Conference.2005.889-894
[73]Cheng Xiao-Jun,Cui Hu-Tao,Cui Ping-Yuan,Xu Rui.A predictive control algorithm for spacecraft attitude maneuver with non-convex geometric constraint.Journal of Astronautics,2011,32(5):1070-1076 (in Chinese)
[74]Cui Hu-Tao,Cheng Xiao-Jun.Attitude maneuver control of spacecraft with pointing constraints considering unknown input saturation.Journal of Astronautics,2013,34(3):377-383(in Chinese)
[75]Zheng Zhong,Song Shen-Min,Zhang Bao-Qun.Spacecraft safe attitude tracking control by considering attitude forbidden constraint.Systems Engineering and Electronics,2013,35(3):574-579
[76]Ren W.Formation keeping and attitude alignment for multiple spacecraft through local interactions.Journal of Guidance,Control,and Dynamics, 2007,30(2):633-638
[77]Ren W.Distributed attitude synchronization for multiple rigid bodies with Euler-Lagrange equations of motion.In:Proceedings of the 46th IEEE Conference of Decision and Control.New Orleans,LA:IEEE, 2007.2363-2368
[78]Ren W.Distributed cooperative attitude synchronization and tracking for multiple rigid bodies.IEEE Transactions on Control Systems Technology,2010,18(2):383-392
[79]Zhang H B,Mei J,Ma G F.Attitude coordinated tracking for formation spacecraft under a directed graph.In:Proceedings of the 30th Chinese Control Conference.Yantai,China:IEEE,2011.4900-4905
[80]Wu B L,Wang D W,Poh E K.Decentralized robust adaptive control for attitude synchronization under directed communication topology.Journal of Guidance,Control,and Dynamics,2011,34(4):1276-1282
[81]Li Z K,Duan Z S.Distributed adaptive attitude synchronization of multiple spacecraft.Science China Technological Sciences,2011,54(8): 1992-1998
[82]Thunberg J,Song W J,Hu X M.Distributed attitude synchronization control of multi-agent systems with directed topologies.In:Proceedings of the 10th World Congress on Intelligent Control and Automation. Beijing,China:IEEE,2012.958-963
[83]Meng Z Y,You Z,Li G H,Fan C S.Cooperative attitude control of multiple rigid bodies with multiple time-varying delays and dynamically changing topologies.Mathematical Problems in Engineering,2010, 2010:Article ID 621594,DOI:10.1155/2010/621594
[84]Jin E D,Sun Z W.Robust attitude synchronisation controllers design for spacecraft formation.IET Control Theory and Applications,2009,3(3): 325-339
[85]Bi Peng,Luo Jian-Jun,Zhang Bo.Cooperate control algorithm for spacecraft formation fl ying based on consensus theory.Journal of Astronautics,2010,31(1):70-74(in Chinese)
[86]Sarlette A,Sepulchre R,Leonard N E.Autonomous rigid body attitude synchronization.Automatica,2009,45(2):572-577
[87]Zhang Bao-Qun,Song Shen-Min,Chen Xing-Lin.Robust coordinated control for formation fl ying satellites with time delays and switching topologies.Journal of Astronautics,2012,33(7):910-919(in Chinese)
[88]Thunberg J,Song W J,Montijano E,Hong Y G,Hu X M.Distributed attitude synchronization control of multi-agent systems with switching topologies.Automatica,2014,50(3):832-840
[89]Song W J,Hong Y G,Hu X M.Distributed relative attitude formation control of multiple rigid-body agents with switching topologies.In: Proceedings of the 32nd Chinese Control Conference.Xi′an,China: IEEE,2013.7125-7130
[90]Chen S,Shi P,Zhang W G,Zhao L D.Finite-time consensus on strongly convex balls of Riemannian manifolds with switching directed communication topologies.Journal of Mathematical Analysis and Applications, 2014,409(2):663-675
[91]Windeknecht T G.Optimal stabilization of rigid body attitude.Journal of Mathematical Analysis and Applications,1963,6(2):325-335
[92]Dixon M V,Edelbaum T N,Potter J E,Vandervelde W E.Fuel optimal reorientation of axisymmetric spacecraft.Journal of Spacecraft and Rockets,1970,7(11):1345-1351
[93]Vadali S R,Junkins J L.Spacecraft large angle rotational maneuvers with optimal momentum transfer.Journal of the Astronautical Sciences, 1983,31(2):217-235
[94]VadMi S R,Kraige L G,Junkins J L.New results on the optimal spacecraft attitude maneuver problem.Journal of Guidance,Control,and Dynamics,1984,7(3):378-380
[95]Yang C C,Li C L,Wu C J.Minimal energy maneuvering control of a rigid spacecraft with momentum transfer.Journal of the Franklin Institute,2007,344(7):991-1005
[96]Zhang Shi-Feng,Qian Shan,Li Peng-Kui.Study on the minimal energy maneuvering control of a rigid spacecraft with momentum transfer.Journal of Astronautics,2009,30(4):1504-1509(in Chinese)
[97]Scrivener S L,Thomson R C.Survey of time-optimal attitude maneuvers.JournalofGuidance,Control,andDynamics,1994,17(2):225-233
[98]Yan H.Dynamics and Real-Time Optimal Control of Satellite Attitude and Satellite Formation Systems[Ph.D.dissertation],Texas A&M University,USA,2006
[99]Dimarogonas D V,Tsiotras P,Kyriakopoulos K J.Leader-follower cooperative attitude control of multiple rigid bodies.SystemsandControl Letters,2009,58(6):429-435
[100]Ji M,Ferrari-Trecate G,Egerstedt M,Buffa A.Containment control in mobile networks.IEEE Transactions on Automatic Control,2008,53(8): 1972-1975
[101]Meng Z Y,Ren W,You Z.Distributed fi nite-time attitude containment control for multiple rigid bodies.Automatica,2010,46(12):2092-2099
[102]Zhang An-Hui,Kong Xian-Ren,Zhang Shi-Jie,Wang Feng.Distributed attitude cooperative control with multiple leaders.Journal of Harbin Institute of Technology,2013,45(3):1-6(in Chinese)
[103]Yu S H,Yu X H,Shirinzadeh B,Man Z H.Continuous fi nite-time control for robotic manipulators with terminal sliding mode.Automatica, 2005,41(11):1957-1964
[104]Cao Y C,Ren W,Meng Z Y.Decentralized fi nite-time sliding mode estimators and their applications in decentralized fi nite-time formation tracking.Systems&Control Letters,2010,59(9):522-529
[105]Jin E D,Sun Z W.Robust controllers design with fi nite time convergence for rigid spacecraft attitude tracking control.Aerospace Science and Technology,2008,12(4):324-330
[106]Zou A M,Kumar K D,Hou Z G,Liu X.Finite-time attitude tracking control for spacecraft using terminal sliding mode and Chebyshev Neural Network.IEEE Transactions on Systems,Man,and Cybernetics-Part B: Cybernetics,2011,41(4):950-963
[107]Zou A M,Kumar K D,Hou Z G.Corrections to“Finite-time attitude tracking control for spacecraft using terminal sliding model and Chebyshev Neural Network”.IEEE Transactions on Cybernetics,2013,43(2): 803
[108]Du H B,Li S H,Qian C J.Finite-time attitude tracking control of spacecraft with application to attitude synchronization.IEEE Transactions on Automatic Control,2011,56(11):2711-2717
[109]Zou A M,Kumar K D.Distributed attitude coordination control for spacecraft formation fl ying.IEEE Transactions on Aerospace and Electronic Systems,2012,48(2):1329-1346
[110]Liang H Z,Sun Z W,Wang J Y.Finite-time attitude synchronization controllers design for spacecraft formations via behavior-based approach.Journal of Aerospace Engineering,2013,227(11):1737-1753
[111]Liang H Z,Sun Z W,Wang J Y.Robust decentralized attitude control of spacecraft formations under time-varying topologies,model uncertainties and disturbances.ActaAstronautica,2012,81(2):445-455
[112]Ma G F,Zhang H B,Mei J.Distributed fi nite-time attitude regulation control for multiple spacecraft systems.In:Proceedings of the 31st Chinese Control Conference.Hefei,China:IEEE,2012.6439-6443
[113]Lyu J T,Gao D.Attitude synchronization for multiple spacecraft with input constraints.Chinese Journal of Aeronautics,2014,27(2):321-327 58
[114]Zhou N,Xia Y Q,Lu K F.Attitude synchronization of rigid spacecraft using terminal sliding mode.In:Proceedings of the 32nd Chinese Control Conference.Xi′an,China:IEEE,2013.706-711
[115]Cort´es J.Finite-time convergent gradient fl ows with applications to network consensus.Automatica,2006,42(11):1993-2000
[116]Chen G,Lewis F L,Xie L H.Finite-time distributed consensus via binary control protocols.Automatica,2011,47(9):1962-1968
[117]Hui Q.Finite-time rendezvous algorithms for mobile autonomous agents.IEEE Transactions on Automatic Control,2011,56(1):207-211
[118]Yu X H,Xu J X.Variable structure systems:towards the 21st century.Lecture Notes in Control and Information Sciences.Berlin,Heidelberg: Springer-Verlag,2002.
[119]Jin Yong-Qiang,Liu Xiang-Dong,Hou Chao-Zhen.Adaptive sliding mode control of large attitude angle maneuver for spacecraft.Transactions of Beijing Institute of Technology,2007,27(5):422-426(in Chinese)
[120]Cong B L,Liu X D,Chen Z.Exponential time-varying sliding mode control for large angle attitude eigenaxis maneuver of rigid spacecraft.Chinese Journal of Aeronautics,2010,23(4):447-453
[121]Lu K F,Xia Y Q,Zhu Z,Basin M V.Sliding mode attitude tracking of rigid spacecraft with disturbances.Journal of the Franklin Institute, 2012,349(2):413-440
[122]Pukdeboon C,Zinober A S I,Thein M-W L.Quasi-continuous higher order sliding-mode controllers for spacecraft-attitude-tracking maneuvers.IEEE Transactions on Industrial Electronics,2010,57(4): 1436-1444
[123]Ma K M.Comments on“Quasi-continuous higher order sliding-mode controllers for spacecraft-attitude-tracking maneuvers”.IEEE Transactions on Industrial Electronics,2012,60(7):2771-2773
[124]Wu Y H,Cao X B,Zheng P F,Zeng Z K.Variable structure-based decentralized relative attitude-coordinated control for satellite formation.IEEEAerospaceandElectronicSystemsMagazine,2012,27(12):18-25
[125]Wu B L,Wang D W,Poh E K.Decentralized sliding-mode control for attitude synchronization in spacecraft formation.International Journal of Robust and Nonlinear Control,2013,23(11):1183-1197
[126]Yang D P,Liu X D,Li Z K,Guo Y H.Distributed adaptive sliding mode control for attitude tracking of multiple spacecraft.In:Proceedings of the 32nd Chinese Control Conference.Xi′an,China:IEEE,2013. 6917-6922
[127]Zhou Y R,Huo W.Quaternion-based direct adaptive fuzzy predictive control for attitude tracking of satellites.In:Proceedings of the 2009 IEEE International Conference on Intelligent Computing and Intelligent Systems.Shanghai China:IEEE,2009.510-516
[128]Guan P,Liu X H,Zhang W,Xue L.The direct adaptive fuzzy robust control for satellite attitude control.In:Proceedings of the 10th World Congress on Intelligent Control and Automation.Beijing,China:IEEE, 2012.36-41
[129]Rumelhart D E,McClelland J L.Parallel Distributed Processing: Explorations in the Microstructure of Cognition,Vol.1:Foundations. Cambridge,MA:MIT Press,1986.318-362
[130]Lee T T,Jeng J T.The Chebyshev-polynomials-based uni fi ed model neural networks for function approximation.IEEE Transactions on Systems,Man,and Cybernetics,Part B:Cybernetics,1998,28(6):925-935
[131]Hou Z G,Cheng L,Tan M.Decentralized robust adaptive control for the multiagent system consensus problem using Neural Networks.IEEE Transactions on Systems,Man,and Cybernetics,Part B:Cybernetics, 2009,39(3):636-647
[132]Cheng L,Hou Z G,Tan M,Lin Y Z,Zhang W J.Neural-networkbased adaptive leader-following control for multiagent systems with uncertainties.IEEE Transactions on Neural Networks,2010,21(8): 1351-1358
[133]Zou A M,Kumar K D,Hou Z G.Quaternion-based adaptive output feedback attitude control of spacecraft using Chebyshev neural networks.IEEE Transactions on Neural Networks,2010,21(9):1457-1471
[134]Zou A M.Distributed attitude synchronization and tracking control for multiple rigid bodies.IEEE Transactions on Control Systems Technology,2014,22(2):478-490
[135]Zou A M,Kumar K D.Quaternion-based distributed output feedback attitude coordination control for spacecraft formation fl ying.Journal of Guidance,Control,and Dynamics,2013,36(2):548-556
[136]Ball R S.A Treatise on the Theory of Screws.Cambridge:Cambridge University Press,1900.
[137]Funda J,Taylor R H,Paul R P.On homogeneous transforms,quaternions,and computational ef fi ciency.IEEE Transactions on Robotics and Automation,1990,6(3):382-388
[138]Yang A T.Application of Quaternion Algebra and Dual Numbers to the Analysis of Spatial Mechanisms[Ph.D.dissertation],Columbia University,New York,USA,1963.
[139]Aspragathos N A,Dimitros J K.A comparative study of three methods for robot kinematics.IEEE Transactions on Systems,Man,and Cybernetics,Part B:Cybernetics,1998,28(2):135-145
[140]Dooley J R,McCarthy J M.Spatial rigid body dynamics using dual quaternion components.In:Proceedings of the 1991 IEEE International Conference on Robotics and Automation.Sacramento,California:IEEE, 1991.90-95
[141]Zhang F,Duan G R.Robust integrated translation and rotation fi nitetime maneuver of a rigid spacecraft based on dual quaternion.In: Proceedings of the 2011 AIAA Guidance,Navigation,and Control Conference.Portland,Oregon:the 2011 AIAA,2011.1-17
[142]Wu J J,Liu K,Han D P.Adaptive sliding mode control for six-DOF relative motion of spacecraft with input constraint.Acta Astronautica, 2013,87:64-76
[143]Wang X K,Yu C B,Lin Z Y.A dual quaternion solution to attitude and position control for rigid-body coordination.IEEE Transactions on Robotics,2012,28(5):1162-1170
[144]Sarlette A,Sepulchre R,Leonard N E.Cooperative attitude synchronization in satellite swarms:a consensus approach.In:Proceedings of the 17th IFAC Symposium on Automatic Control Aerospace.Toulouse, France:IFAC,2007.223-228
[145]Igarashi Y,Hatanaka T,Fujita M,Spong M W.Passivity-based attitude synchronization in SE(3).IEEE Transactions on Control Systems Technology,2009,17(5):1119-1134
[146]Chang I,Park S Y,Choi K H.Decentralized coordinated attitude control for satellite formation fl ying via the state-dependent Riccati equation technique.International Journal of Non-Linear Mechanics,2009,44(8): 891-904
[147]Jung J,Park S Y,Kim S W,Eun Y H,Chang Y K.Hardware-in-theloop simulations of spacecraft attitude synchronization using the State-Dependent Riccati Equation technique.Advances in Space Research, 2013,51(3):434-449
[148]Felicetti L,Palmerini G B.Coordinated attitude control for multiple heterogeneous satellites missions.In:Proceedings of the 2011 AIAA/AAS Astrodynamics Specialist Conference.Minneapolis,Minnesota:AIAA,2012.1-19
[149]Min H B,Wang S C,Sun F C,Gao Z J,Zhang J S.Decentralized adaptive attitude synchronization of spacecraft formation.Systems and Control Letters,2012,61(1):238-246
[150]Mayhew C G,Sanfelice R G,Sheng J,Arcak M,Teel A R.Quaternionbased hybrid feedback for robust global attitude synchronization.IEEE Transactions on Automatic Control,2012,57(8):2122-2127
[151]Sarlette A,Lageman C.Synchronization with partial state coupling on SO(n).SIAM Journal on Control and Optimization,2012,50(6): 3242-3268
[152]Mayhew C G,Sanfelice R G,Teel A R.On path-lifting mechanisms and unwinding in quaternion-based attitude control.IEEE Transactions on Automatic Control,2013,58(5):1179-1191
[153]Zhang K W,Demetriou M A.Attitude synchronization of spacecraft formation with adaptation of consensus penalty terms.In:Proceedings of the 2013 European Control Conference.Z¨urich,Switzerland:EUCA, 2013.3833-3838
[154]Zheng Z,Song S M.Attitude coordination control of spacecraft formation fl ying using rotation matrix.In:Proceedings of the 32nd Chinese Control Conference.Xi′an,China:IEEE,2013.6891-6895
[155]Huang M Y,Manton J H.Coordination and consensus of networked agents with noisy measurement:Stochastic algorithms and asymptotic behavior.SIAM Journal on Control and Optimization,2009,48(1): 134-161
[156]Kar S,Moura J M F.Distributed consensus algorithms in sensor networks with imperfect communication:link failures and channel noise.IEEE Transactions on Signal Processing,2009,57(1):355-369
[157]Li T,Zhang J F.Consensus conditions of multi-agent systems with time-varying topologies and stochastic communication noises.IEEE Transactions on Automatic Control,2010,55(9):2043-2057
[158]Li T,Zhang J F.Mean square average-consensus under measurement noises and fi xed topologies:necessary and suf fi cient conditions.Automatica,2009,45(8):1929-1936
[159]Cheng L,Hou Z G,Tan M.A mean square consensus protocol for linear multi-agent systems with communication noises and fi xed topologies.IEEE Transactions on Automatic Control,2014,59(1):261-267
[160]Wang J,Elia N.Distributed averaging under constraints on information exchange:emergence of L´evy fl ights.IEEE Transactions on Automatic Control,2012,57(10):2435-2449
[161]Wang J,Elia N.Mitigation of complex behavior over networked systems:analysis of spatially invariant structures.Automatica,2013, 49(6):1626-1638
[162]Aysal T C,Barner K E.Convergence of consensus models with stochastic disturbances.IEEE Transactions on Information Theory,2010, 56(8):4101-4113
[163]Medvedev G S.Stochastic stability of continuous time consensus protocols.SIAM Journal on Control and Optimization,2012,50(4): 1859-1885

Long Ma Ph.D.candidate at the Second Artillery Engineering University.He received the bachelor and M.Sc.degrees from the Second Artillery Engineering University in 2009 and in 2011,respectively.His research interests include multi-agent coordination control and spacecraft attitude control. Corresponding author of this paper.
Haibo Min Ph.D.,lecturer at the Second Artillery Engineering University.He received the M.Sc.and Ph.D.degrees from the Second Artillery Engineering University in 2007 and in 2011,respectively.His research interests include multi-agent coordination control and spacecraft formation control.
Shicheng Wang Ph.D.,professor and doctoral supervisor at the Second Artillery Engineering University.He is also a member of Free Software Association,Institute of Automation,Chinese Academy of Sciences.He received the Ph.D.degree form the Second Artillery Engineering University in 1998. His research interests include navigation,guidance and control,control theory and engineering,complex systems modeling and simulation.
Yuan Liu Ph.D.,engineer at the Second Artillery Engineering University.He received the M.Sc.and Ph.D.degrees from the Second Artillery Engineering University in 2009 and in 2014,respectively.His research interests include multi-agent coordination control,spacecraft formation control and consensus control of multiple mechanical systems.

Shouyi Liao Associate professor at the Second Artillery Engineering University.He received his Ph.D. degree from the National University of Defense Technology in 2005.His research interests include complex systems modeling and simulation,precision guidance and control.
t
July 21,2014;accepted November 17,2014.This work was supported by National Natural Science Foundation of China(61203354) and Industrial Project of Shaanxi Province(2012GY2-34).Recommended by Associate Editor Jinhu Lv.
:Long Ma,Haibo Min,Shicheng Wang,Yuan Liu,Shouyi Liao.An overview of research in distributed attitude coordination control.IEEE/CAA Journal of Automatica Sinica,2015,2(2):121-133
Long Ma,Haibo Min,Shicheng Wang,Yuan Liu,and′Shouyi Liao are with the Second Artillery Engineering University,Xian,Shaanxi 710025,China(e-mail:@163.com;mhbzm2010@163.com; wshcheng@vip.163.com;@163.com;shouyilao@gmail.com).
杂志排行

IEEE/CAA Journal of Automatica Sinica的其它文章
- Single Image Fog Removal Based on Local Extrema
- Operation Ef fi ciency Optimisation Modelling and Application of Model Predictive Control
- Cloud Control Systems
- Stable Estimation of Horizontal Velocity for Planetary Lander with Motion Constraints
- Production Line Capacity Planning Concerning Uncertain Demands for a Class of Manufacturing Systems with Multiple Products
- Consensus Seeking for Discrete-time Multi-agent Systems with Communication Delay