基于敏感传递函数的分数阶PIλ 控制器的参数整定
2015-08-09天津科技大学电子信息与自动化学院天津300222
(天津科技大学电子信息与自动化学院,天津 300222)
(天津科技大学电子信息与自动化学院,天津 300222)
讨论一种基于敏感传递函数的分数阶PIλ控制器的参数整定方法.根据敏感传递函数的定义,采用代数方法,对固定的PIλ控制器的积分阶次,在比例增益和积分增益参数平面上,按敏感传递函数的界进行PIλ控制器的参数整定.该敏感传递函数的界与系统的幅值裕度和相角裕度直接相关,给出了系统相对稳定性的信息.仿真实例表明,利用该方法设计的PIλ控制器具有良好的动态性能和鲁棒性.
分数阶PIλ控制器;敏感传递函数;参数整定
分数阶控制系统的相关研究近年来受到广泛的关注[1-2],特别是分数阶PID控制器的研究[3-5]具有明显的工程实际意义.众所周知,常规(整数阶)PID控制器在工业过程控制领域获得了广泛应用.采用分数阶PID控制器,由于增加了设计的自由度,可以取得比整数阶PID更好的动态性能和对参数变化的鲁棒性.幅值裕度和相角裕度作为相对稳定性的度量,在经典控制理论中已进行了大量的讨论.相角裕度与时域动态性能(超调量)直接相关,而幅值裕度则反映系统对参数变化的鲁棒性.
本文讨论基于敏感传递函数的分数阶PIλ控制器的参数整定方法.该敏感传递函数的界给出了幅值裕度和相角裕度的信息.通过一种代数方法求解PIλ控制器的参数,并用仿真实例进行验证.
1 敏感传递函数
考虑图 1所示SISO单位反馈系统,其中 G(s)为被控对象,C (s)为控制器,R (s)为参考输入,Y(s)为输出,E (s)为跟踪误差.敏感传递函数 S(s)定义为

它代表系统对参考输入信号的跟踪精度.考虑频率特性 (j)Sω的最大值

其物理意义是,开环 Nyquist曲线到系统临界稳定点(-1,j0)的最短距离的倒数,典型取值范围为(1,2)[6].进一步,文献[7]将式(2)的极大化问题转换为在整个频率范围内对敏感传递函数进行约束
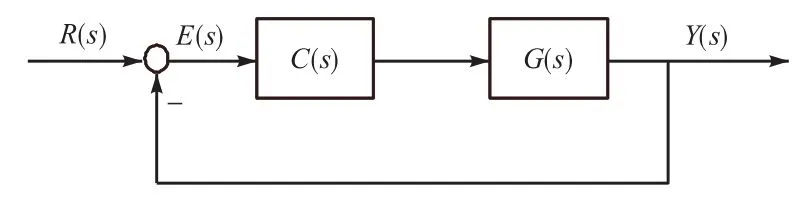
图1 单位反馈系统Fig. 1 Unity feedback system

式中 1M> .根据这一条件,当M→∞时,式(3)成为闭环特征方程

事实上,式(3)的敏感传递函数不等式约束与系统的幅值裕度和相角裕度直接相关[7]:
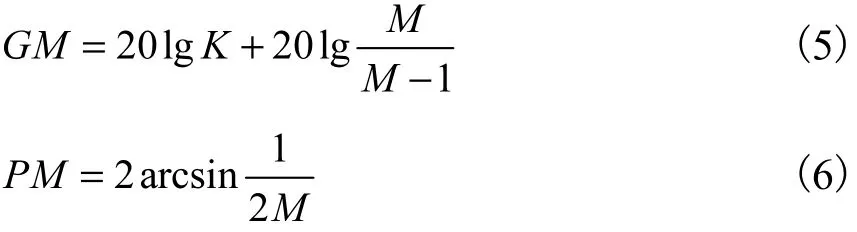
式中 1K≥ 为系统的开环增益.因此,式(3)不等式是对系统鲁棒性的一种比幅值裕度和相角裕度更强的度量,因为它不只是在 2个穿越频率(相角穿越频率和幅值穿越频率)处对敏感传递函数进行界定,而是在所有频率处对其进行约束.
2 控制器参数整定
设图1中被控对象的传递函数为?

式中:D (s)和 N(s)为整数阶或分数阶多项式;L ≥0为时滞因子.控制器为如下分数阶PIλ形式

式中:pk和ik分别为比例增益和积分增益;0 2λ< <为积分阶次.为设计方便,对式(8)的控制器进行如下变换



代入式(10),有

由式(3)可得

定义函数

.再由式(11),f1(ω)可写为

其中
式(13)定义了一个极值问题,当在某一频率下,等号成立时,1()fω达到极小值.由极值条件可得

其中

联立求解方程组
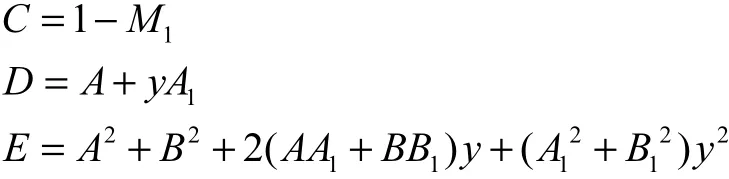
消去2x后,得到

其中


将式(15)代入式(13)中的 f1(ω)= 0,整理得关于参数y的6次方程

其中

可按如下方法求解参数对(x,y):在适当选取的频率ω下,解关于y的6次方程(16),得出6个解,分别代入式(15),得相应的x.然后,根据参数变换公式kp= x,ki= xy解得参数对 (kp,ki).所需要的解应该是落在参数稳定域(令M→∞可得)内的实数解.对适当选取的频率范围,参数对(kp(ω) ,ki(ω))在稳定域内描绘出一条满足敏感传递函数界 M>1的曲线.
3 仿真实例
考虑单容水箱传递函数[9]

在图 1所示控制系统中,采用式(8)给定的分数阶PIλ控制器,文献[8]讨论了PIλ控制器分数阶次λ与(kp,ki)平面上参数稳定域的面积大小之间的关系,结论是λ越小,稳定域面积越大.选取 λ= 0.2,根据前两节的讨论,选取足够大的M值,可得(kp,ki)平面上的参数稳定域,如图2中的虚线所示.再分别取 M=8和 M= 1.46,落在稳定域内的实数解描绘出的曲线分别如图 2中两条实线所示.根据式(5)和式(6),M = 1.46对应的相角裕度约为 40°,幅值裕度约为11,dB.沿 M= 1.46的曲线取点A(见图3),再在曲线内部取点 B,分别作阶跃响应,如图 4所示.由于B点对应的相角裕度大,相应的阶跃响应的超调小.另外,由于控制器的积分阶次较小( λ= 0.2),阶跃响应存在一定的稳态误差,可以采用其他方法进行补偿.
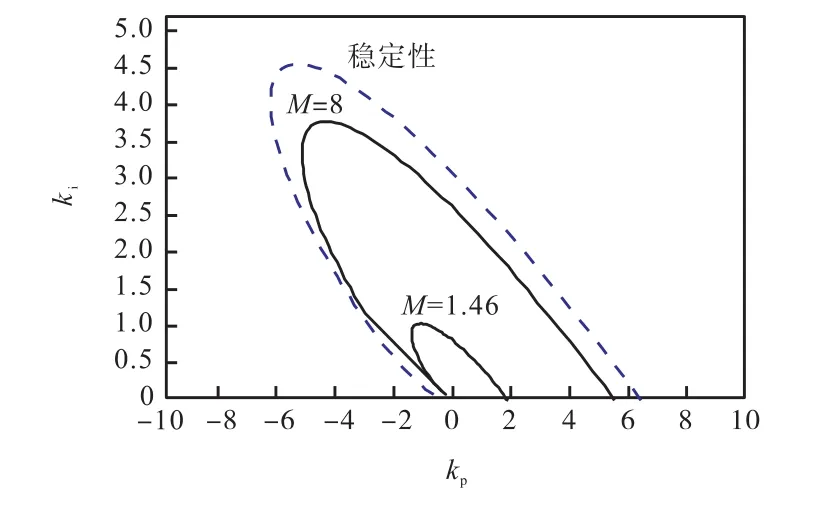
图2 不同M对应的敏感约束Fig. 2 Sensitivity constraint for different M
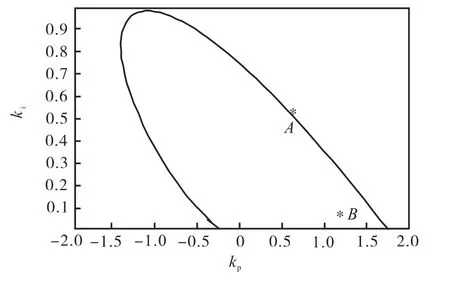
图3 M=1.46对应的敏感约束Fig. 3 Sensitivity constraint for M=1.46
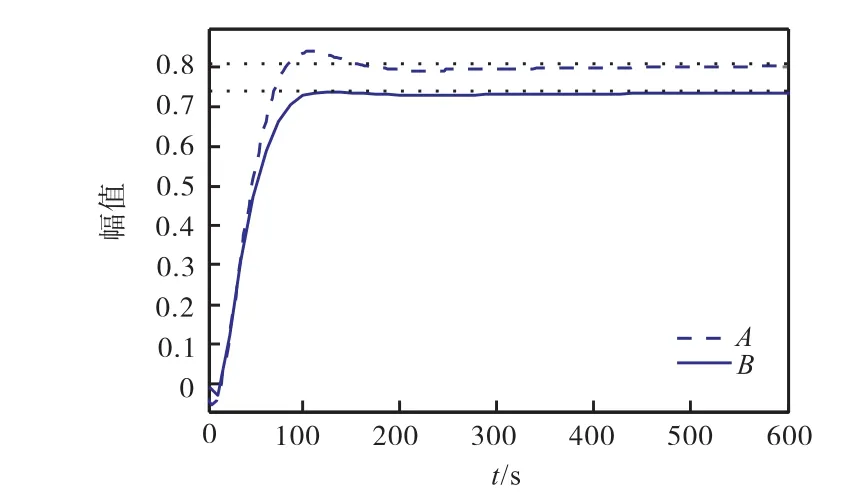
图4 A、B 两点对应的阶跃响应Fig. 4 Step responses corresponding to A and B
4 结 语
本文给出了一种分数阶PIλ控制器的图解参数整定方法,即基于敏感传递函数界的参数整定方法.该方法的特点是控制器的参数选择灵活,所设计的控制器能同时满足相角裕度和幅值裕度的要求,可以直接应用于过程控制领域.
[1] Podlubny I. Fractional Differential Equations[M]. San Diego:Academic Press,1999.
[2] 薛定宇,赵春娜. 分数阶系统的分数阶 PID控制器设计[J]. 控制理论与应用,2007,24(5):771-776.
[3] Podlubny I. Fractional-order systems and PIDλμcontrollers[J]. IEEE Transactions on Automatic Control,1999,44(1):208-214.
[4] Hamamci S E. An algorithm for stabilization of fractional order time-delay systems using fractional order PID controllers[J]. IEEE Transactions on Automatic Control,2007,52(10):1964-1969.
[5] Lou Y,Chen Y Q,Wang C Y,et al. Tuning fractional order proportional integral controllers for fractional order systems[J]. Journal of Process Control,2010,20(7):823-832.
[6] Astrom K J,Panagopoulas H,Hagglund T. Design of PI controllers based on non-convex optimization[J]. Automatica,1998,34(5):585-601.
[7] Yaniv O,Nagurka M. Design of PID controllers satisfying gain margin and sensitivity constraints on a set of plants[J]. Automatica,2004,40(1):111-116.
[8] Wang D,Zhang J. A graphical tuning of PIλcontrollers for fractional order systems[J]. Journal of Control Theory and Applications,2011,9(4):599-603.
[9] 蔡国娟. 液位控制系统分数阶PIλ控制器设计及实验[D]. 天津:天津科技大学,2012.
基于敏感传递函数的分数阶PIλ控制器的参数整定
杨征颖,王德进,史万祺
Parameter Tuning of Fractional-order PIλControllers Based on Sensitivity Constraint
YANG Zhengying,WANG Dejin,SHI Wanqi
(College of Electronic Information and Automation,Tianjin University of Science & Technology,Tianjin 300222,China)
This paper discusses the parameter tuning method of fractional-order PIλcontrollers based on sensitivity transfer function constraint.According to the definition of sensitivity transfer function,in the plane of proportional-integral gains of PIλcontroller,for fixed integral-order,the parameters of the controller are tuned by plotting the sensitivity bound obtained via an algebraic derivation. The bound of sensitivity transfer function is directly related to the gain-margin and the phase-margin of the system,which gives the information on the relative stability of the system. Simulation examplesprove that the designed PIλcontroller can achieve better dynamic performances and robustness.
fractional-order PIλcontrollers;sensitivity transfer functions;parameter tuning
TP273 文献标志码:A 文章编号:1672-6510(2015)02-0057-03
10.13364/j.issn.1672-6510.20140106
2014-07-11;
2014-09-17
国家自然科学基金资助项目(60874028)
杨征颖(1988—),女,河北廊坊人,硕士研究生;通信作者:王德进,教授,wdejin56@sina.com.
常涛