二维作业吊篮
2015-08-01WENJian山西太原龙源电力有限公司山西太原030001
温 建/WEN Jian(山西太原龙源电力有限公司,山西 太原 030001)
二维作业吊篮
温 建/WEN Jian
(山西太原龙源电力有限公司,山西 太原 030001)
[摘 要]针对现有吊篮采用垂直悬吊方式造成水平移动困难,对吊篮稳定和安全造成影响问题,介绍一种二维作业吊篮专利技术,该吊篮采用双边斜吊方式,通过汇集吊点方法和限制作业范围等措施,得到有益效果:悬吊平台可沿作业面多方向运行提高了机动性,作业范围由竖直狭长带拓展为二维作业面提高了作业效率,悬吊平台自行平衡从结构上避免了失稳造成的倾覆事故。
[关键词]高处作业吊篮;二维;作业面;擦窗机
1 技术背景
随着城市化建设的迅速发展,高处作业吊篮(以下简称吊篮)已被广泛用于高层建筑外墙施工、装修等诸多高空作业领域。
现有技术的吊篮都采用垂直悬吊方式只限于上下运行,施工时只能进行竖直方向狭长作业,水平移动时需要先停止运行,通过对悬挂机构的位移来转移作业面,对于较宽的建筑作业面则需要多次位移,或者采用多台吊篮同时运行来弥补水平移动的不足,吊篮的工作效率因此受到影响。
为了适应玻璃幕墙清洗、维护等水平移动频繁的作业需求而推出了擦窗机,擦窗机同样也采用了垂直悬吊方式,其中插杆式擦窗机采用可手动移位的插杆装置,位移方便、结构简单、投入成本低,但它不能水平运行,还需要在屋面设置很多插座;轨道式擦窗机能够水平运行,但需要事先在屋面铺设轨道并配置水平行走的台车,加大了设备的投资。
吊篮和擦窗机采用垂直悬吊方式不仅造成水平移动的困难,同时也对吊篮系统的稳定和安全形成影响。对于普遍使用双边悬挂吊篮,运行中要求双边钢丝绳的作用长度保持相等,双提升机同步运行,才能保证悬吊平台或吊船的平衡,但是吊篮在实际运行中很容易受到重力失衡、钢丝绳打滑、双电机转速差异、电机制动器灵敏度变化等影响,造成悬吊平台或吊船发生倾斜和失稳,如果问题处置不及时或矫正操作不当就有可能导致吊篮倾覆甚至坠落事故。
2 工作原理
建筑施工中起吊重物,都要求钢丝绳垂直于重物的重心,而避免采用斜拉斜吊方式,以防止可能出现的提升机超载或拉断钢丝绳,或发生重物摆动或可能造成碰撞事故,禁止斜拉斜吊被列为起重安全操作规程。
现有技术的吊篮和擦窗机设计都秉承了这种常规理念,无一例外地采用了垂直悬吊方式,忽略或者回避了斜吊的设计模式以及可能带来的益处。深入研究可知,斜吊带来的并非都是弊端,其不利影响和危险及事故也不是必然的,只要遵循一定的运行规则并且采取一定的技术措施,是完全可以取利避弊的。
为此,本文提出了一种能够沿着墙面二维作业运行的吊篮,该吊篮一改惯用的垂直悬吊而采用双边斜吊方式,其工作原理如图1所示。
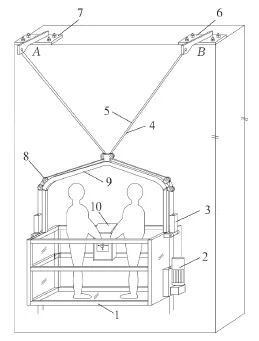
图1 工作原理图
双边悬挂机构分别架设在作业面的两个顶点A、B上,以及建筑屋面的转角处,它们形成固定挂点而无需位移;在悬吊平台上设置龙门架,它将双提升机所构成的两个吊点汇集至悬吊平台的顶部,尽量靠近重心垂线;两个挂点的间距远远大于两个吊点的间距,双钢丝绳从两个挂点斜拉至两个吊点,悬吊平台被平衡地悬吊在其间;作业时操控双提升机分别改变双边钢丝绳的作用长度,驱动悬吊平台在作业面上二维运行,到达作业范围的任意需要位置。
3 结构特点
二维作业吊篮的结构具有如下特点。
1)该吊篮采用双边斜吊方式,吊点汇集使悬吊平台自行平衡,双提升机非同步操控使悬吊平台的运行灵活机动。
2)该吊篮的龙门架与作业面平行,龙门架上转弯处设置导向滑轮用于传导钢丝绳,龙门架的高度大于人的身高,同时满足悬吊平台的平衡与稳定。
3)该吊篮的提升机选用爬升式提升机,作业时依靠绳轮与钢丝绳间的摩擦力来改变钢丝绳的作用长度,驱动悬吊平台运行。
4)该吊篮设置的安全装置,包括在双挂点上设置的安全钢丝绳,其走向和路径与工作钢丝绳并列,在悬吊平台两端对应安装安全锁,安全钢丝绳与安全锁对应配合。当工作钢丝绳的任意一根发生断裂,同一侧的安全锁自动锁住安全钢丝绳,可避免事故发生。
5)该吊篮设置的提升机超载保护装置,通过该装置制止提升机或钢丝绳超载运行,也可避免斜吊倾角过大造成事故。
6)该吊篮设置的限位装置,包括在悬吊平台顶部安装行程开关和钢丝绳端部设置限位装置,用于限制悬吊平台超过预设的极限高度。
7)该吊篮的悬挂机构通过预埋件架设在建筑物或构筑物上,其结构满足吊篮的抗倾覆力矩。
二维作业吊篮的尺寸和载荷能力可根据实际需要进行设计,图2展示为长度2m,载重量300kg的二维作业吊篮。

图2 二维作业吊篮
4 操控运行
二维作业吊篮的操控运行,可采用电控按钮栏内操控或地面无线遥控方式,电控箱和遥控器的外形如图3所示。
电控箱面板上包括两对上升、下降控制按钮,分别控制左、右提升机的正转和反转,对左、右提升机进行不同的操控可使二维吊篮分别向上、下、左、右、左上、右上、左下和右下8个大致方向运行,其控制逻辑如图4所示;无线遥控器设置上、下、左、右和启动、停止六个按键,其控制逻辑也分别对应于图4,无线遥控距离可达120m。
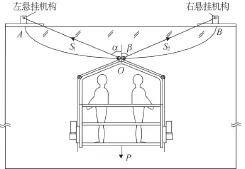
图3 电控箱和遥控器外形

图4 控制逻辑
悬吊平台启动和停止运行时,应当遵循双边钢丝绳同时受力,或者单边钢丝绳受力而另一边钢丝绳保持松弛的操控规则,从而使悬吊平台垂直起降于地面,避免摆动造成可能的碰撞。
5 作业禁区
斜吊的双边钢丝绳垂直倾角分别为α和β,如图5所示,它们产生的水平分力会增大提升机和钢丝绳的受力,当垂直倾角数值过大时容易造成提升机及钢丝绳超载甚至发生断裂事故。
解决的方法包括对提升机设置超载保护装置,限制提升机和钢丝绳的最大受力,当单边提升机或钢丝绳的受力超过悬吊平台总质量P的最大容许值时,切断提升机的上升电路以制止其继续上行。
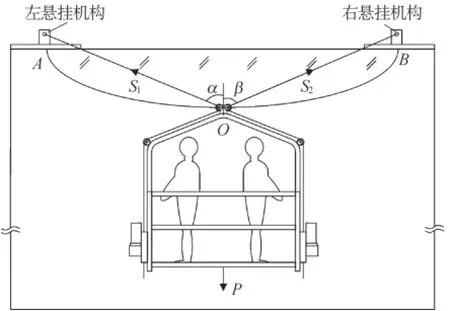
图5 作业禁区示意图
解决方法还包括限制悬吊平台的作业范围,分析表明,双边提升机及钢丝绳的受力大小与悬吊平台的运行位置相关,忽略钢丝绳的重力,根据水平和竖直方向静力平衡可得

式中 S1——左侧钢丝绳受力;
S2——右侧钢丝绳受力;
α——左侧钢丝绳的垂直倾角;
β——右侧钢丝绳的垂直倾角;
P——悬吊平台的总质量。
计算表明,当α和β均小于60°时,双边提升机或钢丝绳的受力S1、S2均不会超过悬吊平台的总质量P;当α和β均为60°时,双边提升机或钢丝绳的受力等于悬吊平台的总质量P;当α 或β有一个倾角大于60°时,有可能出现单边提升机或钢丝绳的受力大于悬吊平台的总质量P。
此时应当注意控制另一个倾角的大小,我们把ABO围成的阴影区域列为作业禁区,禁止悬吊平台进入该区域,可避免吊篮水平分力造成的事故。
通过优选作业面的高宽比值,可以合理控制作业禁区的面积,保证吊篮具有足够的作业范围,计算表明,作业面高宽比值在4~6之间,可使作业范围达到95%以上,能够满足一般工程作业需要。如果作业面过宽或高宽比值偏小,应当适当增加悬挂机构的架设数量,把作业面划分为多个相邻的作业区,从而满足需要的作业范围,反之,高宽比值过大将造成资源的浪费和吊篮工作效率的降低。
6 结 论
二维作业吊篮一改现有吊篮和擦窗机惯用的垂直悬吊方式而采用双边斜吊方式,通过汇集吊点的方法和限制作业范围等措施,得到下列有益效果。
1)悬吊平台犹如蜘蛛可沿作业面多方向运行,到达作业范围的任意需要位置,显著提高了吊篮作业的机动性。
2)吊篮的作业范围由竖直狭长带拓展为二维作业面,减少了设备的水平位移,显著提高了吊篮的作业效率。
3)悬吊平台的平衡取决于自身结构,摆脱了对于双提升机和双边钢丝绳同步运行的依赖,从结构上避免了失稳造成的倾覆事故,显著提高了吊篮作业的安全性。
4)双边斜吊方式减轻了重量失衡、钢丝绳打滑、双电机转速不同步、电磁制动器间隙差异等对于吊篮运行的影响程度,同时还增强了吊篮的侧向抗风能力,提高了吊篮的系统稳定性。
二维作业吊篮可广泛应用于高层建筑外墙施工、玻璃幕墙清洗等吊篮和擦窗机的应用领域;还可用于高楼火灾的消防救援,具有广阔的应用前景。本文对二维作业吊篮的进一步研究、开发和应用提供一定的借鉴。
[参考文献]
[1] GB 19155-2003,高处作业吊篮[S].
[2] GB 19154-2003,擦窗机[S].
[3] 张 华,薛抱新.高处作业吊篮在特殊工程中的应用[J].建筑机械化,2005,(8):44-46.
[4] 高新武.高处作业吊篮[M].徐州:中国矿业大学出版社,2011.
[5] 温 建.二维作业吊篮[P].中国专利:201410358956.9, 2014-07-27.
(编辑 贾泽辉)
[中图分类号]TU976+.42
[文献标识码]B
[文章编号]1001-1366(2015)02-0045-04
[收稿日期]2014-08-10
2D operation core barrel
