太阳能无人机能源管理器研究与设计
2015-08-01时景立冯利军
胡 斌, 时景立, 冯利军
(中国电子科技集团公司第十八研究所,天津300384)
太阳能无人机能源管理器研究与设计
胡 斌, 时景立, 冯利军
(中国电子科技集团公司第十八研究所,天津300384)
对太阳能无人机能源管理器的设计进行了详细的阐述,对能源系统各个工作状态进行了实验验证。该方案设计选用最大功率点跟踪(MPPT)半调节母线拓扑技术,成功实现了对电源系统中太阳阵、锂离子电池以及锂硫电池管理功能,该方案设计电路适应性强,各方面性能均比较理想,对临近空间电源系统具有很好的适用性。
太阳能无人机;能源管理器;MPPT;半调节母线拓扑
随着我国国防事业发展的需要,我国开始大力开发太阳能无人机应用,由于其飞行高度高,滞空时间长,侦察安全且成本低等优势,所以日益成为我国的重要侦察手段[1]。其中能源管理器作为无人机能源系统的控制调节中心,主要功能是实现太阳电池阵输出功率调节,以及对电源系统中的电池组进行管理,为无人机负载提供稳定、充足的能量。图1为太阳能无人机电源系统示意图。
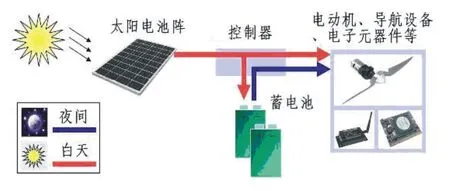
图1 无人机能源系统示意图
1 设计难点及复杂度分析
(1)电流、电压设计峰值出现在不同季节
由于受到季节、环境和大气对流的影响,无人机在夏至和春秋季飞行的时候温度和光照条件差异非常大,这就造成太阳电池阵的电流峰值出现在夏至,而电压峰值出现在春秋季,蓄电池组的容量是恒定的,所以必须合理设计电池阵电压、电流来保证不同季节飞行时电源系统既能输出最大功率又能安全运行[2]。
(2)负载特性复杂
太阳能无人机的主要负载为带螺旋桨的电动机,该负载的特性为调速延迟大,功率过调较高,而且功率需求受环境风速影响会出现大幅度升降现象,所以必须采用快速、简单且具备自适应功能的控制方式来适应负载的变化特性。
(3)全天温度变化较大
无人机在起飞段和最高高度巡航段由于高度差距巨大,造成起飞段和巡航段温度差50℃,电压差10 V左右,所以为了避免太阳电池输出被蓄电池箝位或工作点偏移造成功率损失,电池阵电压按最高温度设计,然后在低温段通过最大功率点跟踪处理保证功率输出不受工作点漂移的影响[3]。
2 设计思路
太阳能无人机电源系统采用高压传输、集中配电、就近转换的电源配电及管理设计思想。大功率、长距离传输电能采用高压传输,尽量减少传输损耗;DC/DC转换电路及控制电路尽量设置在用电仪器和设备附近,就近转换供电。能源供给系统拓扑结构为了降低风险,同时提高能源管理器的控制效率采用MPPT系统供电母线为电机供电。MPPT电路采用分布式的方式进行能源管理,其使用数量由太阳方阵发电功率需求来决定。
2.1 系统配置组成
能源管理系统提供一条110~150 V的动力母线,机载设备电源控制部分通过动力母线二次变换获得。能源供给系统主要由太阳电池阵发电单元、锂离子电池组、锂硫电池组和电源控制与管理(PCU)系统组成。
能源管理部分采用MPPT母线体制,实现对太阳电池阵功率的最大跟踪输出,储能电池组串联二极管并联在母线上,而机载设备电源控制部分通过动力母线二次变换获得。当太阳电池阵输出功率不足时,实现锂离子电池和锂硫电池选择性放电控制进行联合供电(图2,表1)。
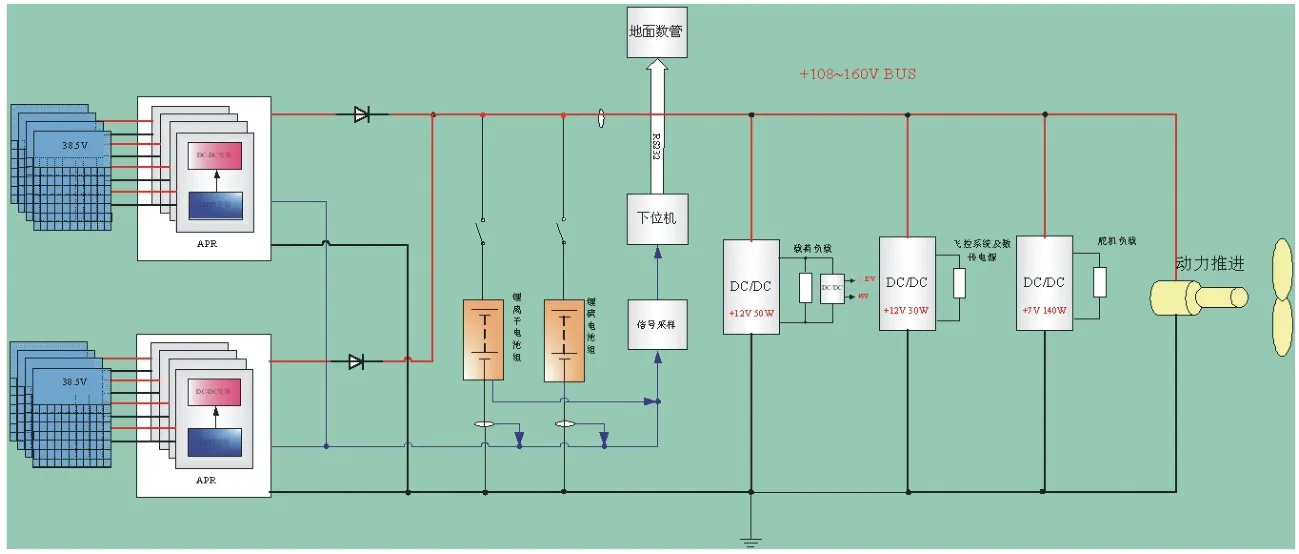
图2 能源管理器系统示意图

表1 能源管理器功能组成
2.2 MPPT控制电路设计
能源管理器的作用是实现太阳电池阵最大功率点跟踪[4]、蓄电池的自适应放电、负载电压变化跟随。其核心是通过一个最大功率点跟踪芯片,通过驱动电路驱动一个DC/DC变换电路,使能源管理器在输入侧实时跟踪太阳电池组件的最大功率点,保证太阳电池组件峰值输出,输出侧自动适应负载电压变化(图3),母线电压跟随蓄电池变化,这样可将系统结构简化到最小程度,同时又能保证太阳电池阵最大功率输出。
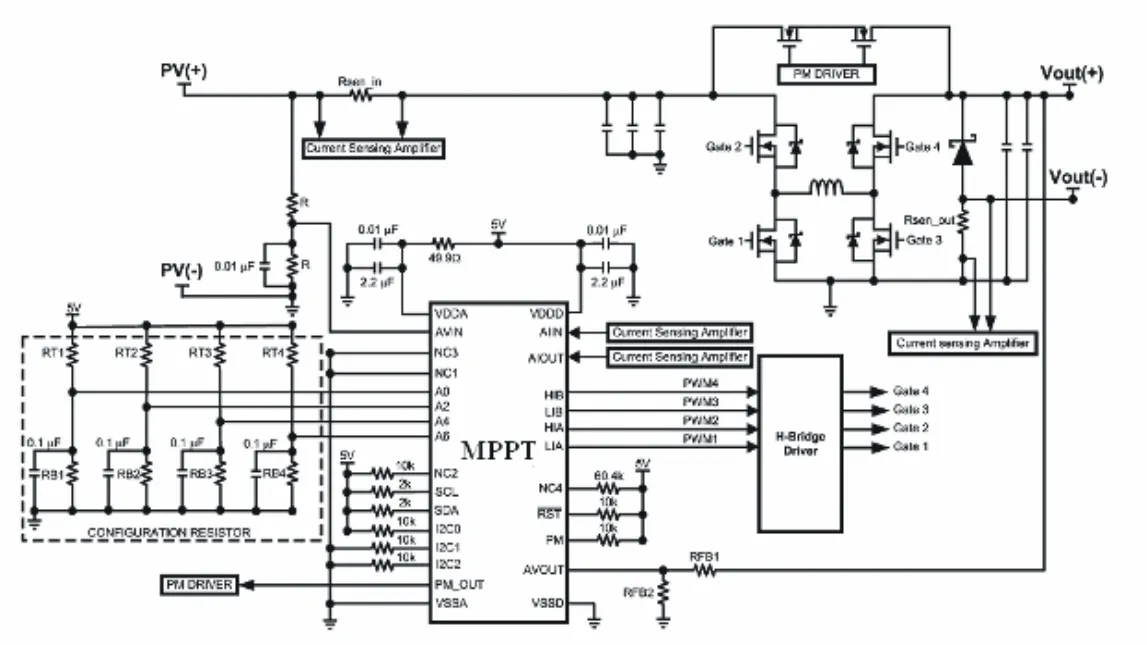
图3 MPPT管理器电路原理图
MPPT能源管理器即可以工作于降压搜索MPP模式,也可以工作于升压搜索MPP模式,这主要通过DC/DC实现,其工作原理简图如图4所示。
(a)MPPT控制模块工作于升压搜索工作点状态
MPPT能源管理器会通过DC/DC电路对输入能量进行升压降流变换 (图5),变换过程中Q4、Q3调节、Q1常开、Q2关断,在一个开关周期内电感上伏秒平衡,则得到如下平衡公式


(b)MPPT控制模块工作于降压搜索工作点状态
MPPT能源管理器会通过DC/DC电路对输入能量进行降压升流变换 (图6),变换过程中Q1、Q2调节、Q4常开、Q3关断,在一个开关周期内电感上电压平衡,则得到如下平衡公式:


(c)MPPT能源管理器工作于直连模式
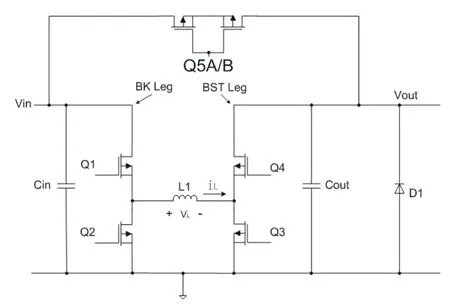
图4 DC/DC电路工作原理图
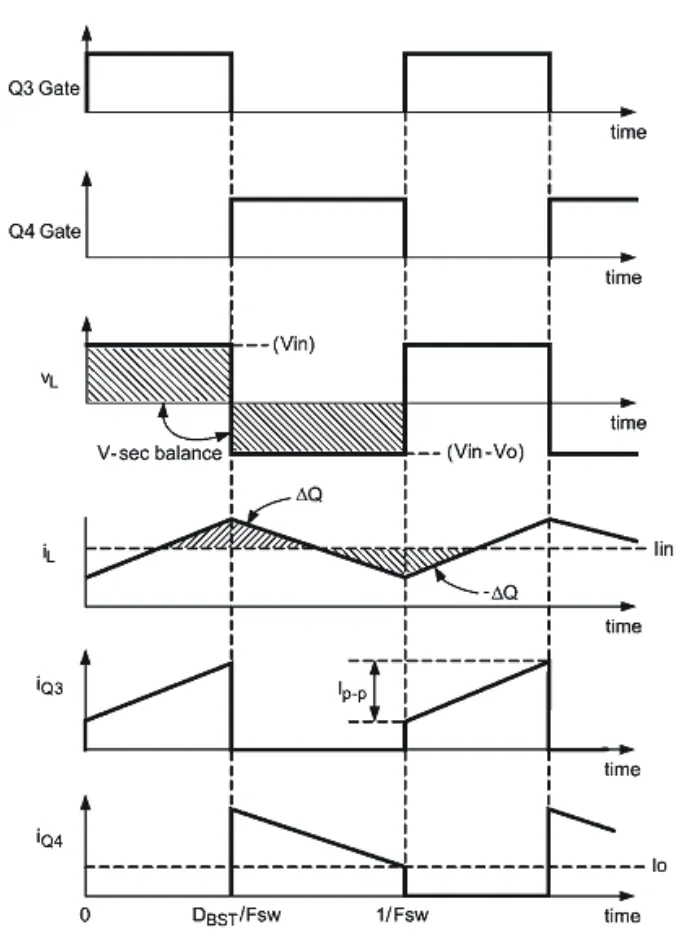
图5 升压模式DC/DC工作曲线
MPPT能源管理器在温度、电压、电流超限和电路电流为0时,将电池阵和负载通过Q5直连,另外如果负载运行于经济状态,即(Vout-Vm)在规定的误差范围内可认为负载可保证电池阵工作于最佳状态,此时也通过Q5将电池阵和负载直连,这样可有效提高系统效率(此时能量损失仅为导线损失)。
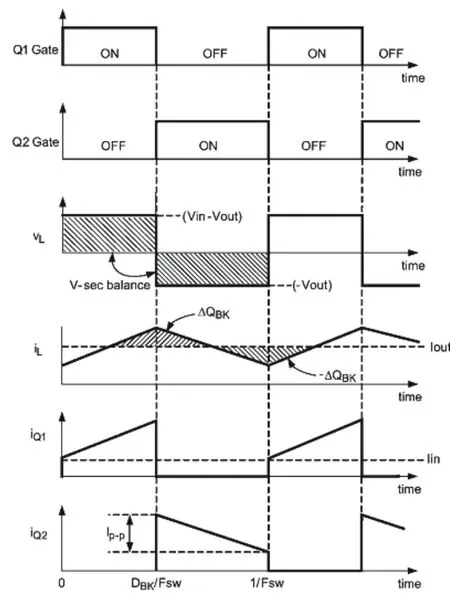
图6 降压模式DC/DC工作曲线
(d)MPPT能源管理器工作于旁路状态
当太阳电池电路严重损坏或者与其他电路严重失配时,能源管理器工作于旁路模式将故障电路隔离。
2.3 MPPT数据采集电路设计
能源管理器的整体设计要求采集每个MPPT的输入电压、输出电压、输入电流、输出电流,以便能源管理器工作时,可以监控其工作状态,并评估不同工况下的工作效率。MPPT数据采集电路实现对上述数据的采集,并传输至上位机。
采集电路与下位机数据传输时采用了光电隔离,解决了MPPT模块串联使用时各物理量悬浮地的问题。数据采集电路由电源供电电路,单片机及复位电路,数据通讯电路,模拟量输入低通滤波电路、调节电路组成,电路原理图如图7所示。
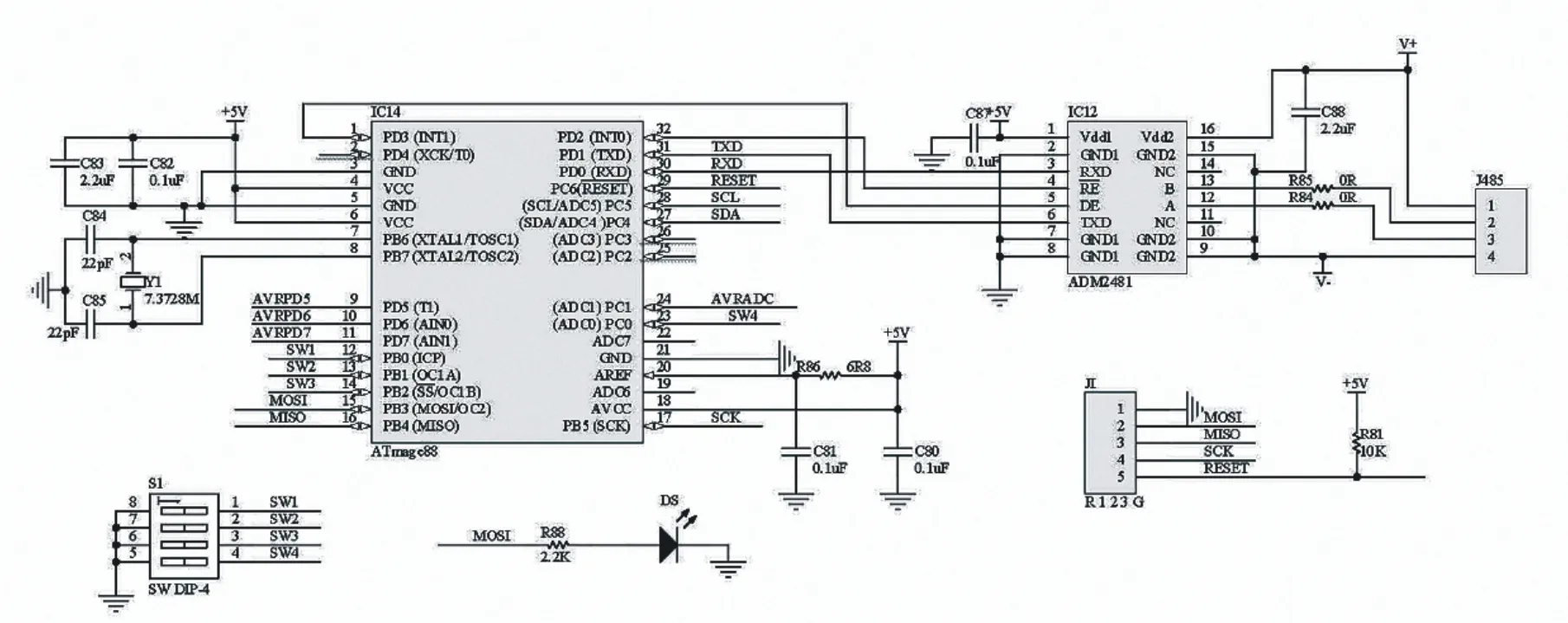
图7 MPPT数据采集电路
2.4 DC-DC电路设计
无人机使用国外直流-直流变换器(DC-DC电源模块),机载设备电源控制部分通过动力母线二次变换获得,完成对12 V飞控系统及数传电源,7 V舵机负载电源和12 V载荷负载设备母线的转换,二次电源原理图如图8所示。
2.5 BDMR电路设计
BDMR电路需实现两路APR、两路蓄电池接入控制及相互隔离,太阳电池及蓄电池联合供电控制,数据采集等功能。两路蓄电池供电为受控制方式,可由下位机控制断开任一回路。
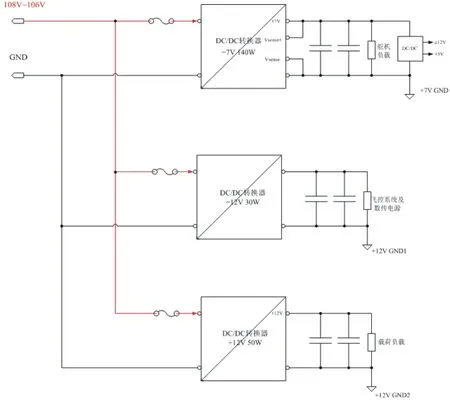
图8 二次电源原理框图
两路APR和两路蓄电池隔离采用二极管隔离的方式实现,为了降低功耗,提高控制效率,两路APR输入和LI蓄电池回路中的二极管采用MOS等效电路实现,LiS电池由于工作电流比较小,回路中的二极管由普通二极管实现。该部分电路如图9所示,电路功能由下图中的MOS管及体内二极管实现,当回路电流低于0.5 A时,MOS截止,电路由MOS体内二极管构成回路;当回路电流大于0.5 A时,MOS导通,电路由MOS构成回路。由此可以对比较不同条件下的二极管功耗。普通二极管与等效二极管功耗对比见表2。
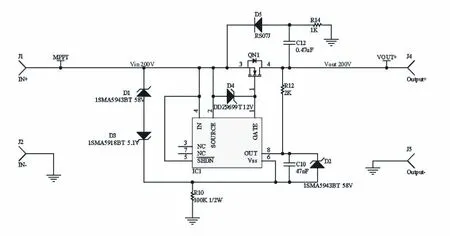
图9 等效二极管电路
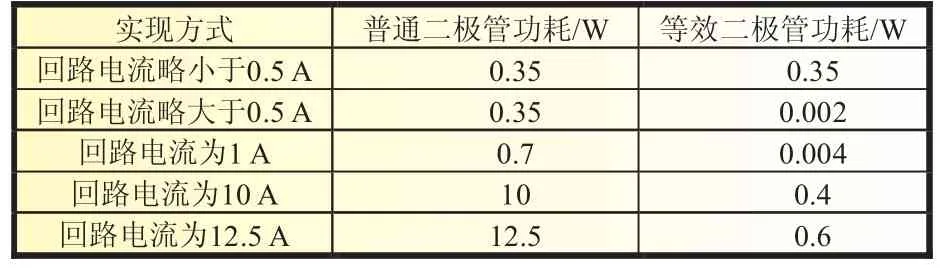
表2 普通二极管与等效二极管功耗对比表
2.6 TMTC电路设计
TMTC负责实时监测能源系统在各种工作状态下电流、电压以及温度等相关数据,并计算相关工作效率,保证这些数据实时上传。通信以ATMEL公司AT89C51CC01单片机为控制核心,内置CAN通信控制芯片,如图10所示。MPPT的八路电流、电压、功率等数据信号经过光耦隔离后,通过多路开关以UART协议进入单片机;母线,锂离子、锂硫电池组,APR1,APR2电压数据通过数字隔离器隔离后以SPI通信协议进入接口;母线,锂离子、锂硫电池组,APR1,APR2电流数据以SPI通信协议进入接口;温度传感器DS18B20数据信号多路并联后进入单片机接口,由单片机通过DS18B20内在地址进行逐个温度采集,采用单线通信方式;上传数据串口RS232采用隔离芯片MAX3250,它内置隔离电平转换;预留的CAN接口以单片机内置CAN通信控制芯片为核心,收发器采用隔离的ISO1050;电源转换芯片DCR021205为TMTC系统芯片供电,隔离电源转换芯片DCR011205预留为CAN总线收发器ISO1050供电。
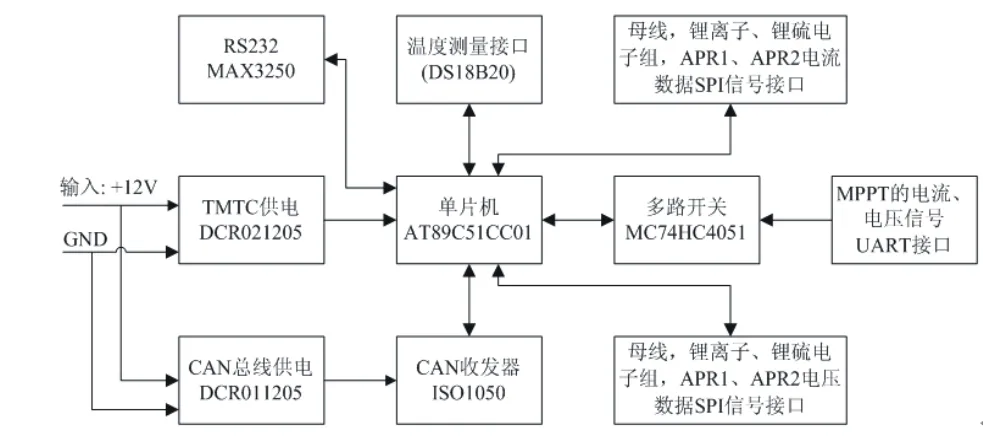
图10 TMTC系统工作框图
3 实验及测试结果
能源管理器的电性能测试由太阳电池模拟器、电子负载、直流电源和工控机组成(图11)。4台太阳方阵模拟器(双通道)分别模拟8路太阳电池输入与八路MPPT电路连接;直流电源1模拟锂电池的输出,直流电源2模拟锂硫电池的输出;两台电子负载分别模拟电机负载和设备负载。一台工控机作为上位机,能源管理器下位机通过RS422总线在测试过程中上传遥测参数至上位机,实时监测能源系统状况。图12为能源管理器整机。
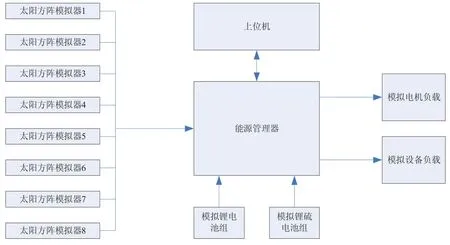
图11 能源管理器测试框图
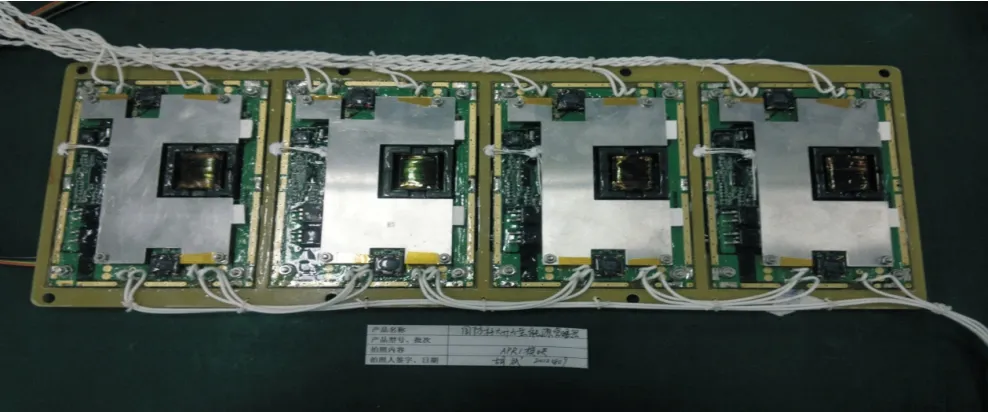
图12 能源管理器整机
系统接线图如图13所示,蓄电池暂不接入系统,设置8路太阳能模拟器的总输出为1 050.72 W,单路工作点电压33 V,总工作点电压132 V,设置负载为恒流负载,测试结果如表3。

图13 能源管理器测试照片

表3 系统1 000 W级效率测试
蓄电池暂不接入系统,设置8路太阳能模拟器总输出为1 279.97 W,单路工作点电压40.2 V,总工作点电压160.8 V,负载为恒流负载,测试结果如表4。
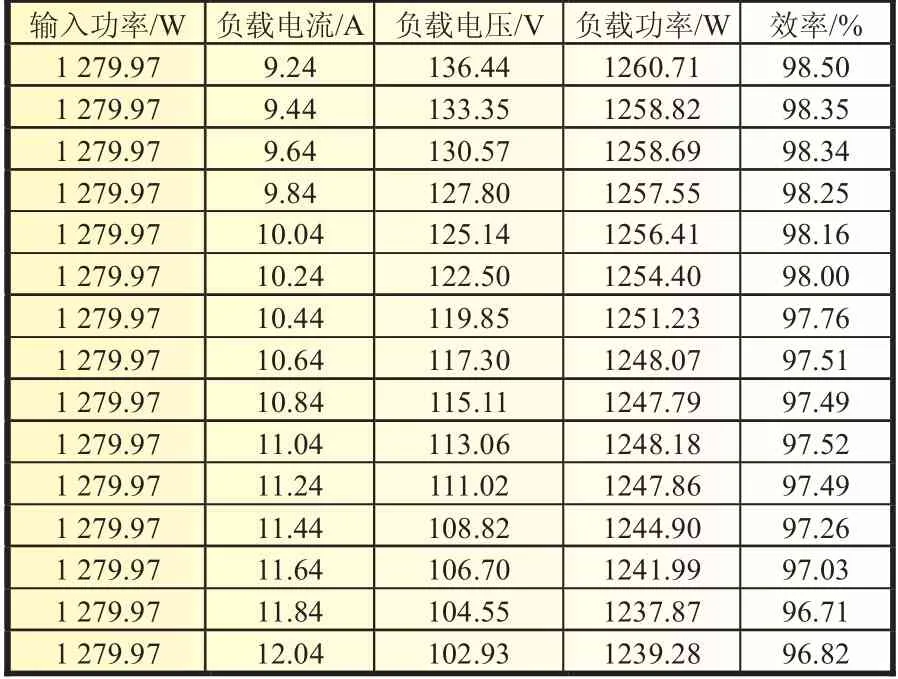
表4 系统1 250 W级效率测试
将蓄电池接入系统,太阳能模拟器分8路接入控制器,总功率设置为720.22 W,单路工作点设置为30.16 V,总工作点电压为120.64 V,蓄电池电压108~115 V,在系统工作过程中突然断开一路太阳能组件使太阳能系统的工作电压低于蓄电池电压,此时观察其余三路控制器是否能通过强制升压功能将太阳阵电压升高使系统正常工作,测试结果如图14所示。
由图14可以发现在1 880 s时突然断开一路太阳电池阵,由于其他7路的开路电压低于蓄电池电压造成太阳能管理系统无法工作,此时剩余7路MPPT控制器通过强制升压电路升压重新与蓄电池建立电路关系,在1 885 s时可观察到由于加入了强制升压功能使剩余三路MPPT控制器还能正常工作,此时能源管理系统效率在98%以上,在2 150 s时将太阳电池组件重新接入电路系统又恢复到最初工作状态,可见该系统具备故障隔离和智能修复功能。
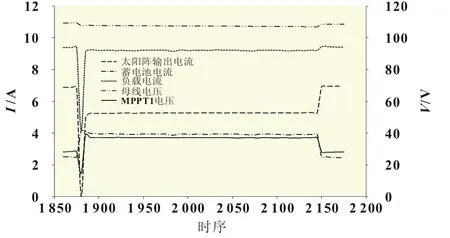
图14 强制升压功能测试
4 结束语
本文对太阳能无人机能源管理器的设计进行了详细的阐述,对能源系统各个工作状态进行了实验验证。该方案成功实现了对电源系统中太阳阵、锂离子电池以及锂硫电池管理功能,系统效率在95%以上。该设备的研制成功,满足了工程需求,而其选用最大功率点跟踪(MPPT)半调节母线拓扑技术对临近空间电源系统具有很好的适用性。
[1]ROMEO G,FRULLA G,CESTINO E,et al.Heliplat:design,aerodynamic,structural analysis of long-endurance solar-powered stratospheric platform[J].Journal of Aircraft,2004,41(6):1505-1520.
[2]高广林,李占科,宋笔锋,等.太阳能无人机关键技术分析[J].飞行力学,2010,28(1):1-4.
[3]曹秋生,张会军.高空长航时无人机的发展特点及技术难点探讨[J].中国电子科学研究院学报,2008,3(1):8-13.
[4]马帅旗.光伏发电系统最大功率跟踪研究[J].电源技术,2013, 37(9):1595-1598.
《动力电池材料》
本书从基本的新能源汽车讲起,全面介绍了新能源汽车与绿色环境、新能源汽车的心脏--动力电池、动力电池的类型、动力锂离子电池的材料、动力金属氢化物-镍电池材料、超级电池和铅碳电池材料、燃料电池材料的研究成果和未来发展趋势,集科学性、知识性和系统性于一体,可读性强,适合企业、科研、学校、商贸、咨询、媒体的相关人员参考学习。
Research and design of power management system of solar unmanned aerial vehicle
The power management system(PMS)of the solar unmanned aerial vehicle(UAV)was introduced.PMS had been tested with different working status. Maximum Power Point Tracking (MPPT) and the topology of semi-tuned bus were chosen by the design, and the design had the ability of managing the solar cell array, Lithium-ion battery and Lithium sulfur battery.The designed PMS with great adaptability and performance was useful in the application of UAV.
solar unmanned aerial vehicle;power management system;maximum power point tracking;topology of semi-tuned bus
TM 911
A
1002-087 X(2015)10-2161-05

2015-03-14
胡斌(1985—),男,安徽省人,工程师,主要研究方向为测控技术与仪器。