双跟踪模式的智能太阳能追踪系统设计
2015-08-01闫孝姮王改华
闫孝姮,吴 琨,王改华
(1.辽宁工程技术大学电气与控制工程学院,辽宁葫芦岛125105;2.辽宁工程技术大学安全科学与工程学院,辽宁葫芦岛125105)
双跟踪模式的智能太阳能追踪系统设计
闫孝姮1,2,吴 琨1,王改华1
(1.辽宁工程技术大学电气与控制工程学院,辽宁葫芦岛125105;2.辽宁工程技术大学安全科学与工程学院,辽宁葫芦岛125105)
针对提高太阳电池板光电转换率问题,以MSP430F149单片机为控制核心设计了一种太阳能智能追踪系统。采用光电式跟踪和视日运动轨迹跟踪相结合的方式,通过MSP430F149的ADC12检测采集值判断天气情况,晴天采用光电式跟踪,阴天采用视日运动轨迹跟踪。控制系统通过控制双轴步进电机令太阳电池板转动使其始终垂直于太阳光,从而使太能光的利用率大幅度增加。运行表明,系统运行稳定,节能减排,适用于各种小型太阳电池板充电系统。
太阳能;自动跟踪;双模式
利用太阳能充电式路灯、显示屏等已得到广泛应用,目前广泛采用的是靠面积较大的太阳电池板来吸收能量。但该类太阳电池板在安装时普遍采用固定位置,而太阳能具有分散性和季节变换日照方向不固定等缺点,是造成太阳能利用率不高的主要原因。针对这一问题,本文设计了一种双模式的智能追踪系统,大幅度增加了太阳能的利用效率,适用于各种小型太阳电池板充电系统。
1 原理及算法设计
1.1 系统工作原理
通常的太阳能追踪方式有两种:一是光电式追踪模式,即通过太阳光的即时检测来进行追踪,该追踪方式会受天气的影响;另一种则是视日运动轨迹追踪模式,即通过预先设定函数来计算太阳的方位后,进行固定转动进行追踪,它不受天气、其他光源的干扰,但是由于计算太阳角度方位时取的数值不是完全精确,会产生误差,以及跟踪转置的机械机构的精密度也会产生精度影响。鉴于这两种追踪方式的优缺点,本文采用两种方式相结合的方法对太阳能进行追踪,产生更高的效率。系统原理框图如图1所示。
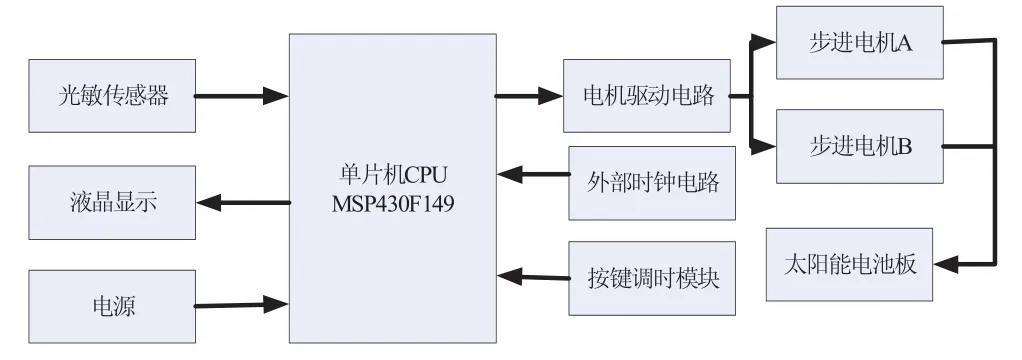
图1 系统原理框图
首先由光敏传感器检测是白天还是黑夜,是晴天还是阴天;用软件给单片机设定一个阈值,当超过阈值则为白天,否则是黑夜。若是黑夜则采用蓄电池供电,若是白天,则检测是晴天还是阴天,同样给单片机设定一个阈值,当光敏传感器检测后经AD转换后的数值超过一定值则为晴天,否则为黑夜。
晴天时采用光电检测追踪模式,随时检测太阳光入射角的改变,当光敏传感器测得的电压值传给单片机,经AD转换后,单片机判断是否应该改变电池板的角度及方向,然后发出指令,驱动步进电机的转动方向和步数转动到合适的方位角。
阴雨天时采用视日运动追踪模式,由软件根据读取外部时钟电路的时间,判断太阳现在的位置,并判断和前一次的方位上角度相差多少度,以此确定好当前应该控制步进电机的转动方向和角度。
本系统中利用光敏电阻在光照时阻值发生变化的原理,将4只完全相同的光敏电阻分别放置于太阳光接收器的东南西北方向,负责侦测这4个方向的光源强度。如果太阳光垂直照射太阳电池板,东西(南北)2只光敏电阻接收到的光照强度相同。其阻值完全相等,此时电动机不转动。当太阳光方向与电池板的法线有夹角时,接收光强多的光敏电阻阻值减小,信号采集电路采集到光敏电阻的信号差值,控制电路将其差值转换成控制信号,驱动电动机转动,直至2只光敏电阻上的光照强度相同。其放置位置如图2所示。其中E用于检测环境亮度,判断是白天还是黑夜,阴天还是晴天。
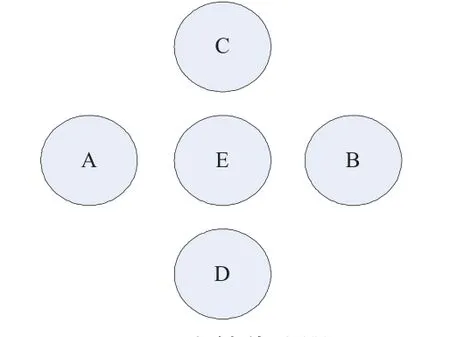
图2 光敏传感器
1.2 算法设计
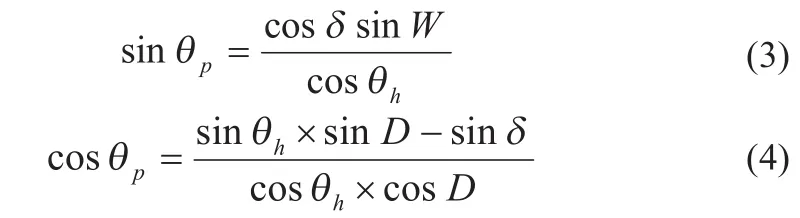
要计算视日运动轨迹,首先需要确立太阳一天中的运动轨迹,太阳的位置不是一直处于一个平面上的,而是运动在一个立体层面上,确定太阳的位置需要得到两个变量的值:太阳高度角和方位角。
太阳高度角是指某地太阳光线与该地作垂直于地心的地表切线的夹角,高度角随着地方时和太阳的赤纬的变化而变化,日升日落,同一地点一天内太阳高度角是不断变化的,日出日落时角度都为0°,正午时太阳高度最大,角度为90°。
太阳方位角是指太阳光线在地面上的投影与当地子午线的夹角,可近似看作是竖立在地面上的直线与阳光下的阴影在正南方的夹角,方位角以正南方为零,由南向东向北为负,由南向西向北为正。
其中日角:
式中:Rn为一年的日期序列,可以把1月1日取为1,12月31日取为365;弧度δ=0.006 89-0.399 51 cosθ+0.072 08sinθ-0.0068cos2θ+0.0009sin2θ-0.00269cos3θ+0.00151sin3θ。

式中:15为每小时相当于15°的角。设太阳的高度角为θ,方位角为θ,则sinθ=sinsinδ+coscosδ cos。
单片机可以根据太阳的高度角和方位角,来设置步进电机的转动步数。
2 硬件设计
2.1 单片机CPU
在该系统中采用的是 MSP430F149单片机,在MSP430F149中有1个12位精度的A/D转换模块ADC12,有48个I/O口引脚,主要由5大功能模块组成,且都可独立配置,它们分别为:带有采样/保持功能的ADC内核,可控制的转换存储,可控制的参考电平发生器,可控制和选择的时钟源,可控采样及转换时序电路。带有7个捕获/比较寄存器的16位 Timer_B和带有 3个捕获 /比较寄存器的 16位Timer_A,在比较模式下可以产生PWM信号。
2.2 光敏传感器的设计
光敏传感器的设计电路如图3所示,线路端口引出的电压经MSP430F149内部AD转换后转换为数字,A、B、C、D、E为光敏电阻,R1、R2、R3、R4、R5为1 kΩ的电阻,光敏电阻受光照射时会变小,当P2.5处测得的值大于某一阈值,则为晴天,否则为阴天。若P2.2处引入的电压大于P2.1,则为东侧的光照强度大,否则为西侧大,同理,若P2.3侧的电压值大于P2. 4则为北侧的光照强度大,否则为南侧的大。
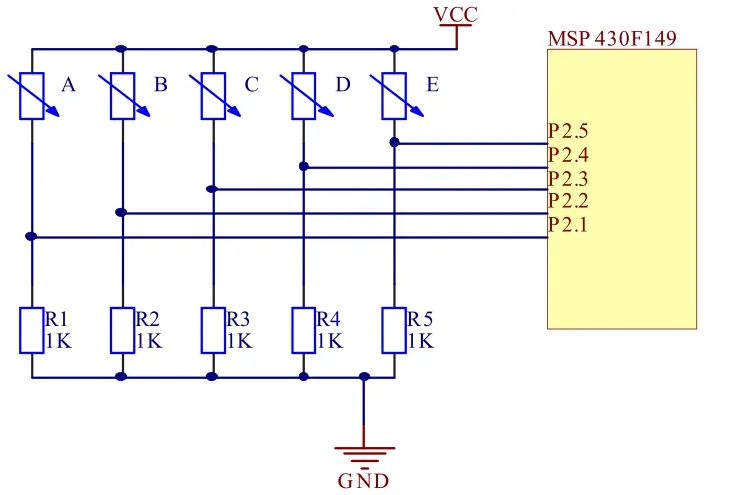
图3 光敏传感器电路
2.3 时钟电路的设计
在该系统中采用的是外部时钟芯片DS1302,该芯片有时序控制,而且抗干扰,体积小,连线少;用于记当地的时间,通过读取时间来计算当地的太阳高度角和方位角。其电路图如图4所示。
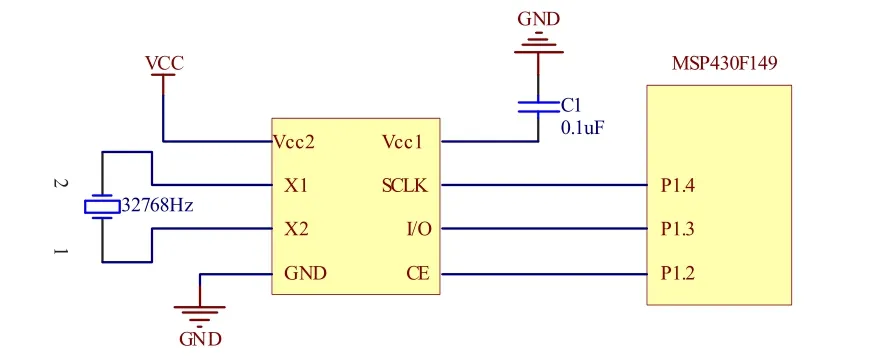
图4 时钟电路
2.4 显示模块电路设计
液晶显示模块为128×64点阵的汉字图形液晶显示模块,可显示汉字和图形,内置8 192个中文汉字、128个字符及64×256点阵显示RAM,该系统中采用的是并行的连接方法。用于显示当地的时间,用于单片机控制步进电机的转动。其电路图如图5显示模块电路图。
2.5 电机驱动电路
在该系统中采用L298N芯片并且整流后来驱动两个步进电机,单片机通过判断太阳所在位置的高度角和方位角来控制步进电机的转动方向以及步数。MSP430F149可以通过软件编程产生两路PWM波,其电路图如图6所示,其中part1、part2、part3、part4分别接P5.4、P5.3、P5.2、P5.1。
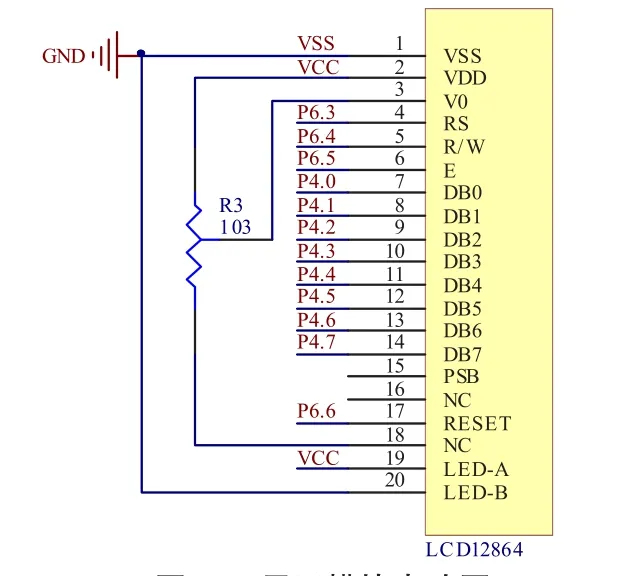
图5 显示模块电路图
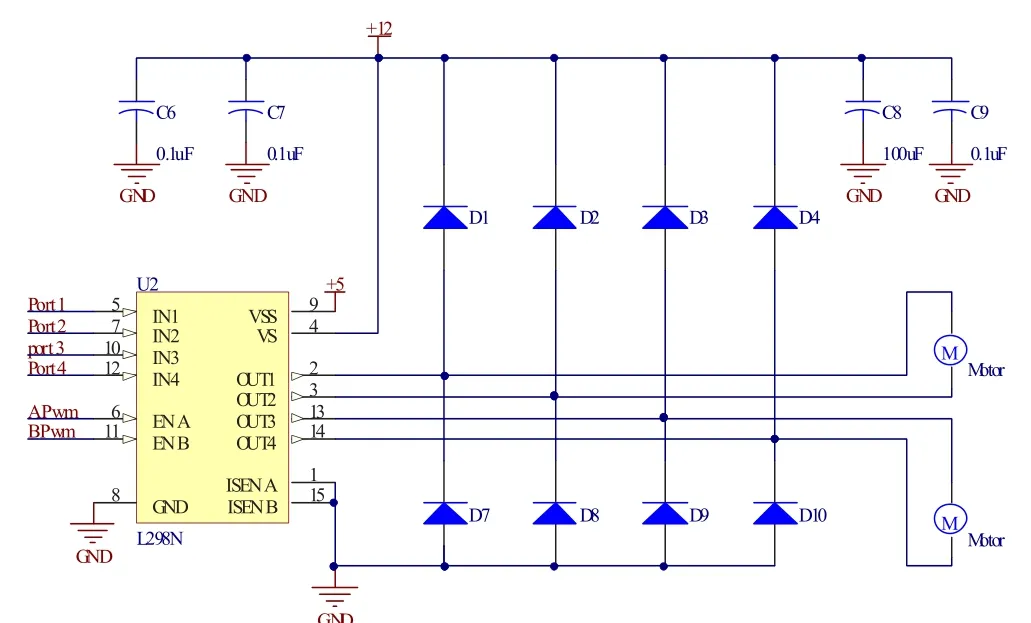
图6 电机驱动电路
3 软件设计
光电式模块探测太阳位置,通过MSP430F149的ADC引脚送入单片机,经过A/D转换,通过信号差值判断太阳能利用装置是否正对太阳,直到调整太阳能利用装置对准太阳。然后再返回主程序,光电式模块程序流程图如图7所示。
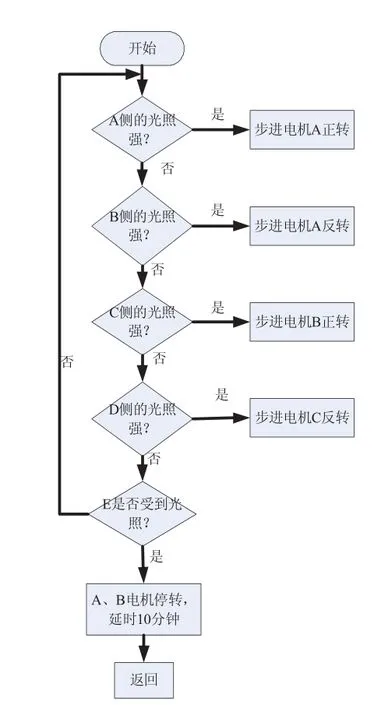
图7 光电检测追踪模式程序流程图
当阴天时,采用视日运动方式进行追踪,MSP430F149从DS1302读取时间,根据单片机设定的函数计算太阳的方位角和高度角,然后计算出步进电机应该转动的方向和步数,再通过LM298驱动步进电机进行转动,以追踪太阳的位置。当偏差值小于设定值时返回主程序,否则报警(图8)。
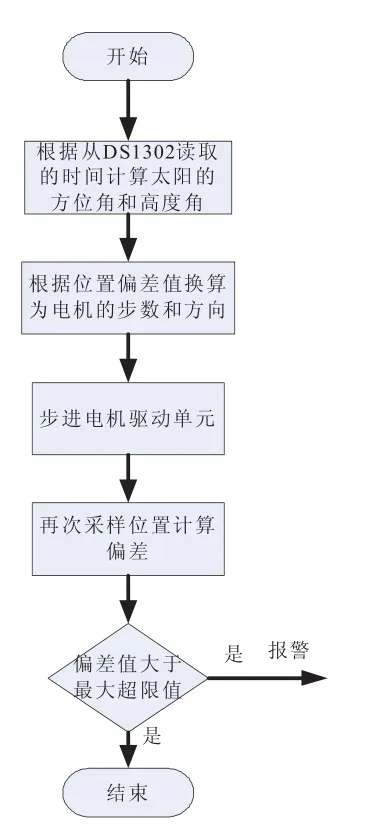
图8 视日运动追踪方式程序流程图
4 结论
通过在阴天和晴天的实际测试,系统在用户设定的工作时间内能够正常稳定地工作。晴天时,太阳电池板能够通过四周的光敏电阻时时调整,使太阳电池板始终垂直于太阳光。阴天时,太阳电池板能够每隔一定的时间,旋转一定的角度,通过计算的方法追踪太阳。本设计具有硬件电路简单、成本低和效率高等优点,具有高实用性以及广阔的前景[1-6]。
[1]张建坡,张红艳,王涛,等.光伏系统中最大功率跟踪算法仿真研究[J].计算机仿真,2010,27(1):266-270.
[2]李丽丽,施伟.太阳能路灯智能控制系统设计[J].电源技术,2012, 36(5):686-689.
[3]周昶,马磊,吴春泽,等.使用超级电容的太阳能路灯系统的仿真研究[J].照明工程学报,2010(6):76-81.
[4]王翥,孙嘉宁.基于双CPU的路灯集中控制器设计[J].仪表技术与传感器,2011(1):71-73.
[5]吕运朋,李宏超,张为民,等.基于STC单片机的智能LED路灯控制器设计[J].电源技术,2010,34(5):496-498,508.
[6]刘春.基于太阳能的嵌入式路灯控制系统的研究与应用[D].南京:南京航空航天大学,2010.
《芯片及系统的电源完整性建模与设计》
本书是有关电源完整性设计和建模方面的一部丰富而又生动的指南。书中通过真实的案例分析和可下载的软件实例,描述了当今高效电源分配和噪声最小化的设计与建模的前沿技术。作者介绍了电源配送网络组成部件、分析技术、测量技术及建模需求;详尽解释了电源/地平面建模,包括平面特性、集总模型、基于分布电路的方案等;介绍了几种先进的时域仿真技术(例如宏模型),并讨论了它们的优缺点;此外还展示了建模技术在多种高级案例中的应用,包括高速服务器、高速差分信令、芯片封装分析、材料特性、嵌入去耦电容器和电磁带隙结构等。
Design of intelligent solar tracking system by double track model
Aiming at the problem of photovoltaic efficiency,an intelligent solar tracking system was designed with the MSP430F149 MCU as the core.Combination of the photoelectric tracking and trajectory tracking was adopted by the system by sun though the data of ADC12 of MSP430F149 to determine the condition of weather which could photoelectric tracking on sunny and trajectory tracking by cloudy.The solar panels perpendicular was made by the control system to the sunlight all the time though double-axis stepper motor so that utilization rate increased significantly.The running of system show that the system runs stably,energy conservation and emissions reduction. It could be applied to all kinds of small solar panels charge system.
solar;automatic tracking;dual mode
TM 914
A
1002-087 X(2015)10-2166-03

2015-03-18
辽宁省科技攻关项目(2011229011);辽宁省研究生培养机制改革研究项目(Lnxwb12027)
闫孝姮(1984—),女,辽宁省人,副教授,主要研究方向为智能检测与控制、煤矿安全监测监控系统。
吴琨