基于多峰峰值功率跟踪的月球车一次电源
2015-08-01赵建辉
薛 蕾, 赵建辉, 李 帆, 郝 博
(北京航空航天大学仪器科学与光电工程学院,北京100191)
基于多峰峰值功率跟踪的月球车一次电源
薛 蕾, 赵建辉, 李 帆, 郝 博
(北京航空航天大学仪器科学与光电工程学院,北京100191)
由于月球上月尘、遮挡等造成太阳电池阵输出功率呈现多峰特性,此时传统的峰值功率跟踪(maximum power point tracking,MPPT)失效。为提高功率利用率,需要跟踪全局最大功率。且月球车处于极度低温环境,需要放射性同位素温差发电器(radioisotope thermoelectric generator,RTG)为月球车提供电能和热能。综上,月球车一次电源系统由太阳电池阵-蓄电池组-放射性同位素温差发电器联合供电。仿真结果表明,太阳电池阵按照需要输出峰值功率,蓄电池组通过恒流恒压(CC-CV)充电,母线电压始终维持在42 V左右,各项功率、电流、电压输出都符合月球车供电要求。
多峰峰值功率跟踪;联合供电;智能化控制;一次电源;月球车
太阳电池阵-蓄电池组组合是目前应用最为广泛的卫星电源系统,但月球日照面和阴影面温度相差极大。日照面的月球表面温度可达,阴影面极端低温可达,月夜长达14个地球日,这段时间里太阳电池不能为蓄电池充电,放射性同位素温差发电器(RTG)是最佳的供电供热部件[1]。因此,月球车一次电源工作方式为太阳电池阵-蓄电池组-放射性同位素温差发电器联合供电,进而维持电源系统持续、正常地供电,且能够按照要求进行不同工作模式的顺利切换,实现月昼时期由太阳电池阵-蓄电池组向负载联合供电,月夜时期由放射性同位素温差发电器提供负载功率。
要提高电源系统性能,提高供电效率,除选用高性能的发电装置外,应该采用峰值功率跟踪MPPT(Maximum Peck Power tracking)控制策略,严格按照负载需求控制太阳电池阵的输出功率,不产生过剩功率,最大限度地利用太阳电池阵输出功率。但由于月球上月尘、遮挡的影响,使得太阳电池阵输出功率成多峰特性,因此需要研究适用于外界光照变化的多峰MPPT。
本文建立月球车一次电源仿真模型,采取太阳电池阵-蓄电池组-放射性同位素温差发电器联合供电,设定相关参数,仿真并进行相关分析。
1 月球车分系统
1.1 太阳电池阵遮挡模型
局部阴影条件下,光伏阵列串联支路中被遮蔽的电池组件成为负载而发热,称之为“热斑”效应。此时,被遮蔽部分的光伏电池两端为反向电压,达到一定程度时,发生反向雪崩击穿从而损坏电池[2-3]。
光伏电池模块是由光伏电池元串并联而成的,光伏电池阵太阳电池阵串并联数分别为和,则此光伏模块的数学模型[4]为:
假设光伏阵列由三组光伏电池模块串联组成,电池表面温度不变。在三种不同阴影条件下:A.光照均为1 000 W/m2;B.光照分别为1 000、1 000和800 W/m2;C.光照分别为1 000、800和600 W/m2;D.光照分别为800、600和400 W/m2。进行仿真,得到的光伏阵列的P-V特性和I-V特性仿真曲线如图1所示。

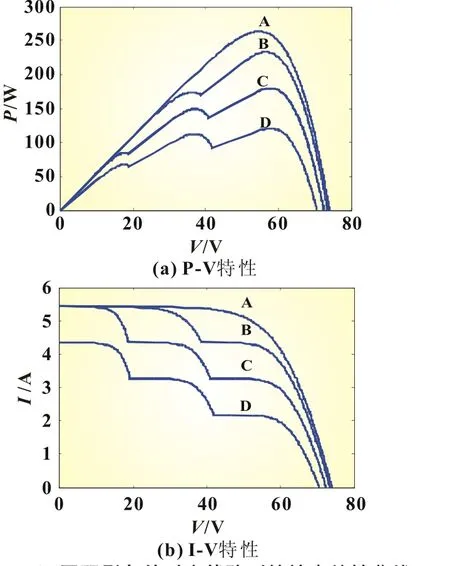
图1 不同阴影条件时光伏阵列的输出特性曲线
由图1可以看出由于光伏模块并联旁路二极管,阴影条件下P-V和I-V特性曲线呈现多峰状,即输出功率存在局部极大值和全局最大值,且其多峰个数随光照条件复杂程度增加而增加。
1.2 锂离子蓄电池模型
锂离子蓄电池一般采用恒流-恒压(CC-CV)充电制度。本文中锂电池采取小电流-大电流-恒压充电制度:首先用低倍率(0.1)充电,当单体电池电压达到3 V时转为高倍率(0.4)充电,直到单体电池电压达到4.2V时改为恒压充电,此时充电电流成指数形式衰减,当充电电流小于0.02 A时充电终止。
按照设定电流对充电电流进行控制,采用比例积分控制占空比信号调节开关管开度,从而对充电电流进行控制。具体过程如下:
开关管占空比增量:

控制开关管开度的占空比信号为:

总充电电流为:

锂离子蓄电池充电电压、电流曲线如图2所示。
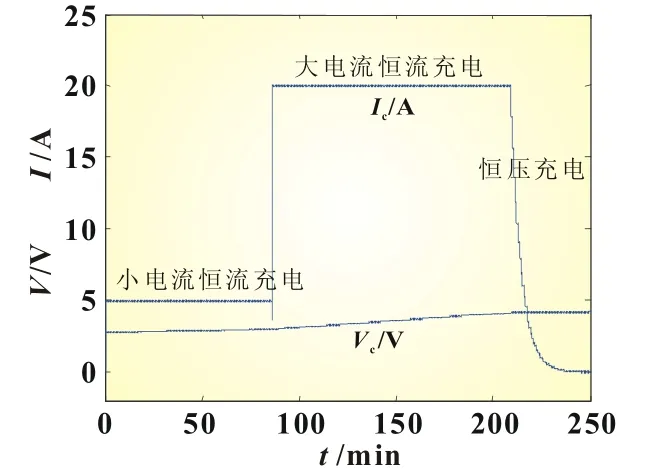
图2 锂离子蓄电池充电过程
图2中,上下曲线分别为充电电流、充电电压,可见恒流充电阶段充电电流大小保持不变 (小电流阶段保持为5 A,大电流阶段转为20 A),蓄电池端电压不断上升,恒压充电阶段,端电压保持不变,充电电流不断减小直到小于0.02 A时充电结束。
2 多峰MPPT控制器设计
2.1 MPPT控制器设计
占空比扰动MPPT算法采用脉宽调制器(PWM)作为核心控制部件,是由微扰观察法改进而来的,能快速地跟踪太阳电池阵的最大功率点,为保证动、稳态性能,采用自适应占空比扰动法。
运用模糊PID控制调节占空比,跟踪太阳电池阵的最大功率点。功率误差信号为[5-6]:



2.2 多峰MPPT控制器设计
模糊控制的最大优点是不依赖于被控对象的精确模型,鲁棒性较强,因此被广泛应用于各种控制系统。本文设计的多峰MPPT控制器基于模糊免疫自适应PID控制,其系统结构如图3所示。
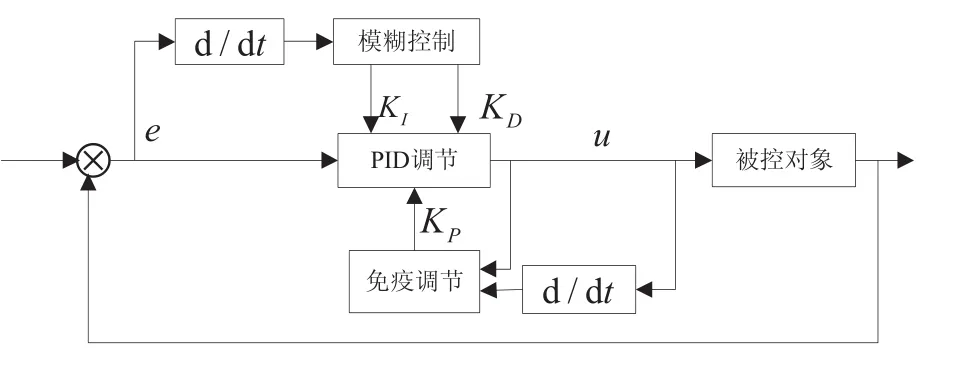
图3 模糊免疫PID控制器结构图
当外界光照发生变化时,首先通过模糊免疫PID控制方法跟踪到局部极大值,对于该时刻的PWM值,加±30%扰动,判断此时输出的功率是否大于局部极大值,如果输出功率小于局部极大值,则输出局部极大功率为全局最大输出功率;如果扰动范围内一点的输出功率值大于局部极大功率,则该功率成为新的“最大功率点”,继续对PWM施加扰动,直到找到全局最大功率。
2.3 多峰MPPT控制器仿真结果
假设3 s时发生遮挡,光照强度从1 000 W/m2突然减小为600 W/m2,光伏电池表面温度=298 K,负载阻值=1.568 Ω。设置仿真固定步长为0.01 s,运行时间为6 s,仿真结果如图4所示:(a)改进的固定步长扰动法,步长=2%;(b)基于模糊PID控制的自适应扰动法;(c)基于模糊免疫PID控制的多峰MPPT。
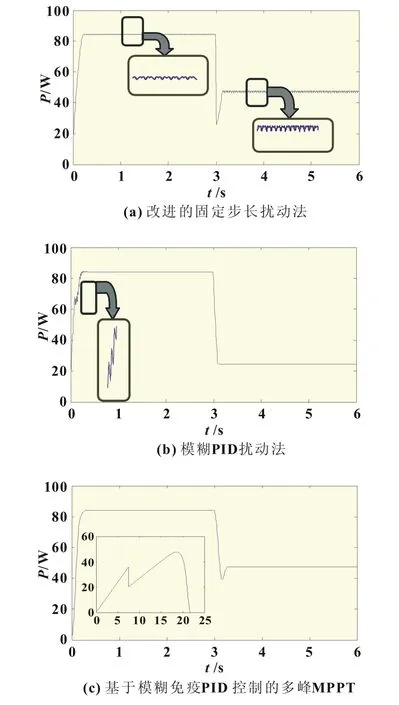
图4 MPPT控制器仿真输出波形
根据图4,波形(a)跟踪速度较快,动态响应性能较好,但波动较大;波形(b)对外界环境因素变化的反应迅速,但有时震荡较大,且陷入局部极大功率,不能有效跟踪到全局最大功率,功率损失高达38.3%;波形(c)不仅跟踪速度快,几乎无稳态误差,在3 s发生遮挡时,振荡相对较小,能够快速越过局部极大功率,跟踪到全局最大功率,因而具有良好的动、稳态性能且鲁棒性高。
3 月球车一次电源设计
3.1 月球车一次电源总体结构
月球车一次电源分系统月昼期间负责提供电能,月夜期间负责提供安全度过月夜所需的电能和热能。电源分系统在发射段、地月转移段、环月和动力下降段,直至与着陆器分离前不工作,由着陆器提供月球车负载所需的电能。两器分离后,月球车电源分系统开始为巡视器负载提供供电功率。
月球车一次电源结构框图如图5所示,整个控制过程为月昼时期由太阳电池阵-蓄电池组联合供电,月夜时期由RTG供电。采用锂离子蓄电池,充电方式为恒流-恒压(CC-CV)。
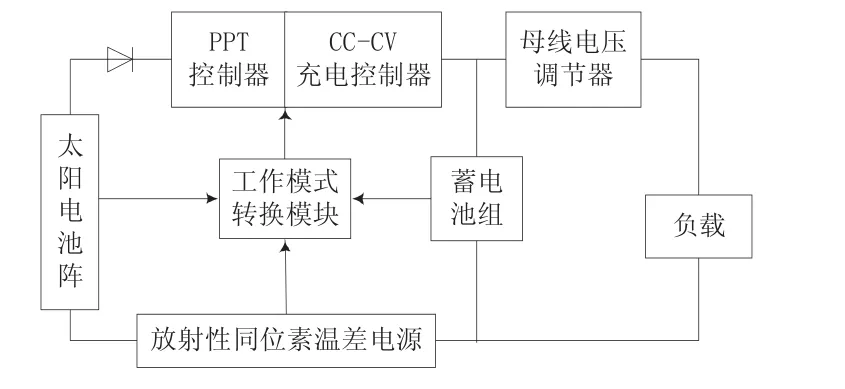
图5 月球车一次电源结构框图
3.2 月球车一次电源工作模式转换模块
电源分系统承担能量的产生、储存、输送以及控制管理的任务,直至寿命终止。太阳电池阵工作点选择性位于峰值功率点[7-8]。工作模式包括[9]:
模式1,峰值功率跟踪-放电模式(MPPTD):月球车出现峰值负载或光照条件不好,太阳电池阵输出最大功率仍不能满足负载需要,由太阳电池阵和蓄电池组联合供电。
模式2,峰值功率跟踪-充电模式(MPPTC):太阳电池阵输出最大功率,功率满足负载要求并剩余时,锂离子蓄电池组以小于恒流充电电流充电,充电电流随太阳电池输出电流大小变化。
模式3,充电调节模式(BCR):太阳电池阵输出功率完全满足负载和充电功率需要,蓄电池以设定的电流充电,太阳电池阵的工作点偏离最大功率点。锂电池采取恒流-恒压(CC-CV)充电。
模式4,放射性同位素温差发电器供电(RTG):月夜期间,光照强度为0,RTG利用塞贝克效应将放射性同位素的衰变热直接转换成电能,为月球车提供月夜期生存所需电功率和热功率。
工作模式状态转移图及条件如图6所示。
4 月球车一次电源仿真结果及分析
假设月球车所处环境光照强度如图7所示,0~5 000 s为光照期(月昼时期),5 000~7 000 s为阴影期(月夜时期),7 000~8 000 s返回光照期,但光照强度变弱。一次电源仿真结果如图8~11所示。
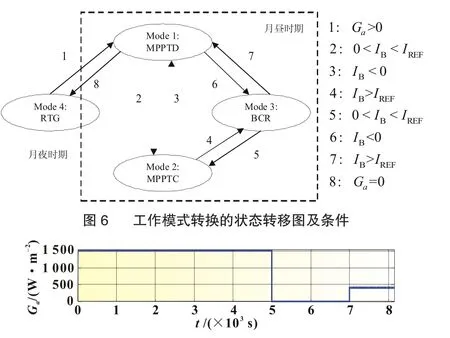
图7 光照强度

图9 太阳电池阵输出功率、负载功率、蓄电池充放电功率
图8所示为月球车一次电源工作模式转换信号的变化,1表示开关选通,0表示开关关断。图9所示为太阳电池阵输出功率、负载功率以及蓄电池充放电功率。
由图分析可知,0~5 000 s为月昼时期,其中0~2 500 s时,负载功率较小,此时太阳电池阵输出功率能满足负载供电与蓄电池组正常充电,因此开关BCR选通,峰值功率跟踪器调节太阳电池阵工作点,使其输出功率小于峰值功率。2 500 s后蓄电池端电压升高,蓄电池充电功率随之增大。2 500~4 500 s内,太阳电池阵输出功率不足以满足负载供电与蓄电池组正常充电,此时工作模式为MPPTC,即太阳电池阵工作于峰值功率点,根据“负载优先”原则,其输出功率满足负载供电,多余能量用于蓄电池组充电,图9显示此时蓄电池充电电流远小于参考设定值20 A。4 500~5 000 s,负载功率增加,此时太阳电池阵输出功率不能满足负载供电,因此停止对蓄电池组充电,由蓄电池组与太阳电池阵联合向负载供电,工作模式为MPPTD。5 000~7 000 s,月球车进入月夜时期,太阳电池阵输出功率为0,此时由同位素温差发电器单独向负载供电,工作模式为RTG。7 000 s以后,月球车再一次进入月昼时期,工作模式转换原理同上。
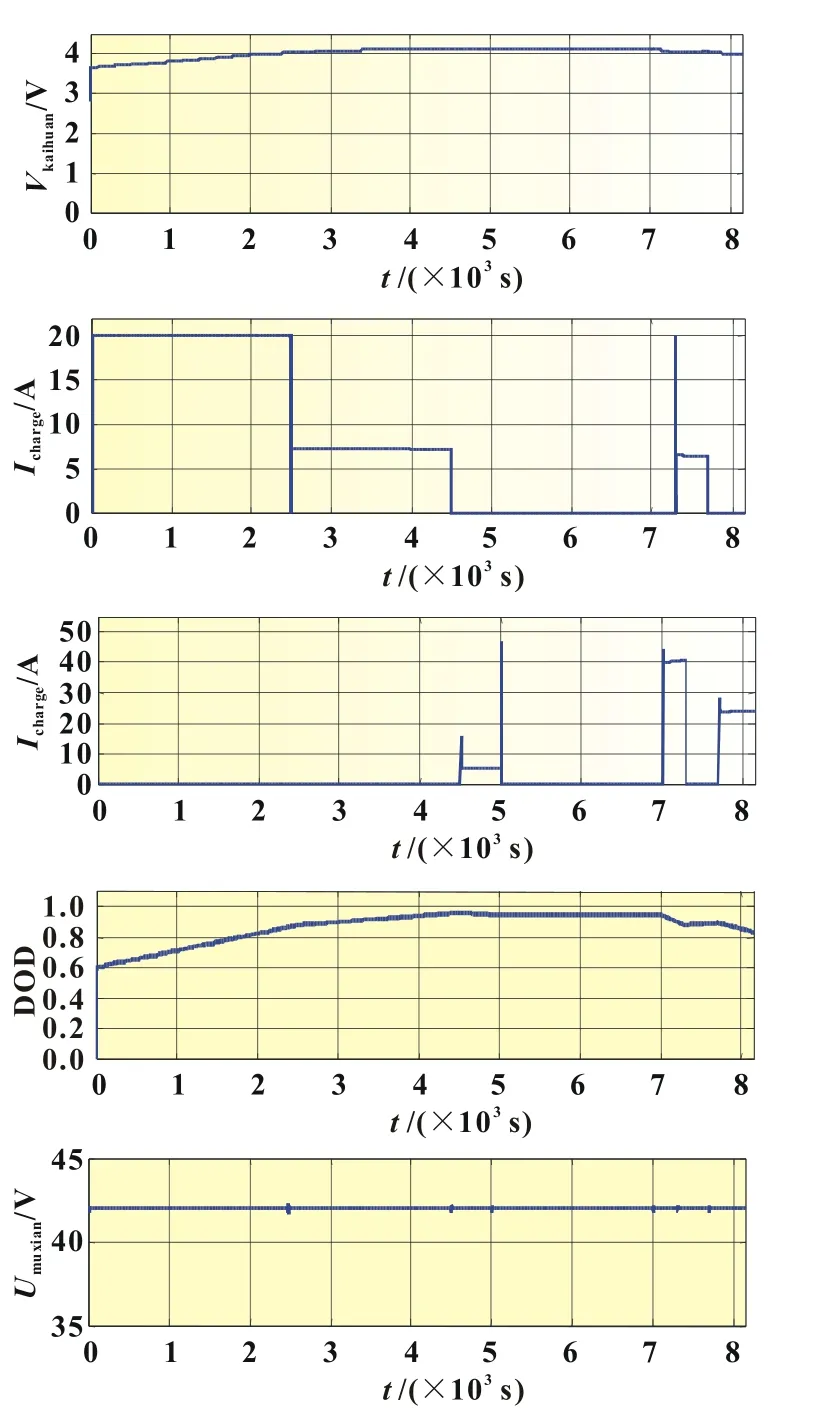
图10 单体蓄电池端电压、充电电流、放电电流、放电深度DOD、母线电压
图10所示为单体锂离子蓄电池端电压、充电电流、放电电流、放电深度DOD、母线电压的变化。可以看出,蓄电池充电电流小于20 A,DOD恒小于1。观察母线电压的变化,可知经过母线电压调节器的调整保持在(42±0.2)V,能够满足月球车负载需求,且一次电源分系统可以保持供电稳定性。
5 结论
太阳电池阵在遮挡情况下,输出功率呈现多峰特性,即具有多个局部极大值点。仿真结果表明,基于模糊免疫PID自适应的多峰峰值功率跟踪算法可以跟踪到全局最大功率值。
月球车一次电源模型,包括MPPT控制器、工作模式转换模块等,各模块间有效配合使得月球车一次电源系统向负载稳定供电。其中,多峰MPPT控制器,使太阳电池阵在遮挡情况下依然能够根据负载需要输出最大功率;工作模式转换模块,使一次电源系统在整个轨道周期满足对负载的供电要求。
[1]张建中,任保国,王泽深,等.放射性同位素温差发电器在深空探测中的应用[J].宇航学报,2008,29(2):644-647.
[2]PATEL H,AGARWAL V.Matlab-based modeling to study the effects of partial shading on PV array characteristics[J].IEEE Transactions on Energy Conversion,2008,23(1):302-310.
[3]周德佳,赵争鸣,吴理博,等.基于仿真模型的太阳能光伏电池阵列特性的分析[J].清华大学学报:自然科学版,2007,47(7): 1109-1112.
[4]薛阳,张佳栋.部分阴影条件下的光伏阵列仿真建模与特性分析[J].华东电力,2011,39(6):0949-0952.
[5]王鹏鹏,李帆,赵建辉.基于Saber-Simulink的PPT卫星电源控制器联合仿真[J].宇航学报,2010,31(12):2818-2823.
[6]刘金琨.先进PID控制MATLAB仿真[M].北京:电子工业出版社,2006:67-82.
[7]CHAO B H,LEE J R,LEE F C Y.Large-signal stability analysis of spacecraft power processing systems[J].IEEE Transactions on Power Electronics,1990,V5(1):110-116.
[8]HUYNH P H,CHO B H.Design and analysis of a regulated peakpower tracking system[J].IEEE Transactions on Aerospace and Electrinic Systems,1999,35(1):84-92.
[9]邹湘文.小卫星电源系统的控制策略及仿真研究[D].长沙:国防科学技术大学,2006.
Design of primary electrical power subsystem of lunar rover based on global MPPT
The multi-peak characteristics of output power of solar array were cause of lunar dust and shading on moon.To improve power utilization,it was necessary to track the global maximum power point.Besides,the lunar rover worked in the extremely low temperature environment,and the Radioisotope Thermoelectric Generator(RTG) provided electricity and heat for the lunar rover.In summary,the lunar rover power system consisted of solar arrays, battery pack and RTG,which supplied power together.The simulation results show that the solar array can output power in accordance with need,the battery pack charges through constant current-constant voltage(CC-CV)and bus voltage are always maintained at about 42 V.The power,current and voltage were in line with power supply requirements of lunar rover.
global maximum power point tracking(MPPT);unite power supply;intelligent control;primary electrical power;lunar rover
TM 911
A
1002-087 X(2015)10-2184-05

2015-03-08
薛蕾(1987—),女,河北省人,硕士生,主要研究方向为月球车一次电源。