实现保持架运动轨迹动态可视化的方法
2015-08-01赵振旗李济顺隋新马伟薛玉君
赵振旗,李济顺,隋新,2,马伟,2,薛玉君,2
(1.河南科技大学 机电工程学院,河南 洛阳 471003;2.河南省机械设计及传动系统重点实验室,河南 洛阳 471003;3.矿山重型装备国家重点实验室,河南 洛阳 471003)
随着主机对轴承寿命及可靠性要求的日益提高,对轴承保持架运动轨迹的研究愈加重视。文献[1-3]对保持架质心的不稳定性、滚动体和保持架之间的相互碰撞、保持架的自由振动等进行了深入探讨,研究结果对于改善轴承结构参数、分析轴承动态性能、提高使用寿命等具有重要意义。通过研究已经得到了保持架轨迹的稳定性特点,并通过不同工况下的影响因素得到了保持架质心轨迹图[1],也有通过特殊的测量方法得到保持架的质心振动特点[4]。但对保持架质心轨迹的研究仍是二维平面的运动,而对保持架轴心轨迹的研究是三维空间内多自由度下的运动,二维平面图不能直接反映轴心轨迹的特征。
下文从保持架的运动轨迹着手,针对保持架轴心进行三维空间内动态轨迹分析,期望通过三维显示的方法,对保持架的轴心轨迹实现可视化,当然最后通过一些显示控制也可以进行不同研究条件下保持架质心轨迹的动态可视化显示。对保持架轴心轨迹的研究是基于保持架的几何特征,在保持架的刚体假设基础上,分析其自由度特点,利用数学方法求解自由度,通过三维显示的方法进行保持架轴心轨迹的三维重构。在Windows操作系统下,在C++Builder中通过对OpenGL函数库的调用,利用计算机图形学的知识和编程语言的方法,进行轴承主要部件的图形绘制,并显示出各部件的运动关系,突出保持架的轴心轨迹变化。
1 保持架自由度分析
保持架位于内、外圈狭小的空间内,装配时滚动体被压入保持架兜孔,滚动体和保持架之间有一定的间隙,基于这种装配关系,实际上保持架有6个自由度。保持架在三维坐标中的自由度关系如图1所示,在端面上建立径向相互垂直的2个坐标轴x1和y1,在轴线上建立z1轴。
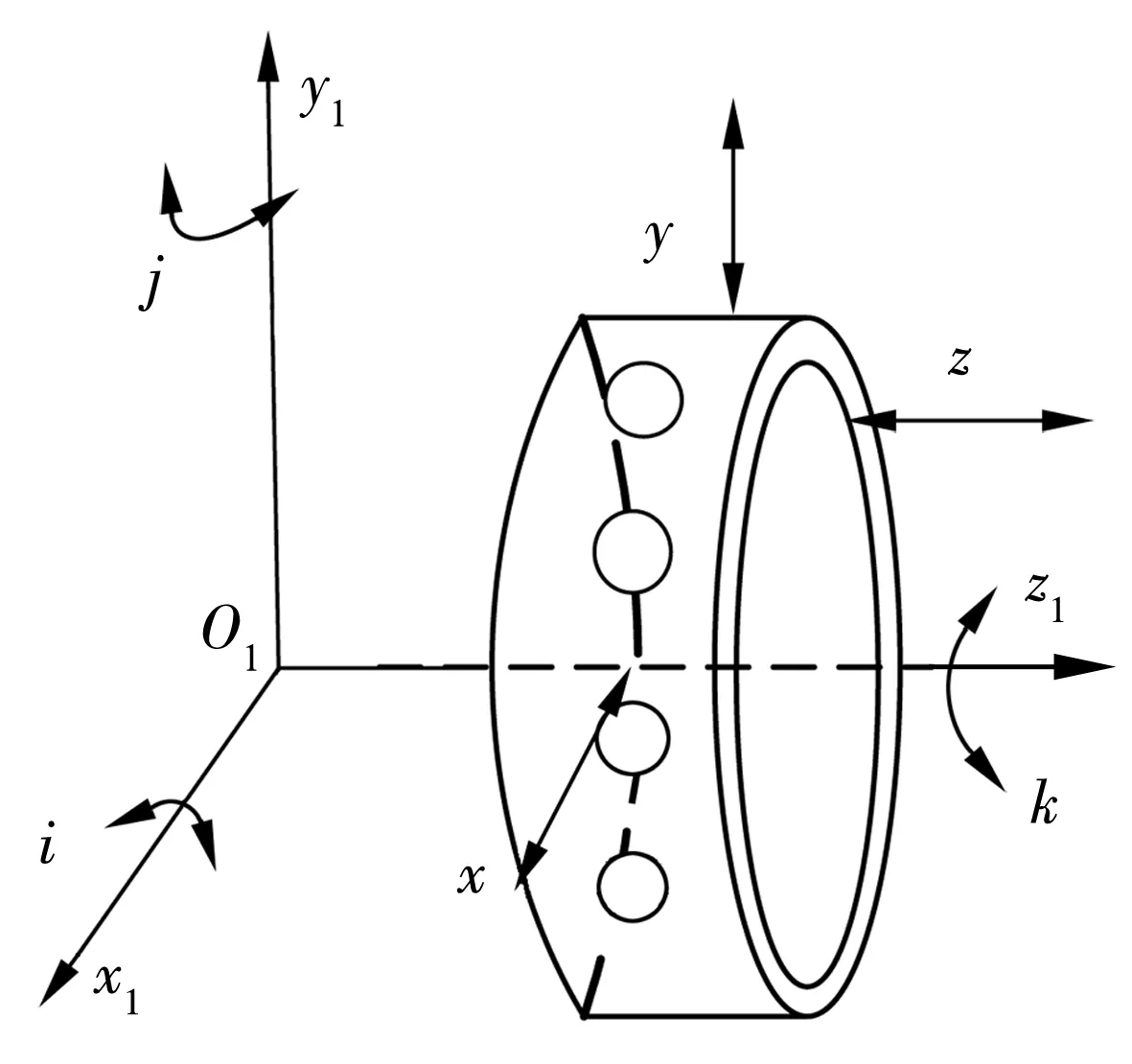
图1 保持架的自由度
保持架主要与滚动体接触,保持架在较小的运动范围内处于“自由”状态:在径向方向,由于滚动体和保持架之间的间隙,x1和y1方向上保持架具有2个平移自由度;由于受转速和载荷的作用,保持架还具有绕x1和y1轴的微小偏转角,在坐标中表示就是x1和y1方向的旋转自由度i和j;在轴线方向也即z1轴,保持架还具有沿着z1轴窜动的自由度,此外在滚动体的带动下,保持架在绕轴线公转的同时还具有绕z1轴转速波动的自由度k,这就是保持架在这种特殊空间内的“自由”状态。
保持架自由度构成的轨迹关系为
(1)
式中:dx,dy,dz分别为x1,y1,z1方向上各自平移自由度引起的位移;x1(j)为由y1轴旋转自由度j引起的x1方向位移;y1(i)为由x1轴旋转自由度i引起的y1方向位移;z1(i),z1(j)分别为x1,y1轴旋转自由度引起的z1方向位移;dx1,dy1,dz1分别为x1,y1,z1方向的总位移,这5个自由度x,y,z,i,j构成了保持架轨迹的变化。另外对于z1方向的旋转自由度k是绕z1轴转速的波动,并不会引起位移变化,不构成保持架轨迹的变化。
2 轴承主要部件的渲染
把OpenGL相关文件添加到所用的操作系统和编程环境当中[5],显示的流程和必要的显示环境渲染流程框图如图2所示。

图2 程序设计流程框图
用GLUquadricObj创建一个二次方程,在gluCylinder()中调用二次方程绘制部件中内外圈以及保持架的圆柱面,用gluDisk()调用二次方程绘制部件中的端面,可以用glutSolidSphere()绘制实体滚动体。需要注意的是,在这些绘制中均是创建实体图形,必要时用glCullFace()选择消除绘制图形当中处在实体内部的面,当然也可以用OpenGL中的基本图元(比如说三角形)结合一些编程语言的循环语句创建实体图形。保持架的绘制是一个圆筒体和滚动体之间的布尔运算,也即用滚动体切除圆筒体以得到保持架。为了使轴承零件的显示更加真实,须调用颜色函数颜色glColor3ub(r,g,b),这样可以使零件的颜色更加多样化,在深度缓冲、模板测试、光照处理等渲染中,色彩变化才能达到虚拟现实的效果。各零件的模型显示效果如图3所示。
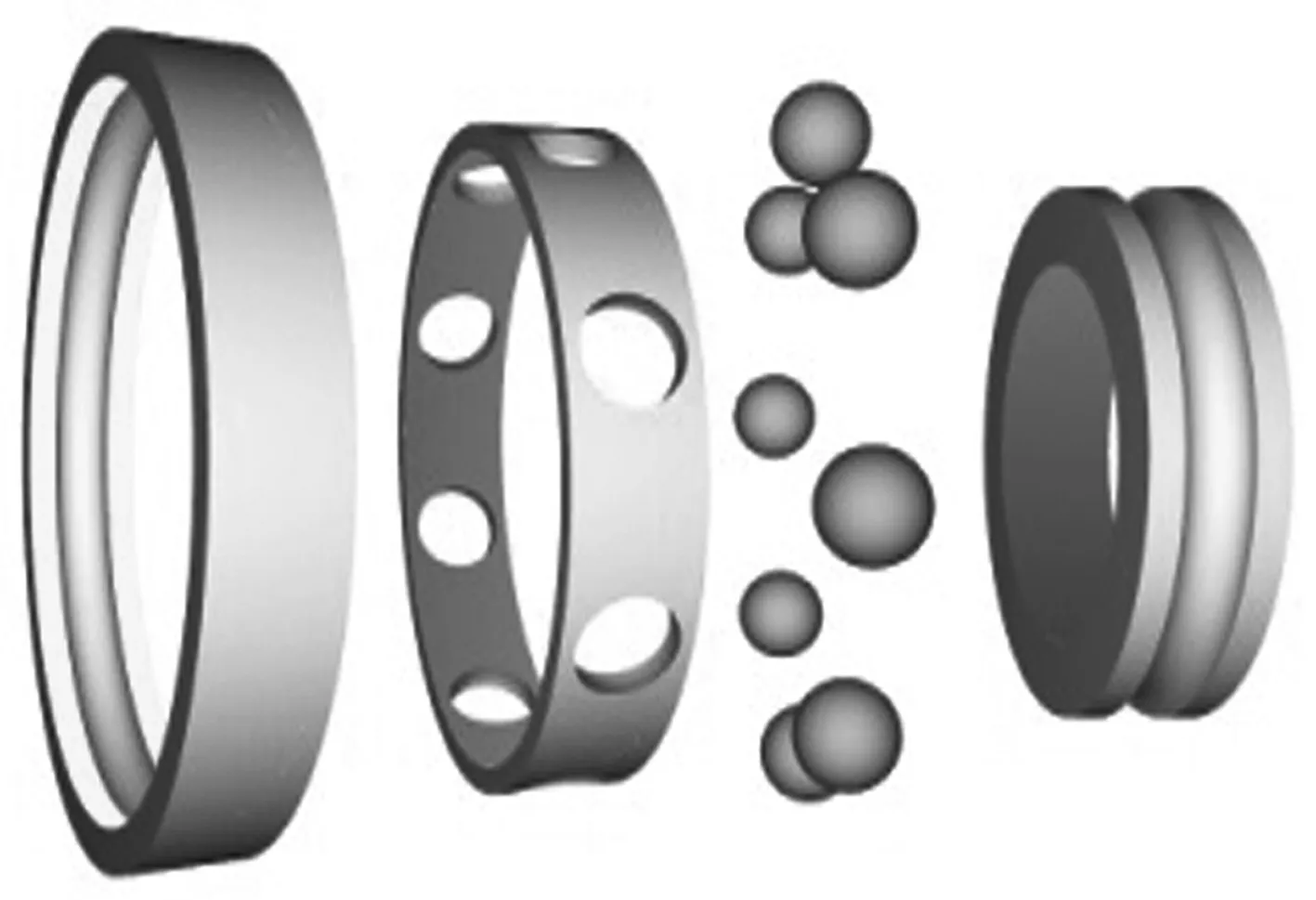
图3 轴承主要零件的显示效果
3 保持架三维动态轨迹重构
要进行轴承保持架轨迹的动态显示,必须解决保持架自由度的大量数据刷新和刷新频率2个问题。在OpenGL中双缓冲(RC与DC)技术为大量数据的刷新提供了可行方法[6],可通过调用TimerFun()函数来调节合适的刷新时间。
装配关系的动态显示,先调用glTranslatef()将各部件的装配中心选择在窗体中心位置;glRotatef()用于选择各部件绕x1,y1,z1(图1)的旋转轴,即由(angle,i,j,k)决定的向量,分别改变其中的参数angle,用于表示各零件在坐标系中绕z1轴公转下不同的公转转速;对于滚动体的转动,先用glTranslatef()把绘图中心确定在内、外圈之间的中心位置,再用glRotatef()选择平行于z1轴的旋转轴,也即滚动体的转动是由公转和自转组成。由保持架自由度所构成的轨迹变化中,3个平移自由度分别用glTranslatef()改变其中对应平移轴的位移参数,以显示所在轴线发生的平移位移;绕x1,y1的旋转自由度,分别用glRotatef()改变其对应轴线的偏转角度;最后对保持架绕z1轴公转时的转速波动,用glRotatef()改变对应z1轴的参数angle。这样在同样的时间函数调用下就可以形成6个自由度叠加所组成的保持架轨迹三维动态重构。保持架轨迹轴向总位移和径向总位移分别如图4和图5所示。
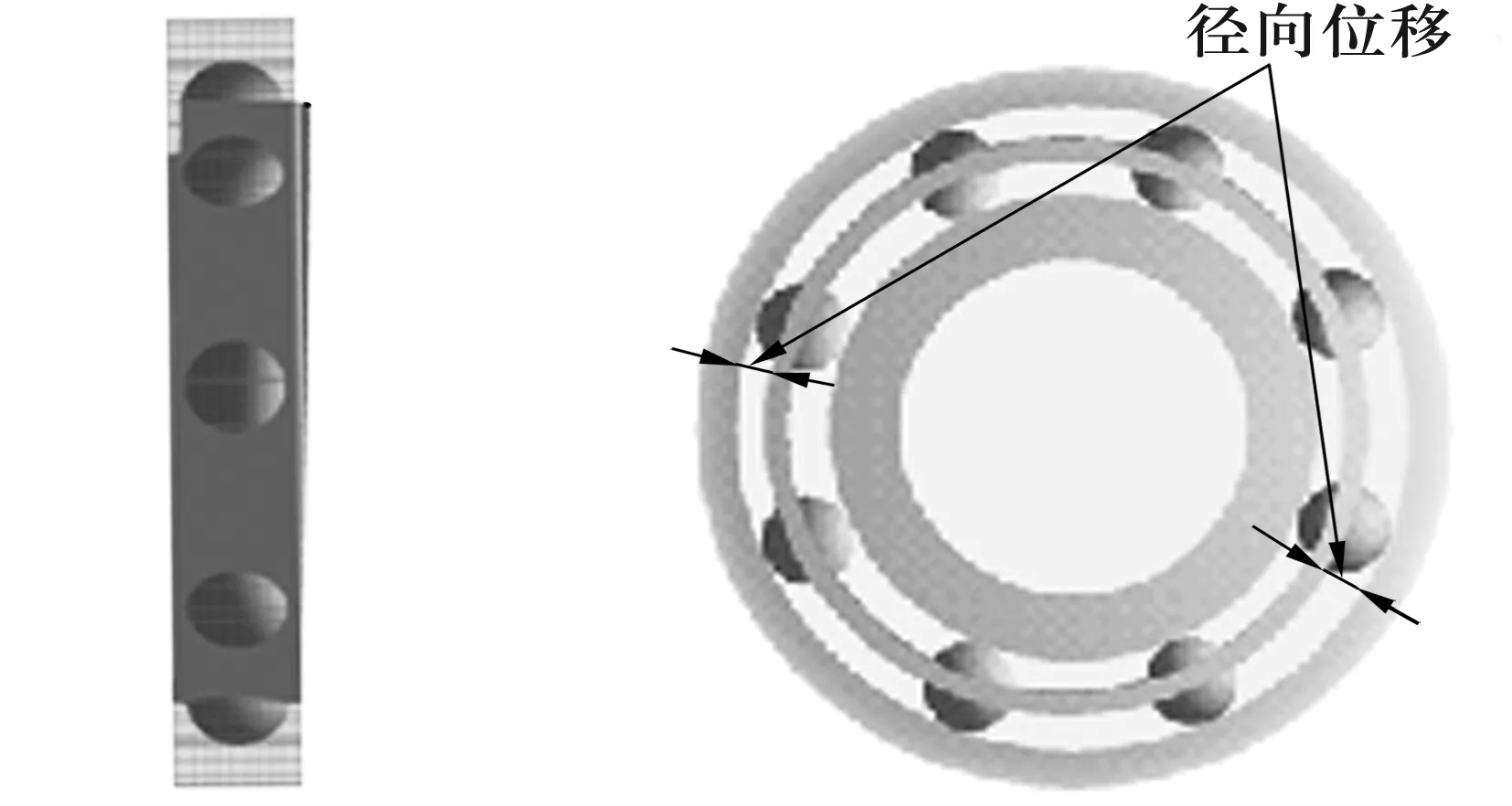
图4 轴向总位移 图5 径向总位移
4 显示过程中的功能控制
为了更加清楚地观察轴承保持架的三维轨迹变化,在窗体上还创建了功能键和菜单中的控制。菜单控制包括光源模式的选择,纹理的选择应用,以及保持架轨迹的数据文件输入接口。键盘的旋转视角控制“U”和“D”,“L”和“R”分别表示绕x1轴和y1轴旋转之后的视角,另外有平移、绕任意轴旋转、放大缩小控件,这些快捷控制可以改变任意视角,以便于观察轴承运转中的细节过程。最终显示的界面如图6所示,图中给出了保持架的三维轨迹图,并进行了相应的三维动态显示。
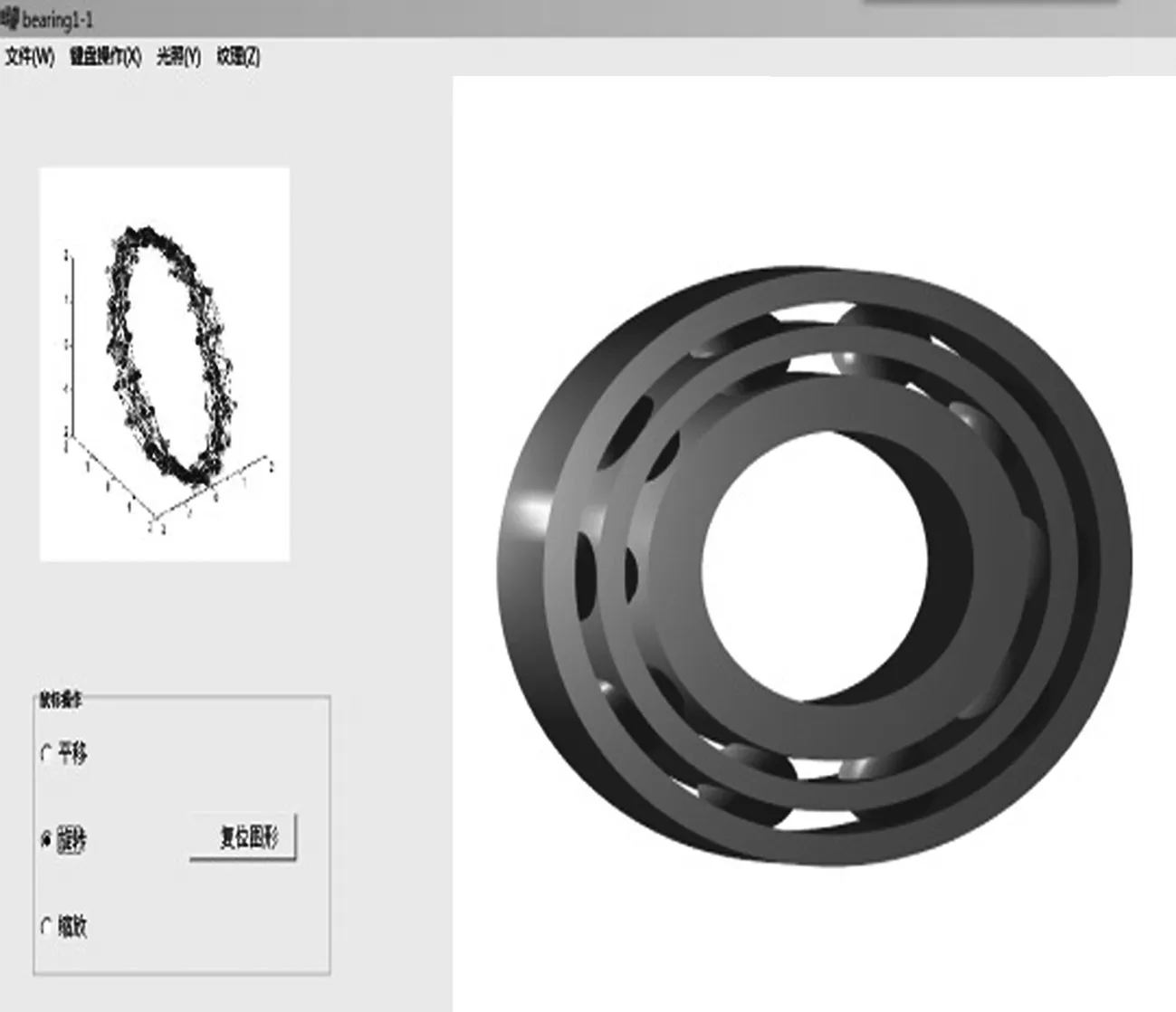
图6 显示界面
5 结束语
分析了6自由度下保持架的三维轨迹构成,介绍了利用OpenGL的函数库和三维图形动态渲染原理,实现保持架运动轨迹重构的方法;在C++Builder的编译环境下,把保持架的自由度数据输入程序,可以得到保持架轨迹的三维动态显示,为搭接虚拟现实试验平台,进而实现保持架运动轨迹的可视化提出了可行方案。文中提出的空间轨迹提取和3D显示方法可为进一步研究保持架动态轨迹提供参考。