预警机对战斗机的远距引导效能分析与评估
2015-07-26龙文彪
彭 芳,吴 军,马 健,龙文彪
(空军工程大学航空航天工程学院,陕西西安710038)
预警机对战斗机的远距引导效能分析与评估
彭 芳,吴 军,马 健,龙文彪
(空军工程大学航空航天工程学院,陕西西安710038)
预警机对战斗机的远距引导效能是预警机作战效能体现的重要环节。为实现对远距引导效能的定量分析与评估,以远距引导成功概率作为效能指标。首先,将远距引导分解为水平与垂直引导,采用平行接近法建立引导误差分析的数学模型。其次,依照航向均方根误差的推导流程,推导得到俯仰角均方根误差的表达式,建立了基于概率分析法的远距引导效能模型。最后通过设置仿真拦截场景,分析了目标截获距离与参数测量精度、拦截速度、搜索空域等参数对远距引导成功概率的影响规律,验证了模型的有效性。
预警机;远距引导成功概率;垂直引导误差;拦截速度;搜索空域
0 引 言
21世纪的预警机由于集侦察、指挥、控制、引导、通信、对抗于一体,是信息化攻防体系中不可缺少的枢纽,预警机指挥引导下的空战已经成为未来超视距空战的主要发展趋势。预警机根据指挥中心命令,引导战斗机完成拦截任务,其通过无线电台用话音或数据链将目标的位置、速度、航向及与战斗机之间的相对距离、方向、速度差和高度差提供给战斗机飞行员,并且还提供战斗机应采用的飞行参数指令(主要为航速航向)以便占据空中位置优势与目标交会[1]。在这种引导方式中,战斗机上雷达可保持静默,仅依靠预警机通过链路传输的目标信息进行自主攻击,具有较好隐蔽性和先敌发现、先敌发射的优势,极大地提高其超视距空战的能力。开展预警机指挥引导战斗机任务下的作战效能评估研究,对预警机的战术指标论证、战斗机击毁空中目标的效能和体系化作战训练都具有重要意义[2]。
利用预警机远距引导战斗机的能力实现对目标机的拦截,在发达国家中已具备成熟理论和相关技术,但是由于预警机在体系化作战中的重要地位及保密要求,在作战使用和效能评估等方面少有公开的相关资料[3-4]。国内有许多学者在这方面已开展了相关研究[510],并提供了一些可行的建议。文献[8]中采用概率分析法综合分析了远距和近距引导效能,按照水平导引误差服从正态分布的规律,建立了远距引导成功概率模型,而对于垂直面内的引导,认为实际引导中较容易实现而将其忽略;文献[9]中推导了预警机在方位和俯仰上的远距引导概率表达式,但没有给出垂直引导均方差的计算公式,在仿真分析时默认引导成功概率为1,没有考虑诸多因素对该概率值的影响;文献[10]以地面引导系统为平台,假设战斗机与目标已处于同一高度时,推导了对歼击机碰撞引导时雷达发现目标概率的数学模型,分析了影响概率变化的主要因素。但在实际超视距空战中不需要战斗机和目标机在同一高度平面,只要有一定的容许高度差即可,且不同的高度差对引导效能也有一定的影响。
因此,本文主要研究预警机采用概略引导下的平行接近法,模拟引导战斗机至拦截目标区域的整个过程,依据航向误差分析模型的推导过程,推导垂直引导误差分析模型,构建了远距引导成功概率数学模型,并通过设置典型场景仿真分析目标参数测量精度、战斗机所用机载雷达的性能参数(如截获距离、方位搜索与俯仰搜索方式等)、目标特性等主要因素对远距引导效能的影响规律,证明了该模型的有效性。
1 引导误差分析模型
1.1 平行接近法
预警机的指挥引导方法一般有纯追踪法、平行接近法、捕获法和机动法等。当按照平行接近法[1]进行远距引导时,战斗机直接飞向与目标机的相遇点,观测线旋转角速度等于零(即连接战斗机和目标的直线平行移动)。战斗机与目标机的几何位置模型如图1所示。图1中,目标机、战斗机分别以VT和VJ的速度进行匀速直线运动,经时间t后,两机在B点碰撞。该方法的重要优点是可以引导战斗机以最小时间沿着直线轨迹到达碰撞点,同时战斗机的过载不会超过目标机动时攻击目标的过载。与其他引导方法相比,该方法的捕获性能更好,便于工程实现。

图1 战斗机与目标机的几何位置模型
由图1中几何关系可知

式中,q为目标进入角;φL为前置角;R为战斗机上雷达截获距离在水平面上的投影;.R为R的变化率。式(1)给出了前置角与进入角之间的关系。
1.2 水平远距引导误差分析模型
水平引导误差为碰撞线路战斗机的航向误差,即战斗机的正确航向与实际航向的误差。该误差主要由下列因素所产生:预警机上的预警雷达测量目标距离和方位的误差;其飞行控制指令通过数据链传递给战斗机过程中可能出现的传输误差;飞行员执行引导命令驾驶飞机可能产生航向误差;飞机的操纵性能等。其误差分析几何图如图2所示[10]。
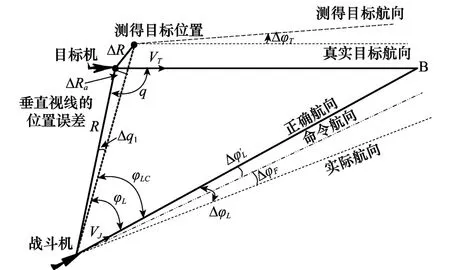
图2 水平引导误差几何图
图2中,Δq1为战斗机-实测目标视线与战斗机-真实目标视线之间的误差,由于ΔRa≪R,可近似为Δq1≈ΔRa/R,其中ΔRa为垂直于视线方向的位置误差。
由于预警机存在有q和VT的测量误差,无法获取精确的φL,只能求出指令航向角φLC。其中,q的误差Δq包含两项:目标航向测量误差ΔΦT和Δq1(其大小与R值有关)。由于以上误差的存在,引导系统相对于错误视线计算了一个需要的前置角φLC,将其按照泰勒级数展开,并利用关系式Δq=Δq1+ΔΦT,则有

对式(1)求微分,可得

代入式(3),则有

由图2给出的几何关系,可知命令航向与正确航向之差Δφ′L为
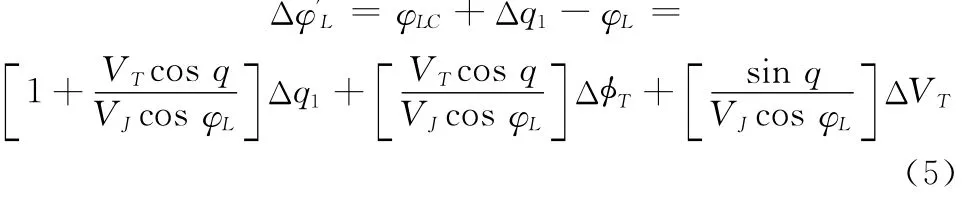
利用式(2)和Δq1≈ΔRa/R,式(5)第1项表示为

因此,由于战斗机上导航设备的航向测量误差使得飞机不能按命令航向飞行,使得实际航向与命令航向之间的误差为ΔφF,则总航向误差ΔφL的表达式为
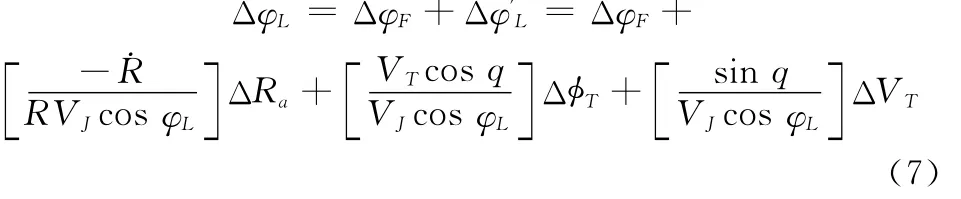
若以上各误差因素互为独立,则碰撞路线的航向误差可用均方根误差σφL来表示,即
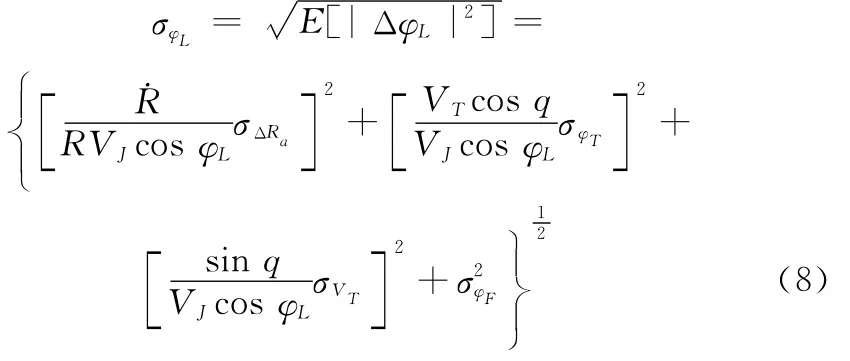
由于引导系统的不确定性,产生了航向误差,使得战斗机所需的前置角以均方差σφL绕φL值呈正态分布。根据预警机给定的测量数据:σΔRa(垂直于视线方向的位置测量精度)、σΦT(目标航向测量精度)、σVT(目标速度测量精度)、σφF(实际航向与命令航向之差的均方根误差)以及VT、VJ等运动参数,代入式(8),即可求取σφL。
1.3 垂直远距引导误差分析模型
在对引导误差进行分析建模时,通常重点考虑由航向误差所带来的方位角搜索范围,对于垂直面的引导,一般认为若测高误差以均方根值σH表示,则垂直引导误差沿俯仰角真值呈正态分布时,目标几乎100%出现在±3σH的高度范围内。
对预警机而言,预警雷达对目标的测高方法主要是测出对目标的相对仰角,然后利用机上导航数据,按照预警机的高度、攻角以及目标的距离解算出目标高度H,由于测量误差的存在,导致目标实际与测量的高度有一个高度差ΔH。由ΔH所导致的垂直引导误差对远距引导成功概率有一定的影响。因此,对俯仰搜索角大小的选择,主要由预警雷达对目标的测高误差和战斗机上机载火控雷达的性能决定。为实现定量分析,建立垂直引导平面的误差分析模型如图3所示。

图3 垂直引导误差几何图
图3中,Rs为战斗机的最大截获距离,当战斗机和目标机位于同一高度时,R=Rs;h为在能发现目标的情况下,拦截机与目标机的允许高度差(上视、下视或等高等方式进入);ΔH是目标测高误差;βL指在允许的高度差范围和最大截获距离上需要的仰角真值;Δβ是由测高误差对应产生的仰角误差。由于目标测高误差的存在,引导系统相对于测高误差ΔH计算了一个需要的俯仰角βs。由图3中的几何关系,可得到俯仰搜索角βs的表达式为

将式(9)按泰勒级数展开,可得实际仰角与真实仰角的误差Δβ为


由式(11)可以看出,由于预警机探测系统的不确定性,产生了高度测量误差,使得战斗机雷达搜索所需的俯仰角以均方根偏差σβL绕βL呈正态分布。根据测高精度σΔH以及h、Rs等已知的相关参数,代入式(11)便可求取σβL。
2 远距引导成功概率模型
采用远距引导成功概率作为引导效能指标。在水平引导中,由于航向引导误差σφL沿φL呈正态分布,如果雷达的方位搜索角为±φa,此时机载雷达探测到目标的概率为搜索角±φa之间的面积,则预警机指挥引导战斗机在方位搜索范围看到目标的概率PV1为

式中,E为航向误差分布的概率偏差,E=0.675σφL。
同样,垂直引导误差σβL沿βL呈正态分布,如果战斗机雷达的俯仰搜索范围为±ε,则预警机指挥引导战斗机在该范围看到目标的概率PV2为

预警机对战斗机的远距引导中,其水平引导误差和垂直引导误差是相互独立的。根据积分函数性质,利用二重积分可得预警机远距引导成功概率PV的数学表达式为

由式(14)可知,PV值的大小由水平和垂直引导误差的均方根所决定;而由式(8)和式(11)可知,这两个参数的大小与预警机给出的目标参数测量精度、目标进入角的大小、战斗机与目标机的速度、两机间的容许高度差、战斗机的最大截获距离,以及方位和俯仰搜索范围等紧密相关,将相关数值代入式(14),即可计算远距引导成功概率。如果该值越高,表示战斗机雷达开机后发现目标的概率也越高,意味着预警机的远距引导效能也越好,因此该评估模型与实际情况相符合。
3 算例与分析
原始数据设置如下:σΔRa=4 km,σVT=50 m/s,σφF=5°,VT的马赫数为1.58,VJ的马赫数为1.2,h=3 km,φa=40°,ε=15°,Rs= 45 km。
3.1 航向测量精度对远距引导效能的影响
部分参数设置如下:σΦT=0.5°~10°,q=5°,σΔH=1 km,Rs1=20 km,Rs2=25 km,Rs3=30 km,其他条件同原始数据。分析不同的截获距离下,预警机的目标航向测量精度σΦT对远距引导成功概率的影响,如图4所示。

图4 目标航向测量精度与远距引导成功概率的关系
图4中,当进入角和截获距离一定时,远距引导成功概率随目标航向测量精度的降低呈非线性下降。当航向测量精度取值为0.5°时,截获距离为20 km时对应的概率为0.947,而截获距离为30 km所对应的概率为0.996。说明增大截获距离可较快提高远距引导成功概率。图4中曲线变化趋势与文献[10]中相吻合。
3.2 战斗机拦截速度对远距引导效能的影响
部分参数设置如下:q=0°~360°,VJ1的马赫数为1.2,VJ2的马赫数为1.4,VJ3的马赫数为1.6,VJ4的马赫数为1.75,σΦ7=3°,σΔH=1 km,其他条件同原始数据。分析在不同的进入角下,战斗机的拦截速度对远距引导成功概率的影响,如图5所示。
图5 战斗机速度与远距引导成功概率的关系
当q=0°时,战斗机拦截方式为迎头拦截;当q=180°时,战斗机为尾后拦截方式。由图5可见,由于战斗机可能出现在目标的左或右侧,其探测与机动能力是左右对称的,因此概率曲线为轴对称图形。当拦截速度的马赫数为1.75具有超音速巡航能力时,如果以概率值0.5为评估标准,则前半球的有效进入角范围为±47°(以q=0°为中心),后半球(以q=180°为中心)的有效进入角范围为±43°。在前半球的±29°范围和后半球的±34°范围内,其远距引导概率为0.98以上。当从其他角度进入时,远距引导成功概率急剧下降,最小值为0.002 5,这是由于载机位于目标两侧时,受机动能力的限制来不及转弯的原因。同时,改变战斗机的拦截速度,使之从小于到大于目标速度而变化,可知前半球和后半球的有效引导进入角区间逐渐增宽,说明进入方式和拦截速度的大小对远距引导效能有着显著的影响。
3.3 战斗机雷达搜索范围对远距引导效能的影响
设战斗机雷达体制为有源相控阵雷达,仿真参数调整为:方位波束宽度为3°,波束俯仰宽度为5°,方位最大搜索范围为±60°,俯仰最大搜索范围为±40°,q=0°(迎头拦截),VJ的马赫数为1.6,其他条件同原始数据。同时改变方位上的搜索波位数m和俯仰上的搜索波位数n,探讨战斗机达到指定引导区域且雷达开机后,雷达搜索空域大小与远距引导成功概率的关系,如表1所示。
表1 方位和俯仰搜索范围与远距引导成功概率的关系
当战斗机雷达的方位和俯仰波束宽度已知时,由表1可知,当方位和俯仰均用一个波位扫描时,引导效能很差,其引导成功概率值仅为0.243 8。设定俯仰角以一个波位搜索,然后增大方位搜索的波位数,可使远距引导成功概率值显著提高,如果增大俯仰上的搜索波位数,可知当天线扫描范围为方位±15°/俯仰±10°时,其对应的概率提高到0.943 1。因此,增大天线的扫描范围可以提高远距引导成功概率。同时,俯仰扫描增大为3个波位以上,引导成功概率无改变。
3.4 目标测高精度对远距引导效能的影响
仿真参数调整为:σΔH=0.5~5 km,q=180°(尾后),VJ的马赫数为1.6,φa1=30°,ε1=10°,φa2=45°,ε2=20°,Rs1=20 km,Rs2=30 km,Rs3=40 km,其他条件同原始数据。分析在不同的截获距离,以及不同的天线扫描范围下,预警机的目标测高精度对远距引导成功概率的影响,如图6和图7所示。由图6可知,在尾后拦截方式下,当截获距离一定,远距引导成功概率随目标测高精度的降低而呈非线性的下降。以截获距离40 km为例,当测高精度为1.5 km时,对应的概率约为1,当测高精度下降为3 km时,此时概率值约为0.9,下降幅度约为10%。当截获距离变短,远距引导成功概率受目标测高精度的影响更为明显。

图6 目标测高精度与远距引导成功概率的关系(±30°/±10°)
图7 目标测高精度与远距引导成功概率的关系(±45°/±20°)
与图6相比,图7中增大了天线扫描范围,其他条件未变,仍对截获距离为40 km的曲线进行观察,可知扫描范围的增大明显地改善了目标测高精度在1.5~3 km这个区间的远距引导成功概率,大于3 km后引导效能也有较大幅度提升。
4 结 论
本文研究了预警机执行对战斗机的远距引导任务时的引导效能评估模型。在平行接近引导方法下,给出了航向误差均方根和俯仰角误差均方根的计算公式,并以远距引导成功概率为指标建立了引导效能数学模型,通过仿真分析与验证可知,当目标机速度一定,预警机对目标相关参数的测量精度、战斗机雷达的性能指标、战斗机的拦截速度以及战斗机导航系统的精度都是影响预警机远距引导效能的重要因素。具体结论如下:
(1)通过深入分析预警机对目标的航向测量精度、战斗机雷达的截获距离与远距引导成功概率之间的关系,由这两个因素所引起的引导效能的变化趋势与文献[10]中相一致,验证了远距引导效能模型的合理性。
(2)进入角的大小和战斗机的速度是影响远距引导效能的主要因素。根据式(8),如果拦截速度增大,其他条件不变,其航向误差均方根就会减小,由式(14)可知,远距引导概率值将会提高。因此,当战斗机以低于目标机的速度进行拦截时,其进入角应在迎头和尾后的有效引导区间中进行选取。当拦截速度大于目标速度时,前半球和后半球的有效引导进入角区间将进一步增宽,进入方式也更为灵活。为了避免目标机对我防区的进一步深入,宜采用迎头拦截方式。
(3)远距引导效能与战斗机雷达的截获距离有关,较远的截获距离具有较高的远距引导成功概率。战斗机雷达在空-空搜索与跟踪中有多种工作方式,不同工作方式下的作用距离在上视/下视、迎头/尾后等情况下都有不同的指标。当战斗机到达引导区域后,机载雷达可采用边速度搜索边测距的迎头拦截方式(上视/下视)、边搜索边测距的迎头上视方式、边扫描边跟踪的迎头拦截等方式,这几种方式对应的作用距离远,均可获得较高的远距引导概率。
(4)天线在方位和俯仰上扫描范围的大小影响着远距引导效能,其中影响的主要因素是方位搜索角的大小,俯仰搜索角大小对引导概率的影响较小。原因是通过增大方位搜索范围,体现为航向引导成功概率的增加,从而保证了较高的目标发现概率。
(5)由于预警机探测目标时存在测高误差的问题,因此也将对远距引导效能产生一定影响。预警机平台不同,其测高精度也不相同,如果测高误差较大,当截获距离和载机速度一定,可以通过增加战斗机雷达的搜索范围以减轻该因素所产生的影响。
[1]Luo J X.Principle of aircraft commanded&controlled by AWACS and formation operation[M].Beijing:Liberate Army Press,2009.(罗继勋.预警机指挥控制飞机及编队作战原理[M].北京:解放军出版社,2009.)
[2]Guo H,Xu H J,Liu L.Measurement of combat effectiveness of early-warning aircraft based on interval number[J].Systems Engineering and Electronics,2010,32(5):1007-1010.(郭辉,徐浩军,刘凌.基于区间数的预警机作战效能评估[J].系统工程与电子技术,2010,32(5):1007-1010.)
[3]Ryoo C K,Cho H,Tahk M.Time to go weighted optimal guidance impact angle constraints[J].IEEE Trans.on control systems technology,2006,14(3):483-492.
[4]ГуoeйновАБ.ЭффективностъКомплксовЛА[M].Москва:ИздатепьствоМАИ,1985.
[5]Liang G D,Lu G S,Zhang A,et al.Grey comprehensive relational analysis of fighting efficiency influencing factors of AEW radar[C]∥Proc.of the International Conference on Electric and Electronics,2011:753-760
[6]Yu L,Li Y J,Ou J J.Research of optimal guidance algorithm for modern fighter[J].Acta Aeronautica et Astronautica Sinica,2006,27(2):314-317.(于雷,李言俊,欧建军.现代战机最佳导引算法研究[J].航空学报,2006,27(2):314-317.)
[7]Han Q,Wei X Z,Zhang B.Realization of auto-attacking control law for long-distance guidance of fighter planes[J].ElectronicsOptics&Control,2012,19(6):36-40.(韩庆,魏贤智,张斌.远距引导战斗机自动攻击控制律实现[J].电光与控制,2012,19(6):36-40.)
[8]Ma D L,Zheng J A.Fighter's guidance effectiveness based on probabilistic method[J].Acta Aeronautica et Astronautica Sinica,2008,29(2):3521-356.(马东立,郑江安.基于概率分析法的歼击机导引效能[J].航空学报,2008,29(2):3521-356.)
[9]Pei Y.Effectiveness analysis and evaluation of early-warning aircraft in air-defense early-warning and intercept guidance[J].Electronics Optics&Control,2007,14(6):43-47.(裴云.预警机系统防空预警及拦截引导效能分析与评估[J].电光与控制,2007,14(6):43-47.)
[10]Fu H F,Liu H Wi,Zhang Z L.Affecting factors of fighter's interception efficiency in collision-course guidance[J].Electronics Optics&Control,2007,14(1):17-21.(付海峰,刘华伟,张宗麟.歼击机碰撞引导截击效能的影响因素分析[J].电光与控制,2007,14(1):17-21.)
Effectiveness analysis and evaluation of the early warning aircraft steering the fighter based on long-distance guidance
PENG Fang,WU Jun,MA Jian,LONG Wen-biao
(Air Force Engineering University,Aeronautics and Astronautics Engineering School,Xi'an 710038)
It is importance tache of the early warning aircraft's battle effectiveness that to steer fighter in long-distance.In order to quantitatively analyze and evaluate the long-distance guidance effectiveness,long-distance guidance successful probability is given as theindex for effectiveness.Firstly,the course of long-distance guidanceis divided into horizontal and vertical guidance,and the error analysis models of the horizontal guidance and the vertical guidance are built up according to parallel approach guidance rule.Secondly,according on root mean square error of the course is derived,the root mean square error of elevation is also obtained through derivation,meanwhile long-distance guidance model is built up based on probability analyze method.Finally,an example of a fighter intercepting a target by the early warning aircraft's long-distance guidance is given to analyze effect rules of primary parameters on long-distance guidance probability,including target intercept-distance,target parameters measure precision,intercept-speed and antenna scan area.Simulation results prove the effectiveness of the proposed model.
early warning aircraft;successful probability of long-distance guidance;vertical guidance error;intercept speed;scan area
V 271.4 文献标志码:A DOI:10.3969/j.issn.1001-506X.2015.09.14
彭 芳(1973-),女,讲师,博士,主要研究方向为雷达信号处理、预警探测技术。
E-mail:wuboy0210@163.com
吴 军(1972-),男,副教授,主要研究方向为作战任务规划。
E-mail:wuboy0210@163.com
马 健(1972-),男,讲师,博士研究生,主要研究方向为雷达信号处理。
E-mail:majiankgy@163.com
龙文彪(1989-),男,硕士研究生,主要研究方向为机载传感器管理技术。
E-mail:631170657@qq.com
1001-506X(2015)09-2046-06
2014-10-27;
2015-03-12;网络优先出版日期:2015-05-28。
网络优先出版地址:http:∥www.cnki.net/kcms/detail/11.2422.TN.20150528.1029.003.html
航空基金(20145596025)资助课题
