综合作战区舰载预警机防空警戒控制策略研究
2015-07-26段晓稳高晓光
段晓稳,高晓光,李 波
(西北工业大学电子信息学院,陕西西安710129)
综合作战区舰载预警机防空警戒控制策略研究
段晓稳,高晓光,李 波
(西北工业大学电子信息学院,陕西西安710129)
为了研究航母编队在综合作战区内针对多威胁来源指派舰载预警机实施防空警戒时的控制策略问题,首先分析了舰载预警机巡逻策略生成的流程,以流程为主线,依次研究了敌方机场的作战能力及作战剖面、护航舰艇编队及舰载预警机的警戒区域,在此基础上,以空域栅格为单位,研究其对应的预警效果和威胁程度的评价方法;然后通过分析实际需求,提出了“指定架次型”“不考虑成本不指定架次型”和“考虑成本不指定架次型”3类可实现警戒接班任务的巡逻策略规划模型并分别针对性地提出了多主单从结构的多种群并行遗传算法模型求解方法。仿真结果表明,所提出的模型能够实现相应的巡逻策略规划功能,所提出的模型求解算法能够实现对相应模型的高效求解,即模型和算法的有效性得到了验证。
航母编队;预警机;防空警戒;综合作战区;并行遗传算法
0 引 言
航母编队综合作战区,是为了保障航母编队顺利对敌岸实施打击,封锁、控制局部地区海空域而设置的综合防护区。航母编队进入综合作战区后,可能受到来自陆上不同机场战机的空中打击,加强对空防御以保证航母平台的安全是航母编队指挥员应优先考虑的问题[1-3]。然而,有效的空中防御必须以有效的早期空中预警为前提。航母编队的早期空中预警是依赖于装备在不同舰艇平台上的舰载固定翼预警机和舰载预警直升机实现的,所以如何根据敌我态势针对各舰载预警机制定合理有效的巡逻策略具有非常重要的意义[4-5]。
针对舰载预警机的巡逻策略规划问题,仅有少量文献进行了研究。文献[2,6-8]的研究思路类似,均是在考虑威胁源和航母编队相对态势下基于指定准则,通过解析法确定预警机的巡逻区域,研究对象局限于单架固定翼预警机或单架预警直升机的单次巡逻规划。而实际上,航母编队经常面临来自多个方向不同程度的威胁,单架预警机由于预警能力的限制,无法实现对各威胁源的有效预警,所以可能需要多架预警机协同执行巡逻任务,包括装备在航母平台的固定翼预警机和护航舰艇平台上的预警直升机[9-10]。同时,舰载预警机对航母编队的防空警戒是一个持续的动态过程,所以在进行巡逻策略规划时,不仅要考虑首波预警机的巡逻策略,还要考虑第2波预警机的接班策略,以及各阶段巡逻效果的均衡化和整体巡逻代价的最小化。可见,针对多架异构异所属舰艇平台预警机的多决策机制巡逻策略规划问题是实际面临且亟待解决的。而且,这一问题本质上是一种由多个性能同/异构的节点协同实现区域覆盖的多目标优化决策问题,故对该问题的研究还有助于对无线传感器网络配置[11]、浮空器布局优化[12]及防空武器组网[13]等领域的相关研究。此外,该问题所研究节点还具有移动和多阶段(波次)的特点,这更增加了问题的复杂性。
鉴于现有研究中存在的不足,本文以多架异构异所属舰艇平台预警机的多决策机制巡逻策略规划问题为研究内容,首先分析建立了舰载预警机巡逻策略的生成流程,并以此为主线,依次分析航母编队的威胁来源及护航舰艇的警戒区域,并建立预警机巡逻覆盖空域的预警效果和威胁程度评价模型;紧随其后,通过分析指挥员在进行巡逻策略规划时的决策思路,依次提出了“指定架次型”“不考虑成本不指定架次型”和“考虑成本不指定架次型”3种巡逻策略规划模型及相应的多主单从(multi-master-single-slave,MM-SS)结构的多种群并行遗传算法(parallel genetic algorithm,PGA)模型求解方法[1415]。仿真结果证明了模型和算法的有效性。
1 舰载预警机巡逻策略生成流程
舰载预警机巡逻策略是在综合考虑敌方机场位置及战机性能参数、己方舰艇编队性能参数及舰载预警机性能参数的情况下,基于航母编队指挥控制中心确定的巡逻策略规划机制最终确定的。图1描述了舰载预警机巡逻策略的生成流程。
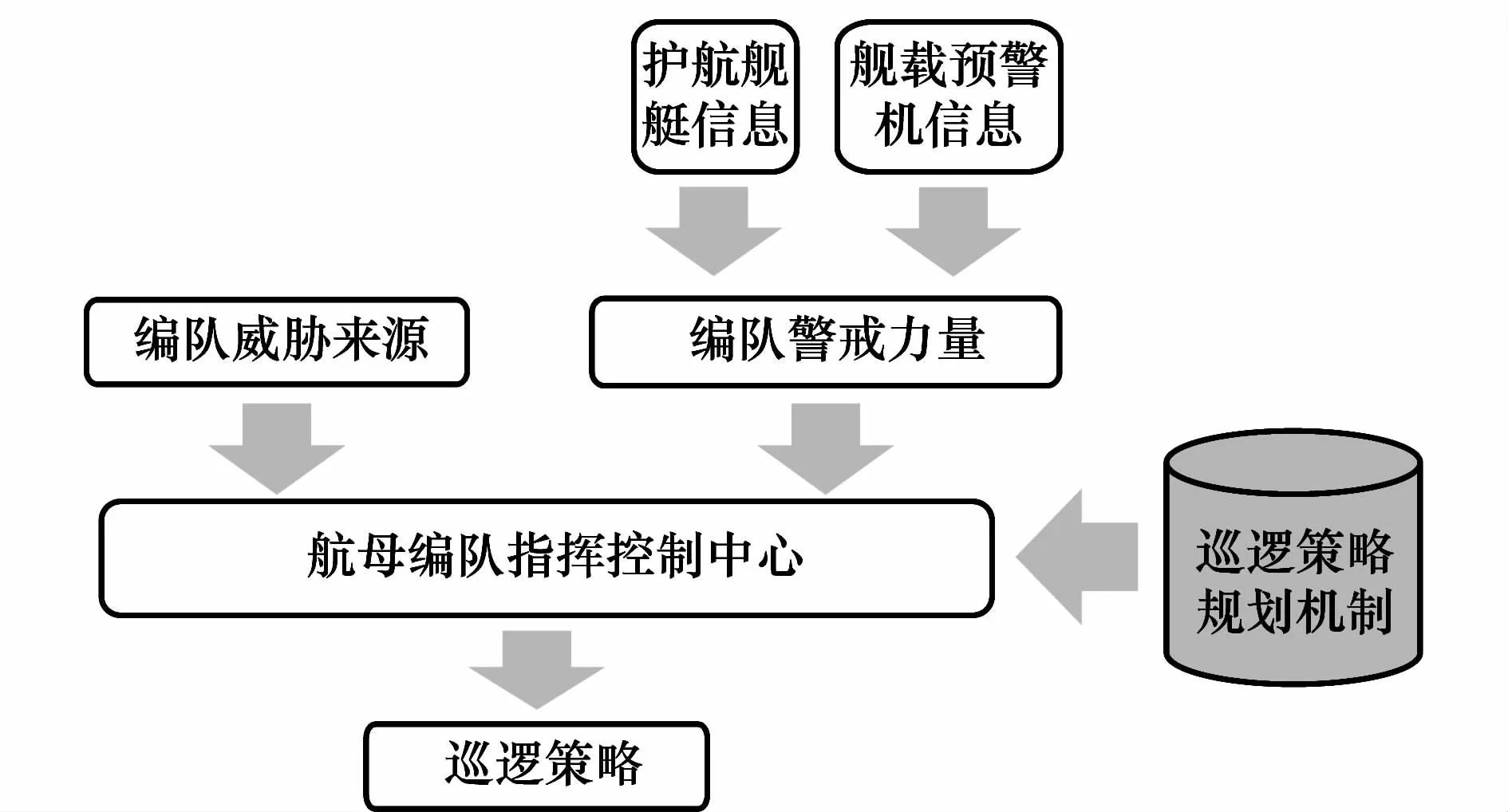
图1 舰载预警机巡逻策略生成流程
下面依次对航母编队威胁来源、航母编队警戒区域和舰载预警机巡逻策略规划机制进行分析。
2 航母编队威胁来源分析
在着手制定舰载预警机巡逻策略之前,必须首先充分分析航母编队所面临的敌方威胁。假设根据战前情报侦察获知可能威胁来自m个机场,其中,第i个机场表示为Ai(1≤i≤m),Ai的坐标表示为Ai(di,ηi),其中,di和ηi分别表示Ai相对于航母平台的距离和方位,第i个机场包含ni种类型的攻击机,第i个机场的第j类攻击机表示为Ai_Tj(1≤j≤ni),第j类攻击机共p(i,j)架,各型攻击机的反舰作战能力(简记为UCA)的计算公式[16]为

实际上,巡逻规划所需考虑的威胁攻击机是那些能够成功实现对航母编队空中打击的攻击机,以CA(i,j)表示Ai_Tj的有效作战能力,则

式中,IsCpb(i,j)用于描述Ai_Tj是否具有对航母编队实施空中打击的能力,计算公式为
式中,FR(i,j)、MR(i,j)、SR(i,j)和Avg V(i,j)分别表示Ai_Tj的有效航程、机载空地导弹射程、作战完毕时仍需具有的安全航程和作战过程中的交战区平均飞行速度;TCbt表示交战时间[17]。
3 航母编队警戒区域分析
3.1 护航舰艇编队警戒区域分析
护航舰艇编队作为航母平台的中层防御力量,承担了对突破外层舰载机防御圈的来袭目标的探测、跟踪和拦截任务。舰上装备的远程对空搜索雷达承担了对突袭目标进行探测和跟踪的任务,其覆盖区域是以护航舰艇为中心、以远程对空搜索雷达探测距离为半径的圆,而整个护航舰艇编队的预警范围便是各艘护航舰艇预警范围的并集。舰上装备的舰空导弹承担了对突破舰载机防御圈的突袭目标的拦截,其覆盖区域是以护航舰艇为中心、以舰空导弹射程为半径的圆,整个护航舰艇编队对目标的拦截范围便是各艘护航舰艇杀伤范围的并集。
3.2 舰载预警机警戒区域分析
通常情况下,舰载预警机进行空中警戒时的飞行航线呈双平行线型,其巡逻区域可通过区域中心与航母之间的距离d、区域中心相对航母的方位φ、区域直线段长度l、区域圆弧段半径r和区域偏转角θ这5个参数来描述,如图2所示。
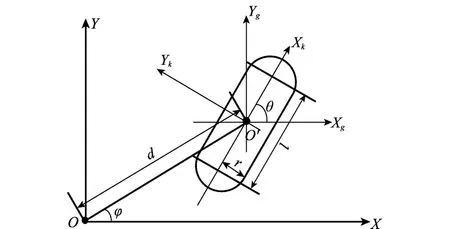
图2 双平行线型机动平面示意图
图2中O和O′分别表示航母平台和预警机巡逻中心的位置。l和r一般直接指定[9],所以待定巡逻区域参数包括φ、θ和d。以三元组<φ,θ,d>来描述待定巡逻区域参数,则确定预警机巡逻区域参数的问题即是确定该预警机<φ,θ,d>的问题。
假设预警机在空中静止时的探测范围为以载机所在位置为圆心、以雷达最大探测距离R为半径的一个圆,当载机沿双平行线型航线巡逻飞行时,这个探测圆就随之一起运动,这些运动圆的并集便是预警机巡逻飞行的探测总区域。如图3所示。
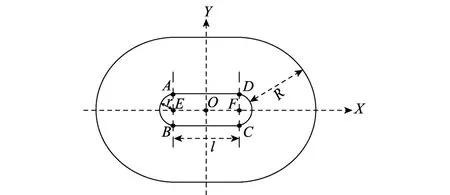
图3 预警机巡逻探测总区域示意图
4 舰载预警机巡逻策略规划机制
开始舰载预警机巡逻策略规划机制研究之前,必须首先确定预警机的拟定预警区域及对预警机巡逻过程中所覆盖区域的价值评价方法。拟定预警区域即是所有敌方攻击机可能来袭范围的并集,实际预警区域即是最终确定的各架预警机巡逻策略所对应的覆盖区域的并集。对覆盖区域价值的评价可以从区域所对应的预警效果和威胁程度以及对区域的覆盖时间3个角度来考量,下面分别就这3个因素进行分析。
4.1 预警效果
预警机在既定区域巡逻时所对应的预警效果可以通过机载预警雷达所覆盖区域内各栅格所对应的预警效果之和来衡量。栅格对应的预警效果是相对于机场攻击机而言的,其大小是相对各机场攻击机的预警效果之和。计算栅格所对应预警效果时需要考虑的因素包括:
(1)只有栅格处于敌方攻击机可能来袭的范围之内时,覆盖该栅格才具有价值;
(2)敌方攻击机的反舰作战能力越强,则覆盖该攻击机突防航线上栅格时价值越大;
(3)拟定预警范围之内,预警机对处于栅格处的敌方攻击机的预警概率越大,则覆盖该栅格时预警效果越好,该栅格价值越大;拟定预警范围之外,即使覆盖该栅格,仍认为该栅格无价值;
(4)如果栅格已被护航舰艇上的舰载预警雷达所覆盖,则认为预警机对该栅格的重复覆盖并不能提升整个航母编队的预警能力,即认为该栅格无价值。
以G(φ,D)表示相对航母平台角度为φ、距离为D的空域栅格,以WG(φ,D)表示G(φ,D)对应的预警价值,则WG(φ,D)的计算公式为

式中,IsInZ(i,j)用于判断G(φ,D)是否处于Ai_Tj的攻击剖面之内;CA(i,j)表示Ai_Tj的有效作战能力;DP(φ,D,i,j)表示预警机对处于G(φ,D)的敌方攻击机Ai_Tj的预警概率;OSDZ(φ,D)用于判断G(φ,D)是否处于舰艇编队的探测范围之外。分别给出IsIn Z(i,j)、DV(D)和OSDZ(φ,D)的计算方法。
(1)IsIn Z(i,j)的计算公式为

式中,Zi_j是指Ai_Tj突袭航母平台时可能飞行的椭圆区域。Zi_j的确定方法如下:
分析式中IsCpb(i,j)可以得出,Ai_Tj对航母平台的可能攻击剖面是一个由FR(i,j)、MR(i,j)、SR(i,j)、AvgV(i,j)和TCbt确定的椭圆区域。令

则Zi_j可表示为

(2)DP(φ,D,i,j)的计算方法
影响预警机对敌方攻击机预警概率的因素主要包括地球曲率、大气折射及吸收、地面杂波干扰、预警机与敌方攻击机之间的距离、敌方攻击机的雷达散射截面积和预警机性能等。在此,主要考虑预警机与敌方攻击机之间的距离以及预警机机载雷达的性能。以Gw和G分别表示预警机巡逻区域中心位置Gw(φw,Dw)和栅格位置G(φ,D),Gd表示Gw和G之间的距离(即Gd=|Gw-G|),Rmaxij表示预警机对Ai_Tj的最大预警距离,IsIn WD用于判断栅格是否处于拟定预警范围之内,则DP(φ,D,i,j)的计算公式[18]为

式中

式中,WDMax和WDMin分别表示拟定最远和最近预警距离。
(3)OSDZ(φ,D)的计算公式为

式中

nS表示护航舰艇数目;SDZi表示第i艘护航舰艇上远程预警雷达的探测范围;SDZT表示所有护航舰艇上远程预警雷达探测范围的并集。
设¯d′i和¯η′i分别表示第i艘护航舰艇相对于航母平台的距离和方位,DDi表示该艘舰艇上远程预警雷达的探测距离,则SDZi的计算公式为

4.2 威胁程度
预警机在既定区域巡逻时所受到威胁的程度可以通过巡逻过程中处于各离散点位置时所受到威胁的程度之和来衡量。假设将预警机飞行轨迹中直线段分割为mm等份,圆弧段分割为nn等份,则预警机在既定区域巡逻时受到的整体威胁可通过在这2(mm+nn)个离散位置处所受到威胁之和来衡量。离散点对应的威胁程度是相对于执行攻击机护航任务的战斗机而言的,其大小是所受到各护航战斗机的威胁之和。可以认为,攻击机的对舰打击能力越强,则其价值越大,对应的护航战斗机作战能力也越强。
以ECA(i,j)表示Ai_Tj对应的护航战斗机所具有的空战能力,则ECA(i,j)的计算公式为

计算离散位置所对应威胁程度时需要考虑的因素包括:
(1)只有离散位置处于敌方护航战斗机可能攻击范围之内时,预警机在该位置处巡逻才受到威胁;
(2)敌方护航战斗机的空战能力越强,则预警机处于离散位置时受到的威胁越大;
(3)拟定巡逻范围之内,离散位置距航母平台越远,则预警机处于该位置时受到的威胁越大;当离散位置距航母平台的距离大于拟定巡逻范围远界时,预警机受到的威胁为无穷大。当离散位置距航母平台的距离小于设定巡逻范围近界时,预警机不受到威胁。同时,执行预警机护航任务的护航战斗机的数量越大、作战能力越强,预警机受到的威胁越小。
(4)如果离散位置处于护航舰艇防空导弹杀伤范围之内,则认为预警机处于该位置时不受到威胁;
以G(φ,D)表示预警机巡逻过程中所处某离散位置,以TG(φ,D)表示G(φ,D)对应的威胁程度,则

式中,ECA(i,j)可根据式计算得到;DT(D)表示预警机处于G(φ,D)时受到敌方战斗机的威胁程度;OSAZ(φ,D)用于判断G(φ,D)是否处于舰艇编队防空导弹杀伤范围之外。下面分别给出DT(D)和OSAZ(φ,D)的计算方法。
(1)DT(D)的计算公式为

式中,ωe表示护航战斗机对预警机进行护航后预警机所受到威胁程度的下降系数,其计算公式为

式中,Nst和BCAst分别表示预警机巡逻时所配置基本护航编队中护航战斗机的数量和空战能力;Ne和BCAi分别表示护航战斗机的数量和第i架护航战斗机的空战能力。
当采用同型战斗机构成编队对预警机进行护航时,ωe可表示为

TDMax和TDMin分别表示拟定的最远和最近巡逻距离,105表示G(φ,D)对应的威胁程度不可接受(即预警机巡逻区域不能覆盖G(φ,D)),In、Out Longer和OutShorter分别表示离散位置处于拟定巡逻远界之外、拟定巡逻范围之内和拟定巡逻近界之外,即
(2)OSAZ(φ,D)的计算公式为

式中

SAZi表示第i艘护航舰艇上防空导弹的杀伤范围;SAZT表示所有护航舰艇上防空导弹杀伤范围的并集。
设ADi表示第i艘护航舰艇上远程舰空导弹的射程,则SAZi的计算公式为4.3 区域覆盖时间

预警机执行空中巡逻任务是一个持续的动态过程,所以计算巡逻效能时必须考虑实际的区域覆盖时间。
对于固定翼预警机,其仅能装备在航母平台上,设有效航程、作战完毕时仍需具有的安全航程、巡逻中心位置、巡逻速度、拟定巡逻高度和爬升角度分别为WV、SV、PCR、PV、PH和Cθ,考虑航母平台轴向相对指定轴向的方位角为ϖ,则预警机爬升到PH时位置CEP可表示为(PH·cot(Cθ)·cosϖ,PH·cot(Cθ)·sinϖ),区域覆盖时间的计算公式为

对于预警直升机,设其所属舰艇的坐标为SR,则区域覆盖时间的计算公式为

4.4 巡逻策略规划
在得到预警效果和威胁程度的计算方法之后,为了建立巡逻策略规划模型,还必须进行归一化处理[19]
式中
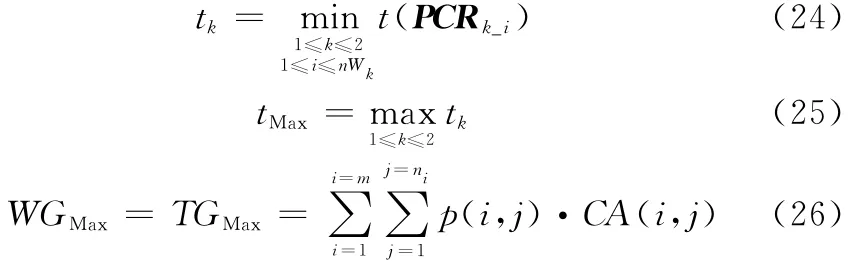
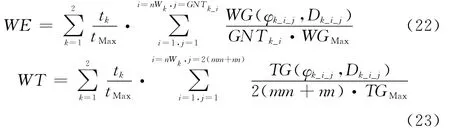
t(PCRk_i)表示第k波次第i架预警机的区域覆盖时间;tk表示第k波次预警机的区域覆盖时间;tMax表示两个波次预警机区域覆盖时间的最大值;WG(φk_i_j,Dk_i_j)和TG(φk_i_j,Dk_i_j)分别表示第k波次第i架预警机覆盖区域内编号为j的栅格所对应的预警效果和威胁程度;GNTk_i表示第k波次第i架预警机覆盖区域内栅格总数;WGMax和TGMax分别表示栅格所对应预警效果和威胁程度的最大值,分别根据式(4)和式(13)得到;tk/tMax实现对第k波次区域覆盖时间的归一化;WG(φk_i_j,Dk_i_j)/WGMax和TG(φk_i_j,Dk_i_j)/TGMax分别实现对WG(φk_i_j,Dk_i_j)和TG(φk_i_j,Dk_i_j)的归一化;n Wk表示第k波次预警机总数;WE和WT分别表示实现巡逻区域覆盖时在归一化时间内的归一化价值。
预警机执行空中警戒任务是一个持续的动态过程,所以在进行巡逻策略规划时,不仅要考虑首波预警机的巡逻策略,还要考虑预警机的接班策略。通过分析指挥员的决策思路,可将预警机的巡逻策略规划分为“指定架次型”和“不指定架次型”两类。其中“指定架次型”巡逻策略规划可以理解为在首波预警机和轮换预警机架次均确定的情况下的巡逻策略规划问题。在这种情况下,巡逻策略规划的任务即是求解各架参与巡逻预警机的<φ,θ,d>的问题;“不指定架次型”巡逻策略规划可以理解为在确定可参与巡逻任务的预警机范围的情况下,针对首波预警机和轮换预警机的巡逻策略规划问题。在这种情况下,巡逻策略规划即是求解哪架预警机在哪一阶段以哪种策略<φ,θ,d>执行巡逻任务。
4.4.1 “指定架次型”巡逻策略规划
(1)策略建模
对于“指定架次型”巡逻策略规划,由于首波预警机和轮换预警机的架次已经分别确定,则可将针对所有预警机的巡逻策略规划过程分解为分别针对首波预警机和轮换预警机的两个独立的巡逻策略规划过程。以xi=<φi,θi,di>表示第i架预警机的巡逻策略,以X={xi,1≤i≤nWk}表示第k波次所有预警机的巡逻策略集合,以J(X)表示X对应的巡逻效能,表示为

式中,α,β≥0且α+β=1;WE(X)和WT(X)分别表示X对应的预警效果和威胁程度。
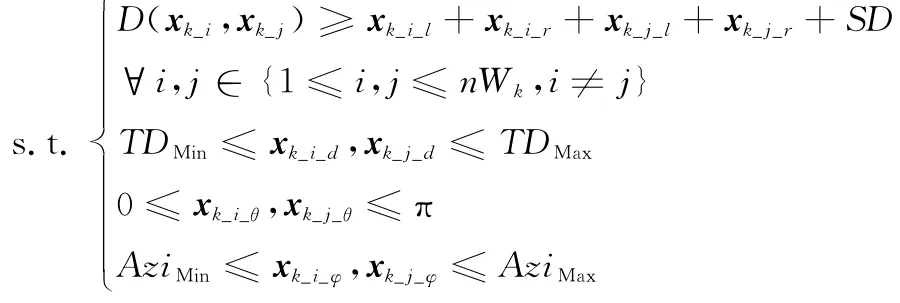
巡逻策略规划的目标是求解使得整体巡逻效能最大的一组巡逻策略X*[20],即

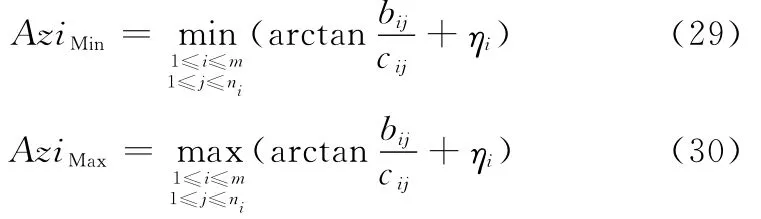
式中,D(xi,xj)表示第i架预警机和第j架预警机巡逻区域中心之间的距离;SD表示为了避免各架预警机在巡逻飞行过程中相互干扰,设定的各巡逻航线之间的最小距离;xi_d和xi_φ分别表示第i架预警机巡逻区域中心相对航母平台的距离和方位角;xi_θ表示第i架预警机的巡逻区域偏转角。AziMin和AziMax分别表示预警机巡逻区域方位角的最小值和最大值,表示为
(2)基于PGA的模型求解
遗传算法(genetic algorithm,GA)最初是由文献[21]提出,是一种借鉴生物界适者生存、优胜劣汰进化规律的高度并行的随机化搜索算法,本文采用遗传算法对模型进行求解。
①基本GA算法设计
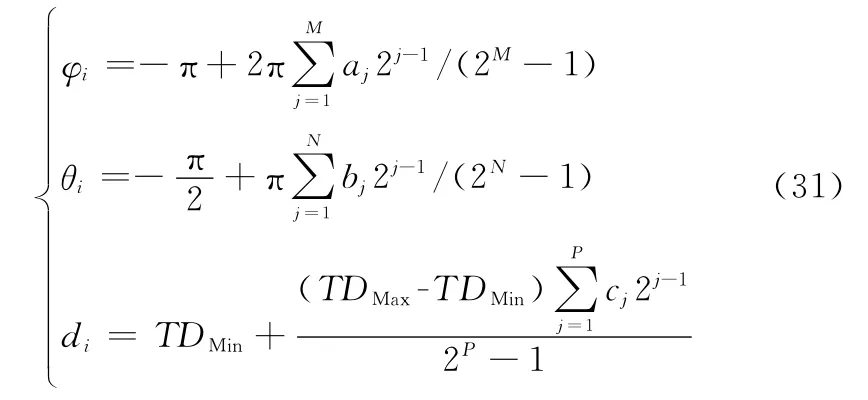
设计合理有效的编码方案是应用GA时必须解决的一个关键问题。针对所建立的“指定架次型”巡逻策略规划模型,采用二进制编码方式,xi可通过染色体=(ai1…aiMbi1

②适应度函数设计
适应度函数应该能够直接对候选解进行优劣评价,以引导种群的进化过程。在此,直接选择巡逻效能的评价函数式作为适应度函数。
在确定染色体的适应度计算方法之后,还必须设定种群的进化终止条件。为了尽量找到最佳巡逻策略,不设定最大进化代数,而是认为当种群连续UnIpvGntMax代未实现进化时搜索过程终止。进化与否的判断方法是

式中,IsImpvd(g)用于描述在第g代是否实现进化;J(X)g-1和J(X)g分别表示第g-1和g代最佳染色体所对应的适应度值;ε表示实现进化时相邻两代最佳染色体所对应适应度之间的差额下限。
③并行计算策略设计
传统GA算法在求解非线性优化问题上具备独特优势,但搜索空间较大时,计算效率偏低且易于陷入局部最优。因此,本文采用并行计算思路,提出一种新的主从式Master-Slave并行PGA算法。与文献[4-15]提出的单主多从(single-master-multi-slave,SM-MS)并行思路不同,本文提出了一种多主单从(multi-master-single-slave,MM-SS)并行模式,即通过多个Master种群和一个Slave种群实现并行进化。其中,Master种群不仅能够共享自身信息,而且可以访问其他种群信息,所以可以获取全局最优信息;Slave种群仅能对外发布自身信息;图4给出了由3个Master种群和1个Slave种群组成的PGA结构图。

图4 MM-SS模式PGA结构图
在图4中,Master1被设置为中心节点,各个种群独立进化并周期性地将自身的最优信息上报至中心节点,中心节点更新全局最优信息后将其分发给其他的Master节点,但并不向Slave节点分发该消息。在这样的交互机制下,各个Master节点不仅通过信息共享实现了种群的协同进化,加速了算法的收敛过程;同时,Slave节点的独立进化有效避免了整个进化过程在Master的诱导下陷入局部最优。
4.4.2 “不指定架次型”巡逻策略规划
“不指定架次型”巡逻策略规划与“指定架次型”巡逻策略规划的一个显著区别在于指挥员并未明确指定由哪一构成的预警机组在哪一波次执行巡逻任务。根据规划过程中是否考虑巡逻成本[22],可将“不指定架次型”巡逻策略规划划分为“不考虑成本不指定架次型”和“考虑成本不指定架次型”巡逻策略规划两类。其中,“不考虑成本不指定架次型”巡逻策略规划的目标是确定待命预警机集合中每架预警机的巡逻波次及巡逻策略,“考虑成本不指定架次型”巡逻策略规划的目标是确定待命预警机集合中实际参与巡逻任务预警机的架次、巡逻波次及巡逻策略。下面分别针对这两类规划模式展开研究。
(1)“不考虑成本不指定架次”巡逻策略规划
①策略建模
在进行该类巡逻规划时,不仅期望各波次的巡逻效能越大越好,而且期望各波次的巡逻效能尽量保持均衡,所以必须同时进行两个波次的巡逻规划,以X1和X2分别表示两个波次预警机巡逻策略集合,以J(X)表示整体巡逻效能,即

式中,J(X1)和J(X2)分别表示第1波次和第2波次的巡逻效能,可分别根据式计算得到;γ和ζ分别表示指挥员认定的两个波次巡逻效能之和与之差对于整体巡逻效能的贡献权重,满足γ,ζ≥0且γ+ζ=1。
巡逻策略规划的目标是求解使得整体巡逻效能最大的一组巡逻策略X*,即

步骤1 基本GA算法设计
针对所建立的“不考虑成本不指定架次型”巡逻策略规划模型,同样采用二进制编码方式,xi可通过染色体=(viai1…aiMbi1…biNci1…ciP)来表示,X可通过…;)来表示,其中M、N和P的含义与“指定架次型”巡逻策略规划部分相同,vi用于标识预警机的巡逻波次,具体含义为

步骤2 适应度函数设计
同样地,采用巡逻效能的评价函数式(33)作为适应度函数。对应的进化机制和进化终止条件与第4.4.1节相同,所以不再赘述。
(2)“考虑成本不指定架次”巡逻策略规划
①策略建模
该类巡逻策略规划与“不考虑成本不指定架次型”巡逻策略规划相同之处在于不仅期望各波次的巡逻效能越大越好,而且期望各波次的巡逻效能尽量保持均衡;不同之处在于同时期望整个巡逻策略所对应的巡逻成本越小越好。
以X1和X2分别表示两个波次预警机巡逻策略集合,以E1和E2分别表示参与两个波次巡逻任务的预警机集合,ET表示所有备选预警机集合,以UCost(X1+X2)表示参加两个波次巡逻的所有预警机的归一化代价,则

以J(X)表示整体巡逻效能

式中,γ、ζ和τ分别表示指挥员认定的两个波次巡逻效能之和与之差及归一化代价对于整体巡逻效能的贡献权重,满足γ,ζ,τ≥0且γ+ζ+τ=1。
巡逻策略规划的目标是求解使得整体巡逻效能最大的一组巡逻策略X*,即

对应的约束条件与式相同。
②基于PGA的模型求解
步骤1 基本GA算法设计
针对所建立的“考虑成本不指定架次型”巡逻策略规划模型,同样采用二进制编码方式,xi可通过染色体=

步骤2 适应度函数设计
同样地,采用巡逻效能的评价函数式(37)作为适应度函数。对应的进化机制和进化终止条件与第4.4.1节相同。
4.4.3 巡逻策略规划统一过程
图5描述了巡逻策略规划的统一过程。
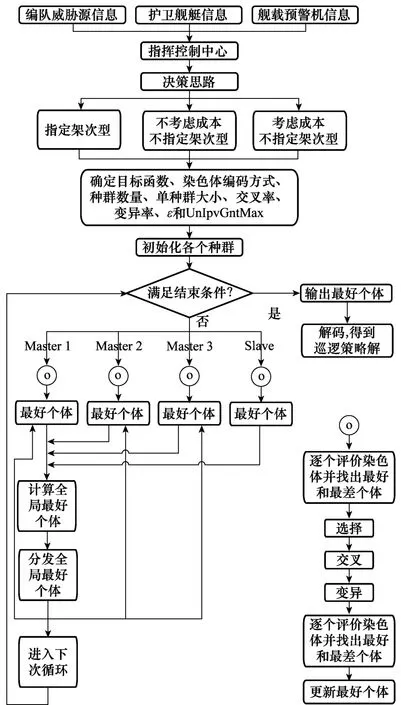
图5 巡逻策略规划统一过程示意图
5 仿真算例
以“指定架次型”巡逻策略规划为例,研究所提出巡逻策略规划模型的性质,以表1~表6为主要参数构建仿真想定。

表1 预警机参数列表

表2 攻击机参数列表

表3 航母编队指控中心决策参数列表

表4 决策权重列表
航母编队与机场的相对态势如图6所示。
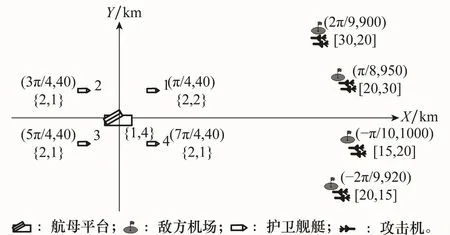
图6 航母编队与机场的相对态势图
图6中[i,j]表示该机场装备的第1、2类攻击机分别为i和j架,{i,j}表示该舰艇平台配置第i类舰载预警机j架(每架预警机巡逻时所配置基本护航编队中护航战斗机的数量和空战能力分别为2和1),(φ,d)表示该位置相对航母平台指定轴向的方位角和距离分别为φ(rad)和d(km)。
针对“指定架次型”巡逻策略规划,以航母平台上装备的单架固定翼预警机为指派对象,图7描述了基于文献[6]的解析结果和MM-SS的规划结果。
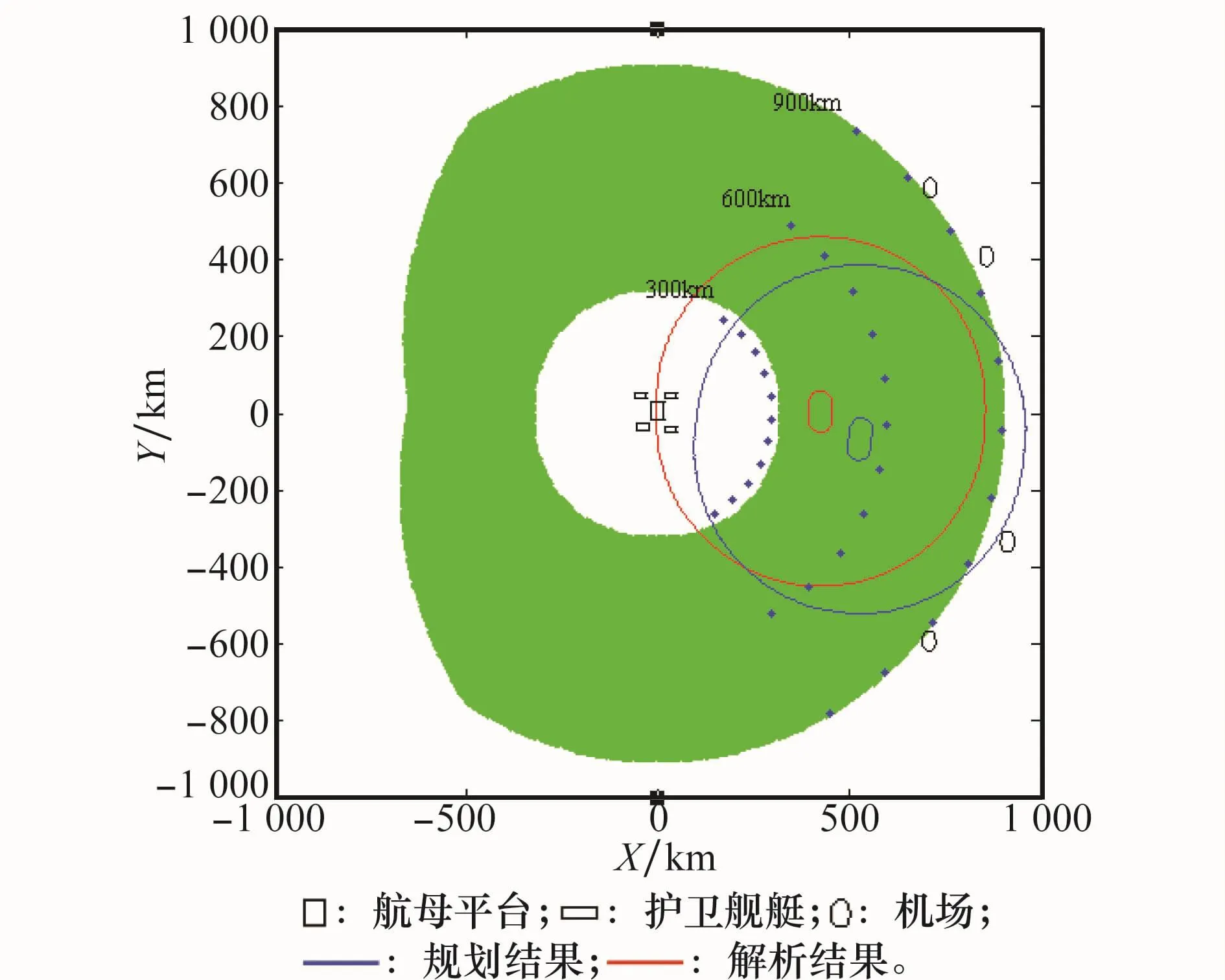
图7 规划结果示意图
在图7中,绿色区域代表拟定预警区域,红色小/大区域分别代表解析结果及其对应的预警区域,蓝色小/大区域分别代表规划结果及其对应的预警区域。解析结果为<0.739π/180,89.261π/180,428>,是基于预警机平台的自身安全需求确定的,所确定巡逻区域的中心位于“机场几何中心-航母平台”连线上且直线段与该连线垂直;规划结果为<-7.24π/180,82.86π/180,535>,是基于整个航母编队的预警需求确定的,其巡逻区域的中心与“机场几何中心-航母平台”连线无先验关系。
区别于现有的巡逻策略规划方法,本文所提出的“指定架次型”巡逻策略规划方法还支持多架同/异型预警机的巡逻策略规划,下面以航母平台上装备的单架固定翼预警机(编号为1)和护卫舰艇1上装备的单架预警直升机(编号为2)为指派对象,图8描述了基于MM-SS的规划结果,针对两架预警机的规划结果分别为<-21.10π/180,80.02π/180,545>和<23.07π/180,24.29π/180,425>。

图8 规划结果示意图
为了研究规划结果随(α,β)取值的变化趋势,增加对(α,β)取不同组合进行巡逻策略规划仿真,仿真结果如表7所示。

表7 规划结果对比表
综合图7和表7可以看出,巡逻区域与“机场几何中心-航母平台”连线无先验关系;巡逻区域直线段保持与“机场几何中心-航母平台”连线接近垂直;巡逻区域中心与航母之间距离随α增加越来越远,但仍小于设定的TDMax,规划结果相对解析结果可能为航母编队提供更长的预警时间,但预警机所受到的威胁程度也将增强,所以需要派遣战斗机进行护航。
同时,为了研究预警机巡逻策略规划结果随所配置护航战斗机数量及作战能力的变化趋势,增加对(Nst,BCAst)取不同组合进行巡逻策略规划仿真,仿真结果如表8所示。
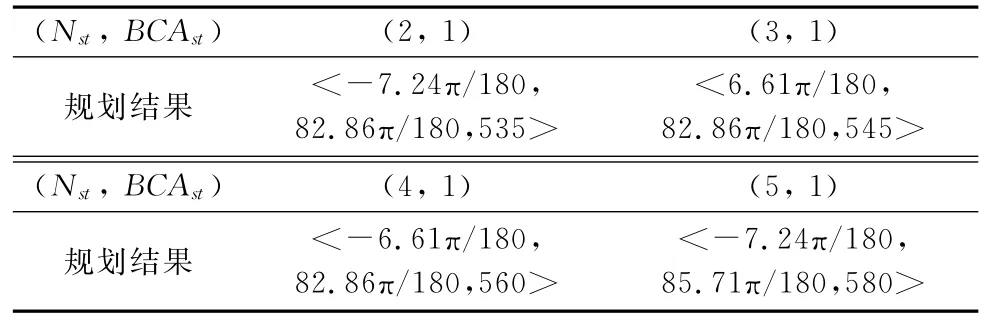
表8 规划结果对比表
从表8可以看出,随着针对预警机巡逻所配置护航战斗机的作战力量的增强,预警机可以执行更远的预警任务,达到更佳的预警效果。
为了分析本文所提出MM-SS的算法性能,以“指定架次型”巡逻策略规划为例,同时选择传统遗传算法(简称为TRAD)和SM-MS并行遗传算法进行对比,表9给出了分别采用3种算法时的模型求解耗时,图9对比反映了3种算法的进化趋势。

表9 算法运行时间表
通过表9可以看出,MM-SS和SM-MS的运算时间相当,均明显小于TRAD。这是因为,虽然基于两种并行遗传算法会产生额外的通信耗时,但每一代的进化耗时明显大于通信耗时,且各种群间的信息共享也加速了进化过程。为了不失一般性,给出(α,β)取不同组合时分别采用TRAD、SM-MS和MM-SS算法的规划过程运行时间对比图和巡逻效能对比图,如图10和图11所示。
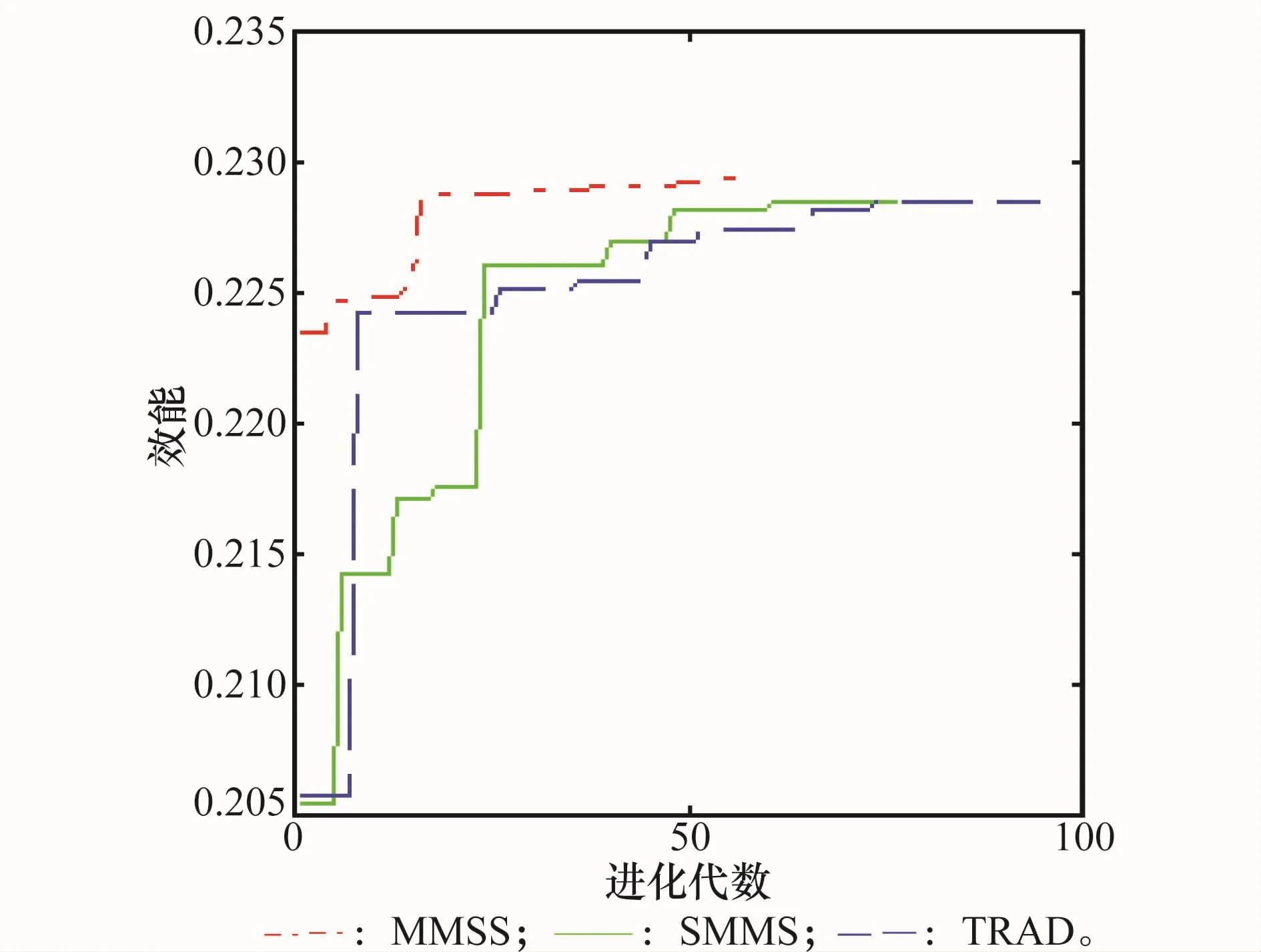
图9 3种算法的进化趋势图

图10 运行时间对比图
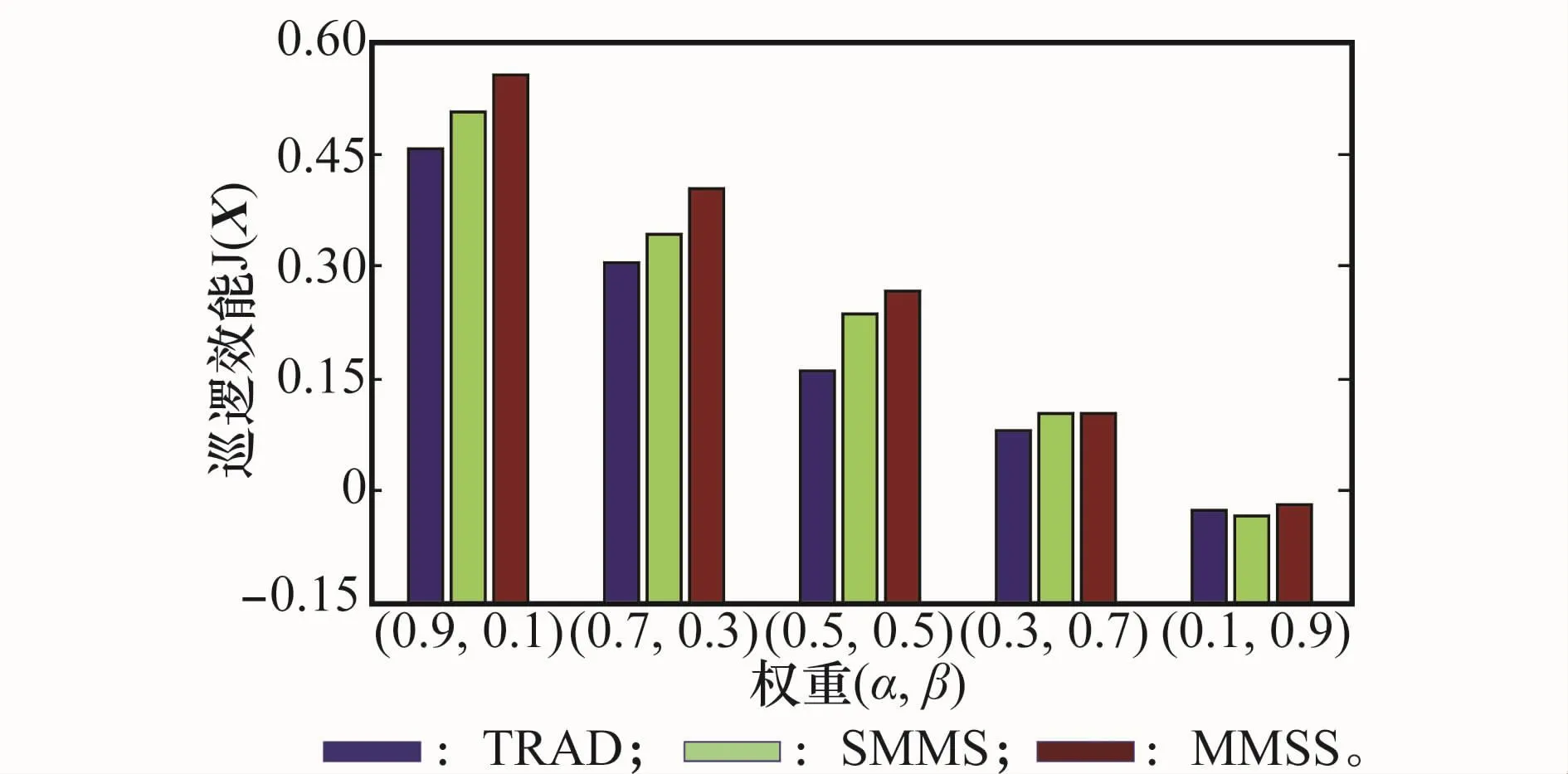
图11 巡逻效能对比图
结合图9~图11可以看出,MM-SS能够在相对更短时间内搜索得到具有更高巡逻效能的策略解,证明了算法的优越性。
6 结束语
本文首先对现有关于舰载预警机防空警戒规划研究进行分析,结合实际的防空警戒需求,提出了以“多威胁机场-多架异构异所属舰载预警机-动态接班巡逻”为背景的防空警戒巡逻规划研究目标。通过分析舰载预警机巡逻策略的生成流程,并以流程为主线,依次研究了敌方机场的作战能力及作战剖面、护航舰艇编队及舰载预警机的警戒区域。随后,以空域栅格为研究对象建立了相应的预警效果和威胁程度评价模型。紧接着,在之前研究的基础上,通过分析指挥员在进行巡逻规划时的决策思路,提出了“指定架次型”“不考虑成本不指定架次型”和“考虑成本不指定架次型”3种巡逻策略规划模型并针对各模型提出了MM-SS结构的多种群PGA模型求解方法。最后,以“指定架次型”巡逻策略规划为例进行仿真分析,证明了所提出模型和算法的有效性。
实质上,预警机巡逻策略不仅包括可由本文所提出的3种巡逻策略规划模型确定的巡逻波次、巡逻区域中心相对航母平台的距离、巡逻区域方位角和巡逻区域偏转角,还应包括预警机在巡逻区域的巡逻方向(顺时针或逆时针)及进入点等参数。在确定各架预警机的巡逻区域之后,还需要确定各架预警机在巡逻区域的巡逻方向及进入点等参数,以使得在各架预警机协同警戒的各个阶段(如正向和背向运动阶段)均具有较好的预警效果,这可作为下一步完善防空警戒控制策略研究的一个方向。
[1]Hopkins J.The cooperative engagement capability[J].APL Technical Digest,1995,16(4):377-396.
[2]Xu S L,Wang Z B,Wu X F.Research on the battle field of the early warning aircraft for the aircraft carrier formation in synthesis combat area[J].Ship Electronic Engineering,2008,28(1):41-44.(徐圣良,王振波,吴晓锋.航母编队进入综合作战区后预警机阵位研究[J].舰船电子工程,2008,28(1):41-44.)
[3]Huang J C,Chen S R,Cheng G Q.Modeling and analysis of air defense process for warship formation[J].Journal of National University of Defense Technology,2014,36(3):184-190.(黄金才,陈洒然,程光权.舰艇编队防空过程建模及分析[J].国防科技大学学报,2014,36(3):184-190.)
[4]Ciminera M V.Lineage of airborne early warning systems[C]∥Proc.of the AIAA Guidence,Navigation and Control Conference,2013:85-102.
[5]Yao X B,Zhao X Z.A research on using shipbased helicopters for providing air defence early warning for ship formation[J].Shipborne Weapons,2002,10(1):9-12.(姚晓白,赵晓哲.舰载直升机在舰艇编队对空预警中的使用研究[J].舰载武器,2002,10(1):9-12.)
[6]Shen Z S,Xia H C,Xu Y G.Research on the position deploying of early warning aircraft of aircraft carrier group in the battle on the sea[J].Ship Science and Technology,2011,33(7):115-118.(申战胜,夏惠诚,徐亚光.航母编队对海作战中预警机的阵位配置[J].舰船科学技术,2011,33(7):115-118.)
[7]Piao C R,Shen Z H.Disposition method of early warning helicopter for carrier formation in Air defense[J].Computer Simulation,2013,30(2):106-111.(朴成日,沈治河.航母编队对空防御中预警直升机空域配置方法[J].计算机仿真,2013,30(2):106-111.)
[8]Shen Z H,Piao C R.Disposition method of early warning aircraft in the air defense of the carrier formation[J].Command Control&Simulation,2012,34(6):14-17.(沈治河,朴成日.航母编队在对空防御中预警机空域配置的方法[J].挥控制与仿真,2012,34(6):14-17.)
[9]Wang G S,Li Q,Dai K X,et al.Blind compensation for multi-AWACS cooperation based on aerial defence and warning[J].Systems Engineering and Electronics,2012,34(5):941-946.(王国师,李强,代科学,等.基于防空警戒任务的多预警机协同补盲[J].系统工程与电子技术,2012,34(5):941-946.)
[10]Wang G S,Li Q,Qian Q F,et al.Deployment and optimization to multi-AWACSs under the active jamming condition[J].Infrared and Laser Engineering,2012,41(11):2973-2980.(王国师,李强,钱琼芬,等.有源干扰条件下多预警机空中部署及优化[J].红外与激光工程,2012,41(11):2973-2980.)
[11]Liang J,Liu M,Kui X.A survey of coverage problems in wireless sensor networks[J].Sensors&Transducers,2014,163(1):240-246.
[12]Fu Y N,Huang X J.Research on near space airship area covering deployment optimization problem[J].Fire Control& Command Control,2011,36(11):137-140.(负亚男,黄小军.临近空间浮空器区域覆盖布局优化问题[J].火力与指挥控制,2011,36(11):137-140.)
[13]Yang C G,Chen J,Tu X Y.Optimization of ground anti-aircraft weapon system networks based on direction probability and algorithm of improved marriage in honey bee optimization[J].Acta Armamentarii,2008,29(2):221-226.(杨晨光,陈杰,涂序彦.基于方向概率和改进蜂群算法的地面防空武器组网系统优化布阵[J].兵工学报,2008,29(2):221-226.)
[14]Chen Y,Feng Y,Li X Y.A parallel system for adaptive optics based on parallel mutation PSO algorithm[J].Optik-International Journal for Light and Electronic Optics,2014,125(1):329-332.
[15]Han F,Cui W,Wei G,et al.Application of parallel PSO algorithm to motion parameter estimation[C]∥Proc.of the 9th International Conference on Signal Processing,2008:2493-2496.
[16]Wang L Y,Dong Y F,Jiang Y Y.Synthesized index evaluation model for anti-ship combat capability of attack plane[J].Systems Engineering and Electronic,2007,29(5):771-773.(王礼沅,董彦非,江洋溢,等.攻击机反舰作战能力评估的综合指数模型[J].系统工程与电子技术,2007,29(5):771-773.)
[17]Xu S L,Wu X F,Zhao X L.Research on the position of early warning aircraft carrier formations in navigation[J].Command Control&Simulation,2007,29(1):57-60.(徐圣良,吴晓锋,赵小龙.航母编队航渡过程中预警机阵位确定方法研究[J].指挥控制与仿真,2007,29(1):57-60.)
[18]Fan H D,Ma X L,Ye W.Feiji dikong tufang hanglu guihua jishu[M].Beijing:National Defense Industry Press,2007:114 -120.(范洪达,马向玲,叶文.飞机低空突防航路规划技术[M].北京:国防工业出版社,2007:114-120.)
[19]Hsu P M,Lin C L,Yang M Y.On the complete coverage path planning for mobile robots[J].Journal of Intelligent&Robotic Systems,2014:74(3),945-963.
[20]Reza R,Nima E.Optimizing unprecedented maximal covering location problem with simulated annealing algorithm[C]∥Proc.of the International Conference on Business,Engineering and Industrial Application,2011,78-82.
[21]Holland J H.Adaptation in natural and artificial system[M].Michigan:University of Michigan Press,1975.
[22]Chen R G,Li C S,Chen J,et al.Optimization of near space aerocraft track for regional coverage based on greedy algorithm[J].Journal of Beijing University of Aeronautics and Astronautics, 2009,35(5):547-550.(陈荣光,李春升,陈杰,等.基于贪婪算法的近空间平台区域覆盖优化设计[J].北京航空航天大学学报,2009,35(5):547-550.)
Research on control strategy of EWA air defense alert within synthesis combat area
DUAN Xiao-wen,GAO Xiao-guang,LI Bo
(School of Electronic and Information,Northwestern Polytechnical University,Xi'an 710129,China)
The control strategy of early warning aircraft(EWA)assigned by carrier formation aimming at multi-target air defense alert within synthesis combat area is investigated.Firstly,the patrol program generation process of EWA is analysized.Then taking the process as the mainline,enemy combat capability and combat profile as well as the warning area of ship formation and EWA are studied.On this basis,taking the airspace grid as the unit,the corresponding evaluation method of warning effect and threaten degree are studied.Secondly,by analyzing the actual demand,three types of patrol strategy planning model available for warning tasking shifting,which is composed of“sorties specified type”,“cost unconsidered and sorties unspecified type”and“cost considered and sorties unspecified type”,and their corresponding parallel genetic algorithm of multi-master-single-slave structure are presented.Experiments show that the established model can realize the corresponding function of patrol strategy planning,and the proposed algorithm can solve the corresponding model efficiently.The validity of the model and algorithm is demonstrated.
carrier formation;early warning aircraft(EWA);air defense alert;synthesis combat area;parallel genetic algorithm(PGA)
E 837 文献标志码:A DOI:10.3969/j.issn.1001-506X.2015.09.13
段晓稳(1987-),男,博士研究生,主要研究方向为航空火力控制、编队作战指挥控制。
E-mail:xwduan2008@163.com
高晓光(1957 ),女,教授,博士,主要研究方向为航空电子系统、复杂军事系统的效能评估、空天火力控制。
E-mail:cxg2012@nwpu.edu.cn
李 波(1978 ),男,副教授,博士,主要研究方向为决策理论、航空武器系统作战效能分析。
E-mail:b0boo.lee@gmail.com
1001-506X(2015)09-2035-11
2014-09-15;
2015-03-25;网络优先出版日期:2015-04-28。
网络优先出版地址:http://www.cnki.net/kcms/detail/11.2422.TN.20150428.1647.001.html
国家自然科学基金(61305133);全国高校博士点基金(20116102110026);航天技术支撑基金资助课题
