分布式网络环境下系统跳变执行器故障诊断
2015-07-25程前帅乔殿峰侯彦东
程前帅, 乔殿峰, 侯彦东
分布式网络环境下系统跳变执行器故障诊断
程前帅,乔殿峰,侯彦东
(河南大学图像处理与模式识别研究所,河南开封475000)
针对存在输入干扰的分布式网络环境下系统跳变执行器故障问题,建立了连续时间马尔可夫跳变执行器故障系统模型,并设计了残差生成器.对于多系统网络传输下存在系统跳变的情况,首先在空间几何方法中的不可观测子空间以及空间分割投影运算基础上,运用H∞优化技术和线性矩阵不等式(LMI)方法完成残差生成器参数求解,实现残差对输入的解耦以及与故障的对应关系,并通过残差输出值与预设阈值对比来确定系统中的故障情形,最终完成分布式网络下系统跳变的执行器故障检测与隔离.通过仿真实验验证了算法的有效性.
分布式网络;故障检测与隔离;马尔可夫跳变;不可观测子空间
近年来,随着科技的不断发展,自动控制系统在社会发展的各个领域得到广泛应用,人类对自动控制系统的依赖程度也越来越高.但在实际应用中,由于控制系统规模越来越大,复杂性也在不断提高,再加上系统花费巨大,对系统运行的安全性和可靠性提出了更高要求.一旦系统发生故障,若不能及时排除,容易给人们生活带来难以估量的损失,因此系统的安全运行必须引起高度重视.
为保证系统安全运行,最为重要的就是要解决系统故障诊断问题.文献[2]中对离散马尔可夫跳变系统下的故障诊断和隔离问题进行了研究,设计了一个基于H∞的故障检测与隔离算法,实现了对多模态网络中不完善通信信道的故障检测与隔离.文献[3]中针对存在时延的网络控制系统,设计了具有鲁棒性的故障检测滤波器.其中,利用多速率采样方法和增广矩阵法,将随机长时延网络控制系统建模为马尔可夫跳变系统,并在此系统基础上建立基于H∞的故障检测滤波器.文献[4]中通过对无人设备网络下故障诊断和隔离问题的研究,发现在无人设备网络下执行器的故障信号是相关的,而且可以将该网络看作一个过驱动系统,由此设计出一个新的结构化残差集实现对线性系统多种故障的检测与隔离.文献[5]中针对非线性系统提出了一个基于非线性系统混合模型的故障诊断和隔离体系,利用状态空间方法和非线性参数神经网络对未知故障进行识别.文献[6]中考虑在控制器有多种故障的情况下,多输入多输出非线性系统的故障容错控制问题,通过对状态反馈故障诊断和隔离的滤波器、控制器以及状态估计器的组合,设计出输出反馈故障诊断和隔离的滤波器和输出反馈控制器.故障诊断和隔离滤波器主要用于获取系统无错估计和真实值之间的差别,从而对控制器上的故障实现检测与隔离.文献[7]中考虑了卡死、增益时变和偏差时变3种典型的传感器故障模型,利用结构化残差集,设计残差产生器,运用不变子空间理论,实现了传感器故障的检测与隔离,但未考虑输入干扰的情况.在文献[8]中,对一类存在时延的离散马尔可夫跳变系统,设计一个鲁棒的故障识别滤波器,同时研究了基于H∞优化技术的范数有界不确定性,此方法产生的残差信号是故障信号的估计,然而对马尔可夫跳变系统的故障隔离问题尚未完全解决.
本文以分布式网络中存在系统跳变情况下的执行器故障问题,建立了连续时间马尔可夫跳变系统,介绍了空间几何方法下的不可观测子空间的概念以及如何构造包含给定子空间的最小不可观测子空间的算法,设计马尔可夫跳变残差生成器,利用H∞优化技术和线性矩阵不等式(Linear Matrix Inequality,LMI)方法求解残差生成器相关参数,由此生成残差与其分布式系统故障情况对应,即由残差输入值和故障集的解耦关系实现系统的故障检测与隔离.
1 执行器故障建模
考虑分布式网络中存在系统跳变的问题,建立连续时间马尔可夫跳变系统如下:
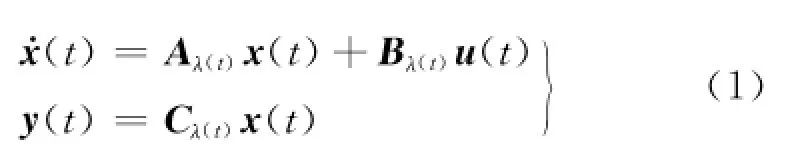
式中:x∈Rn是系统状态变量;u∈Rm、y∈Rq分别为系统正常情况时的输入和输出信号;A∈Rn×n为系统矩阵;B∈Rn×m为输入矩阵;C∈Rq×n为输出矩阵.{λ(t),t≥0}是连续时间不可约马尔可夫过程,在有限集α={1,2,…,N}中取值.
当系统执行器发生故障,并且伴有未知量测干扰的系统方程为:
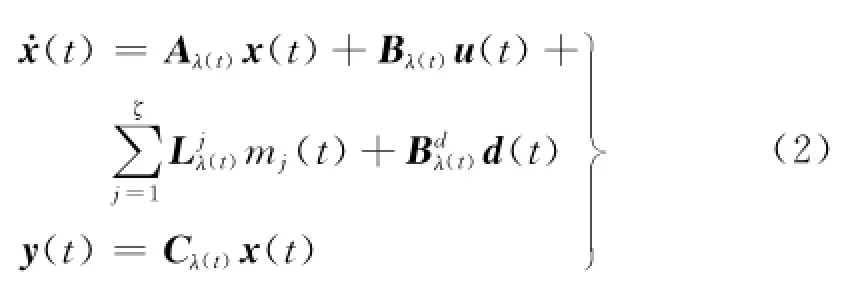
式中:d∈Rp为未知干扰输入;为输入干扰矩阵;mj表示故障模型;L jλ(t)表示mj对应的故障特征.
马尔可夫过程描述的是不同系统模型之间的转换,并且其转变取决于下面的概率转换:

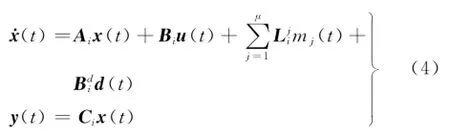
系统式(2)可记为:
在形式上把结构化故障检测与隔离问题(Structured Fault Detection and Isolation Problem,SFDIP)定义为动态残差生成器,并且使得可观测的u(t)和y(t)作为输入并产生一组残差信号rl(t)(l∈p={1,2,…,p}),且具有以下性质:
(1)当系统无故障发生时,所有的残差rl(t)都趋近于零.
(2)当第j个组件发生故障时,对应的残差rl(t)(l∈Ωj)对这个故障敏感,而其余的残差rα(t)(α∈p-Ωj)对该故障不敏感.
对于一个预先设定的编码集Ωjp,j∈,必须知道rl(t)哪个为零,哪个不为零,使得编码集可以唯一地确定故障.基于几何方法是解决SFDIP问题的一个十分有效的方法.
2 连续时间马尔可夫跳变系统故障检测与隔离
2.1不变子空间和不可观测子空间
在形式上给出马尔可夫跳变系统中不可观测子空间的概念,首先对一类α={1,2,…,M}给出不变子空间的定义.
定义1[9]对于所有的(A,C,Π且i∈α,如果满足AiWα(∩KerC)iWα,则称子空间Wα为(A,C,)Π不变子空间.显然,若i∈α,则(A,C,)Π中的子空间Wα也为Ci,(Ai)不变子空间.
存在映射Di:Rq→Rn,使得Ai+Di(CiWαWα,i∈α).使Γ为表示一类λ(t)的集合范围为{1,2,…,M},当满足AiWΓ∩KerC(iWΓ,i∈l),l∈Γ,则WΓ为关于Γ的不变子空间.
算法1[10]求解子空间的步骤为:
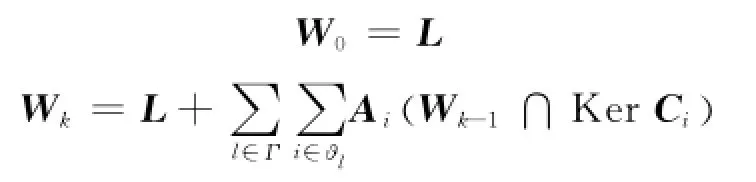
当满足Wk=Wk+1时,可得不变子空间=Wk.
定义2[9]对于所有的(A,C,Π)且i∈α,如果存在输出映射Di:Rq→Rn和测量混合映射Hi:Rq→Rq使得
则称子空间Sα为Ci,(Ai)不可观测子空间.
算法2[10]求解子空间的步骤如下:
当满足Zμ+1=Zμ时,可得不可观测子空间=Zμ.
结构化故障检测和隔离问题的可行解条件如下.
定理1[10]在连续时间马尔可夫跳变系统中,结构化故障检测和隔离问题具有可行解的条件为:当且仅当存在

式中

以下定理给出了H∞结构化故障检测与隔离问题具有可行解的充分条件.
定理2[10]在连续时间马尔可夫跳变系统中,如果满足

H∞结构化故障检测和隔离问题存在可行解.式中:∩.
根据定理1、2可使故障相互之间都存在只属于本身的特性,实现故障特征之间的解耦关系,使得故障可以被独立地表达出.
2.2马尔可夫跳变残差产生器设计
通过连续时间马尔可夫跳变系统中不可观测子空间的概念,马尔可夫跳变系统式(4)的结构化故障检测与隔离问题可定义为:基于编码集Ωj,j∈1,2,…,ζ,生成p个残差信号rl(t),l∈p= 1,2,…,p.为得到与故障情况对应的残差输出值,首先设计马尔可夫跳变残差生成器:
残差rl(t),l∈Ωj对于第n个器件出现故障的情况敏感,其余的残差rρ(t),ρ∈p-Ωj对此故障不敏感.
假设λ(k)=i∈α,则式(8)可记为:

2.3残差产生器参数求解
为得到均方稳定的残差生成器,设置
式中,Gli可由以下定义的线性矩阵不等式确定

以上设计的残差生成器,没有考虑干扰信号 d(t),下面设计含有干扰的马尔可夫跳变系统检测 残差产生器,即基于编码集Ωj,j∈{1,2,…,ζ},设 计出一组检测残差产生器,产生残差rj(t)满足
j
式中,γ>0是扰动衰减的正常水平.
存在矩阵T li、G li和正定矩阵R li,i∈α,l∈p满足
2.4执行器故障检测与隔离实现
为实现故障仅有特定的残差表示,即实现故障与残差之间的完全对应关系.首先定义误差

根据式(4)和(9)则有

由此可得
两次动态的。一次是4月22日由伏尔加格勒驱车南行约90余公里到伏尔加格勒州与卡尔梅克共和国交界处,在伏尔加格勒州和卡尔梅克共和国两处很有特色的地标前稍做停留、照相后即进入卡尔梅克共和国境界,其时汽车奔驰在辽阔的卡尔梅克大草原,除了激动,还有期待!

取d(t)为高斯白噪声,由式(13)可知,残差与输入解耦,残差rl受到故障ml的影响,而与其他故障无影响,从而实现对系统进行故障检测与隔离.
3 仿真结果与分析
考虑马尔可夫跳变系统式(4):
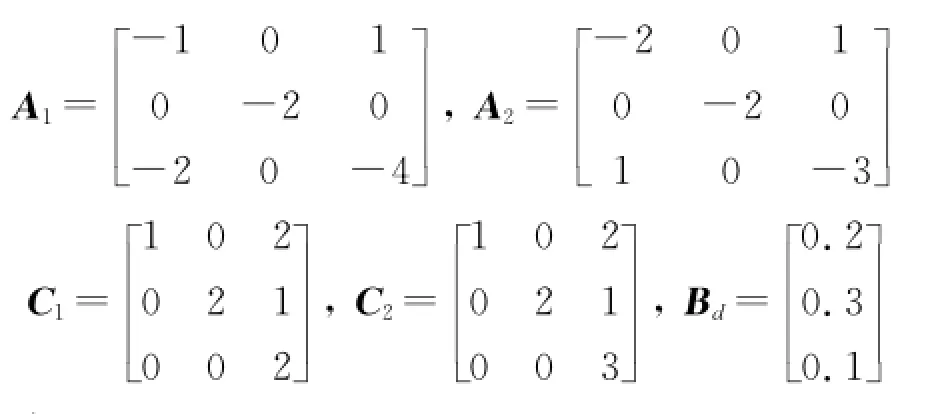
其中,N=2,i=1,2,γ=0.1,B=0.
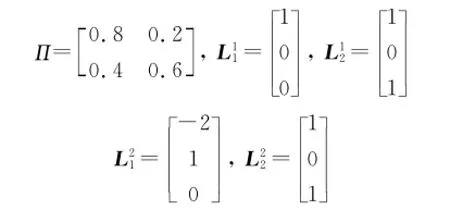
模型的转移矩阵和故障特征为:
根据算法求解各项参数,步骤如下:
(1)利用算法2可知,不可观测子空间Si=,可得
(2)由PlSl=0可得投影算子

(3)解方程Pl(Ai+D l0iCi)Si=0,解得输出映射
(4)通过方程Ker H liCi=Sl+Ker Ci,可得混合映射

(5)通过解方程MliPl=HliCi,解得

(6)由
得到诱导映射
(7)通过解线性矩阵不等式(12),得

(8)然后由
可得
(9)由式(9),得到残差r1、r2.
为了可以准确地检测到由残差值对应的故障的发生,选取有效的残差阈值ε=±0.3,若无残差值超过阈值,说明无故障发生;当残差值超过阈值,即说明有故障发生.通过残差值与故障的对应关系,可准确地检测到哪个执行器发生故障.
在含有输入干扰的分布式网络控制系统中,用马尔可夫跳变残差产生器来检测执行器故障.在50 s时刻给系统执行器突发故障m1,r1发生跳变,r2未发生跳变(见图1),说明本文所提算法可以检测和隔离故障m1;在50 s时刻给系统执行器突发故障m2,r1未发生跳变,r2发生跳变(见图2),说明本文所提算法可以检测和隔离故障m2;在50 s时刻同时给系统执行器突发故障m1和m2,r1和r2均发生跳变(见图3),说明在含有输入干扰的分布式网络控制系统中,当系统执行器同时发生多种故障时,本文所提算法可以对其进行有效地检测与隔离;当系统正常运行时,r1和r2均未超过阈值(见图4),表明无故障产生.
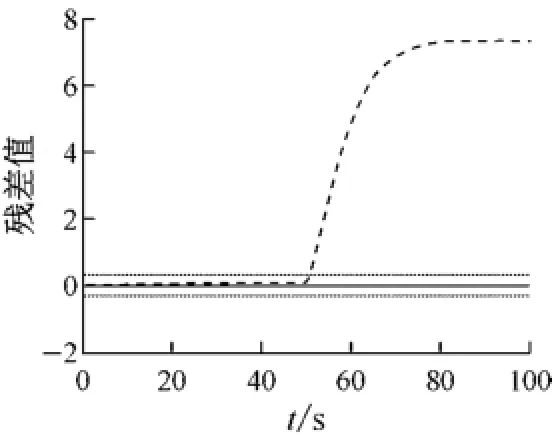
图1 1号执行器发生故障Fig.1 A fault occurs in the No.1 actuator
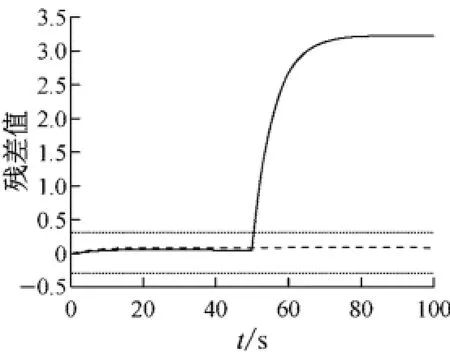
图2 2号执行器发生故障Fig.2 A fault occurs in the No.2 actuator
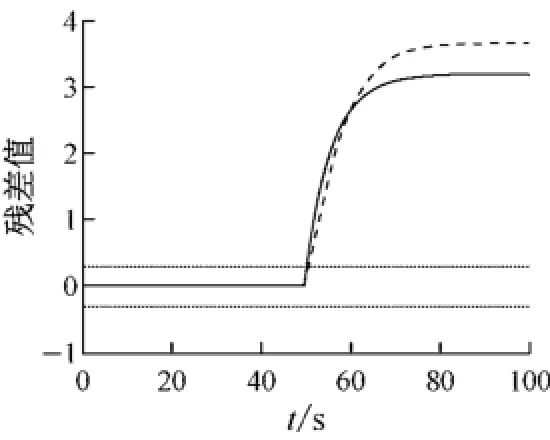
图3 1、2号执行器同时发生故障Fig.3 Faults take place meanwhile in No.1 and No.2 actuators
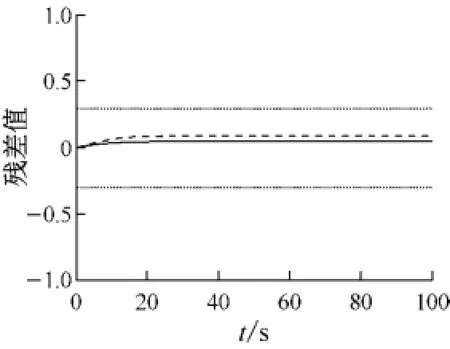
图4 无执行器发生故障Fig.4 No faults occur in any actuators
由图1~4可知,当系统含有输入干扰的情况下,残差rl只受到故障ml的影响,而与其他故障无关,从而实现故障检测与隔离,充分说明了本文所提算法的有效性.
4 结 语
本文针对存在输入干扰的分布式网络控制系统,建立马尔可夫跳变系统模型.当执行器发生故障时,利用线性系统理论,构造适合的马尔可夫跳变残差产生器对系统进行故障诊断,使得每个残差信号只受到一个故障的影响,与其他的故障解耦,此时,在未知输入干扰和残差信号之间的转移函数的H∞范数小于一个给定的正值;在存在随机输入干扰的情况下,通过空间投影运算,实现系统对输入的完全解耦.仿真结果表明,该方法实现了对分布式网络控制系统的执行器故障的检测与隔离.因此,本文所提方法不仅具有较强的理论意义,而且具有很好的实用价值.
[1]周东华,叶银忠.现代故障诊断与容错控制[M].北京:清华大学出版社,2000.
[2]Yao X,Wu L,Zheng W X.Fault detection filter design for Markovian jump singular systems with intermittent measurements[J].IEEE Transactions on Signal Processing,2011,59(7):3099-3109.
[3]Mao Z,Jiang B,Shi P.H∞fault detection filter design for networked control systems modelled by discrete Markovian jump systems[J].Control Theory& Applications,IET,2007,1(5):1336-1343.
[4]Meskin N,Khorasani K.Actuator fault detection and isolation for a network of unmanned vehicles[J]. IEEE Transactions on Automatic Control,2009,54 (4):835-840.
[5]Talebi H A,Patel R V,Khorasani K.Fault detection and isolation for uncertain nonlinear systems with application to a satellite reaction wheel actuator[C]//IEEE International Conference on Systems,Man and Cybernetics.Montreal,Que:IEEE,2007:3140-3145.
[6]Mhaskar P,McFall C,Gani A,et al.Fault-tolerant control of nonlinear systems:fault-detection and iso-
[7]侯彦东,文成林,陈志国.多传感器故障检测与隔离的残差产生器设计方法研究[J].电子学报,2011,39(2):429-434.
[8]Wang H,Wang C,Gao H,et al.An LMI approach to fault detection and isolation filter design for Markovian jump system with mode-dependent time-delays [C]//Proceedings of the 2006 American Control Conference.Minneapolis,MN:IEEE,2006:5686-5691.
[9]Meskin N,Khorasani K.A geometric approach to fault detection and isolation of continuous-time Markovian jump linear systems[J].IEEE Transactions on Automatic Control,2010,55(6):1343-1357.
[10]Meskin N,Khorasani K,Rabbath C A.Fault diagnosis in a network of unmanned aerial vehicles with imperfect communication channels[C]//AIAA Guidance,Navigation,and Control Conference.Chicago:AIAA,2009.
[11]Marro G.The geometric approach toolbox[EB/OL]. ITALY:Universitàdi Bologna,2007[2015-01-10]. http://www3.deis.unibo.it/Staff/FullProf/GiovanniMarro/geometric.htm.IEEE,2008:4355-4360.
(编辑俞红卫)
Actuator Fault Diagnosis for System Jumping under Distributed Network Circumstance
CHENG Qianshuai,QIAO Dianfeng,HOU Yandong
(Institute of Image Processing and Pattern Recognition,Henan University,Kaifeng 475000,Henan,China)
To solve the problem of system jumping actuator fault problems under the environment of distributed network,the continuous-time Markov jump system with actuator fault was molded and the residual generator was designed.In view of the case of system jumping under the multi-systems network transmission,and based on the unobservability subspace and space division projective operation of space geometry approach,the filter parameters were obtained by utilizing the H∞optimization technique and linear matrix inequality(LMI)method.As a result,the inputs were decoupled from residuals and the relationships between residuals and faults were correlated.Furthermore,by comparing and analyzing the residual inputs and preset thresholds,the actuator faults were determined,by which the problem of system jumping actuator faults detection and isolation in the distributed network was addressed. Simulation results demonstrated the effectiveness of the proposed method.
distributed network;fault detection and isolation;Markovian jump;unobservability subspace
TP 273.5
A
1671-7333(2015)03-0248-06
10.3969/j.issn.1671-7333.2015.03.008
2015-01-16
国家自然科学基金资助项目(61374134,U1204611)
程前帅(1989-),男,硕士生,主要研究方向为故障诊断.E-mail:hndxcqs@163.com
侯彦东(1971-),男,副教授,博士,硕士生导师,主要研究方向为故障诊断与容错控制、系统安全监测与可靠性评估. E-mail:hydong@henu.edu.cn
