基于MRAS观测器的PMSM无速度传感器模型预测电流控制
2015-07-23柏建勇刘雨佳济南铁路局青岛电务段山东青岛266000
柏建勇,刘雨佳(济南铁路局青岛电务段,山东青岛266000)
基于MRAS观测器的PMSM无速度传感器模型预测电流控制
柏建勇,刘雨佳
(济南铁路局青岛电务段,山东青岛266000)
针对永磁同步电机无速度传感器控制系统中定子电阻随温升发生变化的问题,提出了基于定子电阻在线辨识的模型参考自适应观测器。该观测器不仅准确估计出转速,而且在线跟踪辨识定子电阻,降低了定子电阻对模型参考自适应观测器的影响;将辨识出的定子电阻用于电流预测模型当中,提高了模型预测电流控制器的控制精度。经仿真实验验证,基于模型参考自适应观测器的永磁同步电机无速度传感器模型预测电流控制系统具有较好的动静态性能和较强的鲁棒性。
永磁同步电机;无速度传感器;模型参考自适应;模型预测电流控制
0 引言
随着科技的迅猛发展,电机在各个领域被应用的越来越广泛,如:交通工具、工业生产和航空航天等。而永磁同步电机(Permanent M agnet Synchronous Motor,PMSM)因具有体积小、可靠性高、转矩惯量比高和功率密度高的优点而被广泛的应用到诸多领域。
为了提高电机驱动系统的控制性能,多年来相关科研领域已经提出了多种控制策略,其中以矢量控制和直接转矩控制两种控制策略最经典。矢量控制[1-2]是1971年由德国西门子公司的F. B laschke提出的,基本思想是通过矢量变换,把三相交流电动机的定子电流分解成转矩电流分量和励磁电流分量,使得这两个分量相互垂直,然后分别对其调节,从而得到如同直流电动机一样好的动态特性。直接转矩控制[3-4]是上世纪80年代由德国学者Depenbrock提出的,基本思想是通过对定子磁链定向的方法,直接对电机的定子磁链、转矩与其给定值进行比较,并通过磁链、转矩控制器选择相应的定子电压空间矢量来控制电机,结构简单,但是转矩、磁链脉动比较大。
近年来模型预测控制[5-10]也被诸多学者应用到电机驱动系统当中。本文采用模型预测电流控制(Model Predictive Current Control,MPCC)策略,该方法是基于交直轴电流建立最小化模型。其基本思想是利用电机的数学模型预测变量未来的状态,在每一个采样周期内选择能使成本函数最小的矢量电压所对应的开关信号作为本周期的控制信号,算法比较简单。
为保证系统的控制性能需要对PMSM转速进行闭环控制,而速度传感器不仅增加了电机的成本、体积,而且降低了系统的可靠性,为此,近年来无传感器控制一直都是该领域的研究热点。针对无传感器控制国内外学者提出了诸多方法,比如高频注入法[11]、卡尔曼法[12]、滑模变结构法[13-14]和模型参考自适应(M odel Reference Adaptive System,MRAS)法[15]等。
MRAS方法对PMSM参数依赖性较强,为此本文采用MRAS不仅辨识转速,而且在线辨识定子电阻。同时辨识出的定子电阻应用到预测电流模型中,提高了MPCC器的控制精度。
1 永磁同步电机数学模型
PMSM同步旋转坐标系下的动态模型如下:

式中id,iq为dq轴定子电流;ud,uq为dq轴定子电压;Ld,Lq为dq轴电感;Rs为定子电阻;p为极对数;ωr为机械角速度;ψm为永磁磁通。
2 MRAS观测器的PMSM无传感器模型预测电流控制
本文基于MRAS观测器的PMSM无传感器模型预测电流控制系统主要包括PI控制器、模型预测电流控制器、MRAS观测器和功率单元,其中电机选择表面式PMSM。如图1所示为MRAS观测器的PMSM无传感器模型预测电流控制系统框图,如图2所示为MRAS观测器结构框图。
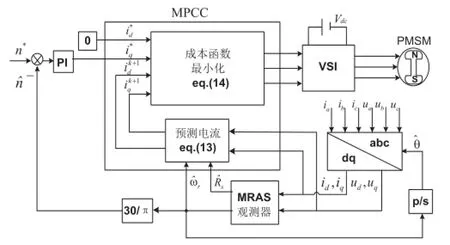
图1 无传感器模型预测电流控制系统框图Fig.1 Block diagram of sensorless MPCC system
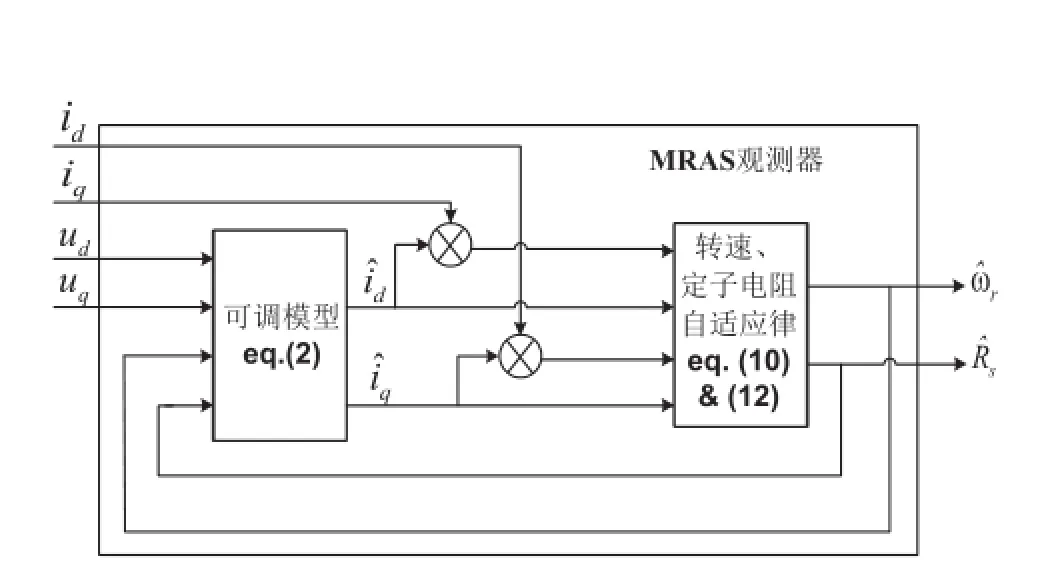
图2 MRAS观测器结构框图Fig.2 Structure diagram of MRAS observer
在该控制系统中,首先利用传感器检测三相电机驱动系统的电流和电压,然后利用MRAS观测器估计电机转速和定子电阻,节省了速度传感器,降低了系统的成本,增加了系统的可靠性。控制器采用模型预测电流控制的方法,在每个采样周期,通过评价每个电压矢量的效果,从中选出最小成本函数所对应的电压矢量作为逆变器的输出控制电压矢量。
2.1MRAS观测器的设计
将永磁同步电机定子电流方程式(1)作为可调模型,电机本体作为参考模型,利用模型参考自适应的方法设计速度观测器,设计过程如下:
由表面式PMSM知,Ld= Lq= L。速度、dq轴定子电流和定子电阻误差分别定义如下:

可调模型:

由式(2)-(1)得:

构造Lyapunov函数:
对式(4)求导得:

这里我们假设

此时

由Lyapunov稳定性理论可知,所设计的MRAS观测器系统渐进稳定,且有:

由式(6)得:

由于电气常数远小于机械常数,所以电机定子电流变化的反应时间远远快于转速变化的反应时间,故可以假设
此时有
因此,得到转速自适应律为:


由式(7)得:因此,得到定子电阻自适应律为:

2.2模型预测电流控制器的设计
由式(1)离散化得到预测电流:

成本函数定义如下:

式(14)中a是权重因子,id*,iq*分别是d轴和q轴的电流参考值,idk+1,iqk+1分别是d轴和q轴的电流预测值,V0、V1、…、V7是逆变器8种开关状态所对应的电压矢量。每个控制周期分别计算8种电压所对应成本函数F,选择使成本函数最小化对应的开关状态作为此控制周期逆变器的开关状态,优化过程如图3所示,其中x为交直轴电流响应,Ts为采样时间。这里假设在t(k)时刻的最优值为x(t(k)),那么在t(k+1)时刻分别计算8种矢量电压所对应的x(t(k+1)),与x*最相近的xp4(t(k+1))即为t(k+1)时刻的最优值,选择该最优值所对应的电压矢量V4作为t(k+1)时刻的控制信号。同理,在t(k+2)时刻选择V3作为该时刻的控制信号。算法流程如图4所示。

图3 优化过程Fig.3 Optimization process
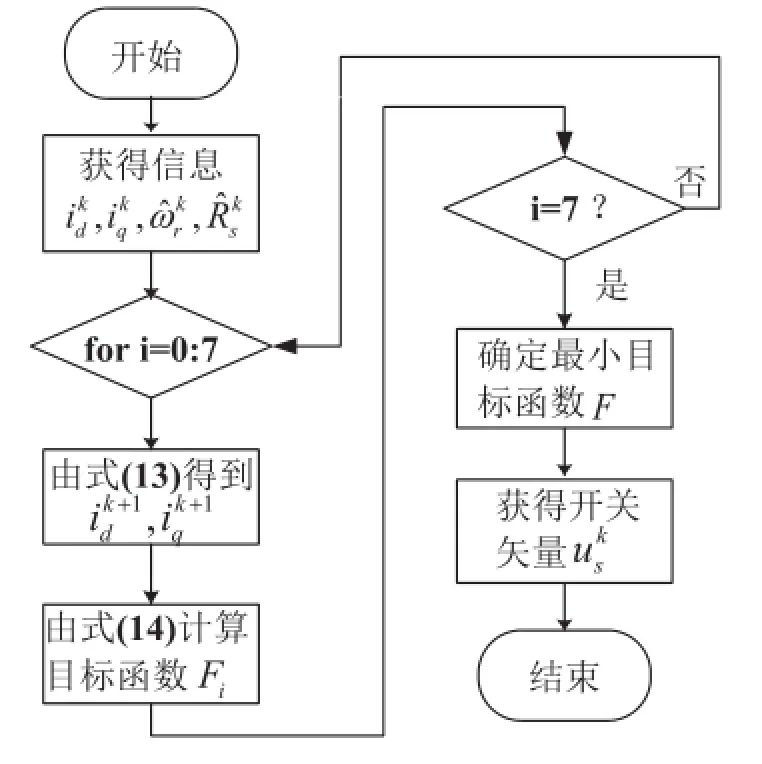
图4 模型预测算法流程图Fig.4 Model predictive generic algorithm
3 仿真分析
为验证所设计MRAS观测器对速度和定子电阻同时在线辨识的可行性,采用Matlab/Simulink软件搭建无速度传感器模型预测电流控制系统仿真模型,仿真模型如图5所示,电机参数如表1。
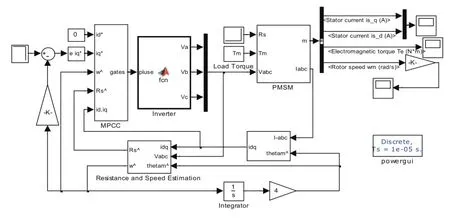
图5 无速度传感器模型预测电流控制系统仿真模型Fig.5 Simu lation model of sensorless MPCC system
系统启动为空载启动,在t=0.1s时加入负载2N·m;给定起始速度为1000r/m in,在t=2s时,转速降为800r/m in;给定初始定子电阻为2.875Ω,在t=1s时增加到3.5Ω。仿真过程中无速度传感器模型预测电流控制系统仿真参数的选取:
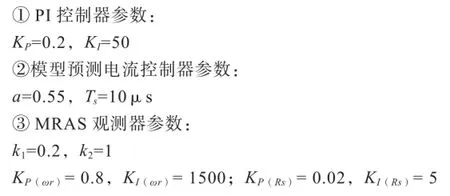
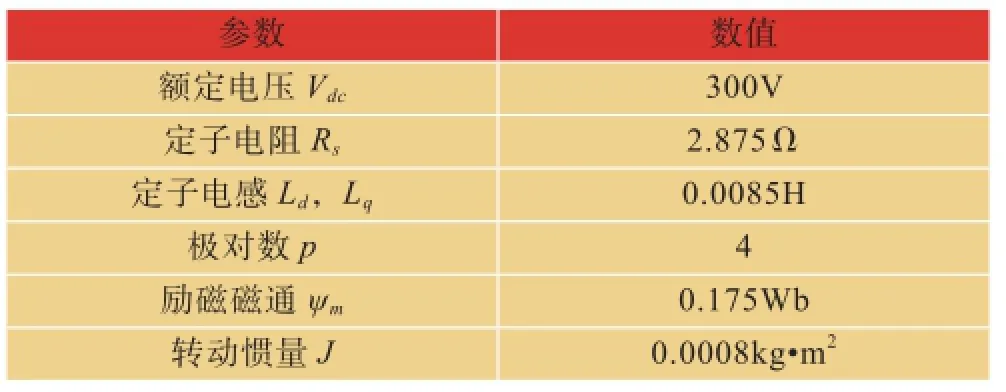
表1 PMSM的参数Tab.1 Parame ters of PMSM
图6是由MRAS观测器得到的速度估计值。从局部放大图可能看到,在t=1s定子电阻发生变化时,由M RAS观测器得到的转速有一定的抖动,但是能迅速恢复。
图7是有速度传感器系统和无速度传感器系统实际测量速度对比图。从图中可以看出,所设计的观测器能够准确估计出速度,从而验证了所设计观测器的有效性。
图8 是由MRAS观测器辨识出的定子电阻与给定值的对比。在t=1s定子电阻变化时,观测器仍能准确辨识;在t=2s转速变化时,辨识的定子电阻虽有抖动,但能迅速恢复其原值。
图9、图10分别是PMSM无传感器模型预测电流控制系统的转矩响应和交直轴电流响应。
仿真结果表明,本文所设计的MRAS观测器不仅能够准确辨识出转速信息,同时能够辨识出定子电阻,从而为预测电流的精确计算提供了保证,验证了所设计观测器的可行性和有效性。
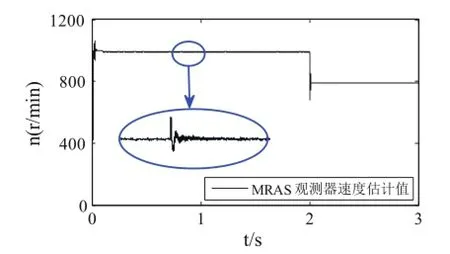
图6 MRAS观测器估计速度Fig.6 Estimated speed of MRAS observer
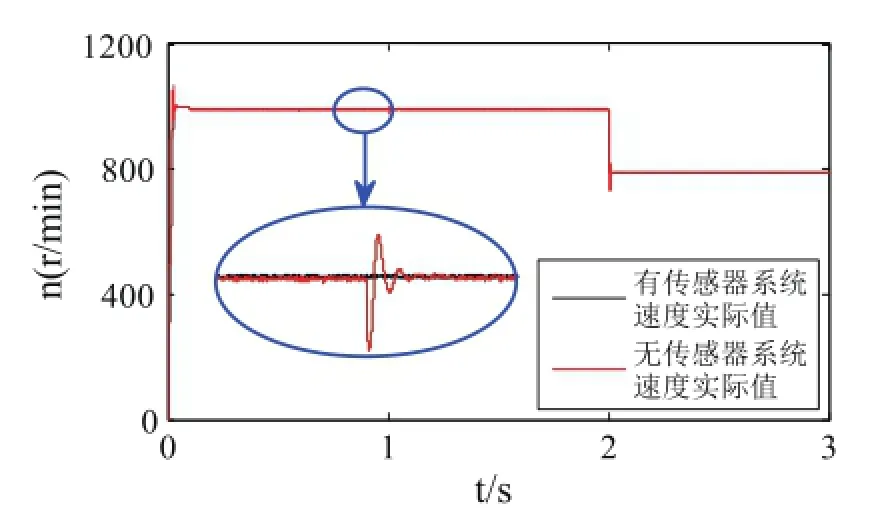
图7 有传感器系统和无传感器系统实际速度Fig.7 Actual speed of sensor system and sensorless system
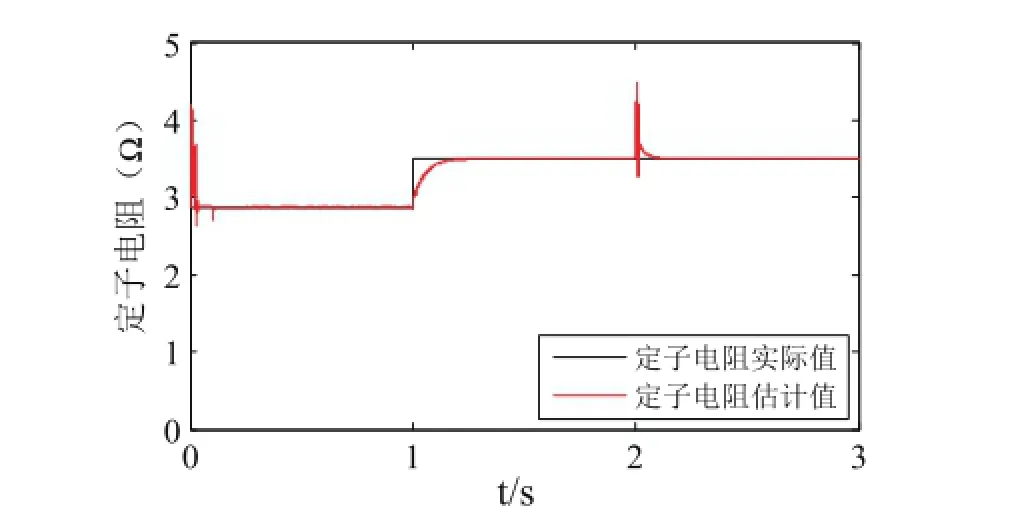
图8 MRAS观测器定子电阻辨识Fig.8 Stator resistance identification of MRAS observer
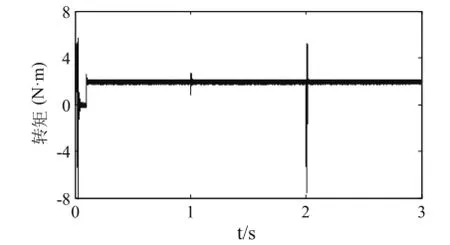
图9 无传感器控制系统转矩响应Fig.9 Torque response of sensorless contro l system
4 结论
针对永磁同步电机,本文基于MRAS观测器设计了无速度传感器模型预测电流控制系统。在理论分析的基础上进行了仿真分析,仿真结果表明本文所设计的MRAS观测器不仅能准确估计出PMSM的转速,而且能够在线辨识出定子电阻,从而为预测电流的计算提供了保证。转速的精确估计提高了系统的可靠性,降低了产品的成本和体积。
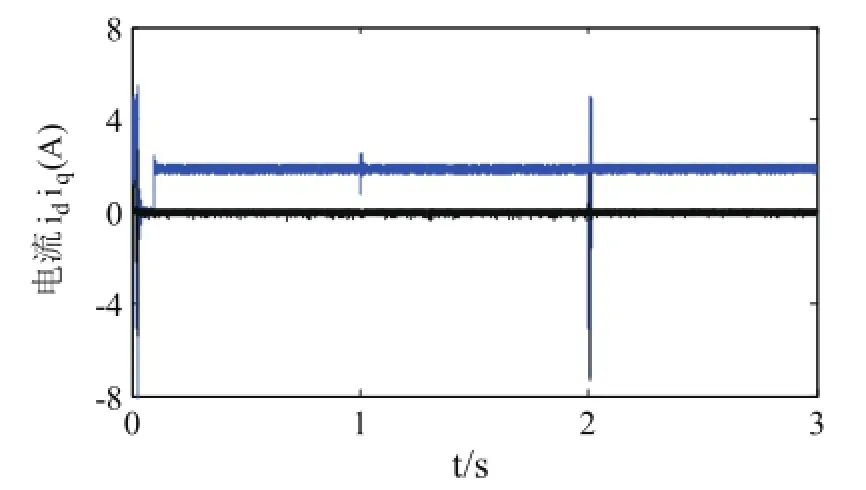
图10 无传感器控制系统交直轴电流Fig.10 Dq-axis current of senso rless control system
[1] Genduso F,Miceli R,Rando C,et al. Back EMF sensorless-control algorithm for high-dynamic performance PMSM[J]. IEEE Transactions on Industrial Electronics,2010,57(6):2092-2100.
[2] 张晓光,赵克,孙力,等.永磁同步电机滑模变结构调速系统动态品质控制[J].中国电机工程学报,2011,31(15):47-52. Zhang X G,Zhao K,Sun L,et al. Sliding mode control of permanent magnet synchronous motor based on a novel exponential reaching law[J]. Proceedings of the CSEE,2011,31(15):47-52.
[3] Zhu H,Xiao X,Li Y D.Torque ripple reduction of the torque predictive control scheme for permanent magnet synchronous motors[J]. IEEE Transactions on Industrial Electronics,2012,59(2):871-877.
[4] 杨建飞,胡育文.永磁同步电机最优直接转矩控制[J].中国电机工程学报,2011,31(27):109-115. Yang J F,Hu Y W. Optimal direct torque control of permanent magnet synchronous motor[J]. Proceedings of the CSEE,2011,31(27):109-115.
[5] Samir Kouro,Patricio Cortés,René Vargas,et al.Model predictive control—a simple and powerful method to control power converters[J]. IEEE Transactions on Industrial Electronics,2009,56(6):1826-1838.
[6] Yongchang Zhang,Wei Xie,Zhengxi Li,et al.Model predictive direct power control of a PWM rectifier with duty cycle optimization[J]. IEEE Transactions on Power Electronics,2013,28(11):1007-1015.
[7] 朱昊,肖曦,李永东.永磁同步电机转矩预测控制的磁链控制算法[J].中国电机工程学报,2010,30(21):86-90. Zhu H,Xiao Y,Li Y D. Stator flux control scheme for permanent magnet synchronous motor torque predictive control[J]. Proceedings of the CSEE,2010,30(21):86-90.
[8] Matthias P,Silverio B.Model predictive direct speed control with finite control set of PMSM drive systems[J]. IEEE Transactions on Power Electronics,2013,28(2):1007-1015.
[9] Shan Chai,Liuping Wang,Eric Rogers.A cascade MPC control structure for a PMSM with speed ripple minimization[J]. IEEE Transactions on Industrial Electronics,2013,60(8):2978-2987.
[10] 王剑,周洪亮,何朕.基于模型预测控制的混合动力汽车转矩协调控制方法研究[J].新型工业化,2014,4(3):29-37. W ang J,Zhou H L,He Z. Research on MPC based torque coordination control method for hybrid electric vehicle[J]. The Journal of New Industrialization,2014,4(3):29-37.
[11] 秦峰,贺益康,刘毅.两种高频信号注入法的无传感器运行研究[J].中国电机工程学报,2005,25(5):116-121. Qin F,He Y K,Liu Y. Comparative investigation of sensorless control with two high-frequency signal injection schemes[J].Proceedings of the CSEE,2005,25(5):116-121.
[12] 郑泽东,李永东,Maurice FADEL.基于EKF的PMSM无机械传感器矢量控制[J].清华大学学报(自然科学版),2009,49(10):9-12. Zheng Z D,Li Y D,Maurice FADEL.PMSM mechanical sensorless vector control based an extended kalman filter[J]. Journal of Tsinghua University (Sci & Tech),2009,49(10):9-12.
[13] 鲁文其,胡育文,杜栩杨,等.永磁同步电机新型滑模观测器无传感器矢量控制调速系统[J].中国电机工程学报,2010,30 (33):78-83. Lu W Q,Hu Y W,Du X Y,et al. Sensorless vector control using a novel sliding mode observer for PMSM speed control system[J]. Proceedings of the CSEE,2010,30 (33):78-83.
[14] 付明玉,吴宝奇,张晓霜. 基于反步滑模控制的动力定位船铺管循迹建模与分析[J].新型工业化,2014,4(3):17-22. Fu M Y,Wu B Q,Zhang X S. Modeling and analysis of trajectory tracking for DP vessel pipelaying based on back-stepping sliding mode method[J]. The Journal of New Industrialization,2014,4(3):17-22.
[15] 齐放,邓智泉,仇志坚,等.基于MRAS的永磁同步电机无速度传感器[J].电工技术学报,2007,22(4):53-58. Qi F,Deng Z Q,Qiu Z J,et al. Sensorless technology of permanent magnet synchronous motors based on MRAS[J]. Transactions of China Electrotechnical Society,2007,22(4):53-58.
Speed Sensorless Model Predictive Current Control for PMSM System Based on MRAS Observer
BAI Jian-yong, LIU Yu-jia
(Ji’nan Railway Bureau Qingdao paragraph, Qingdao 266000, China)
For the speed sensorless control system of permanent magnet synchronous motor stator resistance changed w ith tem perature rise, a model reference adaptive observer is proposed based on stator resistance on-line identification. The observer accurate estimates the motor speed and tracks stator resistance online, the stator resistance’s influence on the model reference adaptive observer was decreased. The identified stator resistance was used to current prediction model, to improve the control precision of the model predictive current controller. The experiment result verifies the a permanent magnet synchronous motor based on model reference adaptive observer speed sensorless model predictive current control system has good dynamic and static performance, and it also has strong robustness.
Permanent magnet synchronous motor; Speed sensorless; Model reference adaptive system; Model predictive current control
10.3969/j.issn.2095-6649.2015.09.009
BAI Jian-yong, LIU Yu-jia. Speed Sensorless Model Predictive Current Control for PMSM System Based on MRAS Observer[J]. The Journal of New Industrialization, 2015, 5(9): 52-58.
柏建勇(1988-),男,山东临沂人,硕士研究生,主要研究方向为电机驱动系统电流传感器故障容错控制等;刘雨佳(1987-),男,山东菏泽人,硕士研究生,主要研究方向为电机驱动系统故障诊断及容错控制等
本文引用格式:柏建勇,刘雨佳.基于MRAS观测器的PMSM无速度传感器模型预测电流控制[J]. 新型工业化,2015,5(9):52-58