基于MCU的节能高效的太阳能追日系统
2015-07-23赵佐权于松涛齐世清韩冰心
赵佐权,于松涛,齐世清,韩冰心
基于MCU的节能高效的太阳能追日系统
赵佐权,于松涛,齐世清,韩冰心
(东北大学秦皇岛分校 控制工程学院,河北 秦皇岛066004)
为进一步提高太阳能光伏板转换效率,设计一种节能高效的太阳能追日系统。系统结合太阳光强检测和太阳轨迹计算追日的各自优势,采用太阳轨迹法对追日系统进行粗调,采用太阳光强变化检测法对系统进行细调。利用直流电机和减速器的配合,控制太阳能板在东西方位上实现追日;利用由直流电机做驱动力的电动推杆控制太阳板在南北高度上实现追日。测试数据表明,系统提高了太阳能光伏板的转换效率,节能达30%以上。
追日系统;光强检测;太阳能轨迹法;转换效率
0 引言
太阳能作为一次清洁能源,应用越来越广泛,是未来主要能源之一。太阳能光伏电池转换效率较低[1],太阳能光伏板一般固定方位安装,不能充分利用太阳能。设计一种双轴跟踪系统,可进一步提高太阳能转换效率。
在本装置中,单片机通过对采集到的信号进行分析,输出控制信号分别作用在直流电机和电动推杆上以此控制装置的双轴跟踪追日。当单片机控制直流电机的转动时,通过减速器增大转矩,转速器与轴承+齿轮相连,驱动本装置系统在东西方向上实现追日。当单片机控制电动推杆伸长或者缩短时,通过推杆长度的变化,改变太阳能板的倾斜角度来实现南北方向上追日。太阳能追日系统整机采用低功耗设计,传动装置中加减速器,整机功耗很低。
1 机械装置设计
本装置在机械结构上主要由金属支架、电动推杆、齿轮+轴承、减速器、直流电机等组成,装置结构示意图如

图1 追日装置结构示意图Fig.1 Schematic diagram of tracking device structure
1.1倾斜角度驱动装置设计
在倾斜角度的控制中,主要是通过一个电动推杆来驱动。
电动推杆是一种将电动机的正反旋转运动转变为推杆的直线往复运动的电力驱动装置,主要由驱动电机、减速齿轮、滑座、安全开关、拨杆、螺杆、弹簧、导轨、外壳及推杆等组成。电机的转动通过大小齿轮减速后带动安装于内管的小螺杆,带动与之连接一起的做轴向运行螺母,螺母带动推杆运动,当直线运动至所设定的行程时螺母触角压住限位开关断开电源,电机停止运动。一般电动推杆标准行程在,100,150,200,250,300,350,400mm,特殊行程也可根据不同应用条件要求设计定做。电动推杆可以根据不同的应用负荷而设计不同推力的电动推杆,一般其最大推力可达6000N,空载运行速度为4mm~35mm/s,电动推杆以24V/12V 直流永磁电机为动力源,把电机的旋转运动转化为直线往复运动。在本作品中,电动推杆的行程为250mm,最大推力为900N,空载速度为4mm/s,驱动电机为12V。电动推杆结构示意图如图2所示。
在安装时,将电动推杆的轴头连接到太阳能板的底部,底部连接到装置的主轴上。通过电动推杆长度的变化来改变太阳能板的倾斜角度。
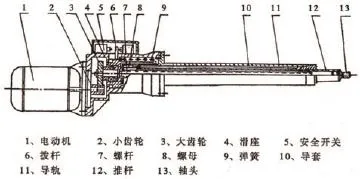
图2 电动推杆结构示意图Fig.2 Schematic diagram of electric pushrod structure
1.2转动角度驱动装置的设计图1所示。
在此部分功能设计上主要分为三部分:南北方向倾斜角度的控制装置设计、东西方向上转动角度的控制装置设计、上下连接传动的控制装置设计。
本装置上,东西方向上通过一个540直流电机和一个减速器来驱动。
减速器[2]主要是由几个大小不同的齿轮相互咬合而成。在两个齿轮啮合的部位,受大小相同,方向相反的切向力,并且满足一下的关系:
(齿轮B的半径x切向力)/(齿轮A的半径x切向力)
= 齿轮B的半径/齿轮A的半径
= 齿轮B的齿数/齿轮A的齿数
= 齿轮A的转速/齿轮B的转速
= 齿轮B的扭矩/齿轮A的扭矩
由上面的关系得,小齿轮转的快,大齿轮转的慢;小齿轮的转矩小,大齿轮的转矩大。通过这样的结构可以增大直流电机的转矩,驱动更大的负载;可以降低直流电机的转速,以较慢的速度更好的追日。减速器的结构示意图如图3所示。
本设计中,直流电机作为驱动源,通过减速器将驱动力的转矩放大后,驱动整个装置在东西方向上转动。由于驱动力仅由一个用电量极少的540直流电机提供,所以可以节约太阳能板产生的能量。
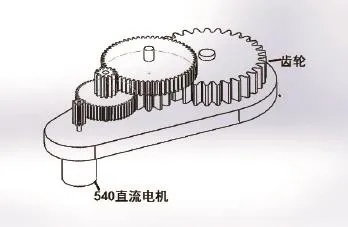
图3 减速器结构示意图Fig.3 Schematic diagram of the struc ture of the reducer
1.3上下连接装置的设计
本装置中上下连接部分的设计,主要通过一个轴承+齿轮来实现。
轴承+齿轮是由一个内嵌于齿轮的轴承组成,轴承的外沿与齿轮的内沿固定。齿轮通过5个螺丝与上方的转动装置固定。轴承的内沿与下方固定装置的铁柱固定。齿轮+轴承的作用主要是连接下方固定装置和上方转动装置,使减速器的转动不影响的固定装置,并且由于轴承的使用使上方的转动装置受到的摩擦力更小,使装置的转动更灵活,使装置更节约能量。齿轮+轴承结构示意图如图4所示。

图4 轴承+齿轮结构示意图Fig.4 Schematic diagram of the structure of bearing and gear
2 电控装置设计
如图5所示,该装置电动装置部分主要由控制器模块,光强检测模块,直流电机驱动模块,电动推杆驱动模块,电源模块,电子罗盘模块等组成。

图5 电控装置组成Fig.5 Electric control device
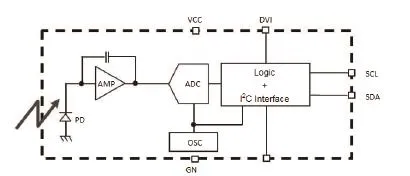
图6 BH1750FVI内部结构图Fig.6 BH1750FVI interna l structure diagram
2.1光强检测
检测光强时,采用BH 1750FV I[3-5]光强传感器。BH 1750FV I光强传感器的内部结构框图如图6所示。
太阳光经过光敏二极管PD将光照强度转化为PD电流,PD电流经过集成运算放大器AMP将PD电流转化为PD电压。ADC是16位的模数转化器,将PD电压转化成为0-65535的数字量。Logic + IC Interface的作用是将ADC转化器转化后的数字量放入寄存器中,方便控制器通过I2C协议读取到光强信息。OSC为内部振荡器,为内部电路的工作提供时钟。
BH 1750FV I光强传感器与单片机接口电路如图7所示。
模块的两个引脚SCL、SDA与单片机的P1ˆ0、P1ˆ1相连,通过I2C协议与单片机进行通信,读取的16位的值即为光照强度。

图7 光强模块接口电路Fig.7 Intensity module interface circuit
2.2电动推杆驱动
因为控制电动推杆伸长或缩短时,只需要将电压正反接,因此设计电动推杆驱动电路如图8所示。
电动推杆通过单片机P0ˆ2(DDTG1)、P0ˆ3 (DDTG2)控制。当DDTG1高电平时、DDTG2低电平时:三极管U 19导通,LED灯D 3、限流电阻R27、三极管U19所在的回路导通,R27电压近似为5V即继电器控制端电压为5V,继电器衔铁吸合,常闭触点断开,常开触点闭合,S-与OUT12V连接,电动推杆的一端接入12V电源的正极。三极管U 20不导通,LED灯D 4、限流电阻R28、三极管U 19所在的回路短路,继电器两端电压为0V,不工作。S+与DOGND相连,电动推杆的另一端接入12电源的地,此时电动推杆缩短。

图8 电动推杆驱动电路[5]Fig.8 Electric push rod drive circuit[5]
同理当DDTG1为低电平时、DDTG2为高电平时,电动推杆伸长;当DDTG1为低电平时、DDTG2为低电平时,电动推杆停止运动。
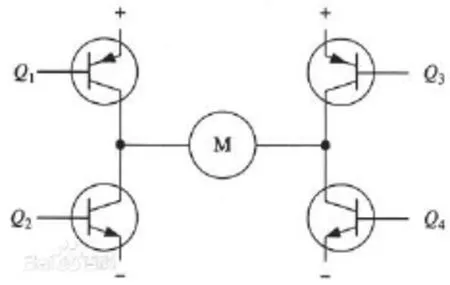
图9 全桥电路示意图Fig.9 Schematic diagram of the whole bridge circuit
2.3直流电机驱动[6-10]
直流电机采用540电机。为了更好地控制电机正反转,直流电机驱动电路由两个半桥驱动芯片IR2104和四个大功率场效应管IRF3205做成的全桥驱动电路。全桥电路示意图如图9所示。
桥式电机驱动电路包括4个三极管和一个电机。要使电机运转,必须导通对角线上的一对三极管。根据不同三极管对的导通情况,电流可能会从左至右或从右至左流过电机,从而控制电机的转向。
当Q1管和Q4管导通时,电流就从电源正极经Q1从左至右穿过电机,然后再经Q4回到电源负极。该流向的电流将驱动电机顺时针转动。
当Q2管和Q 3管导通时,电流就从电源正极经Q3从右至左穿过电机,然后再经Q 2回到电源负极。该流向的电流将驱动电机逆时针转动。直流电机驱动电路如图10所示。

图10 直流电机驱动电路Fig.10 DC motor drive circuit
场效应管U 6,U 9,U 12,U 13,电机组成全桥电路,全桥电路的控制有两个。
当PWM 1输入PWM波,PWM 2输入低电平时,U 9、电机、U12通路工作,电机正转。
当PWM 2输入PWM波,PWM 1输入低电平时,U 6、电机、U 13通路工作,电机反转。
2.4方位检测
方位检测主要通过霍尼韦尔HMC5883模块来实现。
霍尼韦尔HMC5883L磁阻传感器电路是三轴传感器并应用特殊辅助电路来测量磁场。通过施加供电电源,传感器可以将量测轴方向上的任何入射磁场转变成一种差分电压输出。磁阻传感器是由一个镍铁(坡莫合金)薄膜放置在硅片上,并构成一个带式电阻元件。在磁场存在的情况下,桥式电阻元件的变化将引起跨电桥输出电压的相应变动。通过分析输出电压的变化即可得航向。
与单片机接口电路如图11所示。
如图所示:模块的两个引脚SCL、SDA与单片机的P0ˆ4、P0ˆ5相连,通过I2C协议与单片机进行通信。
除以上三个模块以外,电子时钟模块用DS1302模块,风力检测用压力传感器模块,显示屏用OLED。

图11 方向检测接口电路Fig.11 Direction detection interface circuit
3 程序设计
单片机通过BH1750FV I模块获取太阳能板四个角的太阳光强,分别记为I左上,I左下,I右上,I右下。


在控制东西方向上旋转时:
当I左-I右>阈值1时,单片机控制直流电机顺时针旋转一个单位;
当I右-I左>阈值1时,单片机控制直流电机逆时针旋转一个单位;
当I左-I右<阈值1时或I右-I左<阈值1时,电机停转,静止不动。
在控制南北方向上倾斜时:
当I上-I下>阈值2时,单片机控制电动推杆收缩一个单位;
当I下-I上>阈值2时,单片机控制电动推杆伸长一个单位;
当I上-I下<阈值2时或I下-I上<阈值1时,电动推杆停止,静止不动。
由现场试验得,该装置按照5%的占空比输出时,太阳能板每隔8分钟左右东西方向上动作一次,每隔12分钟南北倾斜角度上改变一次。因此设计程序时将每次转动次数限制再一次以内,保证了由于阴天,有遮挡物时装置可以正常的追日,提高了系统的稳定性。
程序流程简图如

图12 程序流程简图Fig.12 Flow diagram
4 测试与结果
为了更好地体现本作品相对于固定式的优势,我们使用了同一厂家,同一批次的两块功率为50W的太阳能板。一块太阳能板采用固定式按照最佳的倾斜角度进行安装,另一块太阳能板安装在追日装置上。两块太阳能板分别通过两个功率100W阻值10Ω的水泥电阻进行放电,通过电流传感器WCS2705模块检测太阳能板的放电电流。由于该电路为纯电阻电路,太阳能板产生的能量约等于两个水泥电阻产生的热量,比较水泥电阻产生的热量即可得结果。
在秦皇岛市,从早上6:47到下午5:57进行试验。在实验过程中,MCU每一分钟检测一次两个太阳能板的放电电流,并通过串口发给电脑的上位机记录下来。实验结束后,得到670组电流数据。表1为每十分钟读取的一次电流的简表(单位:ma)。通过MATLAB对所的到670组数据以时间(单位:分钟)为横坐标,以电流(单位:ma)为纵坐标绘制曲线,如图13所示。
由公式图12所示。
当单片机刚开始上电时,各个模块初始化,光强检测传感器开始工作。系统首先根据光强追踪太阳到太阳,之后进入循环。对采集到的光照强度的分析控制直流电机和电动推杆动作,直流电机每动作一次太阳能板转动2°左右,电动推杆每动作一次,太阳能板倾斜角度改变一度左右。延时5~7分钟后从新检测太阳光强,进入循环。

得MATLAB中求取总功率的公式为:

通过计算得两种模式下产生总的能量分别是:固定式W1=661023.0焦耳,追日式W2=915328.0焦耳。所以本作品比传统固定式的效率提高了

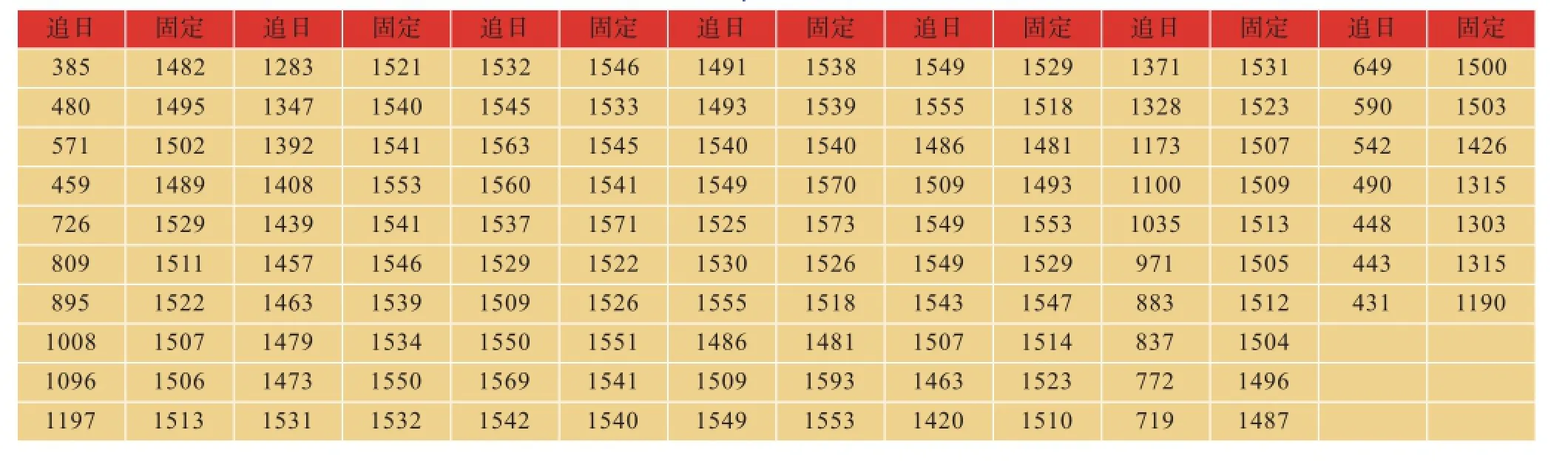
表1 部分实验数据Tab. 1 Experim ental data
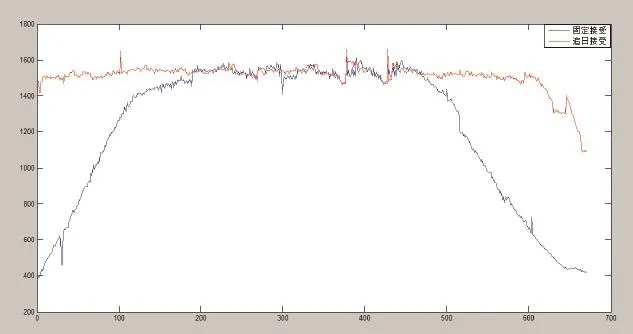
图13 固定式和追日式电流对比曲线Fig.13 Comparison of fixed and current curve tracking
通过合理真实的实验证明了本作品可以大大的提高太阳能板对太阳光的接受率。
由实际的测试数据知,
(1)从上午10点左右到下午2:30左右,固定式和追日式收集的光能的效率几乎完全一样。
(2)在早上6:47之前,追日式收集太阳光能的效率依旧远大于固定式收集的光能
针对以上两种现象,在以后的系统改进中可以将追日式系统在中午前后的四个小时进行停机休息,以此来节省能源,实现节能高效的利用太阳能的目的。
4 分析与展望
[1] 鲁瑾,李清岩. 新能源材料:硅基太阳能电池材料[J]. 新型工业化,2014,(12):36-45.
LU Jin,LI Qingyan. New energy material: silicon solar battery materials [J].The Journal of New Industrialization,2014,(12):36-45.
[2] 余国权. 基于CATIA和ADAMS的减速器参数化设计及仿真[D].大连理工大学,2006.
YU Guoquan. The design and simulation of reducer parameterization based on CATIA and ADAMS [D]. Dalian University of Technology,2006.
[3] 云中华,白天蕊.基于BH1750FVI的室内光照强度测量仪[J].单片机与嵌入式系统用,2012,(6):27-29. YUN Zhonghua,BAI Tianrui.Indoor light intensity measuring instrument based onBH1750FVI[J]. Microcontroller & Embedded Systems,2012,(6):27-29.
[4] 刘燮,吴苏晨,王瑞林. 基于BH 1750的LCD屏幕亮度自动调节设计与实现[J]. 硅谷,2013,(13):24-26+31. LIU Xie,WU Suchen,WANG Ruilin.Thedesign and implementation of Automatic ad justment of the LCD screen brightness based on BH 1750 [J]. Silicon Valley,2013,(13):24-26+31.
[5] 王建,毛腾飞,陈英革.基于BH1750芯片的测光系统设计与实现[J].常熟理工学院学报,2011,(2):117-120. WANG Jian,MAO Tengfei,CHEN Yingge. The design and implementation of metering system based on BH1750 chip [J]. Journal of Changshu Institute of Technology,2011,(2):117-120.
[6] 梁英进. 用S8050替换C2500三极管[J]. 家电检修技术,2006,(3):61. LIANG Yingjin.W ith S8050 replacement C2500 transistor [J]. Technology for Overhauling Electrical HomeAppliance,2006,03:61.
[7] 游志宇,杜杨,张洪,董秀成. 基于场效应管的直流电机驱动控制电路设计[J]. 国外电子元器件,2008,(2):3-6. YOU Zhiyu,DU Yang,ZHANG Hong,DONG Xiucheng. Design of the dc motor drive control circuit based on the field effect tube.[J]. Foreign electronic components,2008,(2):3-6.
[8] 胡发焕,邱小童,蔡咸健. 基于场效应管的大功率直流电机驱动电路设计[J]. 电机与控制应用,2011,(4):21-24. HU Fahuan,QIU Xiaotong,CAI Xianjian. Design of the high power dc motor drive circuit based on field effect tube[J].Electric Machines & Control Application,2011,(4):21-24.
[9] 谢少华,瞿遂春. 基于Matlab的无刷直流电机控制系统仿真研究[J]. 新型工业化,2015,(3):28-34. XIE Shaohua,QU Suichun.Simulation study on control system of Brushless DC Motor based on Matlab[J].The Journal of New Industrialization,2015,(3):28-34.
[10] 王超. MOSFET/IGBT半桥驱动芯片IR2111的应用研究[J]. 机电工程技术,2008,08:57-59. WANG Chao. The app lication and research of MOSFET/IGBT driver chip IR2111 [J]. Mechanical & Electrical Engineering Technology,2008,(8):57-59.
Solar Tracker Based on MCU Energy Efficient
ZHAO Zuo-quan, YU Song-tao, QI Shi-qing, HAN Bing-xin
(Northeastern University at Qinhuangdao, Qinhuangdao Hebei 066004)
In order to further improve the conversion efficiency of solar photovoltaic panels, design an energy-efficient solar tracker. System combined with sun light intensity detection and the sun trajectory calculation zhuiri respective advantage, the solar trajectory method of tracker for the coarse by sun light intensity change detection method to fine tune the system. Use DC motor and reducer w ith and control the solar panel in the east-west direction realize zhuiri; use by a DC motor driven electric putter control solar panels at the height of the north and south implementation of chasing the sun. Test data show that the system can improve the conversion efficiency of solar photovoltaic panels, energy saving is more than 30%.
Solar tracker; Light intensity detection; Trajectory; Conversion efficiency
10.3969/j.issn.2095-6649.2015.09.008
ZHAO Zuo-quan, YU Song-tao, QI Shi-qing, et al. Solar Tracker Based on MCU Energy Efficient[J]. The Journal of New Industrialization, 2015, 5(9): 44-51.
赵佐权(1992-),男,本科生,从事自动控制;齐世清(1963-),男,副教授,从事智能检测技术与自动控制,过程控制系统;
于松涛(1994-),男,本科生,从事自动控制;韩冰心(1995-),女,本科生,从事自动控制。
本文引用格式:赵佐权,于松涛,齐世清,等.基于MCU的节能高效的太阳能追日系统[J]. 新型工业化,2015,5(9):44-51