基于FAST的大型风力发电机功率优化研究
2015-07-23谭志翔王欣范定成
谭志翔,王欣,范定成
基于FAST的大型风力发电机功率优化研究
谭志翔,王欣,范定成
(湖南工业大学 电气与信息工程学院,湖南株洲 412007)
风机受自身机械结构的承受能力与电气负载极限的影响,需在其相应的工作状态限制其转速与功率。因此风电机组的控制主要分为额定风速以下的转速控制和额定风速以上的功率控制。本文主要针对额定风速以上对风机进行恒功率控制的研究。利用FAST软件建立风机的整机模型,并在Simu link中设计了一种基于功率反馈的PID变桨控制器,考虑到PID参数的选取对控制器的性能影响较大,而人工参数整定不一定能得到最佳参数,针对这一问题,采用粒子群算法(PSO)进行参数寻优,以此来优化功率曲线,仿真结果验证了其有效性。
风电机组;FAST;功率反馈;粒子群;
0 引言
风能是一种取之不尽、用之不竭的绿色可再生能源。风具有随机性,表现为风速和风向随时间都在不断变化,能量和功率也随之变化,并且风力发电机在实际运行过程中还会遭遇阵风,风切变,塔影效应等,怎样在风速快速变化与参数不确定的情况下使所设计的控制器具有较好的控制性能,是风电领域的一个研究热点。由于风机受自身电气负荷的限制,当风机处于额定风速以上时,必须限制其转速,使发电机功率维持在额定功率附近。变桨距控制技术就是通过调节叶片迎风角,改变气流对叶片的攻角,实现气动转矩的调节,从而达到限制功率的目的。目前大型风电机组的变桨距控制器仍是以PID 控制器为主流,但是PID控制器参数的选取直接影响控制器的性能,虽然人工参数整定的参数能满足工程设计要求,但是它不一定是最佳的参数。针对这一问题,本文首先介绍了风力发电机组的系统模型,在此基础上,以1.5MW水平轴风力发电机作为研究对象[1],利用FAST建立整机模型,并在Sim ilink中设计了一种基于功率反馈的PID变桨控制器,再利用粒子群寻优算法对PID的三个参数进行寻优。程序运行以及利用所得的参数进行仿真验证表明,粒子群寻优算法能较快的寻得一组最佳参数,为选取PID 控制器的参数提供了一种可行的手段。
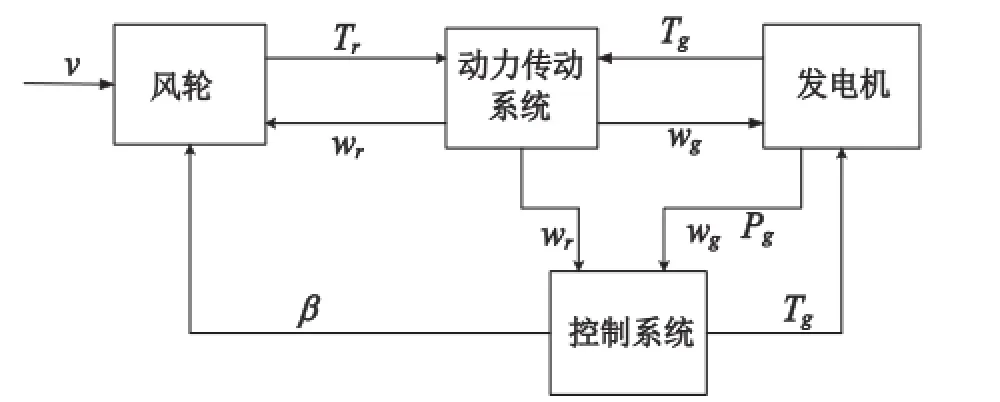
图1 风力发电机系统框图Fig.1 Block diagram of wind turbine
1 风力发电机组系统模型
风力发电机组是由风轮、动力传动系统、发电机和控制系统组成的有机整体。风机通过风轮捕捉风能,再经动力传动系统带动发电机发电,实现机械能到电能的转变。风力发电机组系统框图如图1所示[2]:
1.1风轮
风轮由叶片、轮毂、以及变桨机构组成,风机捕获风能由叶片来实现,由空气动力学及叶片的叶素理论可得风轮的气动功率P和气动转矩T分别为[2]:


式中P为风轮吸收的功率;ρ为空气密度;R为风轮半径;Cp和CT分别为功率系数和转矩系数,它们都是叶尖速比λ和桨距角β的非线性函数;v为风速。
变桨距执行机构可以用一阶惯性系统来表示:

其中,τβ为时间常数;β为实际桨距角;βref为参考桨距角。
1.2动力传动系统
传动系统一般由风轮侧低速轴、增速齿轮箱、发电机侧高速轴组成。将发电机组进行简化后,风轮的运动方程可表示为:

发电机侧运动方程:
式中,Jr、Jg分别为风轮与发电机的转动惯量,kg·m2;ωr、ωg分别是风轮与发电机的角速度;Dg、Dr分别是风力机端和发电机端的阻尼系数;Tr、Tm、Tg分别是风轮转矩、发电机侧高速轴转矩和发电机电磁转矩,N·m。
1.3发电机
变流器依据发电机转速的变化调节励磁电流的频率、相位以及幅值,实现发电机的恒频输出。因为风轮的机械响应要比电机的电磁响应慢很多,所以忽略其模型,假设发电机的负荷转矩通过转矩设定值即可立刻传递到电机转轴上,直接将发电机看作转矩源[3]。

式中,Tref为给定的发电机转矩。
2 控制系统
目前大多数变速变桨风力发电机的运行区域如图2所示。在区域2,风机在切入风速与额定风速之间运行,此时桨距角一般保持安装角不变,通过发电机转矩控制来控制发电机转速,使机组以最佳叶尖速比运行,最大限度地捕捉风能。在区域3,风速高于额定风速,此时需要通过变桨机构来调节叶片的桨距角以改变叶片攻角,通过降低或增大叶片的空气动力效率来达到限制功率的目的[4]。
图3为基于功率反馈的桨距控制原理图:

PID控制器的传递函数为[5]:其中Kp、Ti、Td为PID控制器的三个参数。

图2 转矩—速度曲线Fig.2 Torque-speed curve

图3 桨距控制原理图Fig.3 Pitch control diagram
3 粒子群寻优算法
粒子群算法与蚁群算法、鱼群算法类似,也是一种群体智能的优化算法[6]。算法中每个粒子都代表所求问题的一个潜在解,每个粒子对应一个由适应度函数决定的适应度值。每个粒子都有相应的位置与速度,粒子的速度决定了粒子移动的方向和距离,速度随自身以及其他粒子的移动经验进行动态调整,通过追随当前搜索到的最优值来寻找全局最优。粒子在搜索空间中的速度和位置由以下2个公式确定:式中,x表示粒子的位置;v表示粒子的速度;w为惯性因子;c1、c2为加速常数;r1、r2为[0,1]之间的随机数;pt是粒子迄今为止搜索到的最优位置;Gt是整个粒子群迄今为止搜索到的最优位置。


利用粒子群算法对PID控制器的参数进行优化设计,其过程如图4所示[6]:
PSO的流程如下:
(1)初始化粒子群,随机产生所有粒子的位置和速度,确定粒子的Pt、Gt。
(2)对每个粒子,将其适应值与该粒子所经历过的最优位置Pt的适应值进行比较,如较好,则将其作为当前的Pt。
(3)对每个粒子,将其适应值与整个粒子群所经历过的最优位置Gt的适应值进行比较,如较好,则将其作为当前的Gt。
(4)按式(8)、(9)更新粒子的速度和位置。
(5)如果没满足终止条件,则返回步骤(2);否则,退出算法,得到最优解。

图4 PSO优化PID的过程Fig.4 PSO optim ization o f PID process
4 程序运行结果与仿真分析
FAST有两种仿真方式[9]:一种是命令行仿真以及在MATLAB环境下与Simulink的联合仿真,本文采用的是第2种仿真方式。仿真前要准备好相应的主输入文件、塔基输入文件、塔架输入文件等。输出包含了各部件的载荷与形变的时序数据。这里以1.5MW变速变桨风力发电机为对象,通过FAST得到整个机组的非线性气弹模型,然后在Simulink中搭建桨距控制器与转矩控制器,其仿真模型如图5所示:

图5 Simu link仿真模型Fig.5 Simu lation model of simulink
仿真所需的风输入信号由FAST软件包中的Turbsim[10]生成,本文采用100s的IEC湍流风作为输入风信号,其风速模型如图6所示:
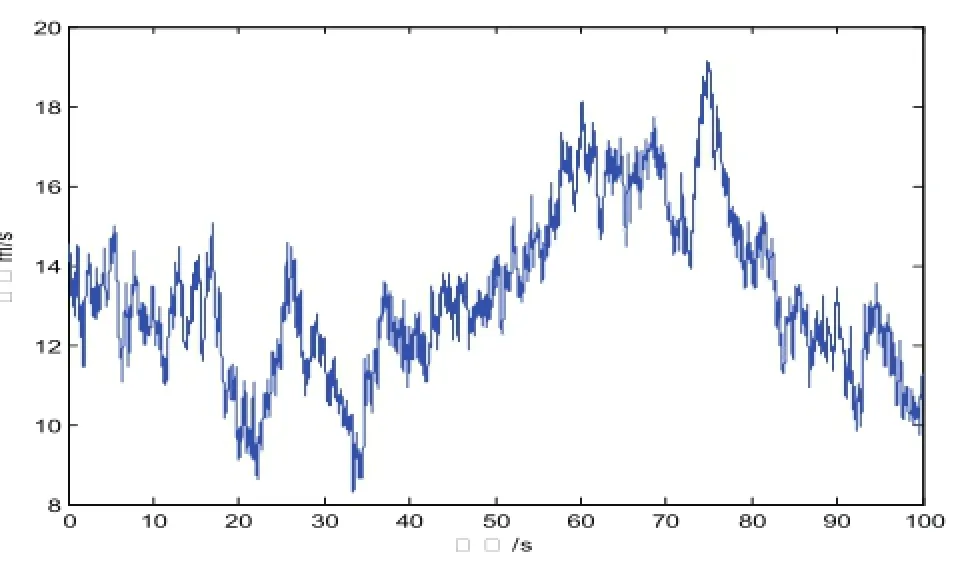
图6 风速Fig.6 Wind speed

为了优化模型中PID控制器的三个参数,而优化的目标是使得功率能限制在额定功率1500KW附近,所以粒子群算法中将性能指标选用为ITAE指标,其定义为:
式中,e(t)为功率误差。
粒子群算法中几个相关参数选取如下:
粒子种群规模即粒子数n=30;最大迭代次数Max Iter=300;位置上限为Ub=[0,0,0],下限为Lb=[−0.1,−0.1,−0.1]。运行程序得到的优化过程如图7所示。
从图中可看出整个粒子群在经过30次左右的迭代寻优便可以较快收敛到最佳的适应值,得到的最佳参数为zbest=[-1.28*10-3,-1.04*10-3,-0.186*10-3]。将此参数赋给Simulink模型中的PID控制器,然后运行模型得到的发电机功率曲线如图8所示。
图9是桨距角与风速的变化曲线,从图中可以清楚的看到,尽管风速在剧烈变化,但是桨距角的变化趋势基本与风速一致,这说明控制器能很好的跟踪风速的变化,达到稳定功率的目的。
图10为根据经验进行人工调整得到的一组参数所对应的功率曲线。
从图8与图10的对比可以看出,虽然它们的功率都能在额定功率附近上下波动,但是经过粒子群寻优算法得出的参数所对应的功率曲线,它的波动范围只有正负50,PID控制器性能得到了明显改善。

图7 参数优化曲线Fig.7 Parametric optimization curve
5 总结
本文介绍了大型风电机组的系统组成,并简单介绍了粒子群优化算法,然后利用FAST建立风电机组的整机模型,并在Simulink中搭建PID功率控制器,最后利用粒子群算法得到最佳参数并进行仿真验证。结果表明,所搭建的模型正确,粒子群算法所得到的PID的3个参数确实改善了控制器的性能。但是,由于该变桨控制器仅仅只是考虑了功率控制上的性能,而没有顾及叶片以及机组各结构部件的载荷,这对大型风力发电机来说是一个必须注意的问题,所以该控制方法还具有一定的局限性。

图9 桨距角与风速变化曲线Fig.9 The change curve of the pitch angle and wind speed

图10 人工参数整定的功率曲线Fig.10 Power curve of artificial parameter setting
[1] Jonkman J M,Buhl J R,Marshall L.FAST User’s Guide[R].National Renewable Energy Laboratory,2005.
[2] Pisu P,Ayalew B.Robust Fault Diagnosis for a Horizontal Axis W ind Turbine[C]. 18th IFAC World Congress,2011:7055-7060.
[3] Prats M,Carrasco J M,Galvan E,et al. Improving Transition between Power Optim ization and Power Lim itation of Variable Speed,Variable Pitch W ind Turbines using Fuzzy Control Techniques[C]. 26th Annual Conference of the IEEE,2000:1497-1502.
[4] 龚睫凯,孙文磊,吴安.基于FAST与Simulink风力发电机组降载荷控制研究[J].机床与液压,2013,41(17):131-134. J K Gong,W L Sun,A Wu.Control research in reducing the load of wind turbines based on the FAST and Simulink[J]. Machine Tool and Hydraulics,2013,41(17):131-134.
[5] 倪晗悦,丁嘉毅,曹婷,等.基于PID及PWM的无线传能系统研究[J].新型工业化,2014,4(9):56-61. H Y Ni,J Y Ding,T Cao,S Zhang. Wireless energy transfer system based on PID and PWM[J]. The Journal of New Industrialization,2014,4(9):56-61.
[6] 任丽娜,吕明月,刘爽爽,等.基于蚁群算法优化的变桨距自抗扰控制器[J].新型工业化,2014,4(6):43-48. L N Reng,M Y Lv,S S Liu,et al. Pitch control using active disturbance rejection controller based on colony optim ization algorithm[J]. The Journal of New Industrialization,2014,4(6):43-48.
[7] 薛婷.粒子群优化算法的研究与改进[D].大连:大连海事大学,2008. T Xue. Research and improvement of particle swarm optimization algorithm[D].Dalian:Dalian Maritime University,2008.
[8] 薛定宇.控制系统计算机辅助设计——MATLAB语言及应用[M]. 北京:清华大学出版社,2006. D Y Xue. Computer aided design of control system一MATLAB Language and Application[M]. Beijing:Tsinghua University press,2006.
[9] Jason M.Jonkman,Marshall L.Buhl Jr.Fast User’s Guide[R]. National Renewable Energy Laboratory,NREL/EL-500-38230,2005.
[10] Jonkman B J. TurbSim User’s Guide:Version 1.50[R]. USA:National Renewable Energy Laboratory/Tp-500-46198,September,2009.
Study on Power Optimization of Large Wind Turbine Based on FAST
TAN Zhi-xiang, WANG Xin, FAN Ding-cheng
(Schoo lof Electrical and Information Engineering, Hunan University of Techno logy, Zhuzhou, 412007, China)
According to the influence of the mechanical structure and the electric load lim its on the wind turbine, it is needed to lim it its speed and power based on its work status. Therefore, the control of the W ind Turbine system mainly consists of the speed control under the rated w ind speed and the pow er control above the rated w ind speed control. In this paper, the constant power control of the w ind turbine under the rated w ind speed is studied. The model of the w ind turbine is established by using FAST software, and a PID controller based on power feedback is designed in Simulink. Taking into account the large impact of the selected parameters on the performance of PID controller, and artificial tuning parameters may not be able to get the best response to this problem.To solve the problem, Particle swarm optimization(PSO) algorithm optim izes the parameters and the power curve. At last, the simulation results of the w ind turbine model verifies its effectiveness.
Wind Turbine; FAST; Power Feedback; Particle swarm optimization; Particle swarm optimization
10.3969/j.issn.2095-6649.2015.09.004
TAN Zhi-xiang, WANG X in, FAN Ding-cheng. Study on Power Optim ization of Large W ind Turbine Based on FAST[J]. The Journal of New Industrialization, 2015, 5(9): 20-25.
湖南省自然科学基金(13JJ3110)
谭志翔(1990-),男,硕士研究生,研究方向为复杂机电系统的信息集成与协调控制;王欣(1970-),女,教授,研究方向:工业过程控制与优化;范定成(1989-),男,硕士研究生,研究方向为风力发电。
本文引用格式:谭志翔,王欣,范定成.基于FAST的大型风力发电机功率优化研究[J]. 新型工业化,2015,5(9):20-25