提高微电网孤岛运行下垂控制动态性能的策略
2015-07-18张洁刘天琪刘建华李茜刘一奎
张洁,刘天琪,刘建华,李茜,刘一奎
(四川大学电气信息学院,成都610065)
其中:
提高微电网孤岛运行下垂控制动态性能的策略
张洁,刘天琪,刘建华,李茜,刘一奎
(四川大学电气信息学院,成都610065)
微网孤岛运行方式下,传统电压/频率下垂控制方法导致输出电压幅值和频率动态响应依赖于下垂增益、稳态运行点和滤波器参数。为消除这种依赖关系,通过小信号建模分析,在电压外环控制环节引入辅助控制信号,改变逆变器输出扰动方程,构造理想小信号模型,从而提高下垂控制动态性能。该策略能有效抑制输出电压幅值和频率的波动,削弱有功功率和无功功率的振荡,缩短系统暂态调整时间,并且避免了参数辨识,易于控制方法的实现。基于Matlab/Simulink的仿真验证了所提方法的可行性和有效性。
微电网;孤岛运行;下垂控制;小信号模型;动态性能
分布式电源DG(distributed generation)在配电网中具有运行灵活、节能环保等优点,由于大量的DG接入,传统配电网的规划设计方法和运行控制模式已无法适应新的发展需求,因此,由多个DG、储能装置和负荷所组成的微网作为可控单元接入配电网的技术受到了国内外的广泛关注[1-5]。微电网技术的应用使得传统配电网出现了一种新的常态运行方式,即孤岛运行。
微网孤岛运行时,需足够容量的DG向其内部负荷提供电能并维持系统电压和频率,这类DG一般采用电压源型逆变器作为接口[6]。逆变器的控制多采用电压/频率(V/f)下垂控制方法,这种方法无需机组间的通信协调,保证各DG输出功率按额定容量成比例分配,实现负荷与DG之间的“即插即用”和“对等”控制,成本低,可靠性高。微网的运行控制灵活但复杂,而分布式电源的接入又带来了大量电力电子装置,导致系统惯量较小,动态性能较差。因此,提高孤岛运行时下垂控制的动态性能是十分重要的。目前,已有不少文献对微网进行了小信号建模和仿真实验[7-8],提出影响下垂控制动态性能的相关因素,为控制器参数的优化设计提供了依据。但有关提高下垂控制动态性能的研究较少,文献[9-10]在下垂控制方程中加入积分或微分环节,较好地改善了系统的动态性能,但这类方法的改善效果依赖于比例积分微分控制参数的选取,需反复调试,实现过程繁琐;文献[11]提出改进型下垂控制策略以提高系统的动态性能,但引入瞬态下垂系数较多,其相互匹配过程比较复杂,增加了控制难度;文献[12]在改进下垂控制的小信号模型基础上提出引入辅助信号来改善输出功率的动态特性并取得了良好的效果,但在电压幅值和频率方面其动态特性较差。
微网在孤岛运行方式下与主配电网解列,失去外电网的电压频率支撑,所以提高微网下垂控制中电压幅值和频率的动态性能十分重要[13-14]。本文通过对V/f下垂控制方程进行小信号建模分析,得出电压幅值和频率动态响应依赖于下垂增益、稳态运行点和滤波器参数的结论,并提出改进策略。引入辅助控制信号,提高了下垂控制动态性能,并且避免了参数辨识,有利于控制方法的实现。最后,通过仿真分析验证了改进下垂控制策略的可行性和有效性。
1 V/f下垂控制
DG接入微网结构示意如图1所示。图中:Vdc为直流侧电压;Lf和Cf为三相滤波器等效电感和电容;v1、i1分别为LC滤波器输入电压和电感电流;vo、io分别为输出端电压和电流;Zl是线路的等效阻抗;、、vref分别为电压控制、电流控制、功率开关管的参考值;ω为参考电压角频率。

图1 DG接入微网结构示意Fig.1Structure diagram of DG unit in microgrid
V/f下垂控制器主要由功率下垂控制、电压外环控制和电流内环控制3部分组成。输出电压的幅值和频率由功率下垂控制环节计算给定,该环节是V/f下垂控制中的关键部分,其具体控制框图如图2所示。电压电流双环控制原理及框图可参见文献[7]。
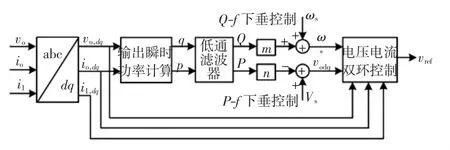
图2 功率下垂控制框图Fig.2Block diagram of power droop control
在图2所示的功率下垂控制环节中,输出端三相电压和电流经派克方程变换为d、q轴分量,瞬时有功功率和无功功率分别为

式中:p、q分别为瞬时有功功率和无功功率;vo,d、vo,q分别为输出电压d、q轴分量;io,d、io,q分别为输出电流d、q轴分量。
逆变器输出端瞬时功率经过低通滤波器后的平均功率为

式中:P和Q分别为平均有功功率和无功功率;ωc为低通滤波器的截止频率。
低压微电网中,逆变器输出阻抗与线路阻抗之和近似呈阻性,由于实际运行中输出电压与母线电压的功角差很小,因此,有功功率的流动主要由逆变器输出电压幅值决定,而无功功率的流动则主要由逆变器输出电压频率决定。如图2所示,平均功率经P-V和Q-f下垂控制得到参考电压幅值和角频率。定位参考电压幅值位于d轴,则q轴分量为0。V/f下垂控制方程[15]可表示为

式中:Vs和ωs分别为逆变器空载运行电压幅值和角频率;n和m分别为有功功率和无功功率下垂增益;和分别为参考电压幅值在d、q轴上的分量。
2 基于V/f下垂控制的改进策略
2.1 小信号模型
在微网孤岛运行方式下,由各DG保证系统的电压频率水平,对电压幅值偏差和频率偏差要求严格,因此,考察微网电压幅值和频率的动态性能更为重要。本文针对传统V/f下垂控制进行小信号分析,推导电压幅值和频率在小扰动下的瞬态响应公式。根据式(1),利用泰勒级数在稳态运行点处线性化,保留常数项和一次项,可以得到瞬时功率小信号模型,即

式中:“Δ”和下标“0”分别为小信号扰动量和稳态运行点的值。值得注意的是,当微网稳定运行时输出电压等于参考电压,Vo,q0=0。
线性化式(2)可得

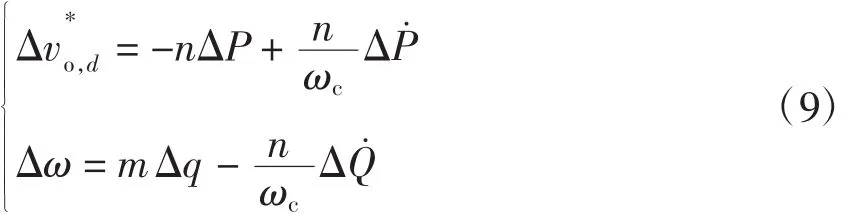
下垂控制方程式(3)和式(4)的小信号模型为

式中,Δvo,d、Δω分别为下垂控制参考电压幅值和频率的小信号扰动量。
将式(6)代入式(7)、式(8),得
将式(5)代入式(9)中,得
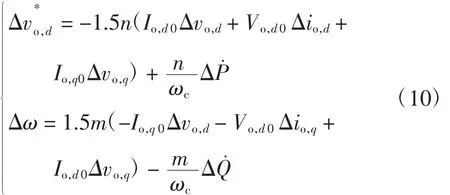
等式右边项说明下垂增益m和n,稳态工作点的Io,d0、Io,q0、Vo,d0,以及低通滤波器设计参数都会影响参考电压的动态响应。下垂增益的取值由逆变器输出电压幅值和频率的允许偏差决定,其值越大,不平衡功率分配越精确,但系统阻尼比减小,加剧了瞬态响应的振荡程度,使电压幅值和频率出现大幅度波动。
2.2 辅助控制信号
为了消除下垂增益、稳态潮流、低通滤波器参数给输出电压幅值和频率动态响应所带来的影响,最重要的一步是简化下垂控制参考电压幅值和频率的小信号模型。假设引入一定的辅助信号,可使式(10)中所依赖的下垂增益、稳态潮流和低通滤波器参数消失,由此提出目标小信号理想模型为

联立式(10)、式(11),得到理想模型下输出端电压幅值vo,d和vo,q的小信号表达式,即

其中:
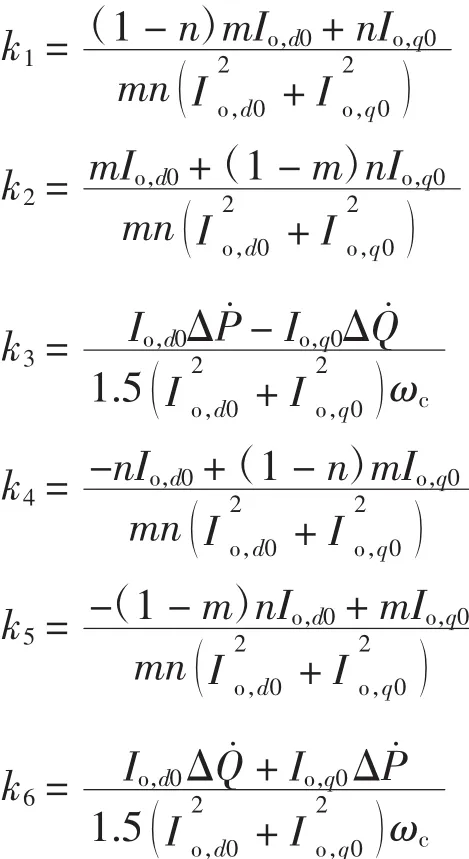
由于下垂增益m、n的数量级非常小,近似取1-n≈1和1-m≈1,可以简化式(12)中系数k1、k2、k4、k5。在传统下垂控制电压电流双环控制环节中,输入电压幅值是功率下垂控制环节中的参考电压与输出端电压的幅值差,即为功率下垂控制的参考电压幅值小信号和。本文在逆变器电压电流双环控制中引入辅助控制信号εo,d和εo,q,使输入端电压幅值差与式(12)中输出端电压幅值小信号相等,即可实现如式(11)目标小信号理想模型的闭环控制,其中

进一步考虑:在计算εo,d和εo,q时,为了避免在线估计稳态工作点Io,d0、Io,q0和Vo,d0的值,以有功功率P和无功功率Q来表示稳态参数。根据式(13)以及简化后的系数k1~k6,将辅助信号εo,d和εo,q改写为矩阵形式
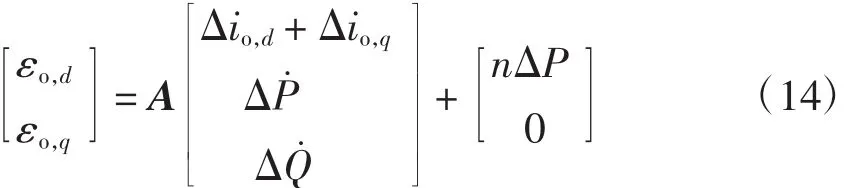
其中,

矩阵A中:P0和Q0由下垂控制低通滤波器输出的平均功率得到;Vo,d0近似为逆变器空载运行电压的幅值Vs,这种近似估计是合理的,因为微网要求其输出电压的幅值偏差范围很窄,从而可保证电能质量达到标准。
将提取出的辅助控制信号εo,d和εo,q送入电压电流双环控制环节输入端,即可改善逆变器输出电压幅值和频率的动态性能。整个控制框图如图3所示,虚线框内是本文改进部分,左侧虚框用于提取式(14)中各个参数,右侧虚框用于提取信号εo,d和εo,q,并送入控制单元。本文提出的改进控制策略采用高通滤波器提取小信号扰动量Δio,d、Δio,q、ΔP˙、ΔQ˙和ΔP,控制效果的好坏与滤波器的设计参数有关,即取决于低通滤波器和高通滤滤波器的通频带宽。
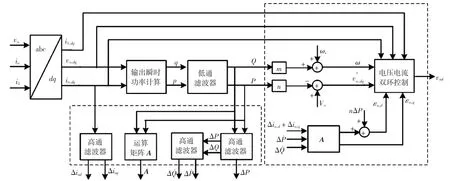
图3 改进V/f下垂控制框图Fig.3Block diagram of improved V/f droop control
3 仿真验证
3.1 仿真参数
为了验证所提改进控制策略的有效性,基于Matlab/Simulink搭建了如图4所示的微电网仿真模型。微电网运行频率为50 Hz,运行电压幅值为310 V,系统参数、控制参数、负荷参数、线路参数分别如表1~表4所示。

图4 微电网仿真模型Fig.4Simulation model of low voltage microgrid

表1 系统主要参数Tab.1Main parameters of the system
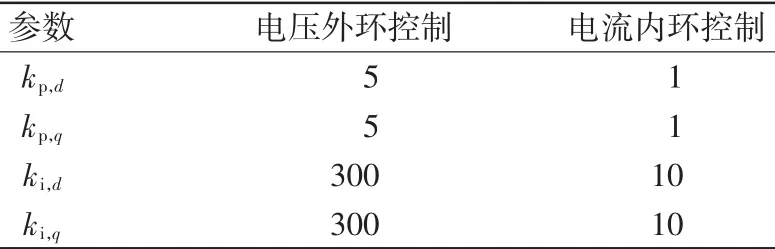
表2 控制参数Tab.2Control parameters
分别从投切负荷、增大下垂增益2个仿真算例来分析证明所提方法的有效性,并通过与传统下垂控制、文献[12]方法的对比仿真体现本文改进控制策略的优越性。
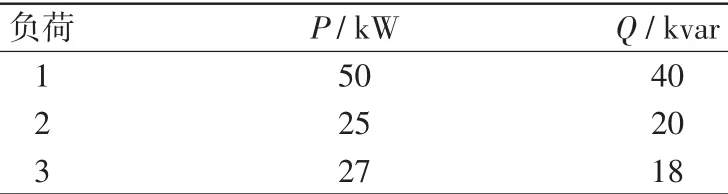
表3 负荷参数Tab.3Load parameters

表4 线路参数Tab.4Line parameters Ω
3.2 负荷扰动试验
微网在孤岛运行方式下,负荷的变化是引起微电网中各DG出力变化和电压、频率波动的主要原因。设定1 s前只有负荷1和负荷2与微电网相联,1 s时负荷3投入,1.5 s时将负荷3切除。对应的仿真结果如图5所示。
由图5可见,投入负荷3后,3种控制方法的频率和电压经过0.1 s暂态过程达到稳定状态。传统下垂控制频率波动幅值差为0.26 Hz,文献[12]方法为0.42 Hz,本文方法为0.2 Hz;传统下垂控制电压幅值超调量为6 V,文献[12]方法为11 V,本文方法为2 V;传统下垂控制输出功率产生振荡,文献[12]方法功率平滑过渡到稳定状态,本文方法只在第1个周波产生振荡后便可较平滑地过渡到新的功率分配点。切除负荷3时变化规律相同。比较可得:本文所提改进控制策略能够有效抑制频率波动和电压幅值波动,保证了微网的电能质量。虽然功率输出响应的改善不如文献[12]方法显著,但与传统V/f下垂控制相比,系统在暂态过程中功率振荡减弱,调整时间缩短,各DG能在短时间内趋于稳定。
3.3 下垂增益调节实验
微电网初始运行方式设定只有负荷1和负荷2与微电网相联,在1 s时刻,下垂增益m1、n1、m2、n2各增大2倍,对应的仿真结果如图6所示。
从图6(a)、(b)可以看出,微网采用传统V/f下垂控制时,下垂增益变化导致频率和电压幅值瞬态响应出现较大的波动,频率波动幅值差为0.05 Hz,电压幅值最低降落至294 V;本文方法中频率波动幅值差为0.02 Hz,电压幅值最低降落至298 V,其瞬态调整时间也比传统下垂控制短。比较可得:本文所提改进控制策略有效消除了频率和电压幅值的动态性能对下垂增益参数的依赖。
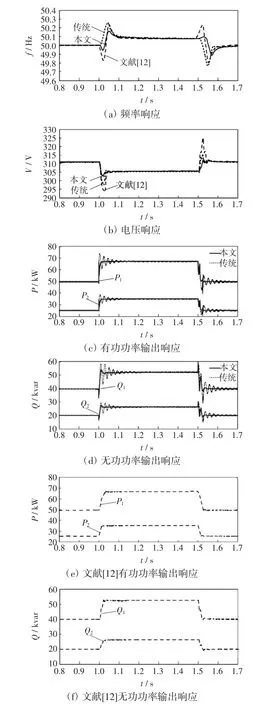
图5 负荷3并网/脱网时系统动态响应Fig.5Dynamic responses when load 3 connected/off
由图6(c)、(d)可见,DG逆变器下垂增益影响不平衡功率的分配,并且各DG承担的不平衡功率与下垂增益成反比。传统V/f下垂控制中,随着逆变器下垂增益的增大,系统阻尼比减小,有功功率和无功功率在暂态过程中振荡程度更严重,甚至可能失去稳定。本文提出的改进控制方法较好地抑制了输出功率波动,缩短了暂态响应过程。
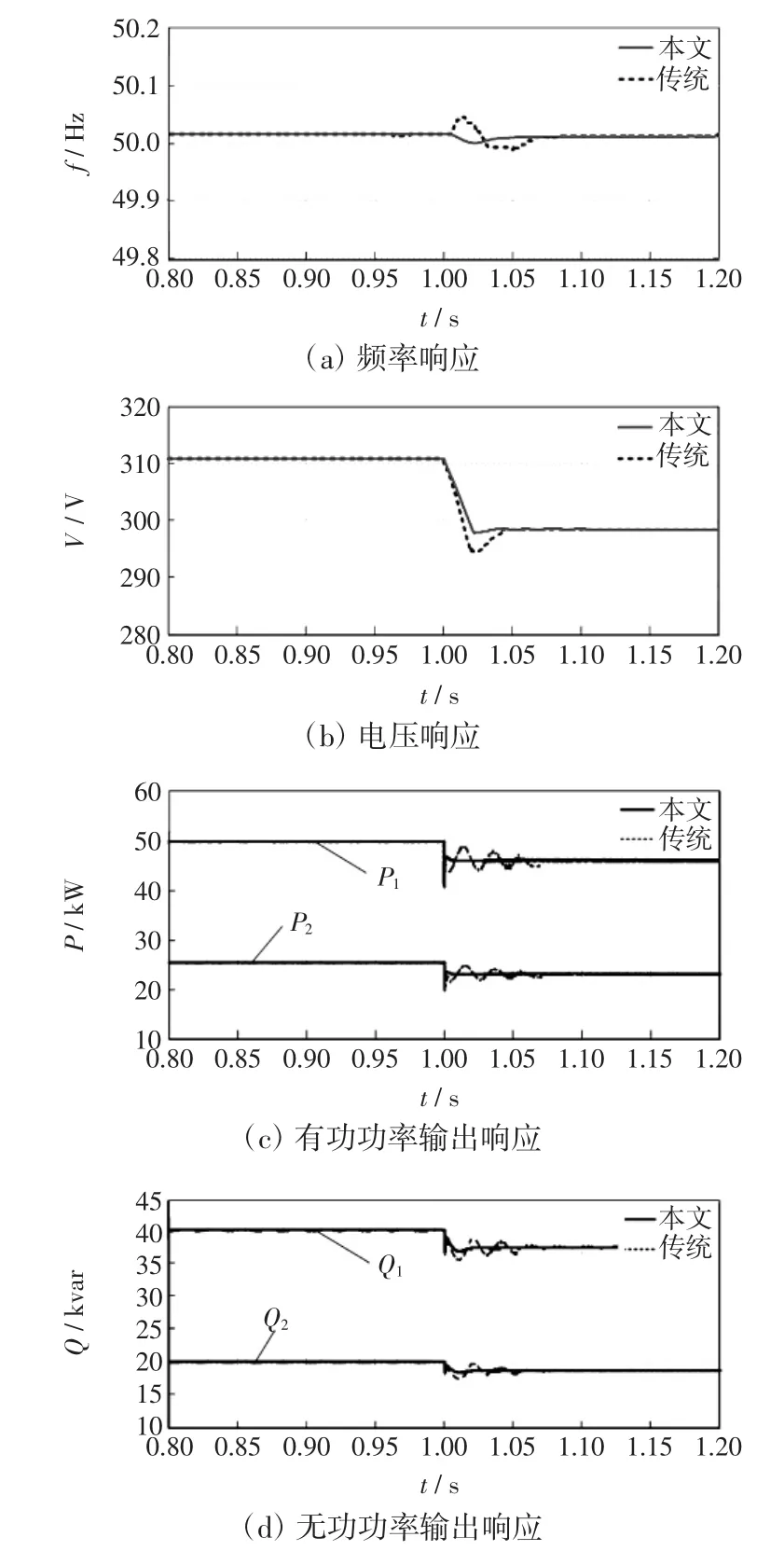
图6 下垂增益增大时系统动态响应Fig.6Dynamic responses when droop gains increasesed
4 结语
本文对传统V/f下垂控制进行了小信号建模分析,提出微网孤岛运行时提高下垂控制动态性能的改进策略。控制方法不需要参数辨识,易于实现。仿真分析表明,在V/f下垂控制中引入辅助控制信号,能够有效抑制暂态过程中输出电压幅值和频率的波动,削弱有功功率和无功功率的振荡。改进后的下垂控制具有良好的动态性能,证明了本文所提控制策略的可行性和有效性。
[1]Lasseter R H.Microgrids[C]//IEEE Power Engineering Society Winter Meeting.New York,USA:2002.
[2]黄伟,孙昶辉,吴子平,等(Huang Wei,Sun Changhui,Wu Ziping,et al).含分布式发电系统的微网技术研究综述(A review on microgrid technology containing distributed generation system)[J].电网技术(Power System Technology),2009,33(9):14-18,34.
[3]赵宏伟,吴涛涛(Zhao Hongwei,Wu Taotao).基于分布式电源的微网技术(Reviewofdistributedgenerationbased microgrid technology)[J].电力系统及其自动化学报(Proceedings of the CSU-EPSA),2008,20(1):121-128.
[4]马力(Ma Li).混合系统微网控制策略分析(Control strategy analysis of hybrid system in micro-grid)[J].电力系统及其自动化学报(ProceedingsoftheCSU-EPSA),2010,22(6):104-108.
[5]乔蕾,段绍辉,汪伟,等(Qiao Lei,Duan Shaohui,Wang Wei,et al).独立微网系统优化规划设计方法综述(Reviews on optimal methods for planning of stand-alone microgrid system)[J].电力系统及其自动化学报(Proceedings of the CSU-EPSA),2013,25(2):115-123.
[6]肖朝霞,王成山,王守相(Xiao Zhaoxia,Wang Chengshan,Wang Shouxiang).含多微型电源的微网小信号稳定性分析(Small-signal stability analysis of microgrid containing multiple micro sources)[J].电力系统自动化(Automation of Electric Power Systems),2009,33(6):81-85.
[7]张建华,苏玲,刘若溪,等(Zhang Jianhua,Su Ling,Liu Ruoxi,et al).逆变型分布式电源微网小信号稳定性动态建模分析(Small-signal dynamic Modeling and Analysis of a microgrid composed of inverter-interfaced distributed generations)[J].电力系统自动化(Automation of Electric Power Systems),2010,34(22):97-102.
[8]杨俊虎,韩肖清,姚岳,等(Yang Junhu,Han Xiaoqing,Yao Yue,et al).基于Matlab/Simulink的下垂控制微电网动态特性的仿真与分析(Dynamic performance simulation and analysis of the droop controlled microgrid based on Matlab/Simulink)[J].电力学报(Journal of Electric Power),2012,27(1):15-18.
[9]Guerrero J M,de Vicuna L G,Matas J,et al.A wireless controller to enhance dynamic performance of parallel inverters in distributed generation systems[J].IEEE Trans on Power Electronics,2004,19(5):1205-1213.
[10]Guerrero J M,de Vicuna L G,Matas J,et al.A wireless load sharing controller to improve dynamic performance of parallel-connected UPS inverters[C]//IEEE 34th Annual Power Electronics Specialists Conference.Acapulco,Mexico:2003.
[11]张尧,马皓,雷彪,等(Zhang Yao,Ma Hao,Lei Biao,et al).基于下垂特性控制的无互联线逆变器并联动态性能分析(Analysis of dynamic performance for parallel operation of inverters without wire interconnections)[J].中国电机工程学报(Proceedings of the CSEE),2009,29(3):42-48.
[12]Haddadi A,Yazdani A,Joos G,et al.A gain-scheduled decoupling control strategy for enhanced transient performance and stability of an islanded active distribution network[J].IEEE Trans on Power Delivery,2014,29(2):560-569.
[13]张明锐,杜志超,黎娜,等(Zhang Mingrui,Du Zhichao,Li Na,et al).高压微网孤岛运行时频率稳定控制策略研究(Control strategies of frequency stability control in islanding high-voltage microgrids)[J].中国电机工程学报(Proceedings of the CSEE),2012,32(25):20-26.
[14]郭力,王成山(Guo Li,Wang Chengshan).含多种分布式电源的微网动态仿真(Dynamical simulation on microgrid with different types of distributed generations)[J].电力系统自动化(Automation of Electric Power Systems),2009,33(2):82-86.
[15]张明锐,黎娜,杜志超,等(Zhang Mingrui,Li Na,Du Zhichao,et al).基于小信号模型的微网控制参数选择与稳定性分析(Control parameter selection and stability analysis of microgrid based on small-signal model)[J].中国电机工程学报(ProceedingsoftheCSEE),2012,32(25):9-19.
Droop Control Strategy for Enhanced Dynamic Performance in Islanding Microgrid
ZHANG Jie,LIU Tianqi,LIU Jianhua,LI Qian,LIU Yikui
(School of Electrical Engineering and Information,Sichuan University,Chengdu 610065,China)
In the islanded microgrid operation mode,the traditional voltage/frequency droop control method always results in that dynamic responses of the output voltage amplitude and frequency depend on the droop gains,steady-state operating point and filter parameters.In order to eliminate these dependencies,an ideal small-signal model is constructed by the small-signal modeling analysis with introducing control auxiliary signals in the outer voltage control link to change the inverter output perturbation equations,thus improving dynamic performance of the droop control.The proposed strategy could effectively suppress the fluctuations of the output voltage amplitude and frequency,weaken the oscillation of the active power and reactive power,shorten the system transient adjustment time,and easily to be implemented by avoiding the parameter identification.Simulation results based on Matlab/Simulink show that the proposed method is feasible and effective.
microgrid;islanded operation;droop control;small-signal model;dynamic performance
TM711
A
1003-8930(2015)05-0075-06
10.3969/j.issn.1003-8930.2015.05.14
张洁(1990—),女,硕士研究生,研究方向为电力系统分析计算及稳定。Email:468079751@qq.com
2014-05-07;
2014-12-15
国网上海市电力公司科技项目(20132700815-WB01)
刘天琪(1962—),女,博士,教授,博士生导师,研究方向为电力系统分析计算与稳定控制、高压直流输电、调度自动化。Email:tqliu@sohu.com
刘建华(1990—),男,硕士研究生,研究方向为分布式发电技术,微电网和主动配电网的运行与分析。Email:ljh202 @126.com
