基于空时融合隐马尔科夫模型的舰艇编队目标识别方法
2015-07-12波姜永华李敬军卢
但 波姜永华李敬军卢 毅
①(海军航空工程学院电子信息工程系 烟台 264001)
②(海军装备部 成都 610100)
基于空时融合隐马尔科夫模型的舰艇编队目标识别方法
但 波*①姜永华①李敬军①卢 毅②
①(海军航空工程学院电子信息工程系 烟台 264001)
②(海军装备部 成都 610100)
基于末制导雷达搜索舰艇编队目标时获得的目标大角域高分辨距离像(HRRP)信息,该文建立了描述单个HRRP样本内向量之间统计关系的“各态历经”空间隐马尔可夫模型(SHMM)和描述HRRP样本之间统计关系的“从左到右”时间隐马尔可夫模型(THMM)。与对一类目标全方位角训练数据只建立一个THMM模型的方法相比,该方法充分利用目标的大角域HRRP信息,提高了识别性能。通过对5类舰船目标的仿真和3类民用船只的外场实测数据分析表明该方法的有效性。
雷达高分辨距离像;空间隐马尔可夫模型;时间隐马尔可夫模型;编队目标识别
1 引言
雷达高分辨距离像是用宽带雷达信号获取的目标散射点子回波在雷达视线方向投影的矢量和,它反映了目标散射点在距离方向上的分布情况,对目标识别与分类具有重要意义[1,2]。
隐马尔可夫模型是一种统计分析模型,在80年代得到了Bell实验室Rabiner等人的传播进而在理论上和实践上均有了突飞猛进的发展,并进一步应用到了模式识别领域,目前已有很多文献进行了相关研究并取得了一定成效[3−5]。
文献[6,7]探讨了基于单个雷达高分辨距离像(High Resolution Range Profile, HRRP)样本的特征作为观察序列建立隐马尔可夫(Hidden Markov Model, HMM)的方法,对单个测试样本的识别实验表明该方法具有较好的识别性能。但是该方法存在如下不足:
(1)针对方位角变化为大角域的目标时没有充分利用其在时间维上隐含的目标信息;
(2)识别时只考虑了单个测试样本,实际上忽略了部分可利用的样本数量。
文献[8]将等角域划分后每一帧内的多个HRRP样本当做序列,对训练样本序列建立HMM模型。但是该方法存在如下不足:
(1)训练样本是从一个近似认为符合同一散射点模型中抽样得到,因此假设抽样后的样本间是独立同分布并不合理;
(2)采用RELAX方法提取目标HRRP散射中心幅度、位置参数作为特征,但是这种特征对噪声和目标闪烁很敏感,而且其最终识别结果与指定的强散射点个数有关;
(3)需要训练数据和测试数据采样率一致,这一点很难满足。
文献[9,10]将等角域分帧处理后的多帧样本当做序列,对全方位训练样本序列建立HMM模型。其中,文献[9]中提出的方法存在文献[8]中的第(2)和第(3)点不足,文献[10]提出的方法存在文献[8]中的第(3)点不足。
为了解决上述问题,考虑到末制导雷达在搜索舰艇编队目标阶段可获得的目标大角域角度变化信息,建立了描述单个HRRP样本内向量之间统计关系的“各态历经”SHMM模型和描述HRRP样本间统计关系的“从左到右”THMM模型,识别时对时域分类效果不佳的目标进一步采用基于分层识别算法的空时融合HMM模型(Spatial and Temporal Fusion HMM with SHMM, S-STF-HMM)进行识别,最后完成对整个编队目标舰船类型的识别。
2 问题描述及基本定义
2.1 问题描述
反舰导弹发射平台的火控雷达探测到远距离处的一个舰艇编队(如图1所示),图中D为编队相邻舰艇的距离,T1~T5分别代表5种不同类型的舰船。通过发射平台的火控系统向导弹装订由火控雷达探测到的编队目标的位置信息。经过导弹自控段飞行后,末制导雷达在t0时刻开机,雷达在其最大搜索区域搜索一遍,录入所有探测到的目标信息。t1时刻为末制导雷达搜索结束时刻,然后利用搜索阶段获取的目标信息完成对目标的识别。
2.2 基本定义
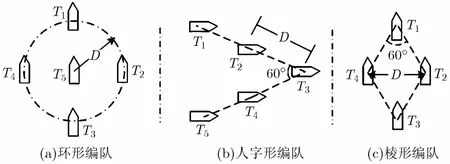
图1 编队队形
2.2.1 编队队形散布圆的定义 将编队队形的最大外接圆所覆盖区域称为“编队队形散布圆”,RBD表示其半径大小。
2.2.2 实际捕捉坐标系 末制导雷达对目标的实际捕捉坐标系为固定在舰船上的OXYZ坐标系。过编队散布圆心O与编队运动方向定义为X轴,Y轴垂直于X轴,OZ轴垂直于OXY构成的平面。以图1所示的环形编队为例,设其初始航行方向为0°。设在末制导雷达搜索时刻,编队的实际航向为ζ,则让编队队形绕编队队形散布圆的圆心旋转角度ζ,导引头开始搜索时实际捕捉坐标系如图2所示。
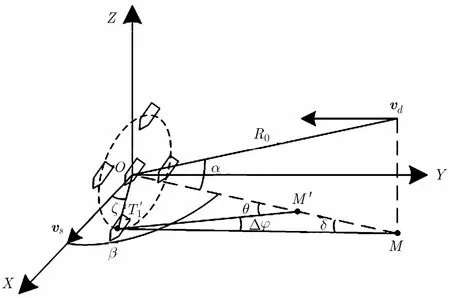
图2 末制导雷达实际捕捉系示意图
其中,R0为导引头与编队圆心的距离,M和M′分别为导弹t0和t1时刻在坐标系中的投影。vd和vs分别为导弹和舰艇编队运动速度。Δϕ为末制导雷达在搜索过程中的相对于编队目标T1的方位角变化,δ和θ分别为t0和t1时刻导弹与目标T1相对于导弹运动方向的夹角,α表示雷达入射余角,β为雷达入射方向相对于编队1中心舰船初始航向的方位角,则雷达入射方向可表示为[11]

在导弹搜索时间Δt内,设弹目相对运动速度为v,以ωm表示导引头飞行与舰船航行所产生的有效转动角速度矢量,它垂直于雷达视线与弹目相对速度矢量所构成的平面:

(1)由ωm导致的弹目相对转角变化

假设导弹飞行速度为300m/s,初始俯仰角αv,ψ=5°(雷达在搜索阶段高度较低),飞行时间Δt= 60s,距离编队圆心的距离为30 km,舰船航速为30 kn,约15 m/s, β=60°。则舰船航行产生的转角变化为0.021°,由于舰船速度远小于导引头运动速度,所以该部分转角变化可以忽略。以上分析均针对编队1的中心目标,对其它目标分析类似。
(2)导引头飞行引起的与舰船方位角变化 因为导弹的飞行方向是朝向编队散布圆的圆心,所以位于编队圆心的舰船在导弹飞行过程中的方位角不会发生变化,考虑编队圆心外的其它舰船T1。
因为编队的实际航向为ζ,经推导得到实际捕


假设探测到的ζ=45°,β=80°,Δt=60s。计算可得方位角变化Δϕ=13.62°,初始方位角可表示为λ=δ+β−ζ。其中,δ代表OM构成三角形的角,β代表雷达入射方向相对于舰船航向的方位角,ζ代表编队初始方位角。其中
按照上述假设条件计算可得δ=6.32°,此时获得的弹目相对方位角变化范围为41.31°~54.93°。同理根据图1所示的编队初始位置及上述分析的具体变换可以推导出其它目标的相对角度变化关系。经推导可得0°≤Δϕ≤15.58°,当时对应方位角变化最小为0°,时对应方位角变化最大为15.58°。
3 空时HMM建模方法研究
3.1 HRRP时频特征提取3.1.1时域特征 在不发生越距离单元走动(Migration Through Resolution Cell, MTRC)的角度范围内(本文均认为为3°),可认为各距离单元的散射点和其复反射系数是不变的。目标HRRP可用复向量表示为,其中“T”表示转置运算。hn表示第n个距离单元的子回波,N表示HRRP中距离单元个数。
对HRRP进行取模操作即可得到HRRP的时域特征:

式(7)表示的就是时域特征,其直观地反映了目标的尺寸和散射点分布等物理结构特性。
3.1.2 频域特征 对时间连续的实信号xT={x(t), t∈T}做快速傅里叶变换可以定义目标的频域特征,其功率谱定义为

其中

3.2 HMM参数学习
传统的HMM训练前指定隐状态总数的选择直接影响最终识别结果,基于TSB-HMM的识别方法可避免该问题。此方法能在估计参数集的同时,自动确定隐状态个数,较适合于训练数据小角域未知“状态”的SHMM模型[6]。而对于训练数据大角域的情况,在有限临近的方位关系集合中,目标散射物理特性变化较缓慢,相应的HRRP可近似统计为平稳的。每个这样的方位角度集合可抽象为一个“状态”,该状态物理意义较为明确。因此,对SHMM模型参数的学习采用Visual Basic算法[6,12],而对Δt=60 s 的仿真条件计算得到舰艇编队各个目标相对方位角度Δϕ的变化如图3所示。其中,T1舰船的相对方位角变化Δϕ在ζ位于0°~37°及53°~90°时大于门限值(门限值选定为4°是考虑到建立THMM模型时需要覆盖目标的多帧角度范围,而MTRC角度已在第3.1.1节中设置为3°);T2与T4THMM模型参数的学习采用经典Baum-Welch算法[9,13]。
3.3 大小角域样本识别处理流程
以图1中环形编队为例,通过式(5)式及舰艇编队初始方位角ζ=0°~90°,间隔为1°, β=80°,舰船的相对方位角变化Δϕ在ζ的整个变化范围内均大于门限值;T3舰船的相对方位角变化Δϕ在ζ位于0°~31°及59°~90°时大于门限值;而位于编队散布圆圆心的T5的Δϕ恒等于0。
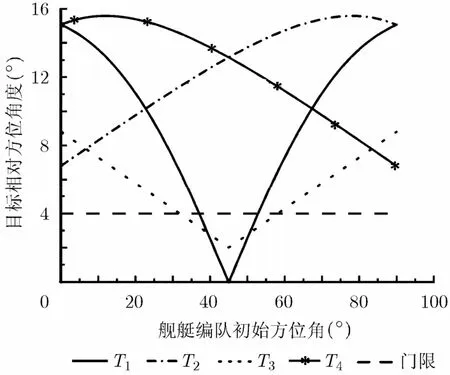
图3 舰艇编队各个目标相对方位角度Δϕ的变化
3.3.1 小角域样本识别处理流程 针对小角域目标直接对不发生MTRC角度范围内的每帧的距离像样本进行非相干平均后依次建立SHMM模型,这样若对于每个目标0°~180°方位角范围进行建模,每类目标需要建立60个基于时域特征的SHMM模型和60个基于频域特征的SHMM模型。识别时如果待识别目标是运动的,此时可以获知其起始方位角和方位角的变化范围,然后将小角域的多个测试样本进行非相干平均后输入对应SHMM模型进行匹配识别,从而减少匹配识别的运算量;如果待识别目标是静止的,则直接将小角域的多个测试进行非相干平均后输入SHMM模型进行匹配,通过输出最大似然概率判断测试样本所属目标类型。
3.3.2 大角域样本识别处理流程 针对大角域目标的THMM建模首先将获得的角域按照MTRC进行帧划分,对每帧的样本进行非相干平均处理作为大角域THMM建模的序列。同时每帧内获得的非相干平均样本用作小角域SHMM模型建模。然后可将建立THMM模型需要的角度范围可设定为6°,9°, 12°和15°(按照3.3节中分析,15°足以反映目标的最大方位角变化),对每个目标0°~180°方位角范围进行THMM建模,每类目标需要建立230个基于时域特征的THMM模型和230个基于频域特征的THMM模型,这在测试数据进行识别时的运算量是相当大的。如果待识别目标是运动的,则可以获知其起始方位角和方位角的变化范围,这时可以利用获得的方位角变化范围减小3/4的计算量,同时,可以利用起始方位角进一步限制搜索的HMM模型的起始方位,从而大量降低匹配的计算量。
设对于方位角变化为大角域采用STF-HMM模型得到的一次识别结果为Γ。首先将大角域和小角域的识别结果(判断正确为1,错误为0)权重等概率设置,即大角域权重设置为0.5,对于划分成的小角域权重设置为0.5/Mc, Mc为大角域划分成小角域包含的帧数目,然后综合大小角域的样本识别结果,若Γ≥0.5,则认为该次为正确判别,否则为错误判别。这样认为只要大角域判断正确,或者小角域全部判断正确,则认为该次的识别是正确的。
对于非合作目标时,由于目标的有意非一致运动,会造成编队队形一定程度的扭曲,对于目标的角域信息获取也会发生较大改变,此时可按照3.3.1节所述的小角域样本识别处理流程对目标进行识别,只需少数几个测试样本进行非相干平均后输入对应SHMM模型即可进行匹配识别。
3.4 基于S-STF-HMM的雷达目标识别步骤
(1)训练阶段
步骤1 采用等间隔角域划分方法来确定整段训练数据的方位帧,并认为在方位帧范围内可以忽略散射点MTRC效应,将训练样本进行能量归一化和包络对齐;
步骤2 采用3.1.1节以及3.1.2节提出的方法分别提取目标的时域特征及频域特征;
步骤3 对距离像样本进行帧内非相干平均后依次建立帧内基于时域和频域的SHMM,按照3.2节学习模型参数;
步骤4 对距离像样本进行帧内非相干平均后依次建立帧间基于时域和频域的THMM,按照3.2节学习模型参数,帧间角度范围取为3°;
步骤5 保存训练完后的模型参数,建立训练模板库。
(2)测试阶段
步骤1 对测试样本数据进行预处理,包括包络对齐及能量归一化等操作;
步骤2 采用3.1.1节以及3.1.2节提出的方法分别提取目标的时域特征及频域特征;
步骤3 针对小角域与大角域样本,分别按照
3.3.1 节与3.3.2节的方法,采用基于时域特征的SSTF-HMM模型对目标进行分类;
步骤4 对于时域特征分类效果不佳的情况,采用基于分层算法的S-STF-HMM模型对测试样本进行重新分类,最后综合编队所有目标的识别结果完成对编队目标的整体识别。
4 仿真实验与分析
4.1 仿真实验数据分析
本文首先采用某电磁仿真软件仿真计算了某型濒海战斗舰、某型护卫舰A(Frigate A, FRA)、某型护卫舰B(Frigate B, FRB)和某型驱逐舰和某型航母一共五类舰船目标的转台数据。为了增加对同型护卫舰的识别难度,将FRB的模型参数进行了缩放,并和FRA的尺寸参数保持一致。其中,濒海战斗舰长127.5 m,宽31.2 m,高32.5 m;护卫舰长98.8 m,宽9.8 m,高27.3 m;驱逐舰长135.8 m,宽14.6 m,高26.4 m;航母长253.9 m,宽49.7 m,高62.4 m。仿真采用的方位角为0°~360°(0°为正对船头方向,顺时针方向为方位角增加方向),掠射角为0°,单次样本按0.1°等方位角间隔产生。雷达参数为中心频率10 GHz,脉冲重复频率为2000 Hz,信号带宽为150 MHz。
按照等间隔角域划分方法以3°间隔对每类目标进行等角域划分,对每类目标每帧范围内分别抽取20个样本作为训练数据。将舰船编队初始方位角为ζ=0°~90°,间隔变化为1°的情况下,舰船编队目标按照式(5)计算得到的方位角度变化作为测试数据。其中设定编队目标的之间的距离D=5km,雷达入射方向相对于舰船航向的方位角β=80°,导弹飞行时间Δt=60 s ,设定SHMM的隐状态个数I的初始值为30。
4.2 基于时频域特征及分层算法的S-STF-HMM实验结果及分析
以编队1为例进行分析,假设T1和T3目标分别为FRA和FRB, T2目标为濒海战斗舰,T4目标为驱逐舰,T5目标为航母。按照4.1节设置的仿真条件,这样训练数据一共包括20×600=12000个 HRRP。按照3.3节分析可知T5目标方位角度变化恒等于0°,因此此处采用SHMM对T5目标进行识别,而对于T1~ T4舰船当方位角变化大于门限值的时候采用STF-HMM模型,小于门限值的时候采用SHMM模型。
对T1~ T5目标HRRP的时频特征识别的混淆矩阵如表1所示。
由表1可知,在针对T1和T3目标时,时域特征的识别效果更好;而针对T2和T4目标时,频域特征的识别效果更好;针对T5目标,时域与频域特征的识别效果相近。因此,为进一步提高编队目标的整体识别率,采用分层识别的方法对上述测试样本重新进行识别[6]。对时域特征判断为T1和T3目标的直接作为识别结果,而判断为T2和T4的目标采用频域特征重新判断,并将新的结果作为最终结果,分层识别结果如表2所示。

表1 基于时频特征识别的S-STF-HMM识别结果(%)
由表2可知分层识别算法进一步提高了编队目标的平均识别率。
4.3 算法运算量分析
仿真实验采用硬件平台CPU主频为3.4 GHz、内存为16 GB的计算机,软件平台是Matlab2009,算法耗时采用cputime函数计算得到。
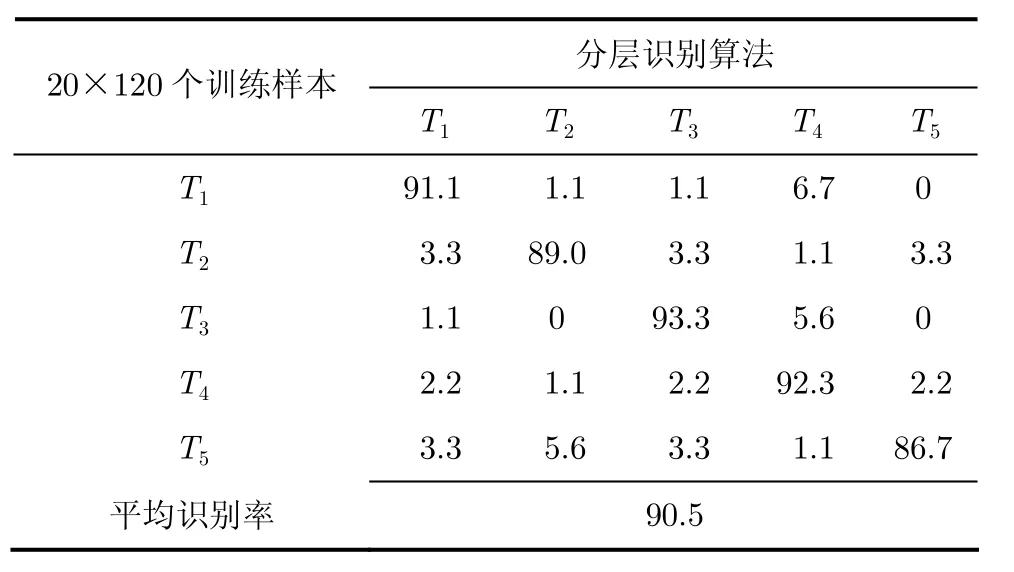
表2 基于分层识别算法的S-STF-HMM识别结果(%)
首先,需要对舰船目标全方位角建立匹配识别时所需要的HMM模型数据库。按照每帧样本数目不同,采用4.3.1节中的仿真算法训练时间如表3所示。t1和t2分别表示基于时域特征和频域特征的SSTF- HMM数据库训练时间。由表3可知,随每帧样本数据增加,训练HMM模型数据库的时间均有所增加,这是因为训练模型时样本数增加会增加算法收敛的迭代时间。对于两种方法在每帧样本数目一致情况下,基于频域特征的S-STF-HMM方法训练时间比基于时域特征的S-STF-HMM方法要少一半,这是因为功率谱是实对称的,可将原特征向量维数降低一半,减少运算量。
基于时域特征的S-STF-HMM方法平均识别时间为0.32 s,基于频域特征的S-STF-HMM方法平均识别时间为0.19 s,基于分层算法的S-STF-HMM方法平均识别时间最长为0.39 s,这是因为识别时进行了二次匹配。基于分层算法的BS-STF-HMM方法平均识别时间最短为0.11 s,这是因为识别时匹配的HMM模型数量相对最小。

表3 基于时域特征和频域特征的S-STF-HMM数据库训练时间(s)
为了验证本文提出的S-STF-HMM识别方法的有效性,通过对海实测数据进行了进一步验证。
4.4 实测实验数据处理及说明
本文通过雷达测量获取一种小型货船和两种大型客船的实测数据,雷达测量系统工作频率为X波段,波形采用线性调频方式,距离分辨率为7.3 m,采样频率为40 MHz。客船1长164 m,宽26 m,吃水深度6 m;客船2长164 m,宽25 m,吃水深度6 m;货船长98 m,宽21 m,吃水深度3.9 m。
文中对3种船型数据的数据是分时录入的。对客船1某两次天线扫描图如图4所示。

图4 客船1某两个时刻的回波扫描图
图4中圆圈所示为本文关注的客船1目标,且随时间推移距离雷达越来越远,方位角也不断发生变化,因此获得的距离像存在距离平移。
通过多次测量和处理同型客船进出港后选取3种船型俯仰角0°、方位角180°~360°的HRRP样本作为测试数据,客船方位角间隔0.5°,货船方位角间隔0.1°,距离单元数均为61。仍按3°间隔建立SHMM模型,其中对客船目标和货船目标每帧范围分别抽取4个和20个样本作为训练数据,建立THMM模型时方位角分别取6°,9°,12°和15°间隔。
为测试方位角范围及建立THMM模型方位角间隔对识别率的影响,选取的样本为3种船型单次进港时俯仰角0°、方位角分别为180°~240°, 240°~300°和300°~360°,方位角采样间隔客船为0.5°,货船为0.1°。分别以6°,9°,12°和15°间隔数据作为3种船型获得的大角域方位角数据间隔,3类目标测试样本处理后总数为630个,同时选取的测试数据基本包含了目标训练时各种方位角的情况。
4.5 实测数据分析
识别实验的平均结果如表4所示。ζ代表测试样本方位角度范围,ε代表方位角数据间隔,P代表固定方位角及固定方位角间隔下3类船型的平均识别率,Pa代表固定方位角及不同方位角间隔下3类船型的平均识别率。由表3可知,随目标方位角间隔增加,识别率呈增加趋势。位于舰船头与尾的平均识别率要高于位于舰船侧翼的识别率,这是因为在位于舰船头部与尾部的方位角度下,舰船距离像长度较长,反映了目标更为精细的结构信息,此时目标之间的可分性较优。
5 结束语
本文针对末制导雷达在搜索目标阶段对编队目标可获得的大角域信息,提出了一种基于时域和频域特征的分层识别S-STF-HMM方法。该方法有效利用目标在小角域范围内空间维上隐含信息及目标在大角域范围内时间维上隐含信息。与对一类目标全方位角训练数据只建立一个THMM的方法相比,本文提出的方法可提高识别性能,通过对5类舰船目标的仿真和3类民用船只的外场实测数据分析表明该方法是有效的。

表4 基于S-STF-HMM模型不同方位角数据间隔下3类船型的平均识别率
[1] Bai Xue-ru, Feng Zhou, and Bao Zheng. High-resolution radar imaging of space targets based on HRRP series[J]. IEEE Transactions on Geoscience and Remote Sensing, 2013, 7(3): 1-13.
[2] 郭尊华, 李达, 张伯彦. 雷达高距离分辨率一维像目标识别[J].系统工程与电子技术, 2013, 35(1): 53-60.
Guo Zun-hua, Li Da, and Zhang Bo-yan. Survey of radar target recognition using one-dimensional high rangeresolution profiles[J]. Systems Engineering and Electronics, 2013, 35(1): 53-60.
[3] Tugac S and Efe M. Radar target detection using hidden markov models[J]. Progress in Electromagnetic Research B, 2012, 43(3): 241-259.
[4] Tugac S and Efe M. Hidden Markov model based target detection[C]. Proceedings of the 13th International Conference on Information Fusion, Edinburgh, England, 2010: 1-7.
[5] 郭武, 朱明明, 杨红兵. 基于隐马尔科夫模型的RCS识别方法研究[J]. 现代雷达, 2013, 35(3): 37-40.
Guo Wu, Zhu Ming-ming, and Yang Hong-bing. A study on RCS recognition method of radar targets based on hidden markov model[J]. Modem Radar, 2013, 35(3): 37-40.
[6] 潘勉, 王鹏辉, 杜兰, 等. 基于TSB-HMM模型的雷达高分辨距离像目标识别方法[J]. 电子与信息学报, 2013, 35(7): 1547-1554.
Pan Mian, Wang Peng-hui, Du Lan, et al.. Radar HRRP target recognition based on truncated stick-breaking hidden Markov model[J]. Journal of Electronics & Information Technology, 2013, 35(7): 1547-1554.
[7] 潘勉. 雷达高分辨距离像目标识别技术研究[D]. [博士论文],西安: 西安电子科技大学, 2013.
Pan Mian. Study on target recognition technology based on high range resolution profile[D]. [Ph.D. dissertation], Xi,an: Xidian University, 2013.
[8] 裴炳南, 保铮. 基于目标散射中心和HMM分类的多视角雷达目标识别方法[J]. 电子学报, 2003, 31(5): 786-789.
Pei Bing-nan and Bao Zheng. Multi-aspect radar target recognition method based on scattering centers and HMMs classifiers[J]. Acta Electronica Sinica, 2003, 31(5): 786-789.
[9] Liao Xue-jun, Paul R, and Lawrence C. Identification of ground targets from sequential high-range-resolution radar signatures[J]. IEEE Transactions on Aerospace and Electronic Systems, 2002, 38(4): 1230-1242.
[10] 张新征, 黄培康. 基于联合时频特征和HMM的多方位SAR目标识别[J]. 系统工程与电子技术, 2010, 32(4): 712-717.
Zhang Xin-zheng and Huang Pei-kang. Multi-aspect SAR target recognition based on combined time-frequency feature and HMM[J]. Systems Engineering and Electronics, 2010, 32(4): 712-717.
[11] 任艳, 杜琳琳, 陈曾平. 基于末制导雷达的海面舰船ISAR成像转角分析[J]. 宇航学报, 2011, 32(2): 401-406.
Ren Yan, Du Lin-lin, and Chen Zeng-ping. Analysis of rotation angle condition in ship target ISAR imaging based on terminally guided missile-borne radar[J]. Journal of Astronautics, 2011, 32(2): 401-406.
[12] Du Lan, Wang Peng-hui, and Liu Hong-wei. Bayesian spatiotemporal multitask learning for radar HRRP target recognition[J]. IEEE Transactions on Signal Processing, 2011, 59(7): 3182-3196.
[13] 刘伶俐, 王朝立, 于震. CHMM语音识别初值选择方法的研究[J]. 上海理工大学学报, 2012, 34(4): 323-326.
Liu Ling-li, Wang Chao-li, and Yu Zhen. Study of initial value selection method for speech recognition based on continuous hidden markov models[J]. Journal of University of Shanghai for Science and Technology, 2012, 34(4): 323-326.
但 波: 男,1985年生,博士生,研究方向为反舰导弹目标识别与选择技术.
姜永华: 男,1957年生,硕士,教授,研究方向为精确制导技术.
李敬军: 男,1982年生,博士生,研究方向为雷达信号设计与处理.
卢 毅: 男,1981年生,博士生,工程师,研究方向为目标识别与选择技术.
Ship Formation Target Recognition Based on Spatial and Temporal Fusion Hidden Markov Model
Dan Bo①Jiang Yong-hua①Li Jing-jun①Lu Yi②
①(Department of Electronic Information Engineering, Naval Aeronautical and Astronautical University, Yantai 264001, China)
②(Navy Armament Department, Chengdu 610100, China)
Based on the target large angle domain High Resolution Range Profile (HRRP) information of the ship formation obtained by the terminal guidance radar during its search phase, this study establishes an “ergodic”Spatial Hidden Markov Model (SHMM) which describes statistical relationship between the vectors in a single HRRP sample and a “left to right” Temporal HMM (THMM) which describes statistical relationship between HRRP samples. In comparison with the method that it only establishes a THMM model with the training data of all-round angle of one target, the proposed method makes full use of the target HRRP information of large angle domain and can improve the recognition performance. Through the simulation of the five types of ship target and the field measured data analysis of three kinds of civilian vessels show that the effectiveness of the proposed method.
Radar High Resolution Range Profile (HRRP); Spatial Hidden Markov Model (SHMM); Temporal Hidden Markov Model (THMM); Formation target recognition
TN957.51
: A
:1009-5896(2015)04-0926-07
10.11999/JEIT140589
2014-05-08收到,2014-09-12改回
上海市科学技术委员会资助课题(11DZ2260800)和省部级基金资助课题
*通信作者:但波 lovelyn19841204@163.com
