四旋翼姿态解算算法的对比与研究
2015-07-07王晓初
王晓初,卢 琛
(广东工业大学 机电工程学院,广州 510006)
0 引言
在捷联式惯性导航中,飞行器的姿态是机体坐标系相对于导航坐标系决定的,而描述这种坐标系的关系可以分为三类,有三参数法、四参数法和九参数法。其中三参数法也叫欧拉角法,四参数法有四元数,九参数法为方向余弦[4]。
利用惯性元件,对飞行器的姿态的解算,是捷联式惯性导航的关键。文献[6]从信号的频域出发,给出了基于互补滤波器的解算算法。文献[2]结合卡尔曼滤波器,给出了基于状态空间的最优解算法。文献[7]采用梯度下降为修正准则,给出了偏差沿梯度负方向修正算法。文献[5]则结合梯度下降与互补滤波器,吸收了各自的优点。本文针对这几种常见的姿态解算算法,从设计准则与实际应用出发,对比分析了各自算法的特点与相似之处。
1 姿态的更新算法
姿态的更新常采用如下流程,将角速度向量[ω]带入四元数微分方程并求解,即可更新四元数[q]。
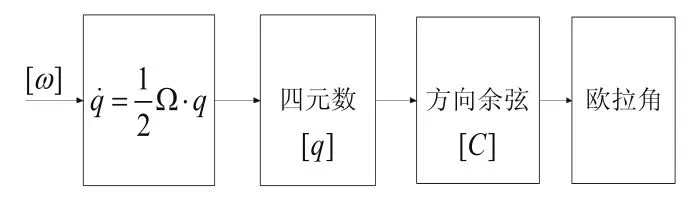
图1 姿态解算流程
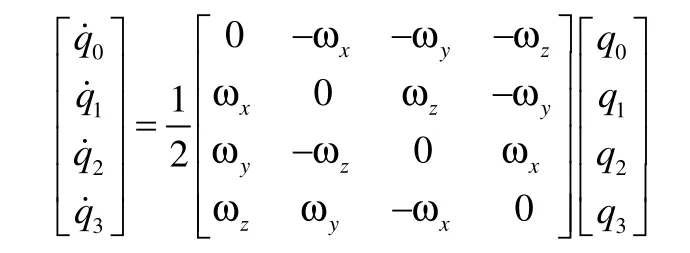
四元数微分方程为:

其中,四元数q定义为:q=q0+q1i+q2j+q3k。
写成矩阵形式为:
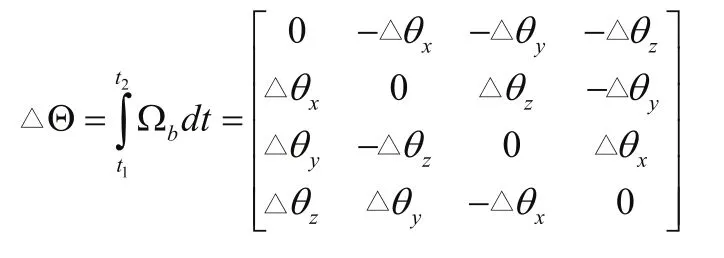
用角增量算法求解微分方程迭代格式为:
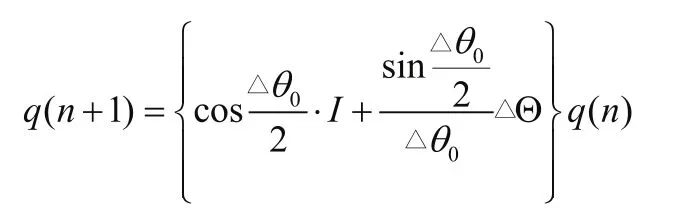
其中:
将cos和sin泰勒展开,取一阶近似有:

采用式(2)即可更新四元数,但是直接使用四元数不利于PID控制,还需利用方向余弦矩阵[C]将四元数转变为欧拉角。
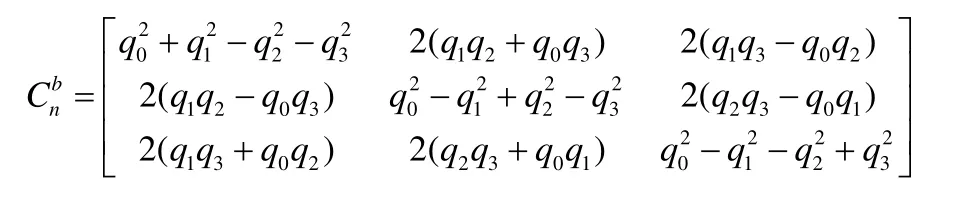
方向余弦矩阵也称作坐标变换矩阵,是导航坐标系[Xn]到运载体坐标系[Xb]的变换矩阵,有并且方向余弦有两种表示方法,分别为为四元数表出和欧拉角表出,并且两种表出矩阵在同一坐标系下是等价的[1]。
四元数表示方向余弦为[1]:
另外,欧拉角表出方向余弦为[1]:
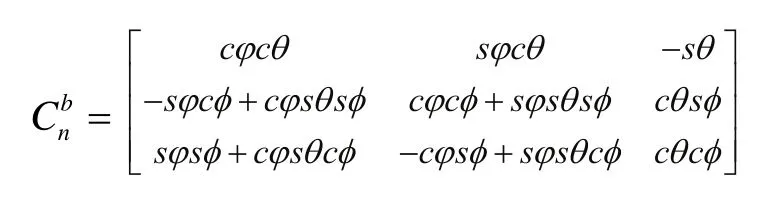
其中c和s分别代表cos和sin,ϕ、θ和φ分别代表欧拉角中的航向角,俯仰角和横滚角[1]。如果已知方向余弦,可以由下列公式求得对应的欧拉角:
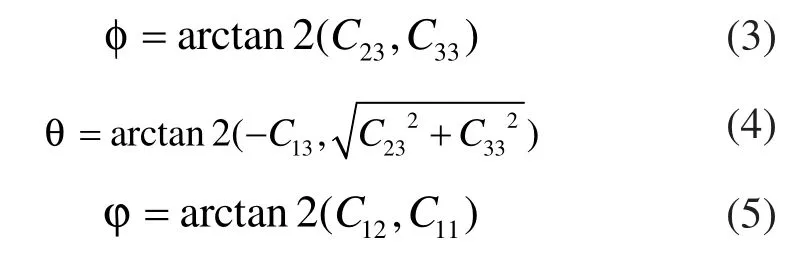
如图1所示,式(2)给出了四元数法的更新迭代格式,更新四元数后即可求得方向余弦,由式(3)~式(5)便可求得到更新之后的欧拉角。
但是整个过程是建立在对角速度的积分,由于字长丢失精度会导致积分误差,且误差会随着时间的延长而加大。所以需要组合加速度传感器来修正姿态矩阵,使误差项逐步减小,最终消除。常用的组合算法有互补滤波算法、梯度下降算法和卡尔曼滤波算法等。
2 常见组合算法的特点
姿态解算算法可以用图2表示,其中由式(2)更新的姿态为qg,它是整个姿态估计q的基础。
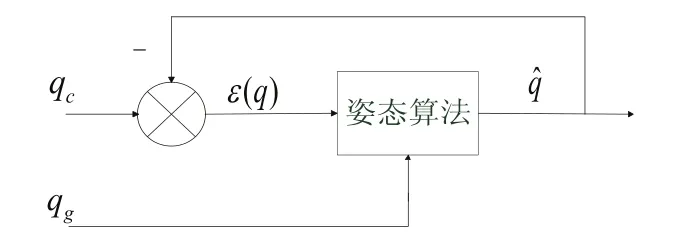
图2 姿态解算算法流程
因为积分误差的存在,所以需结合加速度计的输出qc构成修正偏差ε(q),然后以不同的设计准则构成算法修正qg,即可得到在特定评判标准下的最优估计姿态q。
2.1 以高通和低通滤波器为修正算法
陀螺仪动态响应特性好,但会产生积分误差。加速度传感器测量姿态没有积分误差,但是动态响应较差。它们在频域上的特性形成互补,从而提高测量精度和系统的动态性能[3]。
如图3所示[6],表示互补滤波器的输出姿态矩阵,代表载体坐标下的测量加速度单位向量,代表在惯性坐标系下的重力场向量,设。
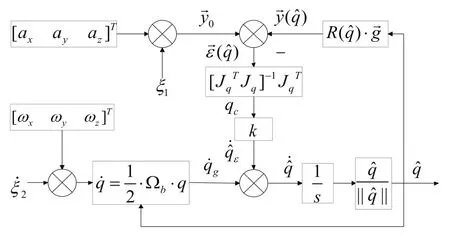
图3 互补滤波器模型
其中误差向量定义为:


则整个互补滤波器的估计输出为:

如图3所示,令ξ1为加速度计测量噪声,为陀螺仪测量噪声,则噪声传递函数为:
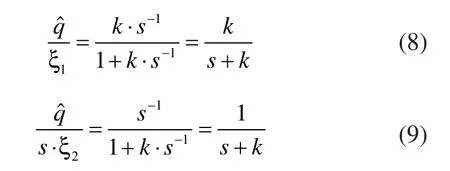
式(8)和式(9)可以用来设计k的取值,从而确定互补滤波器的截止频率在大于fτ的高频段,陀螺仪对解算起主要作用,反之,加速度对解算起主要作用[3]。
2.2 以偏差函数梯度负方向为修正准则
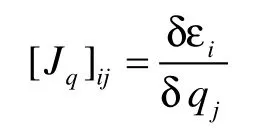
使用式(6)为目标函数,则有梯度:

这样就可以通过下列公式进行修正:
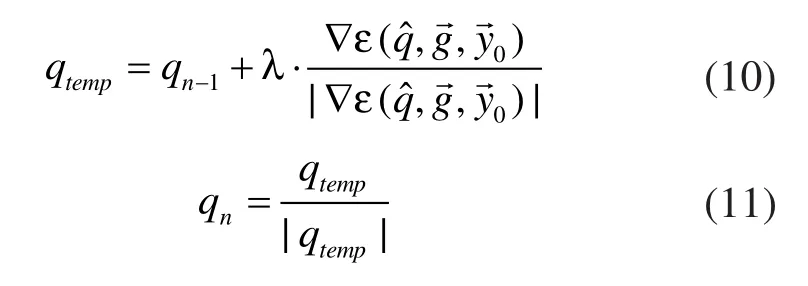
式(10)、式(11)即为梯度下降迭代格式,其中步长λ用来限制偏差收敛速度,但过大的步长可能会导致估计不准确[5]。
2.3 以卡尔曼滤波器为基础的修正算法
卡尔曼滤波器以状态空间为基础,把信号过程看做在白噪声作用下的线性输出[5],
算法表述为:最优值=预测值+kg.修正量,其中kg为动态调整增益。
考虑如下线性系统离散模型:
其中X(k)是系统的状态向量,A是状态转移矩阵,B是控制输入矩阵,u(k-1)是控制输入向量,Q是过程噪声协方差矩阵,Z(k)是系统的观测向量,H是观测向量,R是观测噪声协方差矩阵。
使用陀螺仪数据qg和ε(q)建立时间传递模型如下:

取:
可以得到状态矩阵方程[2]:
则卡尔曼滤波算法实现步骤为:
根据时间传递方程(12)预测k时刻的输出:

其中X(k- 1 |k- 1 )为上一时刻的最优输出。
计算k时刻预测输出协方差矩阵:

更新k时刻修正增益矩阵:

根据观测方程(13)修正预测矩阵:

更新最优预测输出的协方差矩阵:

3 实验分析
互补滤波最为简单,基于高通与低通滤波器,构成设计准则来修正姿态;梯度下降则以偏差函数的负梯度为校正准则,使其以最快下降方向进行校正;卡尔曼滤波以状态空间为基础,从时间传递方程和测量方程出发,得出考虑各种随机误差在内的最佳线性估计,如图4所示,为实时角度采样输出。
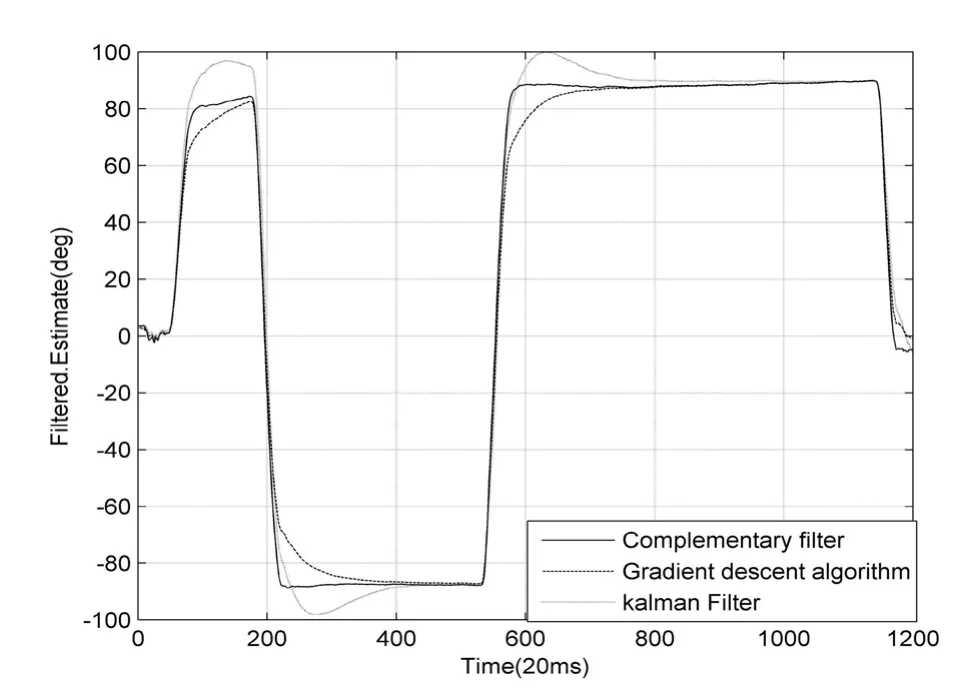
图4 三种算法输出对比
从图中可以看到,当姿态在迅速变化时,三种算法的估计输出几乎重叠在一起,此时陀螺仪对姿态更新起主导作用,加速度的修正效果可以忽略。在姿态变化较为平缓阶段,三种算法对姿态修正的差异才凸显出来,这也体现了在不同修正准则下的输出差异,但最终估计输出都会收敛于某一稳定值。
[1]高钟毓.惯性导航系统技术[M].北京:清华大学出版社,2012.
[2]王帅,魏国.卡尔曼滤波在四旋翼飞行器姿态测量中的应用[J].兵工自动化,2011,01:73-74,80.
[3]梁延德,程敏,何福本,李航.基于互补滤波器的四旋翼飞行器姿态解算[J].传感器与微系统,2011,11:56-58,61.
[4]胡庆.基于STM32单片机的无人机飞行控制系统设计[D].南京航空航天大学,2012.
[5]谭广超.四旋翼飞行器姿态控制系统的设计与实现[D].大连理工大学,2013.
[6]Bachmann, E.R., et al.“Orientation tracking for humans and robots using inertial sensors.” Computational Intelligence in Robotics and Automation, 1999.CIRA’99.Proceedings.1999 IEEE International Symposium on.IEEE,1999.
[7]Madgwick,Sebastian OH,Andrew JL Harrison, and Ravi Vaidyanathan.“Estimation of IMU and MARG orientation using a gradient descent algorithm.”Rehabilitation Robotics (ICORR), 2011 IEEE International Conference on.IEEE, 2011.
[8]Fresk, Emil,and George Nikolakopoulos.“Full quaternion based attitude control for a quadrotor.” Control Conference (ECC),2013 European.IEEE,2013.
