基于道路信息的知识辅助空时自适应处理
2015-07-05吴亿锋彤吴建新代保全同亚龙
吴亿锋 王 彤吴建新 代保全 同亚龙
(西安电子科技大学雷达信号处理国家重点实验室 西安 710071)
基于道路信息的知识辅助空时自适应处理
吴亿锋 王 彤*吴建新 代保全 同亚龙
(西安电子科技大学雷达信号处理国家重点实验室 西安 710071)
主波束中的车辆回波信号会污染空时自适应处理(STAP)的训练样本,导致空时自适应处理时的目标自相消,引起漏警。针对这一问题,该文提出一种基于道路信息的知识辅助(KA)空时自适应处理方法。该方法首先根据主波束中道路相对于雷达的位置估计道路上车辆相对于雷达的径向速度,然后得到可能含有主波束车辆回波信号的距离-多普勒单元,接着根据训练样本与杂波导向矢量和主波束导向矢量的匹配程度判断这些训练样本是否包含主波束车辆回波信号,最后在进行空时自适应处理估计杂波协方差矩阵时剔除被主波束车辆回波信号污染的训练样本。理论分析及实验结果表明该方法可以提高道路密集环境中空时自适应处理的信杂噪比输出,改善空时自适应处理雷达的性能。
空时自适应处理;知识辅助;道路信息;目标自相消
1 引言
空时自适应处理(Space Time Adaptive Processing, STAP)需要杂波的协方差矩阵来计算自适应权值,该矩阵通常是未知的,需要通过训练样本估计得到[1]。为了估计杂波的协方差矩阵,经典的滑窗法[2]通常选择待处理单元附近的距离采样数据作为训练样本。例如,如果需要0L个训练样本,那么在检测单元前后(为了防止目标自相消和目标信号在距离维的扩展,需要剔除待处理单元及其附近的若干保护单元)各选择0/2L个训练样本来估计杂波的协方差矩阵。此时,假设这种使用滑窗方法挑选出的训练样本能够代表待处理单元的杂波。然而,在非均匀杂波环境中,这种假设是不成立的。为了保证所估计的杂波协方差矩阵的性能,训练样本的数量要大于系统自由度的2倍[3]。根据雷达系统参数和距离分辨率可以得知,训练样本数据所跨越的地面长度可长达数百米甚至数千米。雷达工作的范围如此之大以至于环境中存在的离散杂波点、功率非均匀性以及海陆交界等地形差异使得不同距离门的杂波具有不同的统计特性[45],,用滑窗法挑选出的训练样本与待处理单元的杂波统计特性并不一定相同,由此估计的协方差矩阵与待处理单元的实际的杂波协方差矩阵存在偏差,此时空时自适应处理抑制杂波的性能会下降;当训练样本中含有目标信号时,所估计的杂波协方差矩阵中包含目标信号(称为奇异样本),由此得到的自适应权值进行STAP时会造成目标相消[6-8],引起漏警。
为了防止STAP时目标自相消现象的发生,在估计杂波协方差矩阵的时候必须剔除被目标信号污染的训练样本。一些学者提出了基于先验知识的STAP[9-11],用已有的雷达数据、地图数据和道路信息等来辅助空时自适应信号处理,取得了不错的效果,证明了先验知识在STAP中的价值。主波束内道路上的车辆回波信号与目标信号具有相似的形式,如果用含有这种车辆回波信号的训练样本来估计杂波协方差矩阵,STAP时会造成目标自相消[9]。文献
[9]将所有包含道路的距离单元剔除,可以在一定程度上改进STAP性能,然而这种方法在道路密集的环境中会剔除大量训练样本,从而导致STAP的训练样本不足而使其性能下降[12]。
针对文献[9]的不足,本文提出了一种改进的基于道路信息的STAP算法,根据道路信息剔除被主波束内车辆回波信号污染的训练样本。道路上存在许多运动目标,雷达主波束中的车辆相对于雷达的多普勒频率有可能与待处理单元中目标的多普勒频率相同,那么车辆与待处理单元中所要检测的真实目标具有相同的空时导向矢量,这样,在空时自适应处理估计协方差矩阵时如果训练样本中含有主波束的车辆回波信号,就相当于训练样本中含有目标信号,所求得的自适应权值作用于待处理单元时就会造成目标相消而使其性能下降,所以空时自适应处理估计协方差矩阵挑选训练样本时剔除主波束内车辆回波所在的距离门可以提高STAP的性能。为了防止训练样本过度剔除问题,本文根据一定的准则判断训练样本是否被主波束内车辆回波信号污染,进而由此剔除被主波束车辆回波信号污染的训练样本。
本文算法首先根据雷达构型、惯导信息及道路网信息计算雷达主波束内道路所在的距离-多普勒单元;然后根据道路相对于雷达的角度和车辆的速度范围计算出道路上车辆相对于雷达的径向速度范围,从而得到可能包含主波束车辆回波信号的距离-多普勒单元;接着,对于某待处理单元,在其相同多普勒通道中挑选与其临近的距离单元(剔除保护单元)作为原始训练样本,根据原始训练样本数据矢量与杂波导向矢量及道路导向矢量的匹配程度判断其是否为车辆回波,从而剔除被主波束车辆回波信号污染的原始训练样本;最后,用挑选出的训练样本计算自适应权值进行STAP。
2 信号模型
以机载正侧视均匀线阵雷达为例进行分析,假设该雷达包含N个间距为d的阵元,雷达与杂波散射点的几何关系如图1所示。载机的速度v平行于地面沿X轴正方向,雷达轴向与载机速度平行,杂波散射点相对于雷达的俯仰角、方位角和直线距离分别为φ,θ和lR。
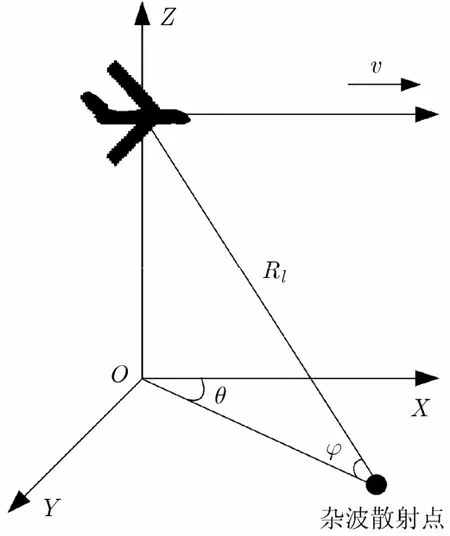
图1 雷达与杂波散射点的几何关系图
N个阵元在第l个距离门所接收到的M个脉冲回波数据矩阵可表示为

式中Cl和Nl分别为杂波和噪声信号,ρl为目标幅度,目标空时导向矢量S=b(ϖ)aT(υ),其中⊗表示Kronecker积,(⋅)T表示转置运算符。

为归一化空间频率等于υ的空域导向矢量,

为归一化多普勒频率等于ϖ的时域导向矢量。
杂波信号可表示为

其中rN为距离模糊次数,cN为每个距离门划分的杂波散射点的个数,ikla,iklb和iklρ分别为第i次距离模糊在第l个距离门的第k个杂波块对应的空域导向矢量、时域导向矢量和回波复幅度,具有形式为

式中


分别为第i次距离模糊在第l个距离门的第k个杂波块对应的归一化空域频率和归一化多普勒频率,ilkφ和iklθ分别为对应的俯仰角和锥角,λ和rf分别为雷达发射波长和脉冲重复频率。
3 基于道路信息的STAP
3.1 问题描述
全空时自适应处理由于计算量大并且所需的训练样本较多,在实际应用中通常是不可行的,实际应用中经常采用降维的空时自适应处理。本文以常用的因子方法(Factor Approach, FA)[13]方法为例进行分析。首先将阵元脉冲域数据lX通过MM×的傅里叶变换矩阵F转换到阵元多普勒域:



式中μ表示归一化系数,subR表示待处理单元的杂波协方差矩阵,在实际处理中是通过其周围具有独立同分布的训练样本估计得到的。如果挑选的训练样本含有目标信号,由此计算的自适应权值进行STAP时会造成目标相消,降低STAP的性能。
针对以上问题,本文根据先验的道路信息剔除可能被目标污染的训练样本。为了描述方便,本文以多通道机载雷达测量(Multi-Channel Airborne Radar Measurement, MCARM)数据[15]为例进行分析。MCARM数据是由工作于L波段的2行11列的机载相控阵雷达(为减小运算量和所需的训练样本个数,本文仅采用上面一行的阵元)录取的,一个相干处理间隔内具有128个脉冲。本文所用的MCARM数据的录取环境如图2所示。由图2可以看出雷达工作区域内有很多道路,由于道路上的车辆可能会引起STAP时目标自相消现象的发生,所以本文根据训练样本中是否包含主波束内的车辆回波信号挑选训练样本。
3.2 雷达信号与道路的配准
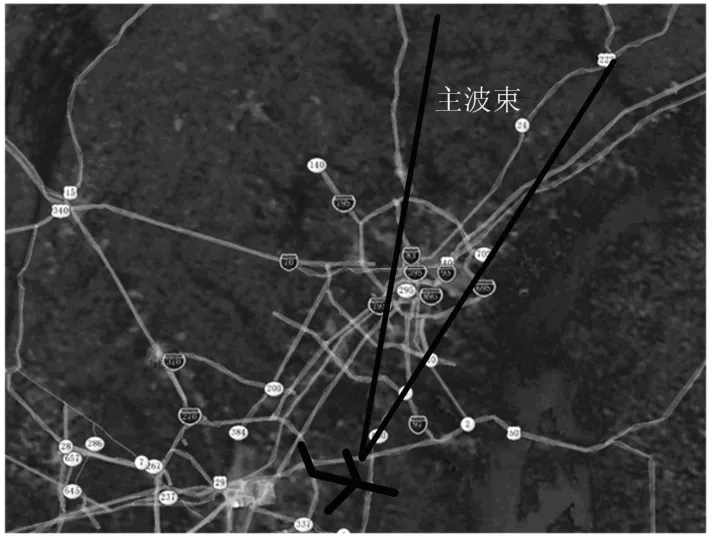
图2 MCARM数据的录取环境及其内的道路信息
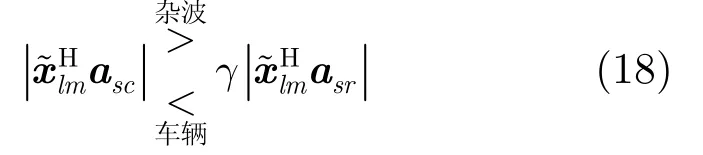
由于本文中所用雷达数据的照射区域是相对平整的(最高点和最低点的高程差小于90 m)并且非常接近于水平面,所以本文假设地面处于同一海拔高度。根据雷达系统参数及惯导信息,可以计算雷达照射范围对应的经纬度,文献[11]详细介绍了该过程,本文就不再赘述。在地形高度变化很大的情况下,配准方程要用数字高程数据进行校正才能进行配准。通过谷歌地图可以获得道路采样的经纬度信息。雷达的照射范围及其内的道路信息如图3所示,灰色区域表示雷达照射范围,黑色的线条表示该区域的道路。
3.3 剔除被主波束车辆回波信号污染的训练样本
高速公路上存在车辆,车辆的运动会引起多普勒频率的变化,主波束照射区域内道路上的车辆有可能与目标具有相同的多普勒频率,如果用含有这种车辆回波信号的训练样本来估计杂波协方差矩阵,就相当于在协方差矩阵中加入了目标信号分量,STAP时会造成目标相消,降低实际目标的功率,因此,在挑选训练样本估计杂波协方差矩阵时需要剔除这种被主波束内车辆回波信号污染的训练样本。根据第3.2节雷达信号与道路的配准方法,将雷达照射区域内的道路转换到距离-多普勒域,如图4所示。根据雷达系统参数可计算出道路对应的距离-多普勒单元的集合记为RDroa。
道路上的车辆具有速度,其相对于雷达会有一定的多普勒频移,假设车辆的速度vc∈[60~120] km/h,由车辆相对于雷达运动而引起的多普勒通道偏移:

式中θc为车辆速度与雷达下视点(雷达下方的地表点)连线的夹角,φc为雷达相对于车辆的俯仰角,可通过车辆相对于雷达的距离确定。因为车辆一般沿着道路行驶,所以本文认为车辆速度方向与其所在道路的走向平行,从而可以通过道路走向及其相对于雷达的方位确定θc。本文中一个距离多普勒单元中含有十几个道路采样点,通过计算相邻两个采样点连线与采样点-雷达下视点连线的夹角并取平均值,得到该距离多普勒单元对应的θc。车辆的运动使得其回波信号发生多普勒频率偏移,假设道路上布满速度为vc的车辆,对应于RDroa的车辆所在的距离-多普勒单元集合记为RDveh,其如图5所示。
本文通过式(13)-式(18)判断训练样本是否被主波束内车辆回波信号污染。图1中静止的地面散射点的归一化多普勒频率为

归一化空间频率为

从而可得

从式(15)可以看出,在多普勒频率不模糊的情况下不同的多普勒通道的杂波对应的归一化空间频率不同。对于第m个多普勒通道,由傅里叶变换的性质可知该通道对应的归一化多普勒频率为(1)m-/0.5M-,从而得到该多普勒通道中相对于地面静止的杂波块对应的空域导向矢量为
由于道路上的车辆是运动的,车辆的运动引起多普勒频率偏移。假设车辆的归一化多普勒频率为(m-1)/M-0.5,根据RDroa与RDveh的对应关系可以查找到该车辆所在道路的回波信号所在的多普勒通道,假设为第m1个多普勒通道,则其归一化多普勒频率为(m1-1)/M-0.5,那么该道路的空域导向矢量为asr。
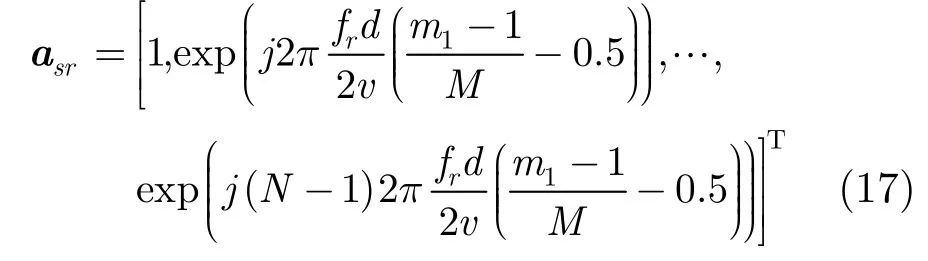
道路的回波信号和其上车辆的回波信号具有相同的空域导向矢量;车辆的回波信号与其所在多普勒通道相对地面静止的杂波具有不同的空域导向矢量,可根据这一不同点判断训练样本是否被主波束车辆回波信号污染,本文根据与sca和sra的匹配程度判定
式中γ为调解匹配程度的判别系数。如果判定lmx~为车辆,则将其从训练样本集合中剔除,反之则保留。由此就完成了剔除被主波束车辆回波信号污染的训练样本的过程。需要注意的是RDveh中的一个距离多普勒单元有可能对应RDroa中的多个距离多普勒单元,在这种情况下需要对其所对应的多个距离-多普勒单元做式(18)的判定处理;当存在多普勒模糊时,一个多普勒通道的静止地面杂波对应多个空域导向矢量,此时需要计算与多个导向矢量的匹配程度。
综上所述,基于道路信息的知识辅助(Knowledge Aided, KA) STAP流程图如图6所示,具体步骤为:
步骤1 将雷达回波数据在脉冲域做FFT变换,得到多普勒域的雷达回波数据;根据公路信息、雷达系统参数和惯导信息等计算雷达主波束内公路所在的距离-多普勒单元的集合RDroa,并计算公路上对应的车辆回波信号所在的距离-多普勒单元集合RDveh。
步骤2 对于某待处理单元,从其附近距离挑选原始训练样本,并记所挑选原始样本距离门的集合为Ω。由于脉冲压缩存在旁瓣,与待处理单元临近距离门的训练样本中可能含有目标信号通过脉冲压缩旁瓣泄露的能量,在挑选原始训练样本时要把待处理单元周围的若干保护单元剔除,以防目标自相消现象的发生。
步骤3 从原始训练样本集合中挑选有可能被主波束车辆回波信号污染的训练样本。如果步骤2中挑选的原始训练样本属于RDveh,则这些样本就是有可能被主波束车辆回波信号污染的训练样本。
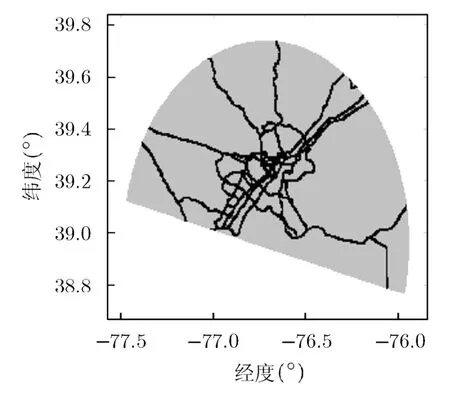
图3 雷达照射范围及其内的道路信息
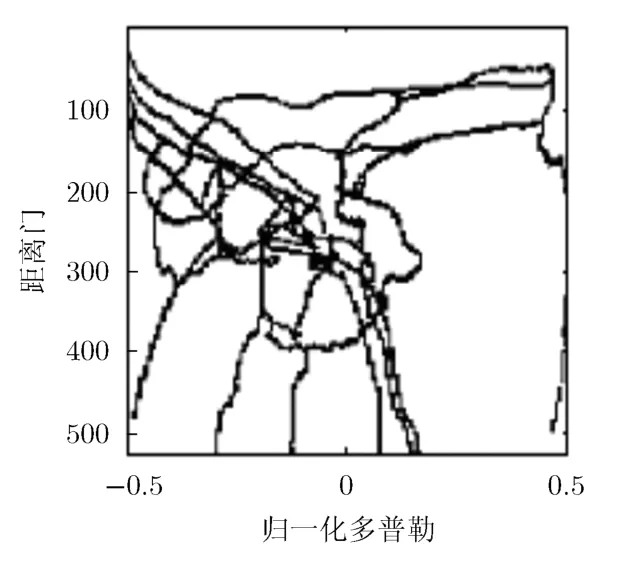
图4 雷达照射区域内高速公路对应的距离-多普勒图
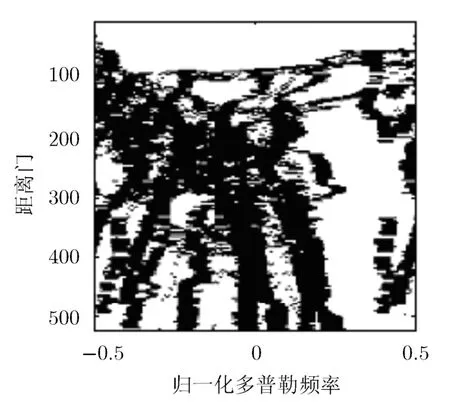
图5 车辆多普勒频率偏移后对 应的距离多普勒单元
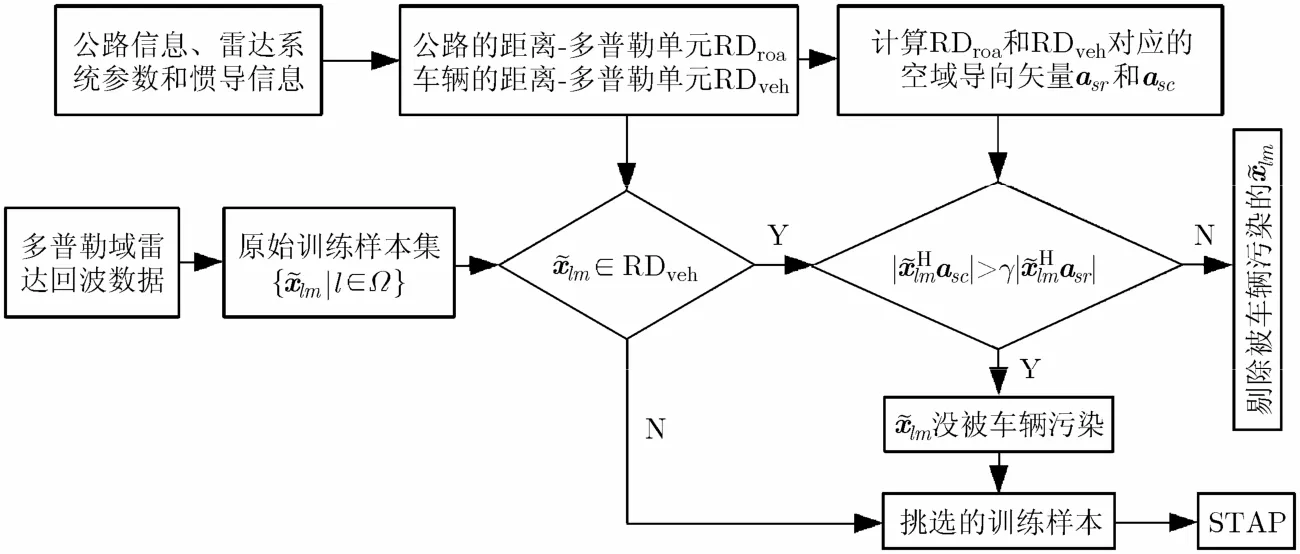
图6 基于道路信息的知识辅助STAP流程图
步骤4 判断步骤3中挑选出来的训练样本是否被主波束车辆回波信号污染。以步骤3挑出的某一样本x~lm∈RDveh为例进行分析,根据式(15)由样本的多普勒频率确定其空间频率,并由此得到该多普勒通道的地面杂波的空域导向矢量asc;根据步骤1中的计算,查找训练样本对应在RDroa中的道路所在距离-多普勒单元,并由该单元的多普勒频率确定道路的空域导向矢量asr;根据x~lm与asc和asr的匹配程度,由式(18)判断训练样本是否被车辆回波信号污染。
步骤5 将被车辆回波信号污染的训练样本从原始训练样本中剔除,用剩余的训练样本估计待处理单元的杂波协方差矩阵,并对待处理单元进行STAP。
步骤 6 对所有的待处理单元进行步骤2~步骤5的处理,由此就完成了基于道路信息的知识辅助STAP。
4 实验结果
为说明本文所提算法的性能,本节将所提方法挑选训练样本的实验结果与滑窗法挑选训练样本的实验结果加以对比。所有的训练样本都是从对应于待处理单元的多普勒通道挑选的。需要注意的是:在不包含主波束车辆回波信号的区域,本文所提方法与滑窗法的效果相同,两者挑选出的训练样本是一样的。
在第360号距离门注入一个归一化多普勒频率为0.1094的仿真目标。图7画出了目标所在多普勒通道经FA处理后的功率剩余。本文采用输出的信号功率与杂波加噪声功率之比作为性能评价指标,记为SCNRout,其中,输出的杂波加噪声功率是通过距离平均得到的。由图7可以看出滑窗STAP的目标功率为-58.2 dB,本文所提方法的目标功率为-55.0 dB,也就是说本文所提方法相对于滑窗STAP使得目标功率改善了3.2 dB。这是因为滑窗STAP所用训练样本中有可能包含被车辆回波信号污染的训练样本,在进行STAP时会引起目标自相消现象的发生,而本文方法剔除了被车辆回波信号污染的训练样本,因此可以克服由车辆回波信号引起的目标自相消现象的发生,从而改善目标输出功率。另外,从图7中可以看出滑窗STAP在无目标距离单元的杂波噪声功率平均值为-90.1 dB,本文方法在无目标距离单元的杂波噪声功率平均值为-92.6 dB,也就是说本文方法可以更好地抑制杂波。这是由于滑窗STAP在估计杂波协方差矩阵时所用训练样本有可能被车辆回波信号污染,其估计的杂波协方差矩阵不准确;本文方法在估计杂波协方差矩阵的时候剔除被车辆污染的训练样本,从而可以比传统的滑窗STAP更精确地估计杂波的协方差矩阵,因此可以更好地抑制杂波,所以本文方法对无目标距离单元的杂波抑制性能有改善。实验结果中滑窗法的SCNRout=31.9dB ,本文算法的SCNRout= 37.6dB,本文方法输出信杂噪比要比滑窗法的结果高5.7dB,说明本文方法可以提高输出信杂噪比,改善STAP的性能。
式(18)中的γ值的大小影响系统对车辆回波信号的敏感程度,可根据车辆回波对训练样本的污染程度设定。γ值越大则系统对车辆污染信号越敏感,所剔除的训练样本就越多。在实际处理中,如果训练样本与asc的匹配程度大于训练样本与asr的匹配程度,即,则该训练样本中车辆回波信号占相对弱势,通过多个训练样本平均后所估计的杂波协方差矩阵中车辆回波信号更弱,因此在估计杂波协方差矩阵时可以不用剔除,本实验中取γ=1。
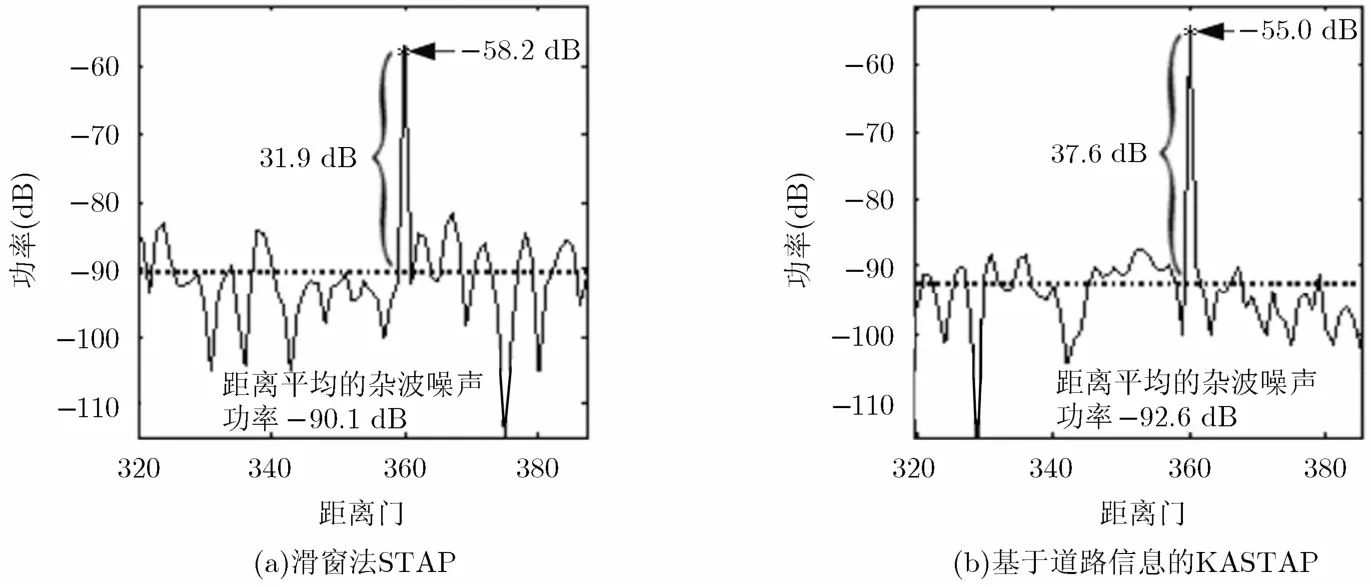
图7 STAP后的杂波剩余图
需要注意的是,公路信息要与雷达回波数据匹配才能取得较好的性能改进,但是实际处理中多种因素会引起公路信息与雷达回波信号的失配(例如公路信息过于陈旧而使得公路信息有变动,或者公路信息投影到雷达距离-多普勒单元时的不准确以及雷达惯导信息的不准确等),如果公路信息与雷达回波数据失配则不能有效剔除雷达回波数据中被车辆回波信号污染的训练样本,进而不能改进系统性能。
5 结束语
本文展示了一种利用先验道路信息改进STAP性能的方法,解决了文献[9]中所提方法在道路密集环境中训练样本不足的问题。根据道路信息剔除被主波束车辆回波信号污染的训练样本,可以防止空时自适应处理时目标自相消现象的发生,从而改进雷达信号处理性能。为说明本方法性能,我们将本文所提方法与经典的滑窗方法挑选训练样本进行了对比。实验结果表明本文所提方法可以明显改进空时自适应处理的性能。
[1] Herbert G M. Clutter modelling for space-time adaptive processing in airborne radar[J]. IET Radar, Sonar & Navigation, 2010, 4(2): 178-186.
[2] 吴建新, 王彤, 索志勇, 等. 空时自适应处理的滑窗递推 QR算法[J]. 电子与信息学报, 2008, 30(10): 2338-2342.
[3] Reed I S, Mallett J D, and Brennan L E. Rapid convergence rate in adaptive arrays[J]. IEEE Transactions on Aerospace and Electronic Systems, 1974, (6): 853-863.
[4] Xiang D, Tang T, Zhao L, et al.. Superpixel generating algorithm based on pixel intensity and location similarity for SAR image classification[J]. IEEE Geoscience and Remote Sensing Letters, 2013, 10(6): 114-118.
[5] 尚秀芹, 宋红军, 陈倩, 等. 非均匀环境中分布目标的参量广义似然比检测[J]. 电子与信息学报, 2012, 34(1): 128-133.
[6] 许京伟, 廖桂生, 朱圣棋, 等. 前视阵高速雷达空时处理方法研究[J]. 电子与信息学报, 2013, 35(3): 509-515.
Xu Jing-wei, Liao Gui-sheng, Zhu Sheng-qi, et al.. Research on STAP approach of forward looking array radar with high-velocity[J]. Journal of Electronics & Information Technology, 2013, 35(3): 509-515.
[7] 郭佳佳, 廖桂生, 杨志伟, 等. 利用广义内积值迭代加权的空时协方差矩阵估计方法[J]. 电子与信息学报, 2014, 36(2): 422-427.
Guo Jia-jia, Liao Gui-sheng, Yang Zhi-wei, et al.. Iterative weighted covariance matrix estimation method for STAP based on generalized inner products[J]. Journal of Electronics & Information Technology, 2014, 36(2): 422-427.
[8] Cristallini D and Burger W. A robust direct data domain approach for STAP[J]. IEEE Transactions on Signal Processing, 2012, 60(3): 1283-1294.
[9] Guerci J R and Baranoski E J. Knowledge-aided adaptive radar at DARPA: an overview[J]. IEEE Signal Processing Magazine, 2006, 23(1): 41-50.
[10] Tang B, Zhang Y, Tang J, et al.. Close form maximum likelihood covariance matrix estimation under a knowledgeaided constraint[J]. IET Radar, Sonar & Navigation, 2013, 7(8): 904-913.
[11] Christopher T C, Gerard T C, Ivan B, et al.. Implementing digital terrain data in knowledge-aided space-time adaptive processing[J]. IEEE Transactions on Aerospace and Electronic Systems, 2006, 42(3): 1080-1099.
[12] Ginolhac G, Forster P, Pascal F, et al.. Performance of two low-rank STAP filters in a heterogeneous noise[J]. IEEE Transactions on Signal Processing, 2013, 61(1): 57-61.
[13] Dipietro R. Extended factored space-time processing for airborne radar system[C]. Proceedings of the 26th Asilomar Conference on Signals, Systems and Computing, Pacific Grove, United States, 1992: 425-430.
[14] Ward J. Space-time adaptive processing for airborne radar [R]. Lincoln Lab., MIT, Lexington, MA, 1994.
[15] Suresh Babu B N, Torres J A, and Melvin W L. Processing and evaluation of multichannel airborne radar measurements (MCARM) measured data[C]. Proceedings of the IEEE International Symposium on Phased Array Systems and Technology, United States, 1996: 395-399.
吴亿锋: 男,1988年生,博士生,研究方向为空时自适应信号处理和阵列信号处理.
王 彤: 男,1974年生,博士,教授,研究方向为信号与信息处理、特别是阵列信号处理、空时自适应信号处理、雷达成像和动目标检测等.
吴建新: 男,1982年生,博士,副教授,研究方向为动目标检测和自适应信号处理.
A Knowledge Aided Space Time Adaptive Processing Based on Road Network Data
Wu Yi-feng Wang Tong Wu Jian-xin Dai Bao-quan Tong Ya-long
(National Laboratory of Radar Signal Processing, Xidian University, Xi’an 710071, China)
The echo of the vehicle from the main lobe may contaminate the training samples of Space Time Adaptive Processing (STAP), which results in target self nulling effect, and therefore degrades the probability of detection. To mitigate this problem, this paper proposes a Knowledge Aided (KA) STAP which is based on the road network data to select the training samples. This study firstly estimates the radial velocity of vehicle to the radar; then the range-Doppler cells which may contain vehicle echo are obtained according to the velocity; in the following, this study distinguish whether the training samples contain vehicle echo according to the matching degree of the training samples with the steering vector of the main lobe and the clutter; finally, the samples containing vehicle echo are discarded when the covariance matrix for the STAP is estimated. The theory analysis and experimental results illustrate that the proposed method advances the output of signal to clutter plus noise ratio, and improves the performance of STAP in the road network environments.
Space Time Adaptive Processing (STAP); Knowledge Aided (KA); Road network data; Target self nulling
TN957.51
A
1009-5896(2015)03-0613-06
10.11999/JEIT140626
2014-05-14收到,2014-08-18改回
国家自然科学基金(61372133, 61471285, 61401500)和国家留学基金资助课题
*通信作者:王彤 twang@mail.xidian.edu.cn