城区有轨电车首级控制网的设计研究
2015-07-04蒋胜华郑岘薛卫星武汉市测绘研究院湖北武汉430022武汉大学测绘学院湖北武汉430079
蒋胜华,郑岘,薛卫星,2(.武汉市测绘研究院,湖北武汉 430022; 2.武汉大学测绘学院,湖北武汉 430079)
城区有轨电车首级控制网的设计研究
蒋胜华1∗,郑岘1,薛卫星1,2
(1.武汉市测绘研究院,湖北武汉 430022; 2.武汉大学测绘学院,湖北武汉 430079)
摘 要:讨论了城区城市轨道交通工程首级卫星定位控制网的建立以及数据后处理的相关问题,采用South GPSProV-er4.0软件对GPS观测数据进行预处理、基线处理和网平差。对D级GPS静态控制网在城区有轨电车首级卫星控制网的应用研究作了一些探讨。
关键词:有轨电车;GPS控制网;数据处理
1 引 言
现代有轨电车是一种新型绿色的公共交通方式,它既弥补了轨道交通覆盖不足的缺陷,又弥补了常规公交运量不足的弱点,对城市格局、多模式多层次的公共交通系统以及产业发展起到关键的推动作用[1]。按照《城市轨道交通工程测量规范》、《卫星定位城市测量技术规范》和《城市测量规范》等相关规范的要求,有轨电车需首先布设首级卫星定位控制网[2]。在线性工程测量中,一般存在已知点较少、已知点位分布不佳、控制网网形呈带状、相对高差大等因素[3]。使用传统的测量手段布设线性控制网不仅难度大、工作繁琐耗时,而且不好控制误差的积累,而这些技术难点也都是卫星定位控制网需要克服的[4]。近些年来,随着GPS(Global Positioning System)、GLONASS(Global Orbiting Navigation Satellite System)、北斗等定位系统不断发展完善,各种误差模型(如电离层、对流层)的精化,整周模糊度求解算法的改进,极大提高了GNSS定位的精度与可靠性;同时卫星定位算法的不断改进,促进了高精度GPS精密后处理软件的不断发展,进一步提高了卫星测量定位的精度。这使空间定位技术得到充分的应用,尤其是静态GPS测量模式。在各级测量控制网的建立方面,GPS定位技术已基本上取代了传统的测量手段[5]。
本文以某城区的一个有轨电车控制网为例,详细介绍城市轨道交通工程首级卫星定位控制网的建立、数据采集和事后数据处理以及用D级GPS静态控制网建立城市轨道交通工程首级卫星定位控制网的应用研究。
2 城市轨道交通工程首级控制网的建立
2.1城市轨道交通工程平面控制网概述
控制网是指按一定原则布设的由一系列固定点所构成的相互联系的网,然后按一定技术标准测量网中所有控制点的坐标;各等级大地测量控制网的建立是为了精密确定地面点的平面位置和高程[6]。城市轨道交通工程平面控制网由两个等级组成,一等为卫星定位控制网,二等为精密导线网。
2.2城市轨道交通工程首级控制网的精度及等级
城市轨道交通工程首级控制网是卫星定位控制网,其控制网的设计按照GPS静态相对定位原理进行,主要技术指标如表1所示。

卫星定位控制网的等级及精度标准 表1
其中,卫星定位控制网相邻点间的基线精度按式(1)计算。
σ=±a2+(b·d)2
(1)
其中,σ表示标准差,即基线向量的弦长中误差(mm),a表示与接收设备有关的固定误差(mm),b表示比例误差系数(1×10-6),d表示相邻点间的距离(km)。
2.3城市轨道交通工程首级控制网设计
根据测区已有的等级控制点分布情况,平面控制网利用静态GPS测量的方式,以WHCORS网基准站KC点、CD点以及C192,C194,C288为起算点,在整个城区测区范围内沿线密度均匀、结构合理地设置了27 个D级GPS控制点。为保证点位的内符合精度须满足《轨道规范》的首级卫星定位控制网的要求,外业观测每个时段长度增加50%,并提高重复设站的比例,以保证其精度与可靠性。

图1 城区有轨电车示意图及首级卫星定位控制网布点图
GPS网点选点时应尽量使控制网网点与国家各级控制网网点重合,充分利用原有控制点的标石;控制网点之间至少保持两个方向通视;点位的基础坚实稳定,易于长期保存,视野开阔,并且远离大功率无线电发射源[7]。
3 城市轨道交通工程控制网的数据采集与处理
根据GPS控制网对同步闭合环、异步闭合环、重复基线的要求以及测区的具体地理位置即可确定具体的作业实施方案,选择最佳的观测时段进行野外数据采集。本文所用的控制网采用九台South S82-V系列双频接收机,用网连式进行外业观测。
外业观测后得到的GPS观测数据,经过数据处理,即可获得准确的三维坐标。GPS数据处理的流程一般包括数据预处理、基线解算和GPS网平差。
3.1数据预处理与基线向量解算
在得到原始观测数据后,就要首先对其进行数据预处理,然后再对GPS网的基线向量进行解算[8]。
GPS数据预处理包括外业观测数据的检查,探测数据中的粗差,剔除质量不佳的数据,从而提高观测数据的质量;对观测质量不太理想的时段进行分析处理,以得到符合要求的观测数据。数据预处理的目的是改善数据的质量,为进一步的基线结算和网平差做准备。
基线向量是指利用2台或2台以上GPS接收机所采集的同步观测值形成的差分观测值,也是两接收机间的三维坐标差。基线解算时一般用双差观测值作为差分观测值,双差观测值是由2个测站的原始观测值分别在测站间求差和卫星间求差后所得到的差分观测值。双差观测值的一般方程如式(2)所示。

基线解算后构成GPS基线向量网,然后我们需要对基线的处理结果进行检核,指标主要包括:同步环闭合差、异步环闭合差、复测基线较差等,直到所有基线的结果均符合相关规范的要求之后才能进行下一步的GPS网平差。
3.2GPS网平差
网平差的目的主要是为了消除由观测量和已知条件中存在的误差而引起的GPS网在几何上的不一致,改善GPS网的质量并评定其精度,确定GPS网中的点在指定参考系下的坐标以及其他所需参数的估值[9]。
一般来说,通过单一类型的网平差并不能同时实现上述3个目的,所以需分阶段采用不同类型的网平差来实现,常见的网平差方法包括三维无约束平差、二维约束平差和联合平差3种[10~11]。
三维无约束网平差:用上述基线解算检核后合格的GPS基线向量作为观测值,其对应的方差-协方差的逆矩阵作为权阵,进行平差计算。该过程主要目的是为了检查控制网中的基线是否含有粗差以及是否含有明显的系统性偏差。由于使用的观测值全部是GPS基线向量,除了引入一个确定位置基准信息的起算点之外,没有引入其他任何外部起算数据,因此不会引起GPS网在尺度和方位方面的变化,所以其平差结果体现了控制网的内符合精度,反映了观测值本身的好坏,更符合工程实际[12]。
二维约束平差:其与三维无约束网平差不同的地方在于在平差的过程中引进了会使GPS网尺度与方位发生变化的外部起算数据。二维约束平差主要是将GPS网成果从基线结算时的GPS卫星星历采用的参考系转换到指定参考系。
联合平差:平差时所采用的观测值不仅包含GPS基线向量,而且包含一些常规的观测量,如边长、角度、方向和高差等地面常规的观测量。
4 实例分析
以某城区一个D级GPS控制网为例,严格遵循从高级到低级布设控制网的原则,利用高等级控制点作为起算点进行施测。测区周边有我院B级GPS点2 个,C级GPS点3个均为二等水准点,作为本工程控制起算依据。本工程共布设D级GPS点27个。
4.1静态GPS控制测量
本次GPS控制网新增点位共27个,全部按照设计书的要求进行施测。联测C级GPS控制点2点,联测B级GPS控制点2点(KC基站和CD基站),外业数据采集分别于2014年9月1日以及2015年3月21日进行。观测仪器全部为South S82-V系列双频接收机,共9台全部在鉴定有效期内,在测量之前均进行了对中器、水准气泡的检校。本项目采用GPS网连式的方式进行同步观测,分两期进行观测,分别为一期控制网及二期控制网,具体网形分布如图2所示,外业观测指标如表2所示。

图2 有轨电车D级静态GPS控制网一期(左)和二期(右)
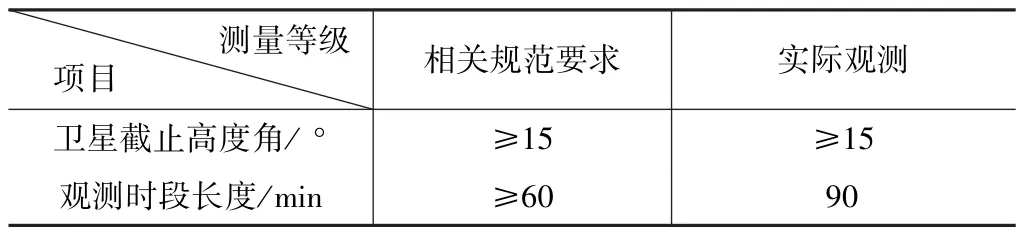
GPS实际观测指标与规范要求 表2

平均重复设站数/次 ≥2.0(轨道规范) 一期:2.28二期:2.20同时观测有效卫星个数 ≥4 >4数据采样率/ s ≤10(轨道规范) 10
4.2数据处理及平差计算
对观测数据,采用South GPSPro Ver4.0软件和广播星历进行基线解算,分别得到有效基线(双差固定解)91条和114条。本项目GPS三维向量分别构成闭合环921个和1 728个,同步闭合环224个和633个,异步闭合环697个和1 095个,由GPS三维基线向量所构成的坐标分量相对闭合差和环线全长相对闭合差均小于规范规定要求。
在通过基线检验的基础上,选取有效基线组成三维GPS向量网,进行WGS-84椭球基准下的三维无约束平差。三维无约束平差采用以KC为固定点,按D级网精度要求进行处理,两期控制网共计205条基线。而在轨道工程中,控制网的内符合精度尤为重要,为进一步分析本项目GPS网的内符合精度,将基线相对精度分布情况统计如图3所示。
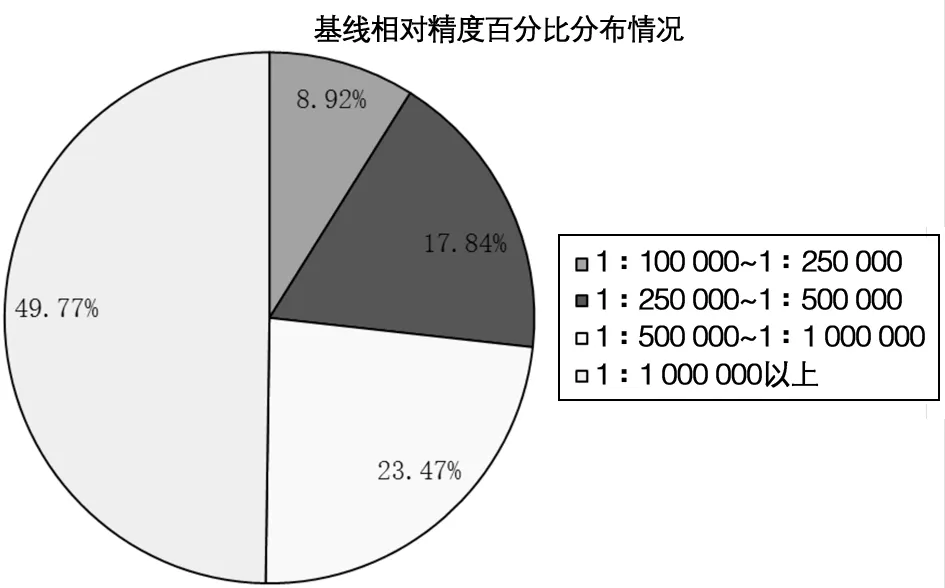
图3 基线相对精度分布图
以上三维无约束平差结果表明,本次GPS控制网具有较高的内符合精度,达到并优于规范的要求,为下一步的测量工作打下了坚实的基础。另外,此次GPS网中,共计新增点位27个,通过解算,各个点位的中误差如表3所示。

点位中误差一览表 表3
如表3所述,最小点位中误差为1.78 mm (GD06),最大点位中误差为7.95 mm(GD24),所有点的点位中误差均小于规范要求的12 mm。
另外,考虑到一期控制网与二期控制网的衔接,重合了部分控制点,为了便于优化选择,根据固定点在控制网中的分布情况,保证轨道交通各线路的相互对接,经点位兼容性分析,选择合适的固定点作为最终约束平差结果。平差成果的主要技术指标如表4所示。

不同线路重合点坐标较差表 表4
由表4可知,各期控制网重合点的平面坐标较差均满足规范规定的不同线路重合点坐标较差≤±25 mm的限差要求,以上成果分析表明,各期卫星定位控制点成果具有较好的一致性,成果可靠性高。
5 结 论
从大量城市交通工程的实例可知,现代有轨电车的建设是对常规交通工具运营量不足的补充,且具有较好的经济节约性和环境友好性。随着空间定位系统以及全国各省市CORS系统的不断发展与完善,其全天候、高效率、高精度的特点越来越突出,在各种工程的平面控制测量中得到了广泛的应用。而在轨道交通工程中,控制网的内符合精度尤为重要,需在常规GPS施测模式的基础上增加观测时段长度、增加重复设站次数等措施以保证其精度达到规范要求。所以,在经典GPS静态测量模式的基础上,根据相关规范要求灵活增加相应的保证措施后,用于城区现代有轨电车的建设中具有较高的应用价值和经济效益。
参考文献
[1] 崔亚南.现代有轨电车应用模式及区域适用性评价研究[D].北京:北京交通大学,2012.
[2] 王志武,郑永海.GPS在城市区域控制测量中的应用[J].水利与建筑工程学报,2010(1):120~121,150.
[3] 黄声享,尹晖,蒋征.变形监测数据处理(第二版)[M].武汉:武汉大学出版社,2010.
[4] 吴浩,杨剑,黎华.GPS原理及工程安全监测应用[M].武汉:武汉理工大学出版社,2014.
[5] 马全明.城市轨道交通工程精密施工测量技术的应用与研究[J].测绘通报,2010(11):41~45.
[6] 陈俊勇,杨元喜,王敏等.2000国家大地控制网的构建和它的技术进步[J].测绘学报,2007(1):1~8.
[7] 章迪,尹晖,郭际明等.特高压输电线路对GPS观测数据质量影响分析[J].大地测量与地球动力学,2013(5):58 ~62.
[8] 张辛,许其凤,杨爱明等.GPS数据处理软件的功能与性能分析[J].测绘科学技术学报,2014(4):347~350, 354.
[9] 贺小星,周世健.某城区D级GPS静态控制网设计与实施[J].江西科学,2012(30):295~298,318.
[10] 李征航,黄劝松.GPS测量与数据处理[M].武汉:武汉大学出版社,2010.
[11] 黄观文,张勤,丁晓光等.一种高精度GPS基线网平差及软件研制[J].测绘科学,2009(2):167~169.
[12] Alireza AmiriSeemkooei.Analytical methods in optimization and design of geodetic networks[D].K.N.Toosi University of Technology,1998.
Design Research of First Control Network in City Tram
Jiang Shenghua1,Zheng Xian1,Xue Weixing1,2
(1.Wuhan Geomatics Institute,Wuhan 430022,China; 2.School of Geodesy & Geomatics,Wuhan University,Wuhan 430079,China)
Abstract:This paper discussed issues of the establish method and data processing of the first GPS Control Network of the city Urban Rail Transit Project.We processed the GPS observation data with south GPSProVer4.0 software for preprocessing,baseline processing and network adjustment.With taking D-grade GPS control network in the first GPS Control Network,some discussion about its application of urban streetcar are made.
Key words:tram;GPS control network;data processing
文章编号:1672-8262(2015)05-95-04中图分类号:P228
文献标识码:A
收稿日期:∗2015—06—11
作者简介:蒋胜华(1984—),男,工程师,主要从事城市勘测技术工作。
通讯作者:薛卫星(1990—),男,硕士研究生,研究方向:精密工程测量与数据处理理论。
基金项目:国家自然基金(41174010);长江科学院开放研究基金资助项目(CKWV2014217/ KY)。
