中低速磁浮列车采用液压制动系统的探讨
2017-04-06曾宪华费巍巍蒋峰
曾宪华++费巍巍++蒋峰


【摘 要】中低速磁浮列车具有噪音低、转弯半径小、爬坡能力强等优点,成为颇受青睐的一种交通选择。目前国内中低速磁浮列车制动系统普遍采用气转液的模式,鉴于近年来国内有轨电车液压制动系统技术趋向成熟,对国内中低速磁浮列车制动系统采用液压方式进行探讨,提出基于现代有轨电车液压制动系统的中低速磁浮列车液压制动系统初步方案。
【关键词】中低速磁浮列车 液壓制动系统 有轨电车
【Abstract】 Medium and Low speed maglev train has the advantages of low noise, small turning radius, strong climbing ability and so on.It has become a popular choice for traffic. At present, the medium and low speed maglev train braking system is widely used in pneumatic and hydraulic transfer mode. In recent years, domestic tram hydraulic braking system technology is to be matured. Efforts are made to carry on the discussion to the domestic medium and low speed maglev train braking system, put forward medium and low speed maglev train hydraulic brake system preliminary plan based on the hydraulic braking system of modern tram.
【Keywords】 medium and low speed maglev train;hydraulic brake system; tram
中低速磁浮列车具有噪音低、转弯半径小、爬坡能力强等优点,尤其适用于城市内部、近郊和旅游景区的交通运输,与地铁、轻轨配合,构成合理的城市轨道交通体系。
目前,国内中低速磁浮车辆制动系统普遍采用微机控制直通电控气转液制动系统,即制动控制部分采用空气制动机,制动执行部分采用液压元件,中间采用气液转换装置;之所以这样设计,主要是受制于之前国内轨道交通液压制动系统技术还不成熟。随着近来国内低地板现代有轨电车液压制动系统的成功自主化,对于对重量要求苛刻、车下空间紧张的中低速磁浮车辆,提出采用全液压制动系统的设想。
1 气动制动系统介绍
目前国内中低速磁浮车辆制动系统按照《CJ/T 375-2011 中低速磁浮交通车辆通用技术条件》要求设计,其主要参数如下[1]:
制动系统与列车上供风及其他用风设备是紧密相连的,因此,将供风单元、空簧设备、紧急救援支撑设备等一并介绍。制动系统主要设备及接口关系见图1(以E车为例),下面就供风、制动、空簧充排风、救援支撑等功能进行介绍,阐述对应设备的组成和原理。
1.1 供风
列车上所有用风设备的压缩空气供给来自供风单元,正常工作时,TCMS通过MVB网络获取EBCU上报的总风压力信号;当网络故障时,由APCU中的总风压力开关对空压机启停进行控制。供风单元中的故障信号通过硬线发送给EBCU,EBCU再通过MVB网络上传给TCMS。
供风单元输出压缩空气给主风管,APCU把主风管的压缩空气分配给主风缸、制动风缸、空簧风缸、支撑风缸,并有截断或者逆止功能,同时,可对这些风缸的空气压力进行监控。
三辆编组的列车在两头车上配置供风单元,单个供风单元能够满足列车正常用风需求,单双日轮换工作。每辆车配置1个110L主风缸。
1.2 制动
制动功能由微机控制直通电空气转液制动系统来实现。
常用制动时,EBCU根据列车的硬线、网络指令以及载荷信号,控制PBCU输出相应的制动空气压力,该压力经过制动隔离阀到达增压缸,实现气液转换及增压作用,增压缸输出的液压压力驱动制动夹钳闸片压紧F型轨道,形成外力(摩擦力)对车辆实施制动。
紧急制动时,由PBCU直接响应TCMS紧急制动列车线指令,输出紧急制动压力。
常用制动和紧急制动具有载荷补偿功能。
制动隔离时,通过人工操作带电触点的制动隔离阀,将因为故障或者维护的制动夹钳进行相应隔离。
每辆车配置一个90L制动风缸,满足3次紧急制动的用风量。每辆车5个悬浮架,中间3个悬浮架左右模块各配置一套制动夹钳,每套制动夹钳由1个增压缸驱动。每个悬浮架配置一个带电触点制动隔离阀,隔离本悬浮架的两个制动夹钳。
1.3 空簧充排风
空簧冲排风主要由高度阀来实现。
空簧风缸的压缩空气经过APCU的限压作用,供给各高度阀,经过高度阀的调节再到空气弹簧。当载荷增加,车辆地板面下沉时,高度阀给空气弹簧充风;当载荷减少,车辆地板面上浮时,高度阀给空气弹簧排风。通过高度阀的调节,始终保持车辆地板面在相应的高度。
排风电磁阀,布置于高度阀之后,每个悬浮模块两个空气弹簧的供风管路中。当悬浮失效时,如果对应的空气弹簧压力还同之前,则该悬浮架支撑滑橇承担了列车起浮前的载荷,该载荷造成支撑滑橇和轨道间较大的摩擦力,如果列车继续高速运行,将加剧支撑滑橇和轨道的磨损。如果对应的空气弹簧压力排掉,则该悬浮架支撑滑橇承担的仅是该悬浮模块的自重,支撑滑橇和轨道间摩擦力很小,即使列车高速运行,对支撑滑橇和轨道的磨损也极为有限。
每车设置1个90L的空气弹簧风缸,4个高度阀,用于给20个空气弹簧调节供风。左右两个对应高度阀下游空气弹簧管路由差压阀相连,将左右空气弹簧的压差值控制在一定范围内,防止由于左右空气弹簧压差过大造成列车倾覆。
1.4 救援支撑
当悬浮系统出现故障时,救援支撑轮将车辆撑起,其高度与悬浮高度一致,列车可以以5km/h的速度自行牵引退出运行。
救援支撑功能采用气转液形式实現。救援支撑风缸中的压缩空气,经过APCU降压处理后到达脉冲电磁阀,脉冲电磁阀根据司机指令输出压缩空气到增压缸,实现气液转换及增压作用,增压缸输出的液压压力驱动支撑油缸将救援轮顶出,实现救援行车。当救援结束后,脉冲电磁阀排掉增压缸中的压缩空气,油缸及增压缸在自身弹簧的作用下实现复位,支撑轮收起。该脉冲电磁阀还具有手动操作功能,在列车调试过程中方便操作。
每车配置一个110L的救援支撑风缸,10个悬浮模块给配置1个增压缸,驱动本模块上4个救援支撑油缸。
2 液压制动系统方案
该方案主要是将“气转液”的制动和救援支撑功能完全由液压系统实现,供风以及空簧充排风装置与之前变动不大。液压制动系统方案主要设备及接口关系见图2,同样就供风、制动、空簧充排风、救援支撑等功能进行介绍,阐述对应设备的组成和原理。
2.1 供风
制动和救援支撑功能完全由液压设备实现,则减少了列车的用风量,也简化了供风设备。主要用风设备就是空气弹簧,取消了制动风缸、救援支撑风缸,总风缸和空簧风缸合二为一,取消其中一个;同时APCU中对于各风缸压缩空气分配及监控元件也相应简化。而且,供风系统的功能不关乎制动,这样,总风低压也不用触发紧急制动,增强了列车可用性。供风单元的排风量减小许多,设备相应小型化,重量减轻,占用空间减小。
但为了实现冗余,每列车还是配置2套供风单元,位于两端头车。
2.2 制动
制动功能完全由液压制动系统实现,则取消了PBCU、增压缸。借鉴在国内首套自主知识产品低地板有轨电车液压制动系统的经验,电子制动控制单元的功能不变,对外接口仅把控制PBCU调整为控制HBCU,HBCU的设计原理如图3。
当系统上电后,EBCU采集HBCU中蓄能器压力传感器信号,如果蓄能器压力低,EBCU则输出信号给电机控制器,电机控制器一方面可以接通列车电源给HBCU中的电机,同时限制电机的启动电流,以免对列车电压造成冲击。电机带动齿轮泵给蓄能器充液压油。液压油在通往蓄能器的过程中,首先经过过滤器进行清洁,之后经过单向阀,在电机停止工作后,蓄能器的压力不能逆流。同时,HBCU中设置了手动卸荷阀,当在检查、维护时设备时,通过其可把蓄能器的压力完全卸掉。当蓄能器中蓄积的压力达到要求后,EBCU控制电机接触器断开给HBCU中电机供电,齿轮泵停止工作。如果电机没能正常停止,溢流阀会把多余的压力卸载回油箱,确保制动液压回路安全。也可以通过EBCU将超时工作的电机强行切断启动工作信号。
常用制动时,EBCU根据列车的硬线、网络指令以及载荷信号,控制HBCU中的比例阀输出相应的液压压力,经过紧急电磁阀和辅助缓解电磁阀到达制动夹钳。通过制动缸压力传感器,EBCU控制比例阀形成制动缸压力的闭环控制。
紧急制动时,紧急电磁阀失电,经过减压阀减压的蓄能器压力通过紧急电磁阀和辅助缓解电磁阀到达制动夹钳。紧急制动压力根据车辆AW3载荷进行设定,因为磁浮车辆属于非粘着制动,不必担心空车发生滑行,在空车时,制动率稍高,但由于紧急制动是偶然事件,确保冲动限制即可。
制动隔离时,通过列车给辅助缓解电磁阀供电,实现制动缸压力释放;如果列车不能上电,则通过手动卸荷阀,把蓄能器压力释放掉之后,制动缸压力通过辅助缓解电磁阀、减压阀、手动卸荷阀逆流到油箱,实现制动夹钳缓解。当然,也可以在管路中设置单独的回油阀,将液压油回到邮箱,实现制动夹钳的更快速缓解。
2.3 空簧充排风
空簧充排风的方案与之前相同。
2.4 救援支撑
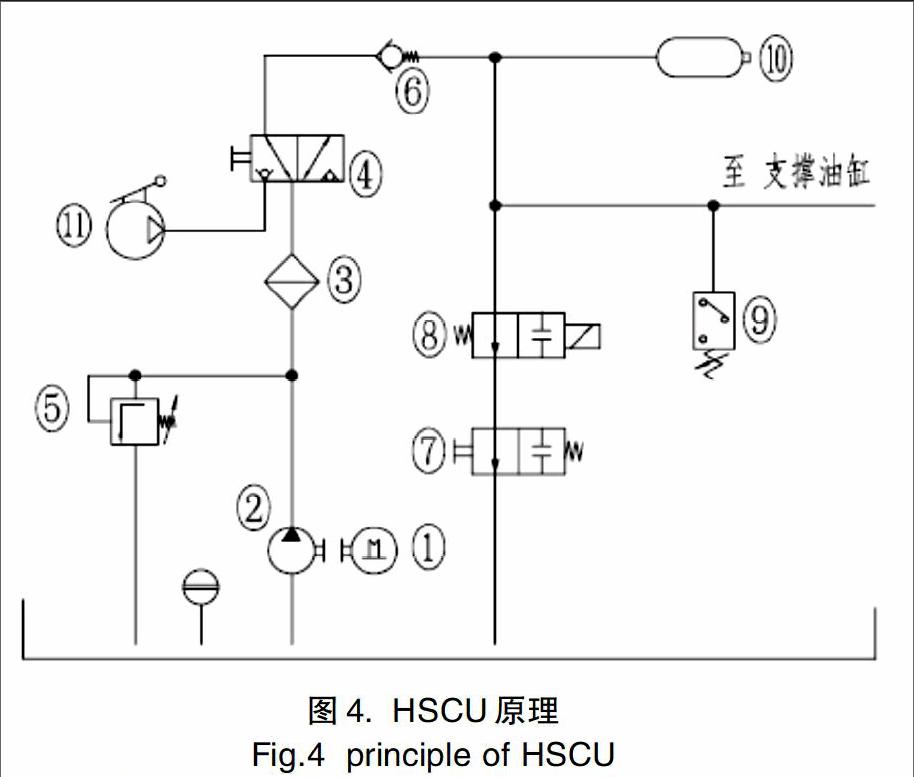
救援支撑功能完全由液压设备实现,则取消了增压缸。借鉴有轨电车辅助缓解装置的经验,设计满足要求的HSCU,其原理如图4。
列车正常运行时,HSCU不工作。
当需要救援支撑时,司机台发出硬线指令,HSCU收到该指令后,一方面给回油阀得电,同时发出压力开关信号给电机控制器,电机控制器根据收到的压力开关的低压信号,控制给HSCU的电机供电,电机带动齿轮泵工作,液压油输出,先经过过滤器进行清洁,之后经过单向阀,最终到达支撑油缸和蓄能器,在电机停止工作后,蓄能器的压力不能逆流。当支撑油缸压力足够时,压力开关信号跳变,电机控制器停止给HSCU中电机供电,齿轮泵停止工作。如果电机没能正常停止,溢流阀会把多余的压力卸载回油箱,确保制动液压回路安全。蓄能器用于稳定系统压力,避免电机频繁启动。
救援支撑结束,司机台支撑指令置低电平,HSCU失电,压力开关不输出信号给电机控制器,同时回油阀失电,将支撑油缸压力卸载到油箱,支撑轮在自复位弹簧作用下收起。
如果在库内调试,没有上电条件,可以采用手动泵输出压力,但此时要先关闭截断塞门,操作人员通过压力表来监测压力是否到位。需要支撑轮收起时,手动开启截断塞门即可。
3 比较
新方案与既有系统从功能、性能、重量、空间等方面进行比较,详见表1。
通过比较可以看出,新方案在功能和性能上没有弱化,有些甚至增强;在重量上可以减轻很多,保守估计减重将近360kg(单节车),为悬浮系统减轻负担;可以减小车下占用空间,便于车辆设备布置,增强各设备可维护性;总体成本略有下降。
4 结语
微机控制直通电空气转液制动系统与气转液救援支撑装备自从2006年已经在上海中低速磁浮样车上开始应用,经过近10年的考验与优化,已经能够满足车辆使用要求;但车辆的自重始终是个负担,且车辆设备布置困难,一定程度上,由于空间限制,设备的可维护性不尽人意。
适逢国内首套具有自主知识产权的低地板有轨电车液压制动系统问世[2]并且经过批量项目的应用,轨道交通液压制动系统技术已经成熟。可以向中低速磁浮车辆制动系统延伸,以减轻重量、腾出空间、提高性能,使得中低速磁浮车辆技术水平进一步提高。
参考文献:
[1]曾宪华.上海中低速磁浮列车制动系统与供风系统[J].装备机械,2010,No.2;33-37.
[2]徐雷.国内首套具有自主知识产权低地板轻轨车辆制动系统运营考核评审会在长春召开[J].城市轨道交通研究,2013(8):28.
