红外寻的导弹舵机舵偏角速率需求分析
2015-07-01李友年陈星阳郑鵾鹏
李友年,王 霞,陈星阳,郑鵾鹏
(中国空空导弹研究院,河南洛阳 471009)
红外寻的导弹输入噪声主要有视线角测量噪声、闪烁噪声、目标均匀分布机动噪声。本文从红外寻的导弹输入噪声的角度,利用伴随分析方法,对舵机舵偏角速率的需求进行了分析。
1 伴随分析方法
伴随技术是基于系统脉冲响应的,它能用于分析如导弹寻的回路这样的线性时变系统。应用伴随方法,可以得出在特定时间的任何量的确切性能估计,并可以得出所有干扰量对性能的影响信息。
1.1 伴随系统产生方法
伴随系统是通过对原始系统按照一定的变换规则加以变换得到的,对于线性时变系统,首先画出它的状态变量图,然后按照以下规则变换[1]:
1)用tf– t 代换原系统中所有变系数的自变量时间t。
2)倒换所有信号的流动方向,并将分支点改为求和点,将求和点改为分支点,则原始系统的输入端变为新系统的输出端,原始系统的输出端变为新系统的输入端。
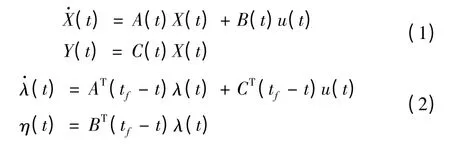
即,若原系统的状态方程如式(1),则相应的以状态空间描述给出的伴随系统的表达式如式(2):
1.2 噪声系统的伴随模型
若线性系统的输入为白噪声,假定白噪声的功率谱密度为φ,系统对噪声的脉冲响应函数为h(t,τ),可得线形系统对白噪声均方响应的数学期望[2-3]

其中:y(t)为线形系统对白噪声的响应;τ 为脉冲发生时间;t为观测时间。
根据式(1)、式(2)所述的原始系统与伴随系统的基本关系,可得

令x=tf-τ,则有

则当t=tf时,有

由式(6)可知,当线形系统具有多个确定的白噪声输入时,对原始系统的白噪声输入变成伴随系统的输出,具有随机输入的线性系统的伴随模型与原模型等效关系如图1 所示。
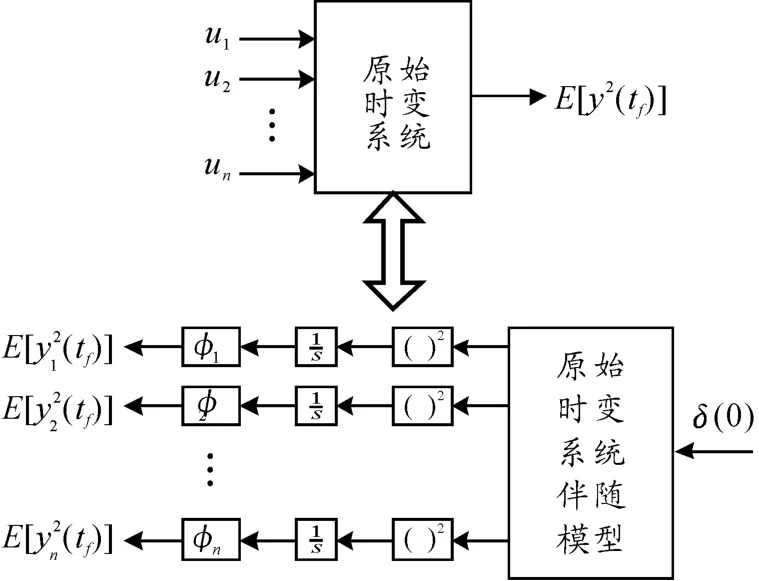
图1 随机输入的伴随模型与原模型等效关系
2 舵偏角速率需求分析
红外寻的导弹输入噪声主要有视线角测量噪声、闪烁噪声、目标均匀分布机动噪声。
红外寻的导弹制导系统伴随模型如图2 所示。
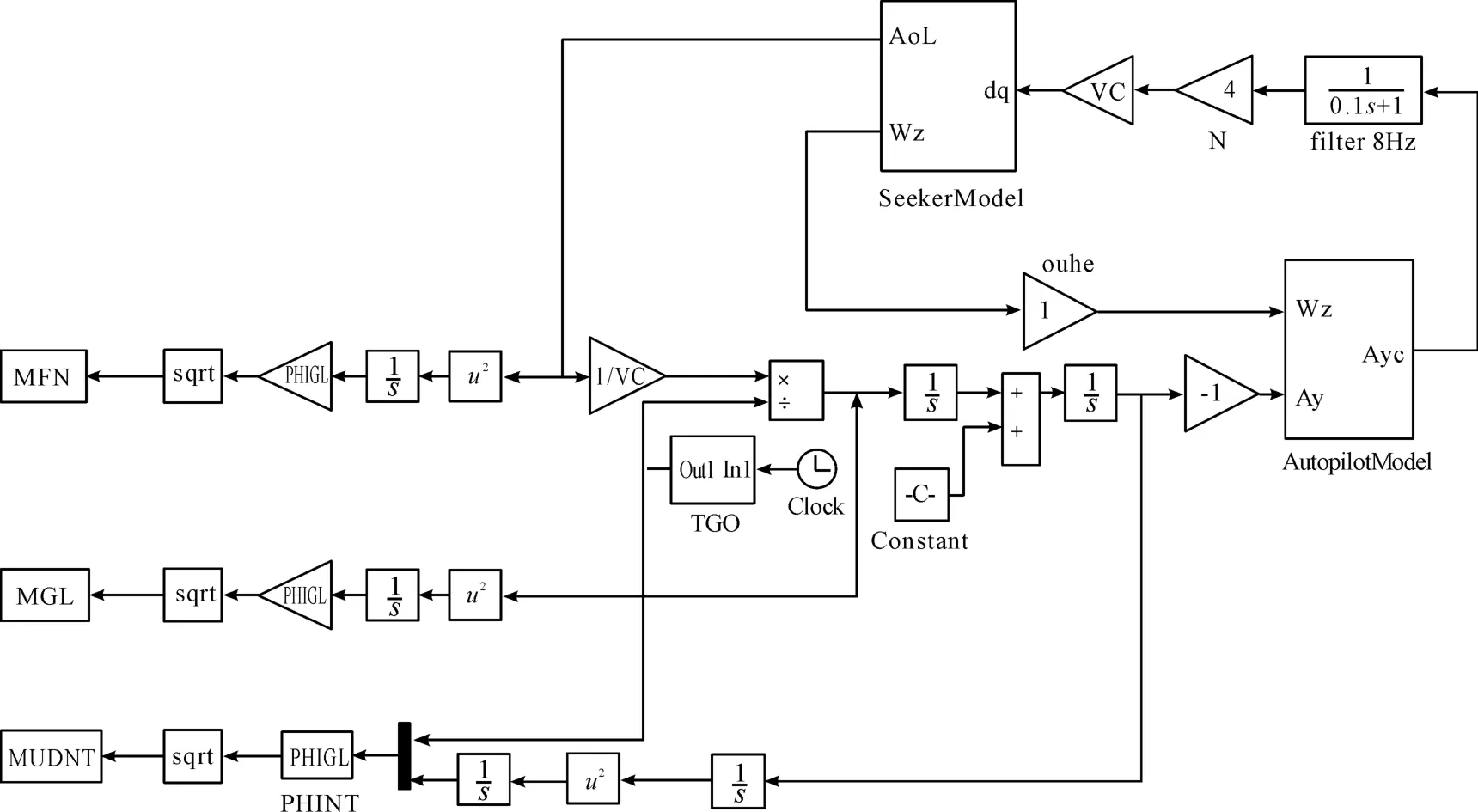
图2 红外寻的导弹制导系统伴随模型
2.1 视线角测量噪声对舵机角速率的需求分析
导弹高度10 km,导弹速度3 M,接近速度1 200 m/s,有效导航比取4,噪声相关时间常数取0.01 s,引入视线角噪声,噪声均方根分别取0.5 mrad、1 mrad 和2 mrad(对应的像素数分别为1、2 和4)。仿真结果如图3 所示,可知,当视线角噪声为0. 5 mrad(1 个像素)时,需求的舵机角速率为55°/s。
2.2 闪烁噪声对舵机角速率的需求分析
2.2.1 闪烁噪声为白噪声
导弹高度10 km,导弹速度3 M,接近速度1 200 m/s,有效导航比取4,模型中引入闪烁噪声,噪声的均方根分别取0.5 m、1 m 及1.5 m,噪声相关时间常数取0.1 s,仿真结果如图4 所示。

图3 视线角噪声对舵机角速率的需求
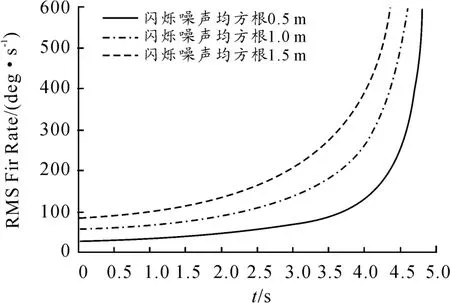
图4 闪烁噪声(白噪声)对舵偏角速率的需求
由图3 可知,舵机角速率随着噪声均方根的增大而增大,弹道末端,需求的舵机角速率增大。当噪声均方根为0.5 m 时,在弹道结束前0.3s 所需的舵机角速率达到380°/s。
2.2.2 闪烁噪声为随机噪声
对红外导引头而言,闪烁噪声一般为跟踪点跳动。由于闪烁噪声具有低频、自相关的特性,其带宽与系统带宽接近,一般不把闪烁噪声近似为白噪声。可利用白噪声通过一个成形滤波器来等效闪烁噪声

式中:Ts为系统采样周期;TN为成形滤波器时间常数。
由随机过程可知,若白噪声通过的成形滤波器的传递函数为

则输入白噪声的功率谱密度为

其中:T 为滤波器时间常数;σ 为等效的随机噪声的均方根。因此在伴随模型中引入成形滤波器,输入白噪声的功率谱密度如下

假定闪烁噪声为随机噪声,采用白噪声通过成形滤波器的方法来生成闪烁噪声,成形滤波器的传递函数见式(8),白噪声的功率谱密度按式(9)进行计算,系统的伴随模型如图5 所示。
采用上述伴随模型进行仿真分析,其中导弹高度10 km,导弹速度3M,接近速度1 200 m/s,有效导航比取4,模型中引入闪烁噪声,噪声的均方根分别取0.5 m、1 m 及1.5 m,噪声相关时间常数取0.1 s,仿真结果如图6 所示。
由图6 可知,对于特性为随机噪声的闪烁噪声,当噪声均方根为1 m 时,在弹道结束前0.3 s 时需求的舵机角速率为160°/s 。闪烁噪声对舵机角速率的需求如表1 所示。

图5 系统伴随模型

图6 闪烁噪声(随机噪声)对舵偏角速率的需求仿真结果

表1 闪烁噪声需求的舵机角速率
2.3 目标机动对舵机角速率的需求
假设目标做6g 的均匀分布机动,需求的舵机角速率的均方根如图7 所示。
由图7 可知,目标机动对舵机角速率的需求很小,可忽略。
3 结论
目标机动对舵机角速率的需求很小,可忽略;
当视线角噪声为0.5 mrad(1 个像素)时,需求的舵机角速率为55°/s;
闪烁噪声对舵机角速率需求较大:当闪烁噪声为随机噪声时,噪声均方根在1 m 左右时,在弹道结束前0.3s 时所需的舵机角速率达到160°/s。

图7 目标机动对舵偏角速率的需求
综上可知,当视线角噪声在0.5 mrad、闪烁噪声为随机噪声且均方根在1 m 左右时,需求的舵机角速率不小于170°/s。
[1]林晓辉,崔乃刚,刘撴.伴随理论及其在仿真中的应用研究[J].航天控制,1996(3):1-66.
[2]Paul Zarchan.Complete statistical analysis of nonlinear missile guidance systems-SLAM[Z].AIAA,77-1094.
[3]Paul Zarchan.Tactical and Strategic Missile Guidance[M].Fifth Edition.2006.