双三相永磁同步电机直接转矩控制谐波电流抑制研究
2015-06-27周长攀苏健勇杨贵杰
周长攀, 苏健勇, 杨贵杰
(哈尔滨工业大学电气工程及自动化学院,黑龙江哈尔滨150001)
双三相永磁同步电机直接转矩控制谐波电流抑制研究
周长攀, 苏健勇, 杨贵杰
(哈尔滨工业大学电气工程及自动化学院,黑龙江哈尔滨150001)
针对基于开关表的双三相永磁同步电机直接转矩控制中采用基本电压矢量会在z1-z2子平面产生大量6k±1(k=1,3,5,…)次谐波电流问题,通过引入脉宽调制的思想,对电压矢量进行修正,并对修正后的中间矢量进行了中心化处理,使其易于硬件实现。对两种直接转矩控制方法进行仿真分析和实验验证,结果表明通过采用修正后的中间矢量进行直接转矩控制可以很好的抑制z1-z2子平面的谐波电流,从而减少系统损耗,且控制系统的动静态性能不会受到影响。
双三相永磁同步电机;直接转矩控制;谐波抑制;脉宽调制
0 引 言
大功率化是交流传动系统的发展趋势,但由于电力电子器件功率等级的限制,传统两电平逆变器供电的三相电机驱动系统难以满足大功率应用。目前在中高电压大功率应用中主要采用多电平逆变器通过低电压等级功率器件级联来实现。但在电动汽车等低压大功率场合采用多相电机驱动系统更为合适,多相电机还具有转矩脉动小,容错性能强、功率密度高等优点。在各类多相电机中,相移30°双三相电机由于和传统三相电机具有紧密的联系而得到了广泛的关注。
永磁同步电机(permanent magnet synchronous motor,PMSM)直接转矩控制(direct torque control,DTC)具有转矩响应快、结构简单,对电机参数依赖性小等优点得到广泛的研究和应用[1-3]。针对双三相永磁同步电机,目前研究主要为基于矢量空间解藕的矢量控制[4-7],对其直接转矩控制研究的文献偏少,与三相电机相比,由六相逆变器供电的双三相电机系统具有64个基本电压矢量,可以根据磁链和转矩的暂态变化更加灵活地选择电压矢量,有助于提高转矩响应、减小定子磁链和转矩脉动。已有文献[8-14]大多没有考虑双三相电机多维子平面的特点,仅在与机电能量转换相关的基波子平面进行控制,存在谐波电流较大等问题。
本文首先给出了双三相永磁同步电机在不同子平面下的数学模型,对基于开关表的直接转矩控制系统进行了描述,针对采用基本电压矢量会在z1-z2子平面产生大量6k±1(k=1,3,5,…)次谐波电流问题,对电压矢量进行了修正。对修正后的中间矢量进行了中心化处理,使其易于硬件实现。使用修正后的中间矢量很好的抑制z1-z2子平面的谐波电流。仿真分析和实验结果验证了本文方法的正确性和可行性。
1 双三相永磁同步电机的数学模型
双三相永磁同步电机是一个六维系统,并且具有高阶、非线性、强藕合的特点,为简化分析对其进行如下假设:气隙磁动势和磁链作正弦分布,忽略铁心磁饱和效应,忽略绕组之间的互漏感。
根据矢量空间解藕理论,通过变换矩阵(1)可以将双三相永磁同步电机的所有变量映射到α-β、z1-z2和o1-o2三个相互正交的子平面中,其中基波和12k±1(k=1,2,3,…)次谐波被映射到α-β子平面,6k±1(k=1,3,5,…)次谐波被映射到z1-z2子平面,6k±3(k=1,3,5,…)次谐波被映射到o1-o2子平面上,其中α-β平面与电机的气隙磁通旋转平面一致,对应的电流分量会在气隙中形成旋转磁势,参与机电能量转换。z1-z2和o1-o2平面对应的电流分量不产生旋转磁势,不会产生电磁转矩。在中性点相互隔离的情况下,对应到o1-o2子平面中的变量都为零。因此对于中性点相互隔离的双三相电机是一个四维系统[15]。
式中α=30°,系数1/3是为了保证幅值不变原则。α-β子平面的数学模型为
其中:R为定子电阻;θ为电角度;Ld和Lq分别为d轴和q轴电感;ψfd为永磁体在每一相绕组中产生的磁链幅值;pn为极对数;Laal为定子自漏感;Te为电磁转矩;ωe为电角速度;uk、ik、ψk(k=d,q,α,β,z1,z2,x,y)为对应坐标系或子平面下的电压、电流和磁链。
对α-β子平面的电机模型进行派克(Park)变换可以得到转子同步旋转坐标系下的数学模型。


式中δ为转矩角,即定子磁链ψs与d轴之间的夹角。
2 双三相永磁同步电机直接转矩控制
六相电压源逆变器供电的相移30°双三相电机驱动系统如图1所示:根据式(11)双三相永磁同步电机与三相永磁同步电机直接转矩控制的基本原理一致,即在保持定子磁链ψs幅值不变的条件下,通过选择合适的电压矢量来改变转矩角δ,从而得到快速的转矩响应。与三相系统相比,六相逆变器存在64种开关状态,分别在α-β子平面和z1-z2子平面对应64个电压矢量,为直接转矩控制电压矢量的选取提供了更多的选择。

图1 六相电压源逆变器供电的双三相电机系统Fig.1 Six-phase voltage source inverter fed dual three-phasemotor system
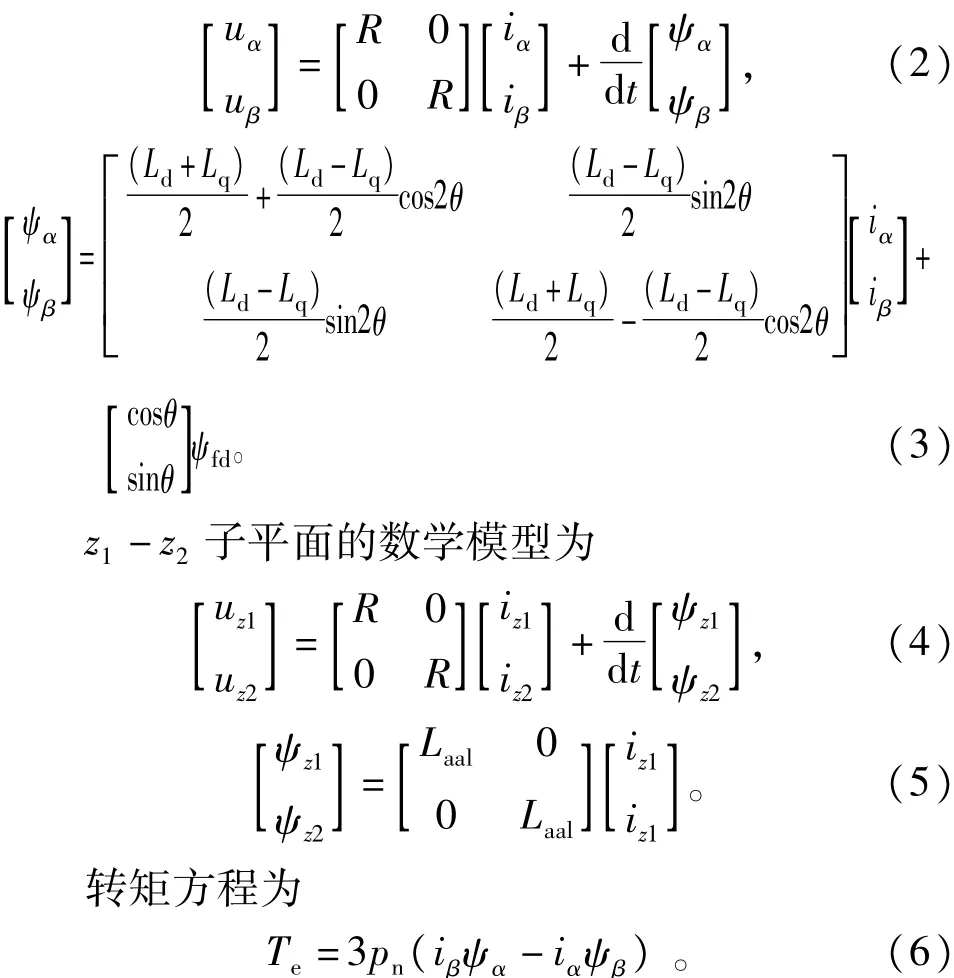
六相逆变器电压矢量图如图2所示,每一个子平面包括60个有效矢量和4个零矢量(00,07,70,77)。每一个电压矢量用一个八进制数表示,从高位到低位依次为(SA,SB,SC,SD,SE,SF),S为开关函数,以A相为例,若SA=1表示逆变器A相上桥臂导通;SA=0表示A相下桥臂导通。有效矢量可以分为4组,即大矢量vL、中矢量vM、小矢量vS和原始矢量vB,其中12个原始矢量的幅值为Udc/3,对应24个开关状态,其余各组矢量都可由这12个原始矢量合成,每组矢量在子平面内构成一个正十二边形。在α-β子平面幅值最大的矢量在z1-z2子平面的幅值最小,反之亦然。大矢量、中矢量和小矢量的幅值分别为:
由于机电能量转换只与α-β子平面相关,因此在α-β子平面上对定子磁链进行分区。其分区如图3所示,为简化分析,将图2(a)中在同一方向的大小不同的3个矢量定义为一组矢量并按逆时针方向重新排序,假设电机正转且定子磁链位于第0扇区,当需要同时增加转矩和定子磁链幅值时,可以有v0、v1、v23组矢量可以选择,电压矢量与当前定子磁链的夹角越大,其对转矩(转矩角)的影响越大,而对定子磁链幅值的影响越小,每组矢量中幅值越大对转矩和定子磁链幅值的影响越大且直流母线电压利用率越高。可以根据实际需求选择合适的电压矢量,为了更好的体现直接转矩控制的特点,本文对电压矢量的选取主要保证转矩的快速响应能力和最大的直流母线电压利用率,因此采用v2组矢量中的大矢量v2L,其余情况可类似选择。表1为当定子磁链位于第0扇区时12个大矢量对定子磁链幅值和转矩的影响,表中符号“↑”表示该矢量可以增加定子磁链幅值或者正方向(逆时针方向)改变电磁转矩,符号“↓”表示该矢量可以减少定子磁链幅值或者反方向(顺时针方向)改变电磁转矩,符号的多少表示该矢量产生效果的大小,表1只是说明电压矢量产生效果的变化趋势,符号相同的矢量产生的效果并不完全相同,这与定子磁链在扇区0的具体位置有关。开关表如表2所示:表2中Fψ和FT分别为磁链和转矩控制信号,1表示给定值大于观测值即需要增加该变量,0表示给定值小于观测值即需要减少该变量。
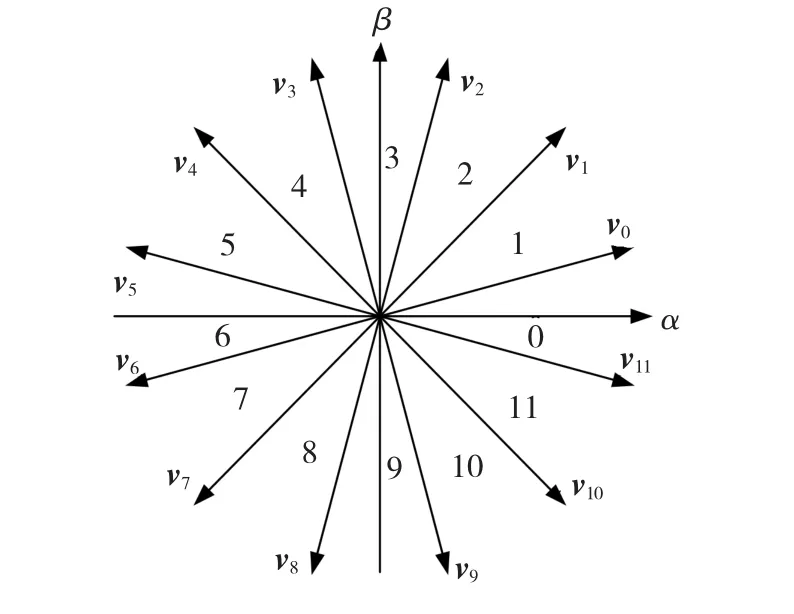
图3 定子磁链分区Fig.3 Partition of stator flux linkage

表1 不同电压矢量对定子磁链和转矩的影响Table 1 Stator flux and torque variations under different voltage vectors
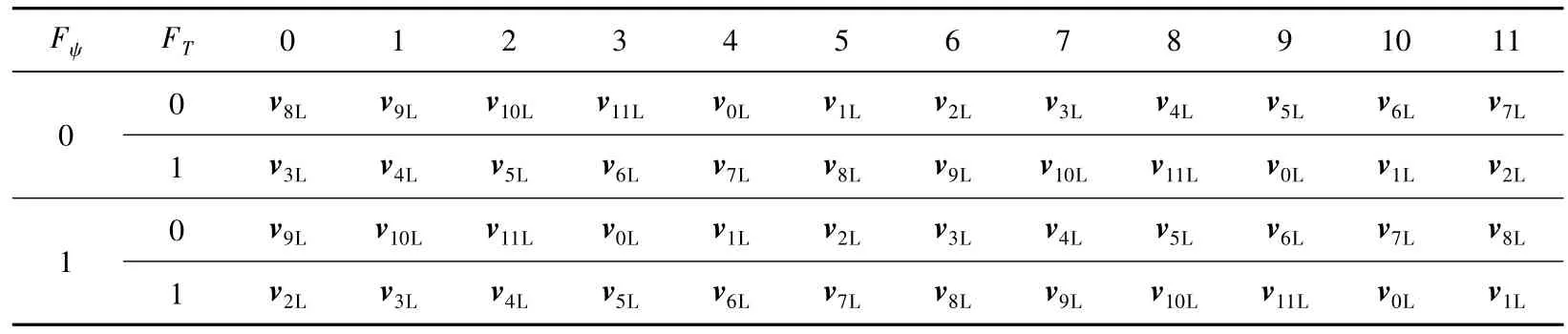
表2 开关表Table 2 Sw itching table
定子磁链估算采用反电势积分算法的电压模型为
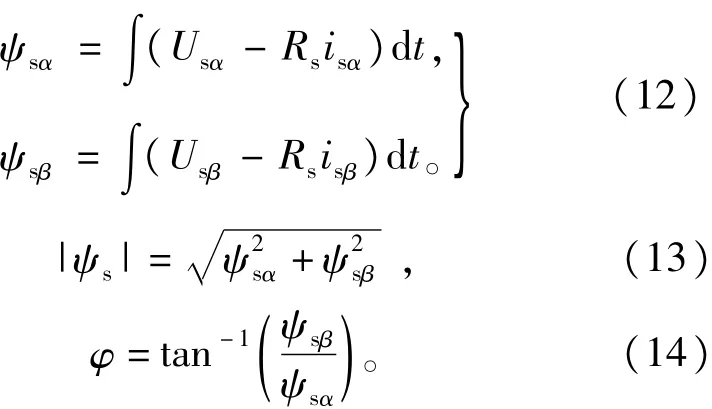
式中:t为采样周期;φ为定子磁链角。
双三相永磁同步电机直接转矩控制原理框图如图4所示。
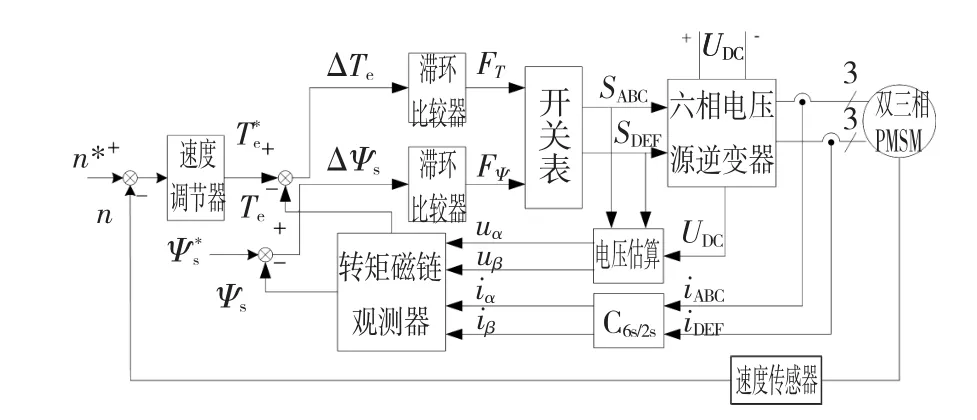
图4 双三相永磁同步电机直接转矩控制原理框图Fig.4 Block diagram of dual three-phase PMSM DTC
3 电压矢量的修正
上节中电压矢量的选取只考虑了与机电能量转换相关的α-β子平面,在z1-z2子平面的电压矢量并不为0,由于双三相电机不存在6k±1(k=1,3,5,…)次谐波旋转磁场,对应的谐波电流分量无法产生旋转磁势,z1-z2子平面的谐波阻抗仅由定子电阻和漏感组成,很低的谐波电压就可以产生大量的谐波电流,增加系统损耗,长时间运行会对电机造成损坏,因此必须对电压矢量进行修正。
由图2所示:在α-β子平面上同一方向上的大矢量和中矢量分别对应z1-z2子平面上方向相反的小矢量和中矢量。因此只要在一个控制周期中大矢量和中矢量的作用时间满足与小矢量和中矢量的幅值成反比关系,即可保证在z1-z2子平面上的合成电压矢量为零。定义在α-β子平面同一方向上的大矢量和中矢量合成的新矢量为中间矢量v,控制周期为Ts,设大矢量vL的作用时间为λTs,则中矢量vM的作用时间为(1-λ)Ts,中间矢量v在α-β和z1-z2子平面的幅值分别为
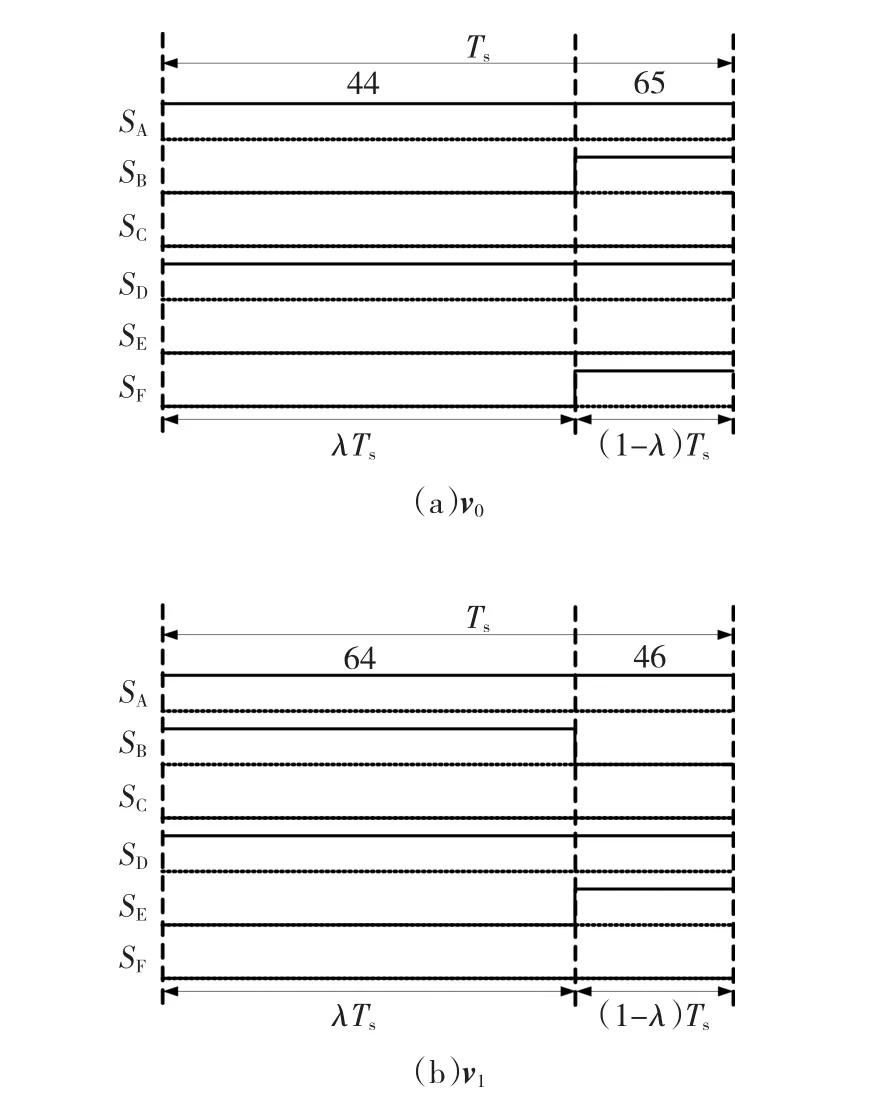
图5 中间矢量实现方法Fig.5 Realization method of intermediate vector
图5 所示的中间矢量波形不对称,不对称的波形难以硬件实现,考虑到输出电压的平均值只与脉冲宽度有关,而与其位置无关,可以将脉冲移到中心位置。图6为中心化处理后的中间矢量波形,其中v0对应的基本电压矢量没有变化,只是其作用顺序发生改变,而v1对应的基本电压矢量则发生了变化,由v64和v46转变为v44、v64和v66。通过对12个中间矢量进行分析,在经过中心化处理后,偶数组矢量vi(i=0,2,…,10)的实现方式相同;奇数组矢量vi(i= 1,3,…,11)的实现方式相同,只是对应需要开关的两个桥臂会发生变化。
使用修正后的中间矢量替代开关表1中的基本矢量(大矢量)进行直接转矩控制可以明显减少z1-z2子平面上的6k±1(k=1,3,5,…)次谐波电流,但使用中间矢量无法达到最大的直流母线电压利用率,当驱动系统无法满足转矩输出要求时,可以适当增大λ以提高转矩输出,当λ增大到1时中间矢量过渡到大矢量。由于中间矢量采用了电压矢量合成的思想,即使中间矢量的状态不发生改变,也有两路PWM信号在一个控制周期里需要开关一次,因此采用中间矢量DTC比基本矢量DTC的平均开关频率要高。
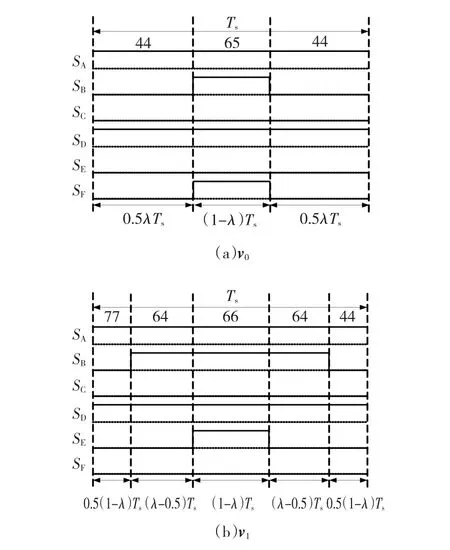
图6 中心化处理的中间矢量波形Fig.6 Intermediate vector waveform after centralization
4 仿真与实验结果
为验证本文提出控制策略的可行性,在一台隐极式双三相永磁同步电机上进行了仿真分析和实验验证。仿真参数与实验系统参数一致,电机参数为:定子电阻1.4Ω,直交轴电感2.04mH,永磁体磁链0.28Wb,极对数为3。直流母线电压为300 V,定子磁链给定为0.28Wb,磁链滞环宽度为0.01Wb,转矩滞环宽度为0.2 N·m,系统采样周期为100μs。电机稳态运行时速度为600 r/min,负载转矩为10 N·m。图7和图8为两种DTC控制方法稳态运行时相电流及其谐波分析和转矩的仿真波形,仿真结果表明采用中间矢量进行直接转矩可以明显减少6k±1(k=1,3,5,…)次谐波电流,两种控制方法转矩脉动差别不大。
实验平台如图9所示:控制器采用Infineon公司的XE164高性能微控制器,该控制器可产生18路PWM信号,电机采用实验室改装的隐极式双三相永磁同步电机。
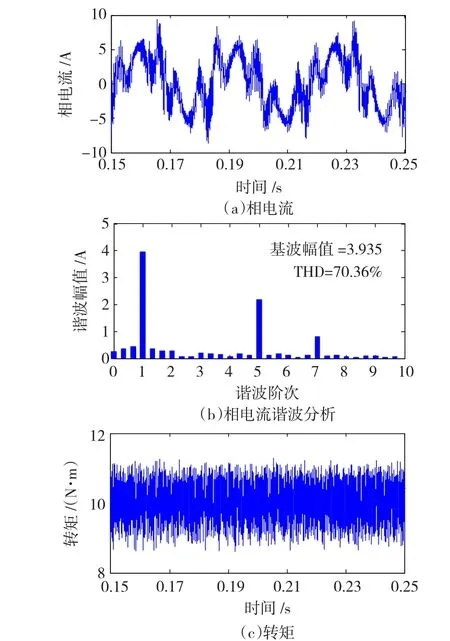
图7 基本矢量DTCFig.7 Basic vector DTC
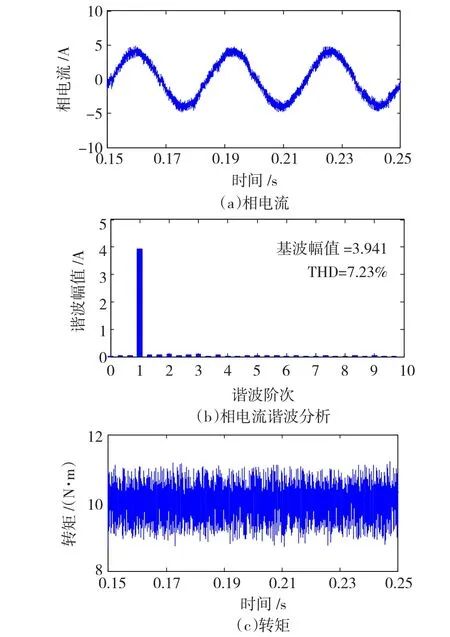
图8 中间矢量DTCFig.8 Intermediate vector DTC
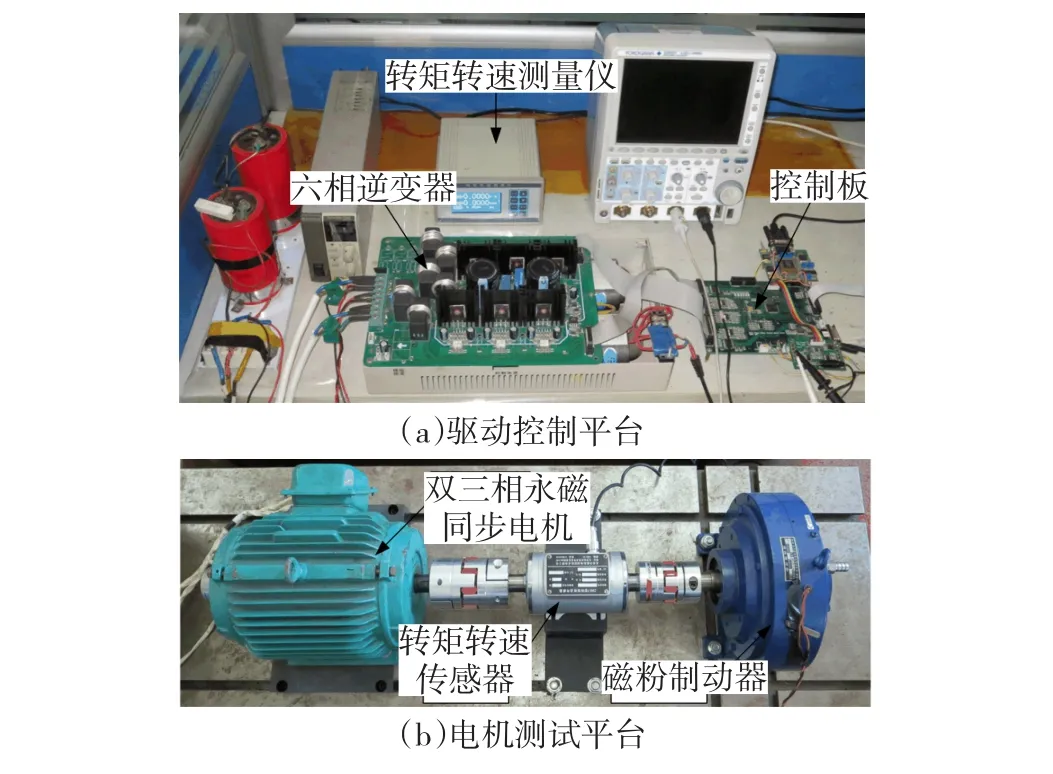
图9 实验系统平台Fig.9 Experiment system platform
图10 为两种DTC控制方法下稳态运行时的电流实验波形,实验结果和仿真分析一致,图10中ia和id是通过AD采样得到A相和D相电流,iα和iz1是相电流通过矢量空间解藕转换实时计算出来的α-β子平面和z1-z2子平面上的电流,其中相电流ia等于iα与iz1之和。
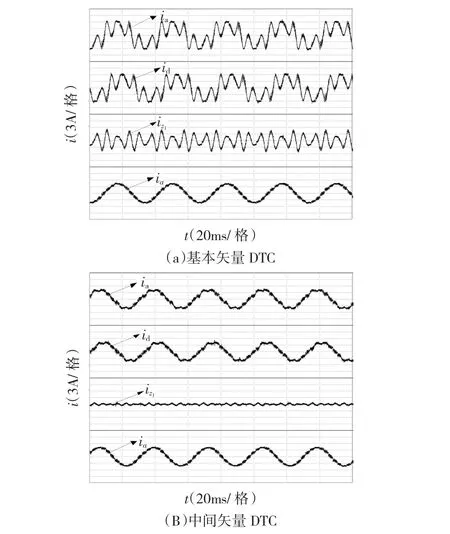
图10 稳态运行时电流波形Fig.10 The experiment waveform s of currents under the situation of steady state
通过图10(a)和图10(b)比较可见采用基本矢量(大矢量)时z1-z2子平面含有大量的5、7次谐波电流,而采用修正后的中间矢量z1-z2子平面的谐波电流明显减少,由于电机气隙磁场不是理想的正弦波以及逆变器死区效应等非线性因素影响,z1-z2子平面还会存在少量的谐波电流。
图11为给定速度由600 r/min阶跃变化到1 000 r/min时,电机的转速和转矩变化波形。采用基本矢量(大矢量)的速度响应时间为230ms,采用中间矢量的速度响应时间为235 ms,两种控制方法转矩脉动没有明显区别。可见两种DTC控制方法的动静态性能差别不大。
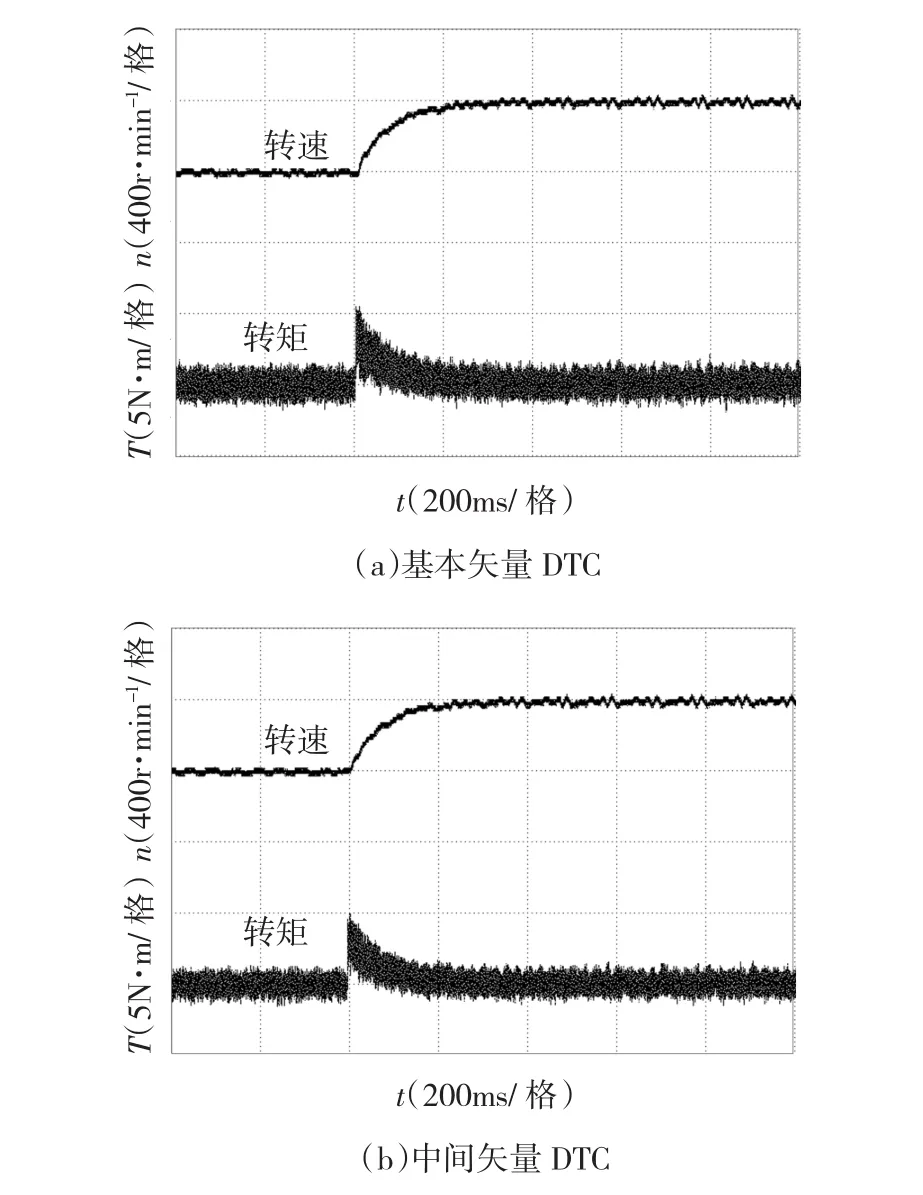
图11 加速运行时的转速和转矩波形Fig.11 The experiment waveforms of speed and torque under the situation of accelerated state
5 结 论
本文通过理论分析,仿真及实验验证对双三相永磁同步电机直接转矩控制谐波电流抑制进行了深人研究,得到以下结论:
1)双三相永磁同步电机直接转矩控制采用基本矢量存在大量6k±1(k=1,3,5,…)次谐波问题,需要对基本矢量进行修正,采用修正后的中间矢量很好的抑制了z1-z2子平面的谐波电流。
2)中间矢量有不同的实现方法,可以对中间矢量进行中心化处理,以简化其硬件实现过程。
3)本文提出的方法具有通用性,针对其他多相电机例如五相电机直接转矩控制所存在谐波电流问题同样适用。
[1] ZHONG L,RAHMAN M F,HU W Y,et al.Analysis of direct torque control in permanentmagnet synchronousmotor drives[J]. IEEE Transactions on Power Electronics,1997,12(3):528 -536.
[2] CASADEID,SERRA G,TANI A.Implementation of a direct torque control algorithm for induction motors based on discrete space vectormodulation[J].IEEE Transactions on Power Electronics,2000,15(4):769-776.
[3] BUJA G S,KAZMIERKOWSKIM P.Direct torque control of PWM inverter-fed AC motors—a survey[J].IEEE Transactions on Industry Electronics,2004,51(4):744-757.
[4] ZHAO Yifan,LIPO T A.Space vector PWM control of dual threephase induction machine using vector space decomposition[J]. IEEE Transactions on Industry Applications,1995,31(5):1100 -1109.
[5] BOJOIR,LAZZARIM,PROFUMO F,et al.Digital field-oriented control for dual three-phase inductionmotor drives[J].IEEE Transactions on Industry Applications,2003,(3):752-760.
[6] LIShan,XIAO Huihui,CHEN Hongyan.The research of SVPWM control technique of double three-phase induction machine[C]//Proceedings of the 8th International Conference on Electrical Machines and systems,September 27-29,2005,Nanjing,China.2005:109-114.
[7] 杨金波,杨贵杰,李铁才.六相电压源逆变器PWM算法[J].电工技术学报,2012,27(7):205-211.
YANG Jinbo,YANG Guijie,LI Tiecai.PWM techniques for six-phase voltage-source Inverters[J].Transactions of China Electrotechnical Society,2012,27(7):205-211.
[8] LEVIE,BOJOIR,PROFUMO F,etal.Multiphase inductionmotor drives-A technology status review[J].IET Electric Power Applications,2007,1(4):489-516.
[9] ZHENG Libo,FLETCHER JE,WILLIAMSBW,et al.A novel direct torque control scheme for a sensorless five-phase induction motor drive[J].IEEE Transactions on Industrial Electronics,2011,58(2):503-513.
[10] 朱鹏,张晓锋,乔鸣忠,等.三次谐波电压注人的五相感应电机SVM-DTC方法[J].电机与控制学报,2010,14(9):13 -18. ZHU Peng,ZHANG Xiaofeng,QIAO Mingzhong,et al.Five phase induction motor SVT-DTC strategies with third harmonic voltage injection[J].Electric Machines and Control,2010,14 (9):13-18.
[11] 孟超,欧阳红林,刘鼎,等.基于模糊逻辑和重构电压矢量的双Y移30°PMSM直接转矩控制[J].中国电机工程学报,2011,31(24):59-67. MENG Chao,OUTANG Honglin,LIU Ding,etal.Direct torque control for dual Y dhift30 degree permanent-magnet synchronous motor based on fuzzy logic and rebuilding voltage vector[J]. Proceedings of the CSEE,2011,31(24):59-67.
[12] HATUA K,RANGANATHAN V T.Direct torque control schemes for split-phase inductionmachine[J].IEEE Transac-tions on Industry Applications,2005,41(5):1243-1254.
[13] BOJOIR,FARINA F,GRIVA G,etal,Direct torque control for dual three-phase induction motor drives[J].IEEE Transactions on Industry Applications,2005,41(6):1627-1636.
[14] MOGHADDASIAN M,NATEGH S,KIANINEZHAD R,et al. A direct torque control(DTC)method for dual three phase induction motors using a fuzzy inference system[C]//2008 International Symposium on Power Electronics,Electrical Drives,Automation and Motion,June 11-13,2008,Ischia,Italy. 2008:1088-1092.
[15] 杨金波,杨贵杰,李铁才.双三相永磁同步电机的建模与矢量控制[J].电机与控制学报,2010,14(6):1-7. YANG Jinbo,YANG Guijie,LI Tiecai.Modeling and vector control for dual three-phase PMSM[J].Electric Machines and Control,2010,14(6):1-7.
(编辑:刘琳琳)
Harmonic currents suppression in direct torque control of dual three-phase permanentmagnet synchronousmotor
ZHOU Chang-pan, SU Jian-yong, YANG Gui-jie
(School of Electrical Engineering and Automation,Harbin Institute of Technology,Harbin 150001,China)
There are a great quantity of 6k±1(k=1,3,5,…)harmonic currents in the z1-z2sub-plane when the basic voltage vectors are adopted in switching-table-based direct torque control(DTC)for dualthree phase permanentmagnet synchronousmotor(PMSM)drives.By introducing the principle of pulse width modulation,the voltage vector wasmodified,and themodified intermediate vector was centralized for simplifying the hardware implementation.Both simulation and experimental results demonstrate that the harmonic currents in the z1-z2sub-plane can be suppressed significantly when themodified intermediate vectors are adopted for DTC,so the system losses are reduced.Furthermore,the static and dynamic performances of the control system are not affected.
dual three-phase permanentmagnet synchronousmotor;direct torque control;harmonics suppression; pulse width modulation
10.15938/j.emc.2015.09.007
TM 351
A
1007-449X(2015)09-0046-08
2014-08-16
国家自然科学基金面上项目(51177026);高等学校博士学科点专项科研基金(20132302120005);中央高校基本科研业务费专项资金资助(HIT.NSRIF.2014013)
周长攀(1986—),男,博士研究生,研究方向为多相电机驱动与控制;苏健勇(1979—),男,博士,讲师,研究方向为电机驱动与控制;杨贵杰(1965—),男,教授,博士生导师,研究方向为一体化电机系统驱动与控制等。
周长攀