天线面板重力变形的主动控制量计算方法研究∗
2015-06-27丽1仲伟业1乔海花1刘国玺4钱宏亮5
付 丽1,2,3† 仲伟业1,3 乔海花1 刘国玺4 钱宏亮5
(1中国科学院上海天文台上海200030) (2中国科学院行星科学重点实验室南京210008) (3中国科学院射电天文重点实验室南京210008) (4中国电子科技集团公司第54研究所石家庄050081) (5哈尔滨工业大学威海分校威海264209)
天线面板重力变形的主动控制量计算方法研究∗
付 丽1,2,3† 仲伟业1,3 乔海花1 刘国玺4 钱宏亮5
(1中国科学院上海天文台上海200030) (2中国科学院行星科学重点实验室南京210008) (3中国科学院射电天文重点实验室南京210008) (4中国电子科技集团公司第54研究所石家庄050081) (5哈尔滨工业大学威海分校威海264209)
提出了理想反射面及2参数、5参数和6参数最佳吻合抛物面方法,计算大型卡氏天线结构重力变形后主反射面板的调整量和对应的副反射面调整量,同时分析馈源偏焦对天线电性能的影响.以上海天文台天马65 m望远镜(TM65m)为研究对象,综合对比分析促动器调整量、6杆并联机构调整量、主反射面精度及偏焦后天线指向变化等,认为针对实际结构而言,经过调整修正后,6参数最佳吻合抛物面方法可以作为高精度天线理想的计算面板变形主动控制量方法,计算结果为天线的主动控制提供初调数据.
望远镜,方法:数据分析,技术:其他诸多方面
1 引言
大型天线结构在重力[1−2]、风、温度和雪等载荷作用下会发生变形,从而影响天线面形精度和指向精度.为提高天线精度,满足高频段的科学观测对天线精度的要求,学者们提出了利用主动面系统和副反射面调整机构来修正各因素引起的主反射面变形和副反射面刚体运动.目前采用实时调整主动反射面技术的天线有美国GBT(Green Bank Telescope)100 m射电望远镜[3]、意大利Noto 34 m射电望远镜[4]、意大利SRT(Sardinia Radio Telescope)64 m射电望远镜[5]、TM65m[6]及在建的FAST(500 m口径球面射电望远镜)[7].图1为TM65m是否采用主动反射面技术天线效率对比图,结果显示在主动控制后,天线效率明显提高.
主动面系统中促动器如何调整与天线表面误差直接相关.根据相对参照物不同,天线表面误差可分为相对于理想反射面的表面误差[8]、相对于最佳吻合抛物面的表面误差[8]和相对于最佳吻合反射面的表面误差[9].另外,还有学者提出了一些新拟合算法[10−11].根据实际反射面与理想反射面的几何关系及物理意义,表面误差又可分为轴向误差、径向误差、法向误差和半光程差等.本文讨论的是相对于理想反射面和最佳吻合抛物面的法向误差.

图1 是否采用主动面时天线效率对比图[6]Fig.1 Contrast fi gure of antenna efficiency with and without active surface control[6]
本文以TM65m为研究对象,以有限元分析获得的不同俯仰角下面板各支撑点的重力变形为依据,分别采用理想反射面及2参数、5参数和6参数最佳吻合抛物面方法,计算各点的法向误差,以此作为主动面系统中促动器的调整依据.同时,根据拟合的最佳吻合抛物面的顶点变化及副反射面自重下的刚体位移,计算副反射面的调整量.另外,计算主副反射面调整后馈源偏焦对天线电性能的影响.综合对比主反射面面板调整量、6杆并联机构调整量及馈源偏焦影响等,认为经过指向修正、馈源位置微调及构建多波束平台,6参数最佳吻合抛物面方法为高精度天线理想的计算面板变形主动控制量方法.
2 主动面系统和副反射面调整机构描述
TM65m为全方位可动大型天线.天馈分系统由天线主反射面、副反射面和馈源网络组合等组成.天线主副反射面采用修正型卡赛格伦天线.馈源网络组合由L、S/X、C、Ku、K、X/Ka和Q频段7套馈源网络组成.
2.1 主动面系统
如图2所示,TM65m主动面系统主要由主控计算机、控制总线、主控箱、分控箱、促动器及供电单元等组成[12].系统通过控制分布在天线面板与背架间的1 104台促动器(工作量程为±15 mm),使促动器法兰上的4根自适应螺杆和调节件沿轴向运动,调整天线主反射面恢复到设定曲面,抵消不同俯仰角下的自重变形,提高天线的接收效率.
2.2 副反射面调整机构
为了补偿由于重力变形而引起的天线性能和指向的变化以及L频段馈源工作的需求,采用6杆并联机构对天线副反射面进行5个自由度(x、y、z方向平移及x、y方向旋转)的实时调整,详见图3.

图2 主动面系统[12](a)和安装在背架上单台促动器(b)Fig.2 The active surface system[12](a)and an actuator set on the backup structure(b)

图3 副反射面调整结构示意图1Fig.3 The schematic diagram for subre fl ector adjustment mechanism1
6杆并联机构是用6根支杆将上下两平台连接而形成的空间多环并联机构,上平台称为动平台,下平台称为定平台.每根支杆都可以独立的自由伸缩,他们用虎克铰与定平台联接,用球铰与动平台联接,这样动平台相对于定平台可在3维空间做任意方向的移动和绕任意方向、位置的轴线转动.
将定平台与副反射面支撑机构连接,动平台与副反射面连接,通过调控6杆的伸缩运动实现副反射面5个自由度的实时调整.
3 基本概念及原理
本文以TM65m为研究对象,以有限元分析的不同俯仰角下(5◦间隔)的自重变形数据为基础,针对主动面系统中促动器的调整量问题提出以下4种促动器调整方案:
(1)基于理想反射面的调整方法:以天线中心体为基准,在不同俯仰角下,都调整到设计的面形.
(2)基于6参数最佳吻合抛物面的调整方法:以相对于设计抛物面的顶点位移、焦轴的方向及焦距的变化为参数求最佳吻合抛物面,在不同俯仰角下,都调整到最佳吻合抛物面.
(3)基于5参数最佳吻合抛物面的调整方法:以相对于设计抛物面的顶点位移和焦轴的方向为参数求解最佳吻合抛物面,在不同俯仰角下,都调整到最佳吻合抛物面.
(4)基于2参数最佳吻合抛物面的调整方法:以相对于设计抛物面焦轴的方向为参数求最佳吻合抛物面,在不同俯仰角下,都调整到最佳吻合抛物面.
在主反射面板的4种调整方案中提及理想反射面、法向误差和最佳吻合抛物面等概念,下面将对基本概念及计算原理逐一进行阐述.另外,还介绍了副反射面实时补偿量的计算方法及等效馈源偏焦量的计算原理.
3.1 理想反射面及法向误差
针对赋型卡塞格伦天线,利用反射定律、能量守恒和等光程原理,对标准卡塞格伦天线进行赋型设计,确定了主反射面的形状,即为本文中提到的理想反射面.
有限元分析获得的结果为各点的轴向误差,而促动器调整量的参考依据为各点的法向误差,法向误差与轴向误差的几何关系如图4所示,由图示的几何关系得法向误差的计算公式为

式中Δn为法向误差,Δz为z轴方向的误差,φ为副面边缘对主面焦点的半张角.根据抛物线的几何关系可得cos的计算公式为

式中f为焦距,x为图4中P点的纵坐标,F为焦点.
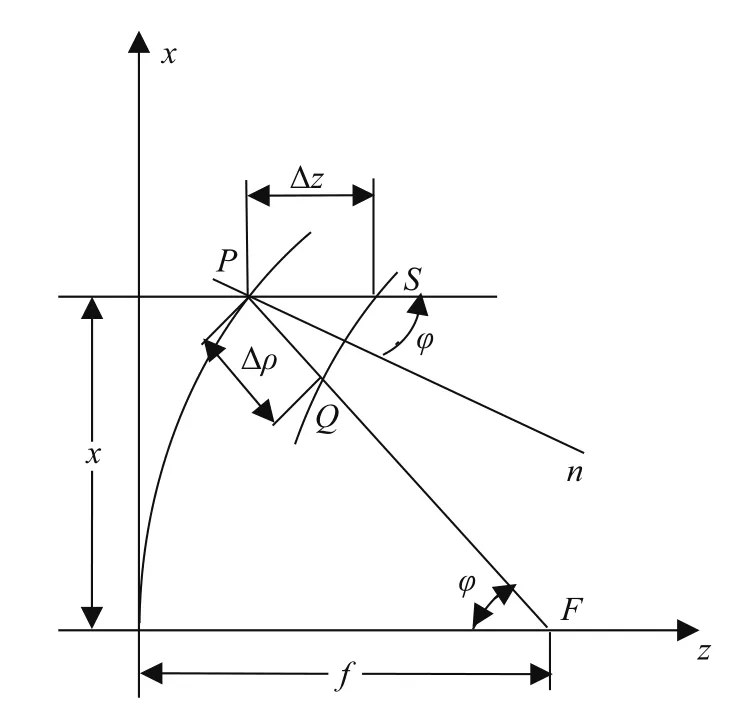
图4 法向误差与轴向误差的关系Fig.4 The relationship between normal error and axial error
基于理想反射面的调整方法即以天线中心体为基准,在不同俯仰角下,计算出各点的法向误差,并通过促动器调节面板,将抛物面调整到理想反射面.利用有限元软件模拟分析天线结构在自重作用下的变形,并提取面板各支撑点的坐标x、y、z及在3个方向的位移Δx、Δy、Δz.以(1)~(2)式为基础,编译程序,并根据提取的数据,最终可以计算出各点的法向误差.
3.2 最佳吻合抛物面
基于各点变形数据,以顶点的移动、转动和焦距变化为参数作拟合抛物面,这样的抛物面可以作无数个,而其中变形后的反射面相对理想反射面的均方根偏差最小的抛物面,我们称之为最佳吻合抛物面.由此,我们得6参数最佳吻合抛物面,即要保证抛物面顶点位移uA、vA、wA,焦轴的方向φx、φy和焦距变化h等6个参数(具体如图5所示)使变形后的反射面与最佳吻合抛物面的法向偏差Δn2最小,其数学表达式为

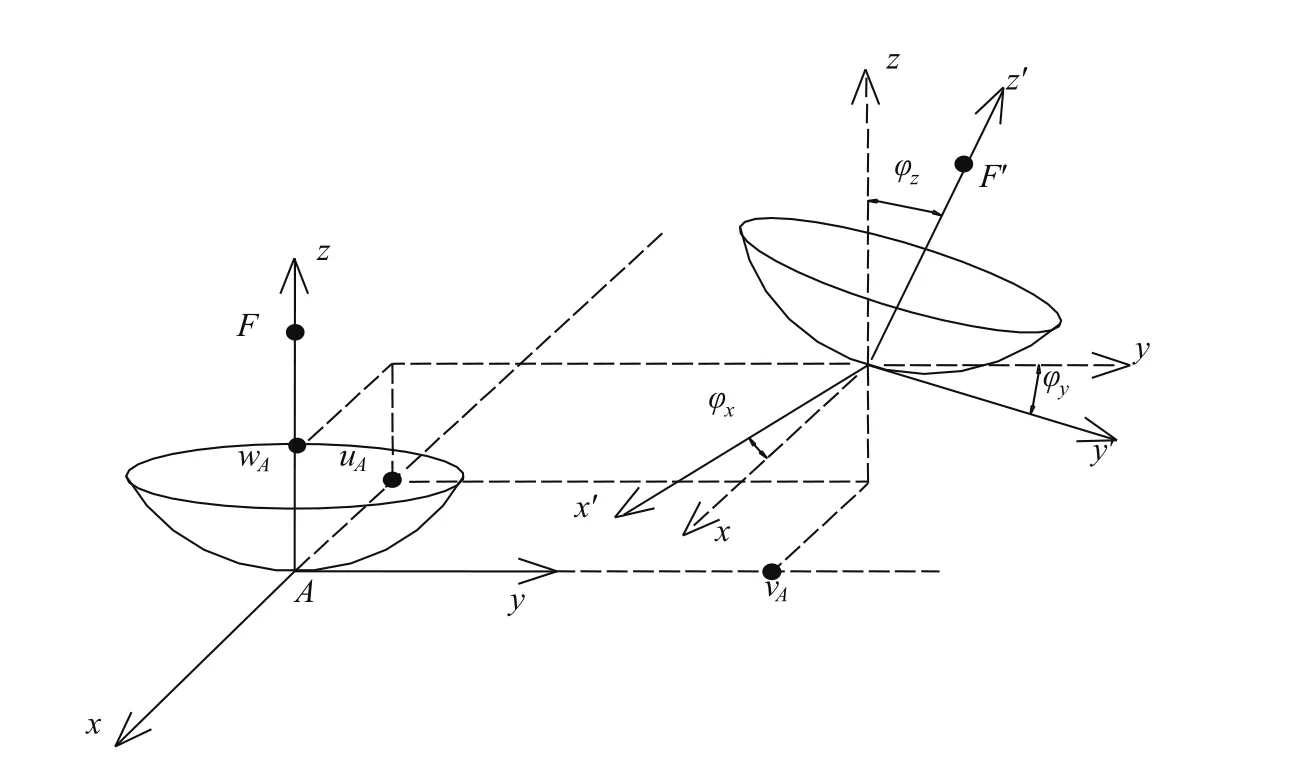
图5 6参数最佳吻合抛物面位置及形状示意图Fig.5 The schematic diagram of the location and shape of six-parameter best- fi t paraboloid
解方程(5)得UA、VA、WA、H、φx、φy,由此最佳吻合抛物面便可完全确定,计算各点与最佳吻合抛物面的法向偏差Δn,即

最终可以计算出天线主反射面的面形精度.
基于6参数最佳吻合抛物面算法包含6个参数,在不同俯仰角下不仅抛物面顶点发生变化,而且抛物面的形状也随之改变,以此方法为依据调节天线涉及主反射面各面板支撑点变化、副反射面整体变化及馈源偏焦等问题.在天线使用初期,秉承天线的调节由简到繁的原则,同时对比分析上述提到的问题.
除了理想反射面调整法和6参数最佳吻合抛物面调整法外,还提出了5参数和2参数最佳吻合抛物面调整法.5参数最佳吻合抛物面包含抛物面顶点位移和焦轴方向变化等5个参数,此时不同俯仰角下抛物面形状保持不变.5个参∑数也是通过(5)式进行求解,只是去掉了系数矩阵中的第4行和第4列及变量H和常数项QBZ0.相似地,2参数最佳吻合抛物面只考虑焦轴方向的变化,对应(5)式中的系数矩阵简化为2×2的矩阵.
3.3 副反射面实时补偿量计算方法
天线的调节主要包括两部分:一是通过主动面系统中的促动器调节主反射面面板以保证主反射面的面形精度;二是通过副反射器中的6杆并联机构调节副反射面的位移和转角,保证副反射面与主反射面在同一轴线上,同时保证焦距满足要求.

式中xSR、ySR和zSR是由有限元分析结果中提取的(不同俯仰角下的分析结果均需旋转到90◦),此部分为考虑副反射面自重下刚体平移,而等式右边剩余部分为考虑最佳吻合抛物面顶点变化引起的副反射面的改变.因此,副反射面在oxyz坐标系中的位置调整量分别为ΔxSR、ΔySR、ΔzSR,副反射面的转动量为副反射面自重下刚体转动和最佳吻合抛物面焦轴旋转的线性叠加.
3.4 馈源偏焦
针对卡塞格伦天线的馈源偏焦问题,采用等效抛物面(虚抛物面)取代卡塞格伦天线的主、副反射面,从而把卡氏天线的问题简化为馈源相同、抛物面口径和直径相同,但焦距增大了M倍的单反射面来进行定量分析[13].如图6所示,馈源偏焦问题简化为等效的横向偏焦量δx和纵向偏焦量δz,即

式中δhx和δhz分别为馈源的横偏和纵偏;δsx和δsz分别为副反射面的横偏和纵偏;rs为副反射面绕顶点的转角;N为副反射面顶点至焦点Fv的距离.针对TM65m,副反射面具有3个方向的位移和2个方向的转角等5个自由度,因此,δsx、δsz和rs为零,进而简化了(9)式.

图6 卡氏天线的偏焦[8]Fig.6 The o ff set focus of the Cassegrain antenna[8]
4 结果
基于天线的基本概念和原理,对天线主反射面板的调整量、副反射面的调整量及馈源偏焦对电性能的影响进行分析.下面将从这3方面逐一介绍分析结果.
4.1 主反射面板调整量
对5◦间隔的促动器调节量数据进行分析,得不同俯仰角下的RMS如图7所示.图7(a)为基于理想反射面的调整方法获得的结果,从图中可看出当俯仰角为5◦和90◦时RMS最大,其值为8.3 mm.以天线中心体为基准,抛物面轴线与基准面垂直,在不同俯仰角下,都调整到设计的面形,此调整方法是最理想的.基于此方法分析得,需要调整的最大值达15.8 mm,而促动器的最大行程为±15 mm,因此基于理想反射面的调整方法是否可以作为备选的调整方法需要进一步研究.
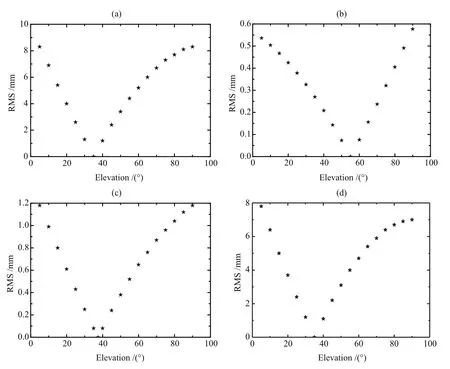
图7 不同俯仰角下的RMS.(a)基于理想反射面的调整方法;(b)基于6参数最佳吻合抛物面的调整方法;(c)基于5参数最佳吻合抛物面的调整方法;(d)基于2参数最佳吻合抛物面的调整方法Fig.7 The RMS under di ff erent elevation angles.(a)The adjustment method based on an ideal re fl ector; (b)The adjustment method based on six-parameter best- fi t paraboloid;(c)The adjustment method based on fi ve-parameter best- fi t paraboloid;(d)The adjustment method based on two-parameter best- fi t paraboloid
对促动器需要在正负方向进行调整的最大值进行统计分析,发现在最外面两环的促动器调节量较大(如图8所示),提取最外环z=6260.66699 mm的部分促动器的调节量(共96个促动器)如图9所示,由图示可知:部分促动器单向最大调整量超过允许值15 mm,但是正负向最大值的绝对值之和没有超出30 mm,且单向最大超出5%,因此可以通过调节促动器的零位来实现对面板的精确调整.另外,从图8中可看出:调节量较大的促动器的位置是在最外面两环上,对天线的性能影响较小,所以基于理想反射面的调整方法可以作为调整的方法之一.类似地,基于6参数、5参数和2参数最佳吻合抛物面的基本理论对相同的数据进行分析,得不同俯仰角下RMS如图7(b)、(c)、(d)所示.

图8 超限促动器位置Fig.8 The location of actuators out of the threshold
以相对于设计抛物面的顶点位移、焦轴的方向及焦距的变化等6个变量为参数求最佳吻合抛物面,在不同俯仰角下,都调整到最佳吻合抛物面.基于上述理论对数据进行分析,通过优化计算得最佳调整角为55◦.此方案的促动器调整量最小,最大值为2.2 mm.但抛物面顶点和轴线及焦距都会变化,提高了天线主动控制的难度.而且最佳吻合抛物面会偏离设计抛物面,需要进一步分析此时天线的电性能变化.因此,如果天线主反射面板和副反射面都可调节,同时电性能变化不大,那么基于6参数最佳吻合抛物面的调整方法是比较理想的调整方法.
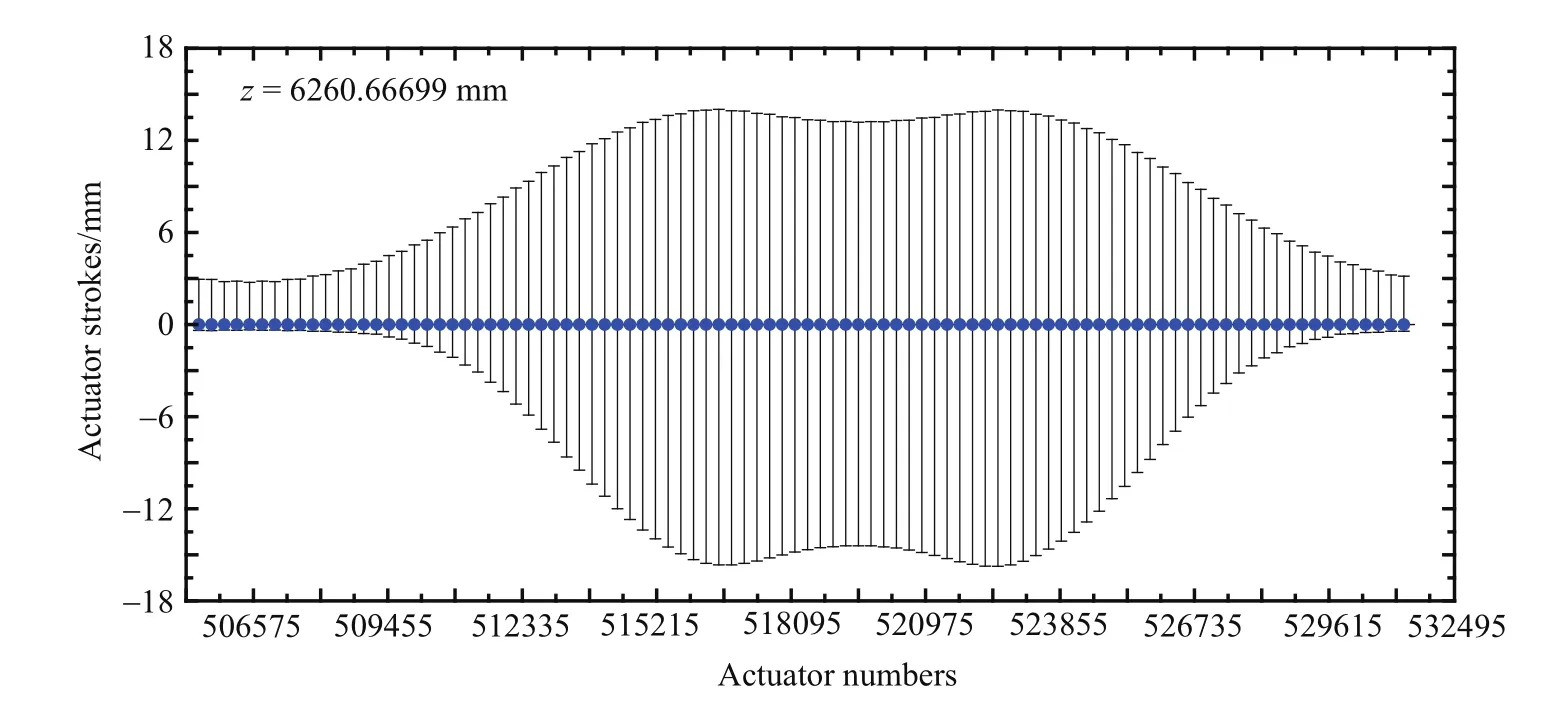
图9 部分促动器行程(z=6260.66699 mm)Fig.9 The stroke of part actuators(z=6260.66699 mm)
以相对于设计抛物面的顶点位移、焦轴的方向变化等5个变量为参数求最佳吻合抛物面,在不同俯仰角下都调整到最佳吻合抛物面.分析得不同俯仰角下的RMS如图7(c)所示,由图所示可知,当俯仰角为5◦和90◦时,RMS均为1.18 mm.该方案的调整量较小,最大值为3.7 mm.5参数与6参数的调整方法调节难度相同,即主副反射面都需要调节.不同的是该方案焦距不变,即不同俯仰角下抛物面形状不变.如果天线主副反射面都具有主动控制的能力,那么基于5参数最佳吻合抛物面的调整方法也可以作为参考的调整方法之一.
以相对于设计抛物面的焦轴方向的变化等2个变量为参数求最佳吻合抛物面,在不同俯仰角下,都调整到最佳吻合抛物面.对数据分析得不同俯仰角下的RMS如图7(d)所示,从图中可看出,当俯仰角为5◦时RMS最大为7.8 mm.该方案的调整量较大,最大调整量达10.4 mm,而且抛物面顶点需要变化,因此基于2参数最佳吻合抛物面的调整方法不是最佳的调整方法.
具体哪种方案更优,需要进一步对比分析副反射面调整量及馈源偏焦对电性能影响.
4.2 副反射面调整量
赋型卡塞格伦天线主副反射面的位置关系如图6所示.基于理想反射面的调整方法中副反射面的调整思路为:根据副反射面在自重下的刚体位移进行调整,保证主副反射面同轴线,且焦距为20.8 m.
6参数最佳吻合抛物面方法中副反射面的调整思路为:由拟合计算后,获得主反射面的顶点、焦轴的方向及焦距变化参数,以这6个参数为参考,同时附加副反射面在自重作用下的刚体位移,计算得副反射面最终需要调整量如图10所示.在计算时发现相较于x方向和z方向的位移量级,其他参数的变化可以忽略不计.由图示可知,调整量随着俯仰角的升高而逐渐变大,且在x方向需要调整的量较大.
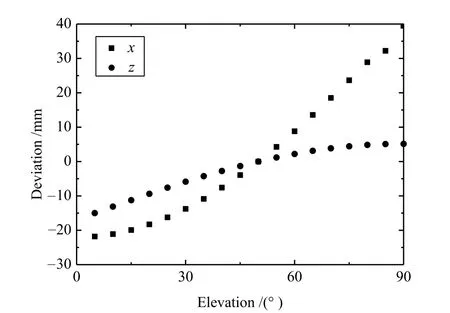
图10 不同俯仰角下副反射面调整量Fig.10 The deviations of subre fl ector under di ff erent elevation angles
4.3 馈源偏焦对电性能影响分析
基于6参数最佳吻合抛物面方法,计算得到主反射面顶点变化及对应的副反射面调整量.然后借助仿真软件分析由于主、副反射面变化引起的馈源偏焦对天线电性能的影响,其中,工作波段取X波段(波长λ=36 mm)和Q波段(波长λ=7 mm)进行仿真.
图11中显示为X波段馈源无偏焦(δz=0)及轴向偏焦量分别为δz=0.25λ和δz= 0.50λ时的方向图,由图示可知,随着偏焦量的增大,增益无变化,最大辐射方向不变,仍在抛物面的轴线方向,副瓣电平变化不大.天线轴向最大偏焦量小于0.50λ,由此可见,在X波段轴向偏焦对天线电性能影响不大.
X波段馈源无偏焦(δx=0)及横向偏焦量分别为δx=0.5λ、δx=1.0λ和δx= 1.25λ时的方向图如图12所示,由图示可知,随着偏焦量的增大,天线方向图主瓣最大辐射方向偏离轴线的角度逐渐增大,主瓣偏转方向恰好与偏焦方向相反,旁瓣一边增大,一边减小,方向图变得不对称,主瓣宽度变化不大,增益无损失.天线横向最大偏焦量介于1.0λ和1.25λ之间.当δx=1.25λ时,主瓣指向偏差为0.018◦,副瓣电平为(−31.930,−32.539),旁瓣升高0.408 dB.
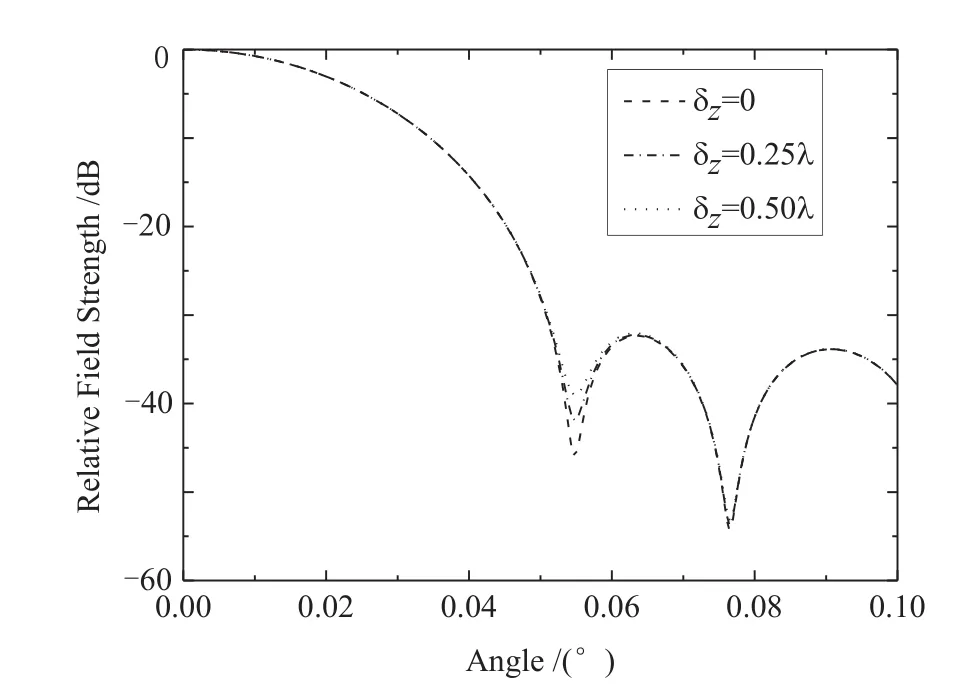
图11 轴向偏焦时的方向图(X波段)Fig.11 The radiation pattern of axial o ff set-focus(X band)

图12 横向偏焦时的方向图(X波段)Fig.12 The radiation pattern of lateral o ff set-focus(X band)
图13和14分别为Q波段轴向和横向偏焦时的方向图.轴向偏焦δz=−2.2λ时,副瓣电平升高1.75 dB.横向偏焦δx=5.7λ时,主瓣指向偏差0.016◦.

图13 轴向偏焦时的方向图(Q波段)Fig.13 The radiation pattern of axial o ff set-focus(Q band)

图14 横向偏焦时的方向图(Q波段)Fig.14 The radiation pattern of lateral o ff set-focus(Q band)
5 结论
以TM65m为研究对象,基于数值模拟不同俯仰角下天线结构重力变形数据,对比分析了4种天线面板重力变形的主动控制量及主反射面的面形精度,结果显示基于6参数最佳吻合抛物面法主反射面精度最高,最大RMS为0.58 mm,促动器调整量最小,其最大调整量为2.2 mm.针对拟合的主反射面,副反射面做相应调整后,得Q波段馈源轴向和横向最大偏焦时副瓣电平升高1.75 dB,主瓣指向偏差0.016◦.文中结果均为仿真结果,计算馈源偏焦对天线电性能影响为极端情况,实际上,天线馈源位置可以微调,另外主瓣指向偏差为规律变化的误差,可以通过指向模型进行修正,而且目前正在进行多波束研究工作.因此,认为经过一系列的调整修正后,基于6参数最佳吻合抛物面方法为理想的面板重力变形的主动控制量的计算方法.该方法提供的计算数据将作为天线在跟踪过程中进行主反射面开环实时校正的初始数据.进一步工作将分析实际馈源偏焦后天线效率的变化及风和温度等对天线精度的影响.
致谢 感谢中国科学院上海天文台钱志翰研究员对本文研究工作给予的指导.
[1]左营喜,李阳,孙继先,等.天文学报,2011,52:152
[2]Zuo Y X,Li Y,Sun J X,et al.ChA&A,2011,35:439
[3]Prestage R M,Constantikes K T,Balser D S,et al.Proceedings of the SPIE,2004,5489:1029
[4]Orfei A,Morsiani M,Zacchiroli G,et al.The Active Surface System on the Noto Radio Telescope. The 6th European VLBI Network Symposium,Bonn,June 25-28,2002
[5]Zacchiroli G,Fiocchi F,Maccaferri G,et al.MSAIS,2006,126:126
[6]Shen Z Q.Shanghai 65m Radio Telescope.General Assembly and Scienti fi c Symposium,Istanbu, August 13-20,2011
[7]Nan R D,Li D,Jin C J,et al.IJMPD,2011,20:989
[8]朱钟淦,叶尚辉.天线结构设计.北京:国防工业出版社,1998
[9]闫丰,杜彪.无线电工程,2011,41:38
[10]Wang C S,Duan B Y,Qiu Y Y.Proceedings of ISAP,Seoul,2005:245
[11]王伟.机械结构因素对反射面天线电性能的影响机理及应用.西安:西安电子科技大学,2012
[12]张锦峰.射电望远镜天线主反射面主动调整系统的电磁兼容设计.上海:上海交通大学,2012
[13]Peter W H.IRE Transactions on Antennas and Propagation,1961:140
Research on the Calculated Methods of Active Control Value for Antenna Panel Deformations under Gravity
FU Li1,2,3ZHONG Wei-ye1,3QIAO Hai-hua1LIU Guo-xi4QIAN Hong-liang5
(1 Shanghai Astronomical Observatory,Chinese Academy of Sciences,Shanghai 200030) (2 Key Laboratory of Planetary Sciences,Chinese Academy of Sciences,Nanjing 210008) (3 Key Laboratory of Radio Astronomy,Chinese Academy of Sciences,Nanjing 210008) (4 The 54th Research Institute of China Electronics Technology Group Corporation,
Shijiazhuang 050081) (5 Harbin Institute of Technology,Weihai 264209)
The methods of ideal re fl ector surface,two-parameter, fi ve-parameter, and six-parameter best- fi t paraboloid are presented in this paper.Based on these methods,the adjustment values of gravity deformations are calculated for the main re fl ector of large-scale Cassegrain antenna.Accordingly,the positions of subre fl ector are corrected,and the e ff ects of o ff set-focus on electric performance are also analyzed. Taking Shanghai 65 m antenna as a research object,the adjustment values of actuator and hexapod,the accuracy of the main re fl ector surface,and the pointing error after o ff setting the focus are contrasted.As a result,the method of six-parameter best- fi t paraboloid is ideal to calculate active control value for antenna panels after the e ff ects of feed defocus have been adjusted and modi fi ed.The results o ff er data for the active control of antenna.
telescopes,methods:data analysis,techniques:miscellaneous
P111;
:A
2014-11-17收到原稿,2014-12-17收到修改稿
∗上海市科学技术委员会科研计划项目(08DZ1160100)、中国科学院知识创新工程重大项目(KJCX-YW-18)、国家自然科学基金项目(Y347201001)资助
†fuli@shao.ac.cn
10.15940/j.cnki.0001-5245.2015.04.008
1上海65米射电望远镜天线系统方案设计报告,2009
