基于差分相时延的月球车速率测定和动作分析∗
2015-06-27超1刘庆会1鑫1贺庆宝1吴亚军1
潘 超1,2† 刘庆会1‡ 郑 鑫1,2 贺庆宝1,2 吴亚军1,2
(1中国科学院上海天文台上海200030) (2中国科学院大学北京100049)
基于差分相时延的月球车速率测定和动作分析∗
潘 超1,2† 刘庆会1‡ 郑 鑫1,2 贺庆宝1,2 吴亚军1,2
(1中国科学院上海天文台上海200030) (2中国科学院大学北京100049)
2013年12月14日嫦娥三号成功软着陆,随后开展两器分离、两器互拍等任务.利用同波束VLBI(Very long baseline interferometry)技术同时观测着陆器和玉兔月球车发射的信号,解算出的二者之间的差分相时延能够反映月球车位置数厘米的微小变化.基于差分相时延监测月球车动作的高灵敏度,利用月球车移动时的差分相时延数据,求得月球车5次移动的速率,其平均值为0.056 m/s.利用差分相时延1阶多项式拟合后残差的频谱,分析了月球车移动过程中的抖动情况及与月面地形的关系.
月球,技术:干涉,技术:其他诸多方面,方法:解析,方法:其他诸多方面
1 概述
嫦娥三号探测器于北京时间2013年12月14日21时11分在月球虹湾以东地区成功软着陆,着陆点为西经19.51◦,北纬44.12◦.着陆后开始执行两器分离和两器互拍任务.在两器分离和两器互拍过程中着陆器和月球车的距离很近,射电望远镜主波束可同时接收来自两个探测器的信号,满足同波束VLBI观测条件.中国科学院VLBI网4架射电望远镜(上海天马65 m(TM)、北京50 m(BJ)、昆明40 m(KM)和乌鲁木齐25 m(UR))对整个过程采用同波束VLBI技术进行跟踪观测.利用观测得到的着陆器和月球车的信号,提取积分时间0.983 04 s的相关相位,分别计算两个探测器的残余相时延,差分得到含整周模糊度的差分相时延.对两个探测器的相时延进行差分,可以消除中性大气、电离层和观测装置绝大部分的影响[1−5].由于着陆器在月面保持不动,差分相时延的变化主要反映月球车的动作及地球和月球的相对运动.
月球车在月面微小运动,差分相时延会随之发生变化.月球车行走时,差分相时延不同基线相应地快速变大或变小,月球车晃动时,差分相时延也来回晃动[6].基于差分相时延的高灵敏度,我们可以准确地确定月球车动作开始和结束的时间点,进而根据两个停泊点间的距离计算月球车移动的速率.本文利用月球车移动时的差分相时延数据,求取了月球车玉兔在第1个月昼5次移动的速率,并利用差分相时延拟合残差的频谱,分析了月球车移动过程中的抖动情况及与月面地形的关系.本研究提供了一种基于地面测量进行月球车速率测定和动作分析的方法.
2 差分相时延监视月球车动作灵敏度分析
图1给出了VLBI差分相时延监视月球车动作灵敏度的示意图.如图1(a)所示, cτ为VLBI几何时延,cτ=B cosθ,因此,d(cτ)/dθ=−B sinθ.在此,θ约等于仰角.当θ变化很小时,dθ≈Δθ≈−ΔSp/L,d(cτ)=Δ(cτ),因此,

式中B为基线长度,c为光速,τ为时延,L为地月间距离,ΔSp是在天球切面内监视月球车动作的灵敏度[7].

图1 VLBI时延在天球切面内(a)和月球表面(b)的监视灵敏度Fig.1 The monitoring sensitivity of VLBI delay in the plane of the sky(a),and the lunar surface(b)
月球表面在较小的范围内可近似用切平面来表示.由于天球切面内的监视灵敏度ΔSp是月球车实际移动距离ΔSs在天球切面上的分量,所以当月球车在经度λ、纬度ϕ的月球表面移动时,监视灵敏度可按下述方法计算.图1(b)给出了纬度ϕ对灵敏度的影响(经度λ的影响类似).当月球车在月球表面移动ΔSs的距离,其在天球切面内的分量ΔSp为:ΔSp=ΔSscosϕ.因此,当月球车处于经度λ、纬度ϕ的月球表面时,其灵敏度为:

以较短的北京-昆明基线(B=2160 km)为例,差分相时延随机误差0.5 ps相当于0.15 mm[6],假设仰角θ为30◦,地月间距离为380 000 km.嫦娥三号探测器着陆点位于经度λ=−19.5124◦=−0.34 rad,纬度ϕ=44.1206◦=0.77 rad,月球车动作的监视灵敏度估算如下:

3 月球车移动时段的截取和速率的测定
根据差分相时延随时间的变化趋势,我们可以监测月球车在月面移动的情况.由于差分相时延具有超高灵敏度,我们可以准确地确定月球车移动的开始时间和结束时间,由此得出月球车的移动时间.然后由月球车在各停泊点的坐标可以求出每次移动的距离,进而求得每次移动的平均速率.表1给出了月球车在各停泊点A、B、C、D、E、S1的相对于着陆器的坐标,其结果是利用2~3 h的差分相时延数据对月球车进行相对定位得出的,误差为1 m[7].图2给出了月球车在各停泊点之间移动时的北京-昆明基线的差分相时延(DPD).
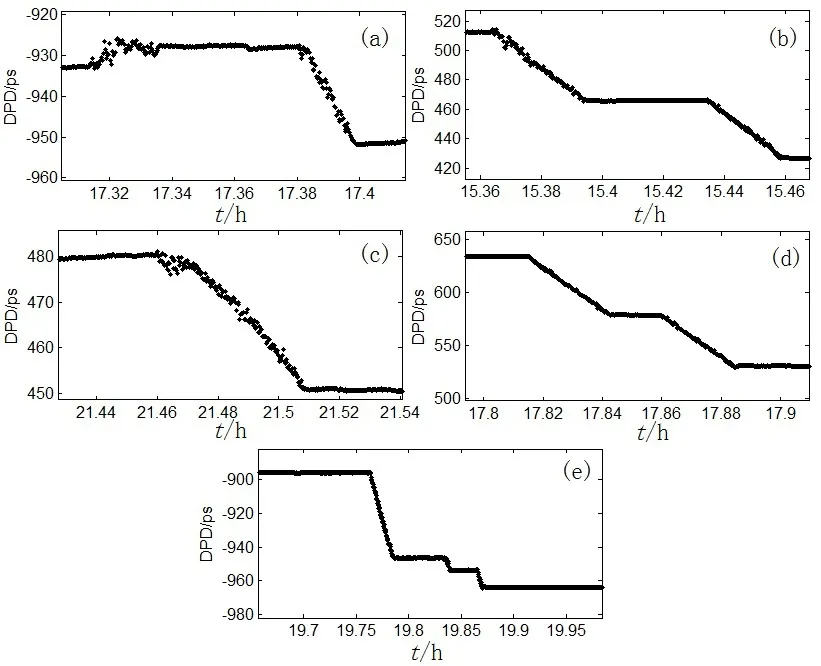
图2 月球车5次移动时的差分相时延Fig.2 The di ff erential phase delay during rover’s 5 movements
图2(a)为12月15日月球车由A点移动到B点的差分相时延.由表1所示A点和B点的坐标可以得到AB间距离为8.24 m.月球车移动了两次,由A点移动到B点共用时142 s,平均移动速率为0.058 m/s.12月20日月球车有2次移动,分别为由B点移动到C点,和由C点移动到D点.其中B到C移动分2步完成,如图2(b)所示.C到D移动1次完成,如图2(c)所示.B到C和C到D的距离、移动时间和平均速率由表2给出.12月21日月球车由D点移动到E点,如图2(d)所示,本次移动分2步完成.23日,月球车由E点移动至S1点,如图2(e)所示.这3点间的距离、移动时间和平均速率由表2给出.这6点间移动的总平均速率为0.056 m/s.

表1 月球车在停泊点的坐标(着陆器位置为坐标原点)Table 1 The coordinates at the parking point of rover(the lander position as the origin of coordinates)

表2 6点间移动的距离、时间和速率Table 2 The moving distance,time,and speed between each two of six points
文献[7]通过对比基于差分相时延测定的月球车上高增益天线与低增益天线之间的相对距离的结果与实际的设计距离的差异(约0.16 m)及其他分析,得出了基于差分相时延测定的月球车停泊点的定位误差为1 m的结论.基于差分相时延的定位结果对应着陆器和月球车天线相位中心间的相对位置,而用星载照相机视觉定位结果对应于着陆器和月球车的机械中心参考点.因此两种定位结果在参考系定义上存在1~2 m的差异[8].这个差异对停泊点间的各段移动速率会有一定影响,但对各段总的平均速率影响不大.根据文献[9]视觉定位的结果,利用本文中求得的各段移动时间,计算得到的总的平均速率为0.053 m/s,与本文求得的平均速率0.056 m/s的差异为0.003 m/s.综合上述讨论,我们认为,由于月球车每一次移动时间不少于100 s,各停泊点的定位精度为1 m,因此,基于差分相时延求得的总的平均速率的误差小于0.01 m/s.
4 基于拟合残差谱的月球车抖动分析
由于月球表面凹凸不平和月球车自身机械构造等原因,月球车在月面移动或转弯过程中,不可避免地会产生晃动.差分相时延具有极高的灵敏度,月球车数厘米微小的晃动也会反映到差分相时延中.月球车移动1次的时间为100多秒,而月球和地球相对运动引起的差分相时延变化的周期约为24 h.由图2也可以看出,每次移动引起的差分相时延变化近似直线,故我们可对差分相时延进行1阶多项式拟合,利用拟合残差以及拟合残差的频谱来研究月球车在移动过程中的晃动情况.
图3(a)为月球车从A点到B点第1次移动时的差分相时延及拟合直线,图3(b)为拟合残差.图3(c)和(d)分别为月球车从A点到B点第2次移动时的差分相时延、拟合直线和拟合残差.4幅图均为BJ-KM基线数据,其余基线具有类似的情况.从图3(a)和(c)中可以看出,月球车从A点到B点的2次移动,第2次移动时的差分相时延比第1次的更加贴合拟合直线.从图3(b)和(d)中可以看出,第1次移动时比第2次移动时的晃动频率更高,幅度更大.

图3 月球车由A点移动到B点的差分相时延、拟合直线及拟合残差Fig.3 The di ff erential phase delay, fi tting lines,and fi tting residuals of the rover’s movement from point A to point B
图4(a)和(b)分别给出了月球车由A点到B点第1次移动时的BJ-UR和BJ-TM基线的差分相时延拟合残差的频谱.由图4(a)和(b)可以看出,在0.13 Hz附近存在相对幅值较大的谱线(频谱图中的低频成分比较突出,这主要是由于月球车实际行走路线不完全是直线造成的,不反映月球车实际晃动情况),表明月球车存在频率约为0.13 Hz的晃动.月球车晃动的原因可能是A点附近小石块较多所致,如图4(e)所示.图4(c)和(d)给出了月球车由A点到B点第2次移动时的差分相时延拟合残差的频谱.由图4(c)和(d)可以看出频谱谱线分布相对均匀,没有明显突出的频率成分.这说明月球车由A点到B点第2次移动过程中没有明显的周期性晃动,由图4(e)也可看出后半段月面地貌相对平整.
图5(a)和(b)分别给出了月球车由B点到C点第1次移动时的BJ-KM和BJ-UR基线的差分相时延拟合残差的频谱.由这两幅频谱图可以看出在0.14 Hz附近的频谱成分是相对突出的.图5(c)和(d)给出的是月球车由B点到C点第2次移动时的差分相时延拟合残差的频谱.这两幅频谱图中0.4 Hz附近的谱线幅值相对较高.月球车由B点到C点的这2次移动都存在不同频率的晃动.图5(e)给出了着陆器拍摄的月球车由B点到C点的移动路线月面地貌,可以看出这片区域中小石块、小撞击坑遍布,月面地形起伏较大.
图6(a)和(b)给出了月球车由C点到D点移动时的BJ-KM和BJ-UR基线的差分相时延拟合残差的频谱.从两幅频谱图中可以看出,两条基线差分相时延拟合残差频谱除了低频外,不存在其他突出的频谱成分.月球车在由C点移动到D点的过程中没有明显的周期性晃动,显示出C点到D点之间的月面地貌比较平整,如图6(c)所示.

图4 月球车由A点到B点移动时的差分相时延拟合残差的频谱以及着陆器拍摄的月球车移动路径照片Fig.4 The spectrum of the fi tting residuals of the di ff erential phase delay when the rover moved from point A to point B,and the photo of the rover moving path taken by the lander
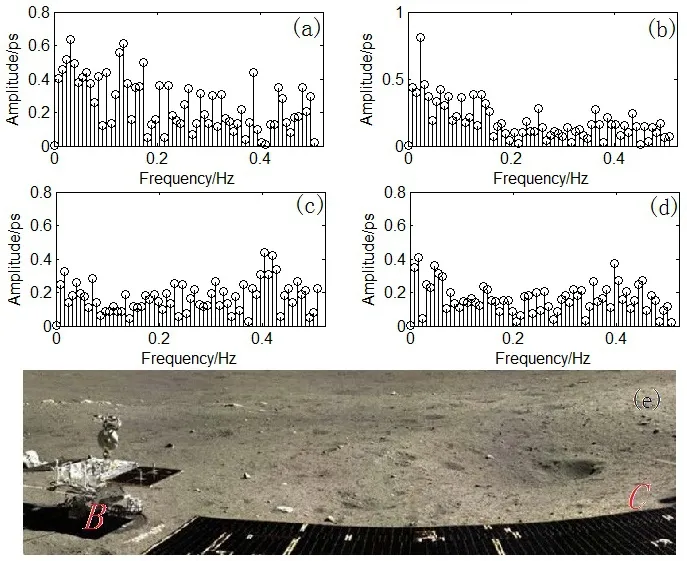
图5 月球车由B点到C点移动时的差分相时延拟合残差的频谱以及着陆器拍摄的月球车移动路径照片Fig.5 The spectrum of the fi tting residuals of the di ff erential phase delay when the rover moved from point B to point C,and the photo of the rover moving path taken by the lander
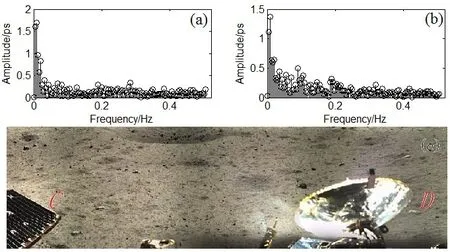
图6 月球车由C点到D点移动时的差分相时延拟合残差的频谱以及着陆器拍摄的月球车移动路径照片Fig.6 The spectrum of the fi tting residuals of the di ff erential phase delay when the rover moved from point C to point D,and the photo of the rover moving path taken by the lander
图7(a)和(b)给出了月球车由D点到E点第1次移动时的BJ-UR和KM-UR基线的差分相时延拟合残差的频谱.图7(c)和(d)给出了月球车由D点到E点第2次移动时的BJUR和KM-UR基线的差分相时延拟合残差的频谱.2次移动的频谱图中两条基线的谱线分布都比较均匀,不存在明显突出的频谱成分.由D点到E点,月球车移动过程中无明显周期性晃动.观察图7(e)可以看出,这片区域没有明显的裸露于月面地表的石块,月面相对平整.

图7 月球车由D点到E点移动时的差分相时延拟合残差的频谱以及着陆器拍摄的月球车移动路径照片Fig.7 The spectrum of the fi tting residuals of the di ff erential phase delay when the rover moved from point D to point E,and the photo of the rover moving path taken by the lander
23日月球车由E点移动到S1点,这次移动分3步完成.第2次和第3次移动的时间较短,采样点数太少,频谱分辨率低,不作分析.由E点到S1点第1次移动的差分相时延拟合残差的频谱中无明显突出的谱线,月球车没有明显的周期性抖动.根据前面的分析可以估计,这一段路线是比较平整的.
5 讨论
差分相时延的快速变化反映了着陆器和月球车上的两天线间的相对位置的变化.着陆器上的天线位置保持不变,而月球车上的天线会随月球车本身的移动或抖动发生相应的移动或抖动.当月球车两侧车轮同时通过月球坑或小石块,天线相位中心和车轮的位置变化幅度几乎相同,约为月球坑或小石块的尺寸;而当月球车仅有单侧车轮通过月球坑或小石块时,天线相位中心较该侧车轮的位置变化幅度会更大一些.月球车长度为150 cm,月球车前后车轮间间距约为75 cm.当月球车以平均速率5.6 cm/s行驶,单侧3个轮子依次越过一块小石块时,会引起3次震动,频率为(5.6 cm/s)/(75 cm)=0.075 Hz.当小石块、月球坑分布密集且间距小于车轮间距75 cm时,震动频率会增大(存在达到0.13 Hz、0.14 Hz和0.4 Hz的可能).14日月球车和着陆器分离时,有4次平移,平移距离分别为140 cm、10 cm、5 cm和5 cm,前面两次大的平移时,差分相时延有明显的变化,平移5 cm时,差分相时延反映不明显,如图8所示.这说明差分相时延监视月球车动作的灵敏度在5~10 cm之间[6],与本文利用(2)式估算的结果基本符合.月球车有6个直径30 cm、宽度15 cm的车轮,具备20◦爬坡,20 cm越障能力,可以翻越使差分相时延产生明显抖动的小石块或者坑.在嫦娥三号中,对差分相时延拟合后求得残差消除了大尺度月面高程变化的影响,拟合残差主要反映10 cm左右的月面地貌的凹凸变化,如小的月球坑或石块.拟合残差的频谱幅度越大,频率成分越多,则说明月面地貌凹凸变化较多、较大,月面越不平整.文献[9]给出了地形高程的相对变化曲线,仅从各点间曲线的小尺度变化分析可以看出,点N0102与点N0103之间曲线的前半部分明显比后半部分变化剧烈;点N0103和点N0104之间曲线的凹凸变化较为剧烈;点N0104、点N0105和点N0106之间的两段曲线凹凸变化的尺度较小,小于10 cm;点N0106和点N0107间的曲线过渡较为平滑,几乎无小尺度的凹凸变化.点N0102、N0103、N0104、N0105、N0106、N0107分别对应本文中点A、B、C、D、E、S1.上述结果与本文频谱分析得到的结果有一定的相似性.

图8 月球车14日4次平移差分相时延(KM-UR基线)Fig.8 The di ff erential phase delay when the rover moved 4 times on December 14(KM-UR baseline)
6 总结
本文基于差分相时延的高灵敏度,对月球车的移动动作进行了分析.通过分析差分相时延的变化,可以准确确定月球车移动动作的时间,进而得到月球车的移动速率,其平均值为0.056 m/s.差分相时延拟合残差反映的是月球车移动过程中的抖动,当拟合残差的频谱中存在比较突出的频谱成分,则说明月球车的抖动有周期性.分析结果表明,月球车由B点移动至C点时,抖动较大,对应的月面地形起伏也较大.
[1]刘庆会,陈明,熊蔚明,等.中国科学G辑,2010,40:253
[2]Liu Q H,Kikuchi F,Tsuruta S,et al.ITAP,2007,55:1466
[3]Liu Q H,Kikuchi F.AdSpR,2007,40:51
[4]Liu Q H,Kikuchi F,Goossens S,et al.JGSJ,2009,55:243
[5]Chen M,Liu Q H.SCSMP,2011,54:2284
[6]郑鑫,刘庆会,吴亚军,等.中国科学G辑,2014,44:872
[7]Liu Q H,Zheng X,Huang Y,et al.RaSc,2014,49:1080
[8]黄勇,昌胜骐,李培佳,等.科学通报,2014,59:2268
[9]Liu Z Q,Di K C,Peng M,et al.SCSMP,2015,58:1
Speed Measurement and Motion Analysis of Chang’E-3 Rover Based on Di ff erential Phase Delay
PAN Chao1,2LIU Qing-hui1ZHENG Xin1,2HE Qing-bao1,2WU Ya-jun1,2
(1 Shanghai Astronomical Observatory,Chinese Academy of Sciences,Shanghai 200030) (2 University of Chinese Academy of Sciences,Beijing 100049)
On 2013 December 14,the Chang’E-3 made a successful soft landing on the lunar surface,and then carried out the tasks of separating the lander and the rover, and taking the photos of each other.With the same beam VLBI(Very long baseline interferometry)technique to observe the signals transmitted by the lander and the rover simultaneously,the di ff erential phase delay between them is calculated,which can re fl ect a minor change of the rover’s position on a scale of a few centimeters.Based on the high sensitivity of di ff erential phase delay,the rover’s speeds during 5 movements are obtained with an average of 0.056 m/s.The relationship between the rover’s shake in moving process,and lunar terrain is analyzed by using the spectrum of the residual of the di ff erential phase delay after the fi rst-order polynomial fi tting.
Moon,techniques:interferometric,techniques:miscellaneous,methods: analytical,methods:miscellaneous
P164;
:A
2014-12-22收到原稿,2015-02-04收到修改稿
∗国 家 自 然科 学 基 金 项 目(11273049,11473059)、 上 海 市 导 航 和 定 位重 点 实 验室(3912DZ22733001)资助
†panchao@shao.ac.cn
‡liuqinghui@shao.ac.cn
10.15940/j.cnki.0001-5245.2015.04.005
