基于模糊免疫PID的轧机液压位置自动控制
2015-06-26樊立萍马怀通刘义
樊立萍,马怀通,2,刘义
(1.沈阳化工大学环境与安全工程学院,辽宁沈阳110142;2.沈阳化工大学信息工程学院,辽宁沈阳110142;3.北方重工集团压延设备分公司,辽宁沈阳110141)
1 引言
镁合金是迄今在工程中应用最轻的金属结构材料,在国防、航空航天、高速列车、汽车和电子通信等领域已大量应用,被誉为21世纪最富于开发应用潜力的“绿色工程金属结构材料”。随着各行各业对镁合金薄板需求量的不断增长,对镁合金薄板轧制技术提出了更高要求,提高轧机装备整体操作精度成为必需。
板厚精度作为板带材最主要的质量指标之一,其控制水平在很大程度上决定了板带材的质量。液压自动位置控制(APC)系统是板厚自动控制系统的基础和核心,其作用就是精确地控制压下位移以得到所需的辊缝,是整个厚度控制系统的执行终端。因此,APC系统能否正常稳定地工作,决定着板厚控制系统能否顺利投入[1]。
由于液压APC 控制系统具有非线性、参数时变性等特性,常规PID 控制手段较难获得满意的控制效果。对此,一些学者也提出了一些改进的控制方法,如模糊自整定方法调整PID控制器参数,采用神经网络方法对系统进行控制等[2-3]。
模糊控制具有可以较好地处理各种不确定性、时变性和非线性系统等优势。但模糊控制对专家经验具有过分依赖性,模糊控制器的控制效果往往取决于设计者的经验程度。人工免疫系统在大量干扰和不确定的环境中具有很强的鲁棒性和自适应性等特点,已发展成为计算智能领域研究的一个重要的分支[4-5]。本文针对镁板轧机液压APC 系统,设计一种模糊免疫PID 控制器。
2 液压APC控制系统模型
构成液压APC系统的主要元件,包括电液伺服阀、液压缸、轧机辊系、位移传感器,其控制原理如图1所示。

图1 轧机APC控制原理图Fig.1 Control scheme of rolling APC
2.1 伺服放大器
伺服放大器的频宽比电液伺服阀的频宽高得多,响应速度很快,可不计时间常数,近似为比例放大环节,表示为

式中:I 为伺服放大器输出电流,A;Ka为伺服放大器的增益;Ur为给定电压信号,V;Uf为位移传感器输出的位移反馈信号,V。
2.2 电液伺服阀
电液伺服阀的响应特性由系统的频宽来决定。当液压执行机构的固有频率ωh低于50 Hz 时,伺服阀的动态特性一般可用一阶环节表示:
当液压执行机构的固有频率高于50 Hz 时,可用二阶环节表示,即
式中:Gsv为Ksv=1时的伺服阀传递函数;Qv为伺服阀流量,m3/s;Ksv为伺服阀增益系数,m3/(s·A);ωsv为伺服阀的固有频率,rad/s;ξsv为伺服阀的阻尼系数。
2.3 液压缸
利用液压控制阀的流量方程、液压缸流量连续性方程、液压缸和负载的力平衡方程,采用质量、弹簧和阻尼结构的系统,可导出液压缸的传递函数为
其中
式中:ωr为惯性环节的转折频率;ξh为液压阻尼比;Kce为总流量压力系数,m3/(s·Pa);K为弹性负载的综合刚度,N/m;Ah为液压缸的有效面积,m2;ωh为液压固有频率。
2.4 位移传感器
位移传感器在系统中可视为惯性环节,即
式中:Xp为液压缸输出位移;Kf为位移传感器的位移电压转换系数;Tf为位移传感器的时间常数,s。
考虑到位移传感器的固有频率远高于液压系统的固有频率,可得到位移传感器的简化模型

2.5 液压APC系统
考虑到伺服阀的频率远高于液压系统频率,因此可以把伺服阀当成一个比例环节,即

液压APC的闭环控制系统简化方框图如图2所示。将活塞负载压力设为零,且忽略弹性负载,即K=0,可得液压APC系统的开环传递函数:

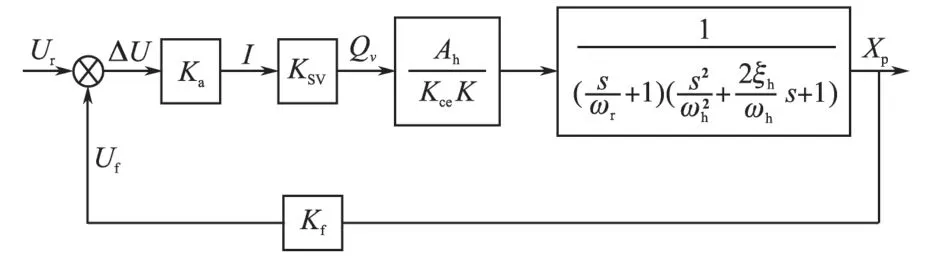
图2 液压APC系统方框图Fig.2 Diagram of hydraulic APC system
某轧机的主要参数为:Ka=0.001 A/V,Ksv=0.067 7 m3/(s·A),Kf=3.261 6×103V/m,Ah=3.24×10-2m2,ωh=2.720 8×103rad/s,ξh=0.1。
将参数数据带入式(7)可得:

3 模糊免疫PID控制器设计
考虑到液压APC系统的非线性与时变性,常规控制算法一般难以确保压下位移的精确性。因此,本文采用模糊免疫PID 控制算法实现对压下位移的精确控制。模糊免疫PID控制器实际是模糊控制器与免疫PID 的结合,而免疫PID 是将常规PID控制与生物免疫原理相结合。图3为其结构框图。
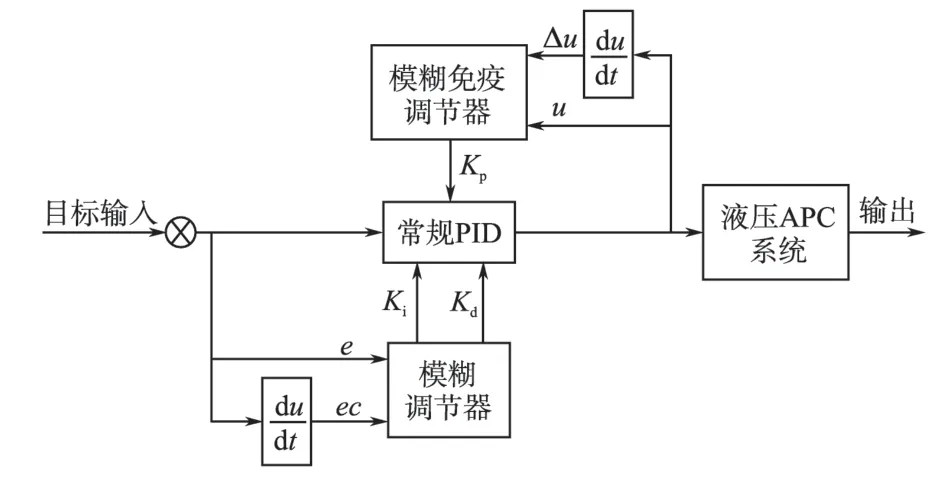
图3 模糊免疫PID原理图Fig.3 Simplified schematic of fuzzy immune PID
3.1 生物免疫机理
免疫是生物体的一种特性的生理反应。生物的免疫系统对于来自外界的有害抗原可产生相应的抗体来抵御,抗体与抗原经过一系列的反应,通过吞噬作用或产生特殊酶的作用来毁坏抗原。生物的免疫系统由淋巴细胞和抗体分子组成,淋巴细胞又由胸腺产生的T 细胞和骨髓产生的B 细胞组成,T 细胞可分为辅助细胞Th和抑制细胞Ts。当抗原侵入机体并经周围细胞消化后,将信息传递给T 细胞,然后刺激B 细胞。B 细胞产生抗体以消除抗原。当抗原较多时,机体内的细胞Th也较多,而Ts细胞却较少,从而产生较多的B 细胞。随着抗原的减少,体内Ts细胞又会增多,从而抑制Th细胞的产生,则B细胞随着减少。经过一段时间间隔后,免疫反馈系统趋于平衡。免疫系统的抑制机理和主反馈机理之间的相互协作是通过免疫反馈机理对抗原的快速反应和稳定免疫系统完成的[6-8]。
3.2 免疫PID控制
常规PID控制器的增量输出为
式中:Kp,Ki,Kd分别为比例、积分和微分系数。
免疫系统虽然十分复杂,但是抵御抗原的自适应能力却十分明显。对于非线性的APC系统,采用PID控制时,为了达到好的控制效果,可以采用免疫原理来实现PID参数的调整。免疫PID控制是借鉴生物系统的免疫机理设计出的一种非线性控制器,根据生物的免疫反馈原理,假设第k代抗原数量是ε(k),抗原刺激的Th细胞的输出是Th(k),Ts细胞对B细胞的影响为Ts(k),则B细胞接受的总刺激为

其中Th(k)=k1ε(k)Ts(k)=k2f[S(k),ΔS(k)]
财务模型还需要计算几个主要的财务指标,用以反映项目的经济可行性。主要包括偿债覆盖率DSCR,即每年或半年项目现金流与需偿还债务的比例。贷款期偿债覆盖率LLCR,即考察在整个贷款还款期间项目收入现金流对还债的支持强度。还有股本金内部收益率IRR,用以反映投入股本的收益情况。股权债权比D/E,用以反映项目中实际投入的股本金和银行贷款部分金额的比例情况。
若以液压APC 系统的位移偏差e(k)对应免疫系统的ε(k),控制器的输出u(k)对应免疫系统B细胞接受的总刺激S(k),则反馈控制规律可设计如下:

其中kp1=k1{1-ηf[u(k),Δu(k)]}
式中:k1为控制响应速度;η为控制稳定效果,η=k2/k1;f(·)为选定的非线性函数,表示抑制细胞的抑制量。
由于常规比例控制器的算法可表示为

式中:Kp为比例增益。
比较式(13)和式(14)可知,基于反馈机理的控制器是一个非线性的比例控制器,其比例增益为

3.3 模糊免疫PID控制
模糊控制由于具有不依赖于被控对象的精确模型和较强的鲁棒性等优点,可以很好地解决非线性对象控制问题,被广泛地应用于各种控制系统。
本文依据模糊控制逻辑可以逼近任意非线性函数的特点,采用了两个二维模糊控制器来实现对被控对象的控制,一个模糊控制器用来实现免疫反馈规律中的非线性函数f(·),另一个模糊控制器来实现Ki和Kd的自调整。
免疫模糊控制器采用两输入单输出,在图3中,两输入变量为PID控制器的输出u(k)和输出变化量Δu(k),输出变量是f(·),输入变量u(k)与输出变量f(·)被3个模糊集模糊化,分别是“正大”(PN)、“零”(Z)和“负大”(NB);输入变量Δu(k)被2 个模糊集模糊化,分别是“正大”(PB)、“负大”(NB)。u(k),Δu(k)和f(·)的隶属函数分别如图4所示。
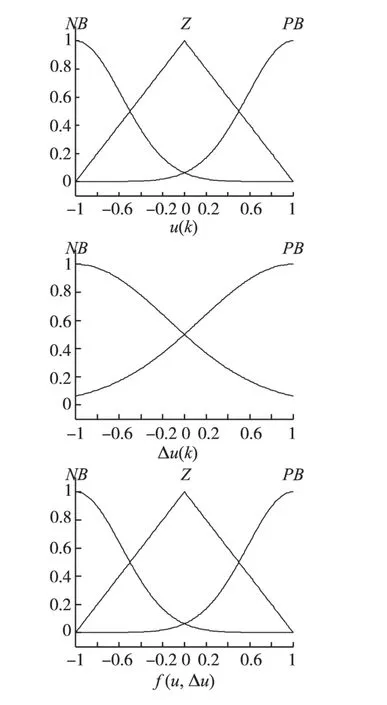
图4 模糊变量的隶属函数Fig.4 Membership function of u(k),Δu(k)和f(·)
细胞接受的刺激越大,则抑制能力越小;细胞接受的刺激越小,则抑制能力越大。根据此原则,制定出如表1所示模糊规则。
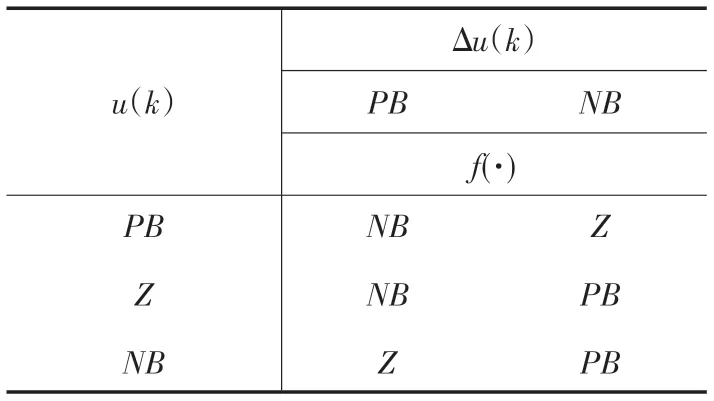
表1 f(·)的模糊控制规则表Tab.1 Fuzzy control rules of f(·)
用于调节PID参数Ki和Kd的模糊控制器采用两输入两输出。以液压APC 系统位移误差e(k)及其变化率△e(k)作为两输入,以Ki和Kd作为两个输出,每个量的模糊集被7个模糊集模糊化,定为:{NB,NM,NS,ZO,PS,PM,PB},隶属函数采用三角形,由液压压力调节实际经验以及PID 参数整定规则,得到Ki和Kd的模糊控制规则如表2、表3所示。

表2 Ki模糊控制规则表Tab.2 Fuzzy control rules of Ki
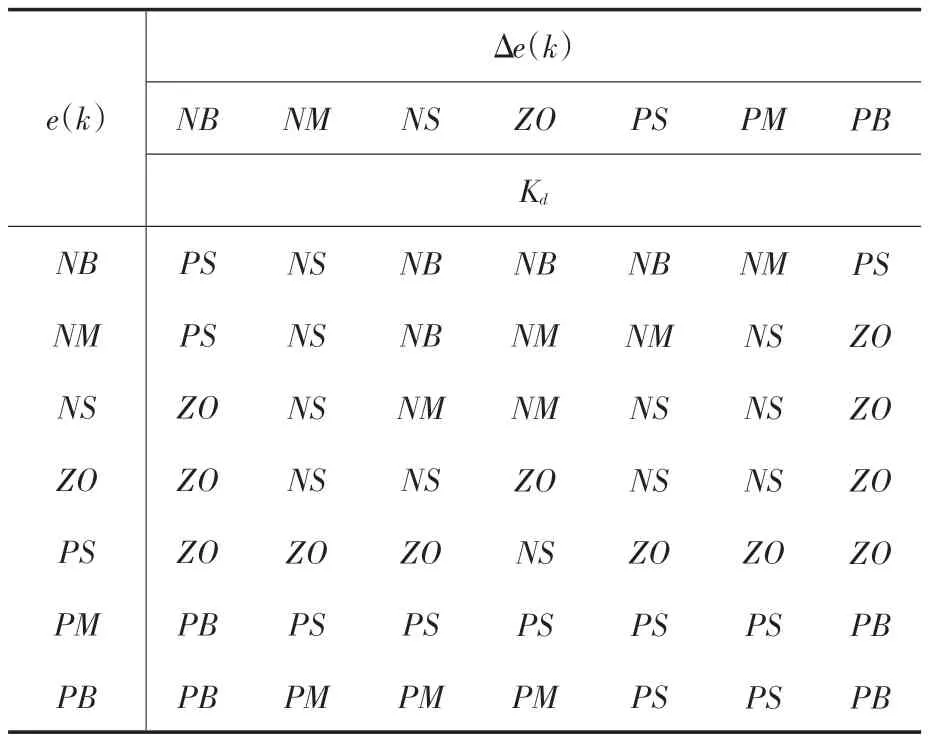
表3 Kd模糊控制规则表Tab.3 Fuzzy control rules of Kd
在以上各控制规则中,均使用Mamdani模糊推理机制,采用Centroid 去模糊化方法得到模糊控制器输出。
4 仿真实验研究
根据前面所建立的液压APC 系统的数学模型,在Matlab/Simulink 仿真环境下,分别对传统PID、模糊自适应PID和模糊免疫自适应PID进行仿真对比研究。
传统PID 控制器的参数根据Ziegler-Nichols方法[9-12]整定得到,分别为:Kp=50,Ki=43 290,Kd=0.014 43。模糊自适应PID 控制器与模糊免疫PID 控制器的参数采用离线试探的方法确定,分别为:Kp=50,Ki=0,Kd=0.01,η=0.13,k1=5.5。位移信号的阶跃响应曲线如图5所示。
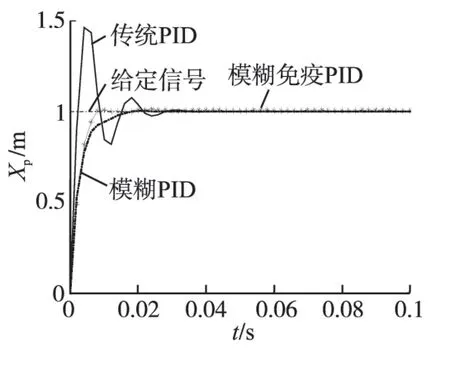
图5 位移阶跃响应曲线Fig.5 Step response curves of position
由图5 可以看出,传统PID 虽然响应时间较快,但是超调量比较大,而且稳定时间较长。模糊自适应PID 与模糊免疫PID 的响应速度都较好,且没有超调量,但是模糊免疫PID上升时间更短,稳定性更好。
为检验所设计控制方案的跟随性,对给定位移信号在某个时刻发生变化的情况下系统的响应进行了仿真。图6 为将液压APC 系统的输入给定值由1 突然改变为1.15 时系统的响应曲线。从图6 中可以看出,传统PID 与模糊自适应PID虽然都可以使系统响应最终达到新的稳态,但在发生给定变化时都有较大幅度的振荡产生,且需要经过较长时间才趋于稳定。模糊免疫自适应PID 能够以更快的速度跟随新的给定值,且不需要经过振荡调整,具有更好的控制效果。
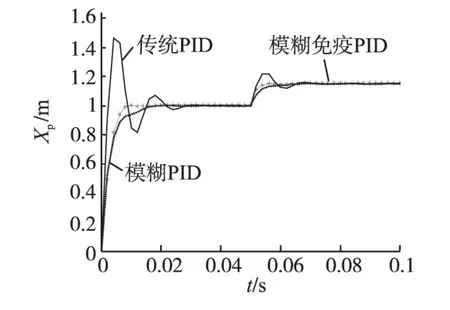
图6 改变给定值后的响应曲线Fig.6 Response curves of position with input change
5 结论
在轧机液压APC 系统数学模型基础上,结合传统PID 控制优势及模糊控制和生物免疫调节规律,设计基于模糊免疫PID 的轧机液压位置控制系统,能够解决液压APC 系统的非线性、时变性等特性对轧辊位移精确控制的影响。该控制方法具有响应速度快、超调量小、抗干扰能力强等优点,且精度高、简单、易于实现,对解决液压APC 系统控制问题具有一定的参考价值。
[1]张瑞成,童朝南.轧机主传动系统自抗扰控制器设计与应用[J].控制理论与应用,2005,22(6):1005-1009.
[2]曹智文,马红梅.模糊自整定PID控制器在冷轧带钢板厚自动控制中的应用[J].华北科技学院学报,2008,5(1):73-75.
[3]杨景明,刘宇明,徐雅洁,等.神经网络自适应控制在冷轧机AGC系统中的应用[J].冶金设备,2009,4(2):14-18.
[4]Peng Y,Luo X,Wei W.A New Control Method Based on Artificial Immune Adaptive Strategy[J].Elektronika ir Elektrotechnika,2013,19(4):3-8.
[5]谢克明,谢刚,郭红波,等.人工免疫系统及其算法[J].电子与信息学报,2005,27(11):1839-1844.
[6]张小鸣,龙仕玉.基于DSP 直流电机模糊免疫PID 控制器研究[J].电气传动,2013,43(2):65-68.
[7]Euntai K.A New Approach to Numerical Stability Analysis of Fuzzy Control Systems[J].IEEE Trans.on Systems,2001,31(1):107-113.
[8]陈然,陈沛富,孙冬野,等.双离合器自动变速车辆换挡模糊免疫PID控制[J].控制工程,2010,17(6):764-768.
[9]Lelin V,Balasubbareddy M,Madhu T.Ziegler-nichols PID Controller for Effective Pay-load Torque Responses and Tipvibrations of Double Link Manipulator[J].International Journal of Research in Engineering and Technology,2013,2(10):421-426.
[10]Lin J,Chang P.Intelligent Ziegler-nichols-based Fuzzy Controller Design for Mobile.Satellite Antenna Tracking System with Parameter Variations Effect[J].WSEAS Transactions on Circuits and Systems,2012,11(7):224-236.
[11]Bolat E.Implementation of Matlab-simulink Based Real Time Temperature Control for Set Point Changes[J].International Journal of Circuits,Systems and Signal Processing,2007,1(1):54-61.
[12]Vaishnav S,Khan Z.Performance of Tuned PID Controller and a New Hybrid Fuzzy PD+I Controller[J].World Journal of Modelling and Simulation,2010,6(2):141-149.