级联H桥型高压变频器中脉冲编解码技术研究
2015-06-26谢战洪李海霞王笑非高瑛
谢战洪,李海霞,王笑非,高瑛
(1.中国船舶重工集团公司第七一三研究所,河南郑州450015;2.黄河科技学院信息工程学院,河南郑州450062)
1 引言
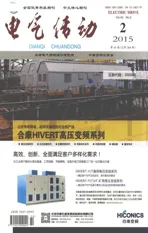
在机车牵引、矿井提升等场合,都需要使用高压变频器对电机进行变频调速控制,以实现电机的高性能运行;在一些需要电机调速运行的场合,通过使用变频器控制电机转速,还可以起到显著的节能作用[1-4]。目前在6 kV 以上的场合,基于级联H 桥结构的变频器与其他类型的多电平技术方案相比,具有众多优势,因此在市场上占有绝对份额。级联H 桥逆变器的基本思想是将多个变换器单元进行级联,从而输出高压[5-8]。各H桥单元的电容电压可以由独立电源供电,也可以采用一定的算法动态维持。典型的级联H桥型变频器的拓扑结构如图1所示。

图1给出了典型级联H桥型逆变器的拓扑结构,其中输入侧电网电压为6 kV/10 kV,经过多绕组移相变压器后,产生多组彼此电气隔离的三相输出电压,各绕组电压经过二极管不控整流后产生直流电,再经过各H桥逆变后产生交流电。级联H桥型变频器具有如下特点[9-11]。
1)扩展性好。通过增加变压器绕组个数和级联的H 桥单元个数,可以进一步提高电压等级,满足不同功率场合的需求,易于扩展到更大容量中使用,因此具有较好的扩展性。
2)高度模块化。系统主要由移相变压器和各H桥单元构成(一般将三相整流桥与H桥一起集成于一个单元中),因此系统模块化程度高,易于生产和维护,并具有较好的通用性。
3)容错性好。由于系统中各H 桥单元进行级联输出高压,当某个H 桥单元发生故障时,可以旁路该H 桥单元,实现系统的变结构降额运行,提高系统的可靠性和容错性。
4)电容电压易于维持。与其他多电平变换器拓扑相比,级联H 桥型逆变器中,各H 桥单元的电容仅起滤波作用,因此电容电压易于维持,有利于提高系统可靠性。
对于级联H 桥逆变器的调制算法和控制策略等内容已经有很多文献介绍了[12-15]。文献[12]分析了级联H 桥型变频器中的驱动脉冲产生方法,通过推导其脉冲模型,给出了不同优化目标下的优化算法;文献[13]通过将级联H桥型变频器中的不控整流桥换为PWM 整流器,使系统具备了4象限运行能力;文献[14]则采用单相PWM整流器,进一步降低了系统成本;文献[15]讨论了基于级联H桥型变频器的电力系统储能系统,充分验证了级联H 桥型变频器的可行性和良好的扩容能力。但在级联H桥型变频器中,有多个开关器件需要控制,以5级级联的系统而言,系统中共有60 个脉冲信号,当考虑旁路开关、故障状态等通信需求时,所需要的通信量更加巨大。因此需要制定高效、合理、可靠的脉冲传输方案,而目前国内外对该问题的研究成果还鲜有报道。
本文以一套6 kV,5 级级联的H 桥型变频器为例,分析了其中的信号传输需求,研究了其脉冲产生机理,并对其中的脉冲编解码技术进行了阐述,制定了相关的信号协议,并设计了编解码流程和具体硬件电路。对于级联H 桥型高压变频器的开发和应用有较好的参考价值。
2 拓扑结构
级联H桥型变频器的拓扑结构如图2所示,其中输入侧为高压工频6 kV/10 kV交流电,经过移相变压器后得到多个隔离的三相交流电,再经过各自的三相不控整流电路后得到多个独立的直流源,各直流电压基本相同,近似用Udc表示。图2中的系统拓扑图总体包括主电路和控制电路两大类。其中主回路包括激磁涌流柜、多绕组变压器、功率单元(内部包含整流器、逆变器),主要完成功率部分的转换和输出;控制回路包括速度/电压/电流检测、运算电路、PWM 生成及驱动、保护电路等,主要完成整个变频器的闭环控制、实时状态检测和保护。变频器可以拖动三相6 kV/10 kV的同步/异步电机,实现对电机多种模式的控制。
图2 中主电路的内部结构如图1 所示,主要由二极管整流器和多个由IGBT 构成H 桥组成。控制电路独立于主电路,控制电路通过光纤将驱动信号送入各个H桥单元中,从而实现对每个单元中IGBT的控制。控制电路与主电路的连接关系如图3所示。
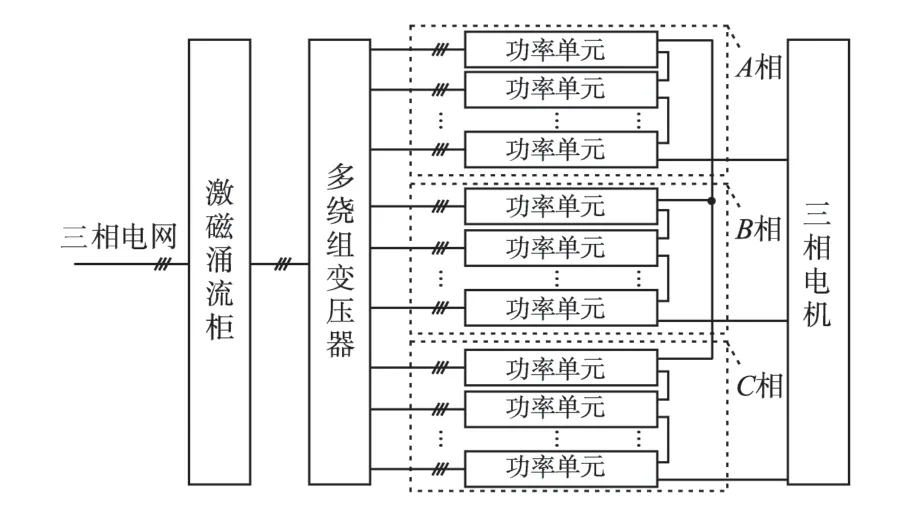
图2 级联H桥型高压变频器连接图Fig.2 Connections of cascaded H-bridge converter
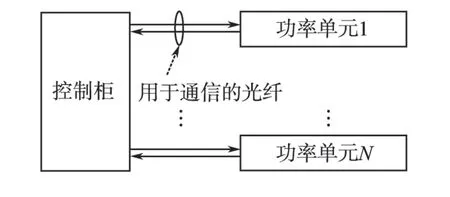
图3 控制电路与主电路的总连接图Fig.3 Connections between control circuits and power circuits
图3中,控制电路安放于控制柜中,控制柜发出的指令信号通过光纤传入各功率单元中,各功率单元根据得到的指令信号控制内部各开关器件动作,从而实现相应的电压输出,达到控制电机运动的目的。功率单元的信息通过光纤信号回传入控制柜中,这些信息包括温度信号,故障信号等。控制柜据此监控系统各模块的状态,在出现故障等情况时对故障信号进行封锁和完成系统报警等功能。
3 PWM脉冲的产生算法
以级联H 桥型变频器中的任意一相输出电压作为研究对象,其取值为该相中各H桥的输出电压之和。现以A 相第1 级H 桥单元(见图4)的输出电压为研究对象,左、右2个桥臂的输出电压分别为uL(t)和uH(t),左右桥臂的2 个开关状态互补,开关周期为Ts,以该H桥单元中直流母线电容负极为参考点。用x 表示开关脉冲在1 个Ts内的脉冲宽度,用xL和xR分别表示左右桥臂的脉冲宽度,其取值范围为0到2π。
图4 H桥单元拓扑结构Fig.4 Structure of one H-bridge
以直流母线负端为参考点,则左桥臂的输出uL(t)在以区间[2kπ-π,2kπ+π]时(其中k为整数)可以表示为
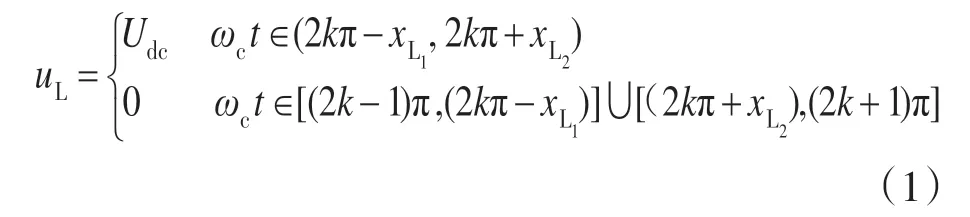
其中,xL1和xL2分别表示xL位于竖轴2kπ左右两侧的脉冲宽度,采用对称三角波调制,载波频率为ωc,因此有xL1=xL2=xL/2。
将uL(t)进行周期性拓展,则在区间[2kπ-π,2kπ+π]内时,uL(t)可展开为

其中

式(1)中对于不同的k,xL取值可相同;但是无论k取何值,uL(t)均可表示为式(2)和式(3)的形式,由此可得

上式中,xL时变。同理,右桥臂的输出可以表示为

于是整个H桥的输出uH可表示为

从式(6)可以看出,当左右桥臂的脉冲宽度之和为2π时,可以消去开关频率奇数倍的谐波,且其余开关频率整数倍的谐波相位是载波的函数。
假设此时左右两桥臂的参考电压分别为uref-L(t)和uref-R(t),则可得两桥臂的脉冲宽度分别如下式:

由式(6)可知,当式(7)、式(8)之和为2π时,可以消去开关频率奇数倍的谐波。因此可得左右桥臂参考电压的关系为

对于级联个数为N 的系统,当各级H 桥的驱动脉冲依次相差π/N 时,可以将等效开关频率提高为原来的2N倍,因此在得出第1级驱动脉冲的情况下,只需要将脉冲依次向后移动Ts/(2N)作为其余各级的驱动脉冲即可。
在实际系统中,PWM 脉冲的产生和相位移动,由相应的PWM生成模块实现,如图5所示。
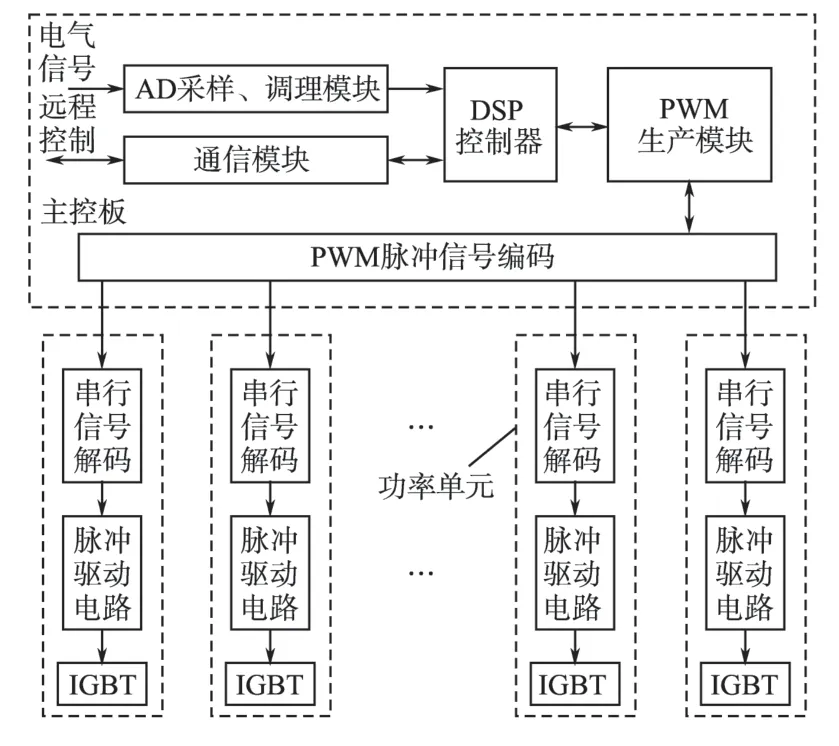
图5 级联H桥型逆变器脉冲产生及传输Fig.5 Methods for generating and transmitting the pulses
实际系统中,采用可编程逻辑器件实现PWM的生成,实现类似于DSP中的PWM模块功能,开关频率选择2 kHz。系统中使用的晶振为40 MHz,维持一个锯齿波计数器实现2 kHz的中断,其计数最大值Tprd为

计数器最大值的一半为

系统运行时,DSP 通过向PWM 生成模块中写入一个数值cmpr(0≤cmpr≤Thalf-prd)来改变输出的PWM 脉冲波形,通过计数器与cmpr 的比较关系,确定脉冲波形,如图6所示。
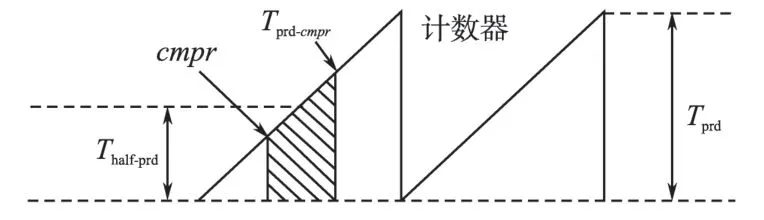
图6 生成PWM的原理图Fig.6 Diagram of generating PWM
由图6 所示,当需要改变PWM 信号时,只需要改变cmpr,且cmpr取0~Thalf-prd时,对应的脉冲宽度为0~2π。整个产生PWM的过程仅需要使用参数cmpr,DSP在每个开关周期内向模块写入相应的cmpr即可。
4 PWM脉冲的编码
基于图6 所示的PWM 生成方法产生一个H桥单元的驱动脉冲,采用可编程逻辑器件进行脉冲延迟后,即可以得到各H桥单元的脉冲。设计如图7 所示的脉冲编码协议,对各H 桥单元的驱动脉冲和控制信号进行编码控制。

图7 串行PWM编码协议Fig.7 Protocol of serial PWM encoding
图7 中,完整的一帧数据总共用时10 个Tbit,其中包括1个开始位,1个分隔位,4个数据位和4个停止位。开始位用来标示一帧数据的开始,当系统处于停止状态时,如果检测到信号跳变为0则进入接受状态。4个数据位用来标识左桥臂上管开关状态、右桥臂开关状态、封锁状态、备用信息。分隔位用来将4 个数据位分隔为两组,避免4 个数据位均为高被误判为停止位。使用4个停止位,使系统进入等待数据状态,确保系统可靠进行状态跳转,避免数据接收和解码错误。

由此可得传送帧数据的频率为400 kHz,对于2 kHz 的PWM 信号,带来的PWM 脉冲误差将不超过2/400=0.5%,可以满足系统要求。
5 PWM脉冲的解码
图7中给出了PWM脉冲的编码协议,通过编码可以将PWM信号以及相关的控制信号转化为一条光纤信号进行传输。该光纤信号传送到各H桥单元后,单元内部的解码电路对光纤信号进行处理,由此得到PWM脉冲信号和控制信号。
对PWM 信号的解码使用状态机完成,状态机的流程图如图8所示,计数器m1和m2用来辅助对状态机进行控制,其中m1用以完成信号封锁,m2用来控制接收数据过程。
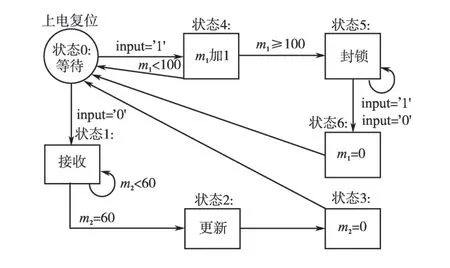
图8 串行PWM信号解码流程Fig.8 Diagram of decoding the serial PWM signal
串行信号的解码流程为一个典型的有限状态机,主要有6种状态,其状态跳转框图如图8所示。其中input为输入的串行PWM信号,计数器m1用来记录input 持续为高的时间,m2用来控制接收数据的持续时间。
图8各状态的功能和跳转流程如下:1)状态0为等待,如果input为高则进入状态4,如果input为低则进入状态1;2)状态1为接收,由于每帧数据占100个时钟周期,而其中数据存在于前60个时钟周期中,因此读取连续60 个时钟周期的input 数据,该过程由计数器m2控制。当读取完毕后,跳转为状态2;3)状态2为更新,根据接收到的60个时钟周期数据,解析出每个器件的开关状态并进行更新。执行完毕后进入状态3;4)状态3将m2置0后返回状态0,从而开始接受下一帧数据;5)状态4中,将m1加1,若m1小于100则返回状态0,否则进入状态5;6)状态5 为封锁,所有开关器件均被封锁,直到input 为低时,进入状态6;7)状态6 将m1置0 后返回状态0;8)状态机运行过程中,若一直检测到连续100个高电平,则系统将会进入状态5封锁所有PWM脉冲,确保实验系统安全。
根据图8 所示的PWM 脉冲解码流程,可以获得左右桥臂上管的驱动脉冲,利用可编程逻辑器件加入死区后,即可作为驱动脉冲控制各IGBT 动作,实现了PWM 脉冲信号的还原。
6 实验验证
基于本文提出的脉冲编解码算法,采用ALTERA公司生产的CPLD芯片,完成了PWM信号的生成、编码和解码工作。6 kV/600 kW的系统采用5 级级联,每个H 桥单元中直流电容电压为1 000 V,采用1 700 V/300 A的IGBT作为功率开关器件。主控DSP选择TI公司的F28335,DSP通过数据线将数据写入CPLD,实现对系统的控制。
图9 给出了运行过程中的串行编码信号波形,为便于分析和描述,图9中标出了一帧通信数据的开始位置和结束位置,可以看出在开始位置后连续250 ns 时间内,信号为低,此时信号即为开始信号;之后2个250 ns为数据位3和2;之后1个250 ns 为间隔位,其电平为低电平;之后2 个250 ns为数据位1和0;之后4个250 ns为停止位,其电平为高。对比图9 和图7 可知,实验结果与理论设计协议吻合。
图10所示为第1级H桥单元输出的电压波形,其波形中有3种电平,分别为-1 000 V,0,+1 000 V,系统此时的输出频率为50 Hz,基波为正弦。
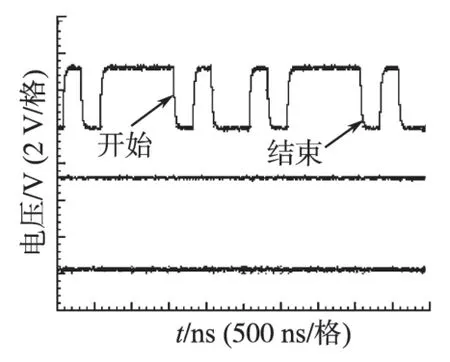
图9 串行编码实验波形Fig.9 Waveforms of encoded signal

图10 第1级输出电压波形Fig.10 Output of the first H-bridge
图11为此时第1级输出的电压波形的谐波分析。可以看出,虽然IGBT 的开关频率为2 kHz,但是每级H桥的输出电压中,最低次开关频率整数倍的谐波集中在4 kHz附近,这与式(6)的分析结果相吻合,表明按照式(9)给出的参考电压选取方法,可以提高各级H桥单元输出电压的等效开关频率,且达到了优化输出电压谐波特性的目的。
图12 给出了系统5 级级联情况下的输出电压波形。可以看出级联后的输出电压波形最多达11种电平,且波形正弦度高,为进行电机控制、有源滤波等应用提供了条件。图12 还给出了系统接电机空载运行时的电流波形,可以看出电流波形正弦度较高,频率与电压频率相同,表明高压变频器系统工作正常。
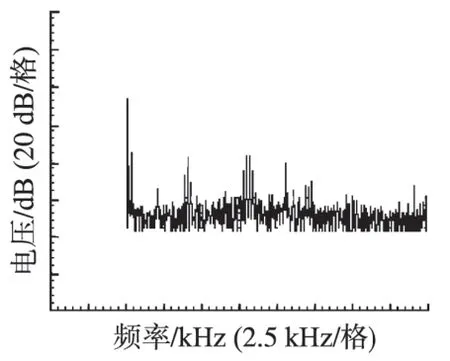
图11 第1 级H 桥输出电压的频谱分析Fig.11 Analysis of the harmonic spectrum
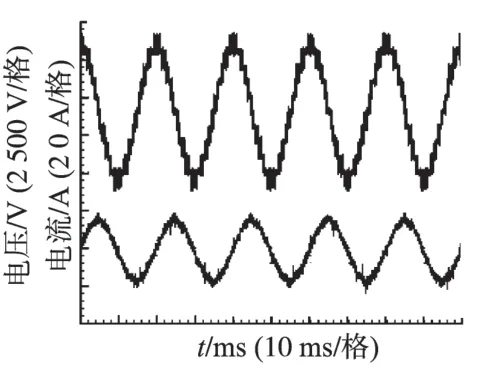
Fig.12 变频器输出的电压和电流Fig.12 Output voltage and current of converter
7 结论
随着工业的不断发展和对大容量传动需求不断增加,级联H桥型高压变频器得到了越来越广泛的应用,如何提高变频器的可靠性,降低系统成本,并增强系统的抗干扰性、容错性等指标成为一个重要的研究课题。本文针对级联H桥型高压变频器中的脉冲编解码技术进行讨论,给出了系统的主电路和控制电路连接模型,通过分析脉冲的作用过程,对H桥的输出电压进行了定量分析,并由此提出了相关的采用可编程逻辑器件生成PWM脉冲的算法。针对多路PWM脉冲信号提出了相关的编解码算法,指定了相关的通信协议。实验结果表明,本文提出的脉冲编解码算法正确可靠,将其用于实验样机中,达到了预期效果,对于实际系统的开发和应用有较好的参考价值。
[1]张立伟,黄先进,游小杰,等.欧洲主力交流传动机车主牵引系统介绍[J].电工技术学报,2007,22(7):186-190.
[2]李崇坚.大功率交流调速系统在钢铁工业中的应用[J].电气时代,2007,1(7):52-55.
[3]费万民,姚文熙,吕征宇,等.中高压变频调速技术综述[J].电力电子技术,2002,36(2):74-78.
[4]Tolbert L M,Peng Fangzheng,Cunnyngham T,et al.Charge Balance Control Schemes for Multilevel Converter in Hybrid Electric Vehicles[J].Industrial Electronics,IEEE Transactions on,2002,49(5):1058-1064.
[5]林渭勋.现代电力电子技术[M].北京:机械工业出版社,2006.
[6]竺伟,陈伯时,周鹤良,等.单元串联式多电平高压变频器的起源、现状和展望[J].电气传动,2006,36(6):3-7.
[7]彭方正,钱照明,罗吉盖斯,等.现代多电平逆变器拓扑[J].变流技术与电力牵引,2006,(5):6-11.
[8]Chen Yonggang,Wang Ping,Li Yaohua,et al.A Novel Hybrid Modulation Method for Cascaded H-bridge Active Power Filter[C]// Power Electronics and Motion Control Conference,2008:1981-1986.
[9]Bingsen W,Venkataramanan G,Illindala M.Operation and Control of a Dynamic Voltage Restorer Using Transformer Coupled H-bridge Converters[J].IEEE Transactions on Power Electronics,2006,21(4):1053-1061.
[10]Fukuda S,Yoshida T,Ueda S.Control Strategies of a Hybrid Multilevel Converter for Expanding Adjustable Output Voltage Range[J].Industry Applications,IEEE Transactions on,2009,45(2):827-835.
[11]张先进,龚春英.级联型逆变器单元故障控制方法[J].电气自动化,2008,30(3):21-22.
[12]高志刚,李永东.级联H桥型变流器的调制方法建模与优化策略[J].电力自动化设备,2010,30(10):12-16.
[13]吴凤江,赵克,孙力,等.一种新型四象限级联型多电平逆变器拓扑[J].电工技术学报,2008,23(4):81-86.
[14]Lezana P,Rodriguez J,Oyarzun D A.Cascaded Multilevel Inverter with Regeneration Capability and Reduced Number of Switches[J].Industrial Electronics,IEEE Transactions on,2008,55(3):1059-1066.
[15]Laxman Maharjan,Shigenori Inoue,Hirofumi Akagi,et al.State-of-charge(SOC)-balancing Control of a Battery Energy Storage System Based on a Cascaded PWM Converter[J].IEEE Trans.Power Electron.,2009,24(6):1628-1636.