多逆变器并联的均流控制策略
2015-06-24张建文
张建文 王 鹏 王 晗 蔡 旭
(上海交通大学风力发电研究中心 上海 200240)
0 引言
近年来,随着电力电子技术的迅速发展,逆变器越来越朝着大容量的方向发展[1]。特别是在新能源应用领域,例如风力发电,光伏发电和蓄能电站等,其中逆变器的容量可以高达数MW。然而受制于功率开关器件通流能力,在大功率应用场合特别是在低压大电流领域,单逆变器技术方案难以满足功率输出的要求,只能采用多个逆变器并联的技术方案以提高逆变器的输出功率。并联技术的采用使得在大容量应用场合采用低功率等级的开关器件成为可能,降低了生产成本;同时,采用并联技术便于进行模块化设计以缩短生产周期,并拓宽了功率模块的使用范围[2,3]。
一般采用的单套逆变器系统为三相三线制结构,所以没有零序环流通道,故不存在环流问题,但在多逆变器并联的系统中,存在环流通道,如果不加以抑制,就会引起严重的环流问题[4-6]。由于环流只在并联的逆变器之间流动,并不体现在并联逆变器的输出总电流中,因此环流的存在一定程度上降低了系统的有效容量,同时增加了电路的损耗,降低了系统的效率[4,5]。由于逆变器等效直流内阻和输出引线的电阻很小,并联逆变器各模块输出电压之间较小的直流分量差也会造成较大的直流环流。过大的直流环流有可能使逆变器输出滤波电感饱和,使得逆变器不能正常工作;其次,即使各模块输出电压的幅值和相位相同,由于直流环流的存在,各模块的热应力和电应力仍不均衡,降低了并联系统的可靠性。环流还会引起不均流问题,从而使功率开关器件承受的电流应力不均衡,影响其使用寿命,并限制了系统容量的增加[4-6]。因此,环流抑制和均流控制是多并联逆变器控制必须要解决的关键问题。
消除环流主要有两种方法。一是在硬件上消除环流通道,一是软件上采用适当的控制方法对环流加以抑制。文献[7]采用交流侧带隔离变压器的方案,阻断了交流侧环流通路,但是隔离变压器的体积和重量很大,使得系统的成本大大增加。文献[8]提出的独立直流母线拓扑结构,消除了环流通道,但这种拓扑结构只适用于具有电气隔离作用的六相电机,不适用于三相电机,应用场合受到严重限制。文献[9]将并联变换器当作一个整体来控制,从控制方法上抑制了环流,但这种方式控制复杂,当更多模块并联时很难实现。
针对上述问题,本文建立了多个逆变器并联拓扑数学模型,在此基础上,定义了衡量环流大小和不均流程度的数学公式,分析了环流和不均流的形成机理,证明了环流产生的根本原因是由于各并联逆变器输出电压不一致造成的,因此,抑制并联逆变器环流的最有效办法就是通过调节各个并联逆变器的输出电压使之基本相等从而抑制环流。
本文设计了一套基于主从式控制结构的数字控制器,通过高速光纤串行通信将各个子控制器采集的模拟信号传送至主控制器中进行集中处理;主控制器同样通过高速光纤串行通信向各个从控制器发送相同的脉冲占空比信息,通过高速光纤串行通信同步发送机制,确保各并联逆变器输出电压的一致性;此外,主控制器在每个开关周期内向各个从控制器发送硬件同步信号,确保各个子控制器中三角载波的同步性;在保证逆变器输出端电压基本一致的条件下,提出一种脉冲延时补偿方案对由于逆变器输出阻抗不一致所导致的相电流不均流问题进行了补偿。最后,在实验室样机上进行了实验验证,实验结果验证了理论分析以及提出控制策略的正确性。
1 多逆变器并联的数学模型
图1所示为多个逆变器并联驱动异步电机的结构示意图,系统由N个结构完全相同的三相 IGBT全控桥(BH-1,…,BH-N)组成,所有N个三相全控桥的直流端均连接在一起,三相全控桥的输出端通过均流电抗器L1,…,LN相连于一起接在异步电机的三相输入定子端。

图1 多逆变器并联的拓扑图Fig.1 Topology of multiple parallel inverters
多逆变器并联的控制目标:①控制逆变器输出的总电流平衡,也即流入电机的三相电流isa、isb和isc平衡;②抑制各子逆变器之间的环流;③抑制各子逆变器输出电流的不均流现象,即控制isa1=··=isaN,isb1=··=isbN和isc1=··=iscN。
1.1 多逆变器并联的电流分析
图2所示为N个三相逆变器并联接异步电动机的等效数学模型。假设每个并联逆变器的三相串联均流电抗器和线路杂散参数相等,图中uan、ubn和ucn分别为n个并联逆变器的输出三相端电压;Rn和Ln为考虑线路杂散参数以及加上各并联逆变器串联均流电抗器的等效电阻和电感;ua、ub和uc分别为电机三相定子端电压;Rs和Ls分别为电机的定子等效电阻和电感;ea、eb和ec为电机的三相感应电动势。

图2 多逆变器并联的数学模型Fig.2 Mathematic model of multiple parallel inverters
由图2,根据基尔霍夫电流定律可得

式中,iskn为第n个并联逆变器的k相相电流;ukn为第n个并联逆变器的k相输出端电压;uk为并联逆变器输出公共端k点端电压,其中k=a,b和c;Rln+jωLln为第n个逆变器输出端至电机定子公共端的输出线路的杂散阻抗参数,Rzn+jωLzn为第n个逆变器串联的均流电抗器阻抗参数,ω为逆变器输出电流的角频率。
为了更加有效地分析各并联子逆变器的输出电流平衡特性,定义如下两个变量:
(1)环流。定义第m个逆变器与第n个逆变器的k相之间的环流大小为

(2)不均流度。定义第n个并联逆变器的k相相电流的不均流度为

考虑下面两种情况下,多个逆变器并联系统的环流和不均流情况:
(1)各并联逆变器的串联均流电抗器与线路杂散参数均相等,即Z1=Z2=…=ZN=Z,则
式(2)可简化为

式(3)可简化为

由式(4)和式(5)可知,在情况(1)条件下,环流大小取决于逆变器的输出阻抗、各并联逆变器输出端电压的差值;不均流度取决于各个并联逆变器的输出端电压与多个并联逆变器输出端电压的均值的偏离程度。
(2)各并联逆变器的输出端电压均相等,即uk1=uk2=…=ukN=uks,则
式(2)可简化为

式(3)可简化为

由式(6)和式(7)可知,在情况(2)条件下,环流大小取决于逆变器输出阻抗的差异性;不均流度取决于各个并联逆变器的输出阻抗与多个并联逆变器输出阻抗均值的偏离程度。
由式(6)可知,当各并联逆变器输出端电压相等时,环流大小主要取决于各并联逆变器串联电抗器和线路杂散阻抗之间的差值,对于文中提出的系统,串联电抗器本身的值就很小,而线路杂散阻抗更是可以忽略不计,因此由于串联电抗器阻抗不一致所造成的环流是非常小的。
由式(7)可知,当各并联逆变器输出端电压相等时,第n个并联逆变器的k相相电流的不均流度主要取决于该相串联电抗器的导纳以及所有k相串联电抗器的导纳平均值,一般情况下,很难保证所有n个并联系统的串联电抗器的导纳值相等,因此不均流的现象总是不可避免的。
对于文中提出的系统,由于串联均流电抗器的值很小,综上分析可以得出以下几个结论:
(1)环流主要由并联逆变器输出电压差异性造成;不均流除了受各并联逆变器输出电压影响,还取决于各并联逆变器输出阻抗的参数差异性。
(2)由于本系统串联均流电抗器非常小,在并联逆变器输出电压差异性很小的情况,可以忽略由于逆变器输出阻抗不一致所引起的环流大小。
(3)由于很难保证所有N个并联逆变器的串联电抗器的阻抗一致性,因此即使在并联逆变器输出电压差异性很小的情况,不均流的现象也总是存在的。
综上分析,对于多个逆变器并联系统的控制,首要目标是控制各并联逆变器输出端电压相同,以主要抑制各并联逆变器之间的环流大小;然后在各并联逆变器输出端电压相同的情况下,通过其他控制方法对由于并联逆变器的输出阻抗不一致性而引起的输出相电流不均流进行补偿。
1.2 多逆变器并联的输出电压分析
图3为第n个并联逆变器的k相桥臂的输出等效示意图,图中utkn为上管IGBT的导通压降;ubkn为下管IGBT的导通压降,图3中设置母线电容的虚拟中点O点作为逆变器输出电压的参考零电位。

图3 逆变器的单相输出电路Fig.3 Topology of single phase for the inverter
图4为逆变器一个桥臂的PWM脉冲信号生成示意图,其中uref(t)为调制信号,uc(t)为三角载波。在一个开关周期内,逆变器输出电压ukn为

图4 逆变器PWM脉冲信号生成图Fig.4 PWM pulse generation block of inverter

式中,Udc为逆变器直流母线电压;skn为第n个逆变器的k相桥臂的开关函数,当第n个逆变器的k相桥臂上管 Stkn导通时,skn=1;下管 Sbkn导通时,skn=0。
在一个载波周期求输出电压的平均值,可得

式中,ton为一个载波周期内桥臂上管导通时间;T为载波周期;Dkn为第n个逆变器的k相桥臂的占空比。设uc(t)的幅值为1,采用规则采样可得

把式(9)代入式(8)可得一个开关周期内,逆变器输出平均端电压为

式(10)没有考虑桥臂死区的影响,死区的存在会使实际 IGBT的驱动信号与理想驱动信号存在偏移,产生所谓的死区效应,从而导致逆变器实际输出电压值与期望输出电压值之间存在一个误差电压[6]。
根据文献[6]可得误差电压表达式

式中,Tdkn为第n个逆变器k相输出死区时间。
综上,考虑IGBT的导通压降以及死区效应后,得到逆变器输出端电压表达式

由式(13)可以看出,逆变器输出端电压与直流母线电压、调制波、IGBT导通压降以及死区时间均有影响。
2 多逆变器并联的控制策略
针对多逆变器并联存在的环流和不均流问题,主要考虑从两个角度来解决:一是从器件和线路本身出发解决系统参数的一致性问题;二是从控制角度出发保证各并联逆变器输出端电压的一致性。
2.1 并联逆变器参数一致性考虑
为了抑制环流和不均流现象,对于参数的一致性问题,可以从如下几个方面考虑:
(1)各并联逆变器的直流母线接线端子之间应保持尽量短的连接距离,且连接线线径应尽量大,以降低母线寄生电感,避免各并联逆变器的母线电压出现不一致。
(2)选用同批次出厂以及经过一致性测试的功率器件,以保证各并联逆变器选用的 IGBT具有相同的开关特性和导通压降。
(3)选用同批次出厂以及经过阻抗一致性测试的串联均流电抗器。
(4)各并联逆变器的输出端子与串联均流电抗器,串联均流电抗器与异步电机的定子公共端之间的连接距离应尽量保持一致,从而保证各并联逆变器的输出线路具有相同的线路阻抗参数。

图5 多并联逆变器的主从控制结构框图Fig.5 Master-slave control block of the parallel inverters
2.2 并联逆变器输出电压一致性控制
为了保证各并联逆变器输出端电压相同,需要从控制角度保证:
(1)各并联逆变器对应的三相载波和调制波幅值应保证一致,相位要保证同步。
(2)各并联逆变器设置相同的死区时间。
(3)PWM调制策略采用SPWM调制,保证各并联逆变器输出电压中不含零序电压分量,从而保证各逆变器之间的零序环流几乎为零。
基于高速光纤串行通信同步发送机制的主从式系统控制结构框图如图5所示。
图5中BH-1,BH-2,…,BH-N为N个并联的逆变器,SC-1,SC-2,…,SC-N为N个从控制器,Master Controller为主控制器。
各从控制器的核心器件由FPGA和A-D转换器组成,主要负责采集各并联逆变器的电流,经过A-D转换器变为数字信号,通过FPGA上的串行光纤通信接口将数据发送至主控制器,同时将接收到的由主控器发送过来的逆变器占空比信息转换为对应的脉冲信号经过光纤通道送至逆变器的功率开关管驱动电路,同时接收逆变器功率开关管驱动电路送出的IPM故障信号,以对逆变器的IPM进行实时保护。
主控制器由A-D转换器,FPGA和DSP以及各种外围器件组成,其主要功能是采集异步电机的总电流、速度信号以及直流母线电压信号,经过A-D转换器变为数字信号,同时接收子控制器通过串行光纤通信接口传送的各个并联逆变器的电流信号,由DSP对所有模拟信号进行滤波处理,然后执行异步电机的控制算法,计算出来的占空比信息通过光纤串行通信口同步发送至各个并联逆变器的子控制器中;此外,主控制器通过一根同步信号线来同步各个子控制器中的载波信号,从而保证载波信号和调制波信号的一致性,同步信号和串行通信每个开关周期内执行一次。
采用基于光纤通信的主从控制器结构,基本上能够保证各并联逆变器载波和调制波的同步性,影响同步时序的误差因素有
(1)FPGA晶振。选用同批次一致性好的有源晶振,以减小一个开关周期内晶振的累积误差。
(2)串行光纤通信。保证串行光纤线的长度一致,采用高速率(10MHz)的光纤通信线,且串行通信比特率高达7.5Mbit/s,以尽量保证各从控制器能够同步接收到对应的占空比信息。
2.3 并联逆变器输出相电流均流控制
当控制各并联逆变器的输出端电压近似相等的条件下,根据式(6)可知,不均流度主要由线路参数的不一致性决定。
本文提出了一种延时 PWM输出脉宽来改善均流效果的控制方法。具体实现方法如下:当dkn>0时,则意味着输出线路lkn的阻抗Zn相比其他线路较小,此时可以考虑适当减小ukn的大小,从而达到减小dkn的效果;当dkn<0时,则意味着输出线路lkn的阻抗Zn相比其他线路较大,此时可以考虑适当增大ukn的大小,从而达到增大dkn的效果。
延时脉宽补偿法的实现有两种方法:
(1)开环补偿法。利用采用查表方法,通过测量不同电流情况下的不均流度来建立不同的补偿曲线簇,根据曲线进行脉冲宽度的延时补偿。该方法具有实现简单,基本不增加控制算法的优点;不足是补偿曲线建立比较复杂,需要经过长期反复测试获取实验数据,才能取得良好的控制效果,适应性较差,针对不同的并联系统,因为参数不一致,可能需要重新建立补偿曲线簇。
(2)闭环补偿法。即采用闭环PI调节的方法,通过监测不均流度,自动进行脉冲宽度的调整,直到不均流度接近为零,图6所示为闭环补偿法的原理框图。

图6 脉宽延时的闭环补偿法Fig.6 Pulse width delay compensation method
闭环补偿法的优点是能够实现自动补偿,可以适应不同并联数量的多逆变器并联系统;缺点是闭环控制器 PI参数调节困难,且增加控制算法复杂度;当N值很大时候,会大大增加程序的计算量,甚至无法实现。
2.4 系统控制框图
图7为异步电机用多逆变器并联系统控制算法框图。异步电机多采用矢量控制算法,控制器内环为电流环,外环为速度环。内环控制中,励磁电流给定值i*sd=ψr/Lm,其中ψr为转子磁链给定值,转矩电流给定值i*sq由速度外环得到,采用电流前馈解耦实现励磁电流和转矩电流的解耦控制;外环控制中,参考速度与实际速度比较,经过PI调节得到q轴参考电流值。通过内环闭环调节得到逆变器的控制电压,经过SPWM模块得到逆变器的占空比信息,再结合不均流计算模块输出的各并联逆变器的不均流信息,执行相应的均流控制算法,得到各并联逆变器的占空比信息。

图7 逆变器并联系统控制框图Fig.7 Control block of the parallel inverters system
3 实验结果分析
通过实验来验证所提多逆变器并联运行的控制策略的有效性。实验平台如下:690V/50Hz三相电网接一台PWM整流器控制直流电压Udc=1 100V,通过两台逆变器并联驱动一台350kW异步电动机,逆变器均流电抗L=40μH。数字控制器采用TI公司的浮点型 DSP芯片 OMAP137,FPGA选用 Xilinx的Spartan3A系列,型号XC3S1400A,模数转换芯片采用AD公司的16位芯片AD7656,模拟信号采样频率6kHz,开关频率3kHz。
本文采用开环查表补偿法来抑制两台逆变器并联运行的不均流情况,初步进行试验发现两个子逆变器的 C相电流不均流度几乎为零,而子逆变器BH-2的A相电流和B相电流相对较小,因此在实际应用中只需要对A相和B相电流进行补偿即可。在不同电流下通过反复测试,可以得到如图8所示的拟合补偿曲线。在实际应用中根据总电流大小,按照曲线查表得到需要补偿的脉冲时间进行补偿即可实现不均流控制,实验波形如图9和图10所示。

图8 并联逆变器的补偿曲线Fig.8 Compensation curves of the parallel inverters
图9给出了采用均流控制算法前和采用均流控制策略后的实验波形。由图9a可见反馈发电机电流进行控制并联逆变器的总输出三相电流平衡,但是两并联子逆变器的输出三相电流严重不平衡,特别是A相电流和B相电流的不均流现象尤为明显;图9b给出了采用均流控制后的波形情况,采用均流控制算法后两并联逆变器的三相电流平衡,且均占总输出电流的一半左右,从而大大降低了各并联逆变器输出相电流的不均流度,其中A相电流的不均流度由补偿前的34.1%降低到补偿后的 3.3%,B相电流的不均流度由补偿前的30.9%降低到补偿后的 2.5%,实验结果验证了均流补偿算法的正确性。

图9 两台逆变器并联的电流波形Fig.9 Experiments results of the parallel inverters
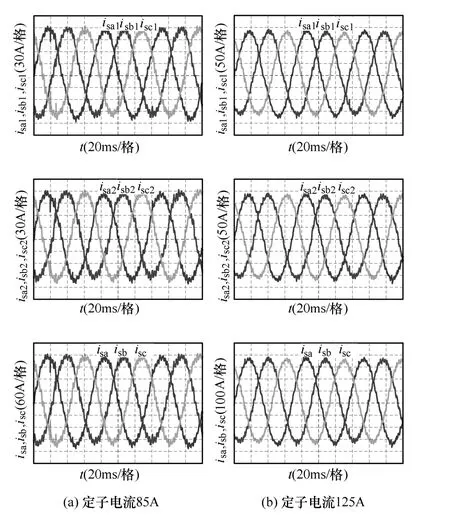
图10 不同定子输出电流下的控制效果Fig.10 Experiments results in different stator currents
图10给出不同电流下采用均流控制后的逆变器输出电流波形。由图10可知,采用图8所示的补偿曲线,在不同电流情况下,在保证总输出电流平衡的条件下,两个并联子逆变器的输出三相电流也实现了平衡,且其幅值均占总输出电流的一半左右,说明采用所述均流控制策略大大降低了并联逆变器输出相电流的不均流程度,从而验证了所述均流控制策略的正确性。
4 结论
通过设计主从控制器,利用高速光纤串行通信以及脉冲同步技术,解决了多并联逆变器输出端电压不一致问题;此外通过将脉冲调制方式改为SPWM调制方式,从而有效地抑制了并联系统中存在的环流问题;在上述基础上,提出一种开环脉冲延时补偿方法,对多并联逆变器输出的不均流问题进行了补偿。实验结果表明,提出的方法能够有效地解决多并联逆变器系统存在的环流和不均流问题。
[1]Boldea M I,Tutelea L,Serban I.Variable speed electric generators and their control: an emerging technology[J].Journal of Electrical Engineering,2002,l(3): 20-28.
[2]余蜜,康勇,张宇,等.基于环流阻抗的逆变器并联控制策略[J].中国电机工程学报,2008,28(18):42-46.
Yu Mi,Kang Yong,Zhang Yu,et al.Research on a novel current-sharing scheme based on circulating impedance of multi-inverter parallel system[J].Proceedings of the CSEE,2008,28(18): 42-46.
[3]于玮,徐德鸿.基于虚拟阻抗的不间断电源并联系统均流控制[J].中国电机工程学报,2009,29(24):32-39.
Yu Wei,Xu Dehong.Control scheme of parallel UPS system based on output virtual resistance[J].Proceedings of the CSEE,2009,29(24): 32-39.
[4]Ye Zhihong,Boroyevich D,Choi Jae-Young,et al.Control of circulating current in two parallel three-phase boost rectifiers[J].IEEE Transactions on Power Electronics,2002,17(5): 609-615.
[5]张宇,段善旭,康勇,等.三相逆变器并联系统中零序环流的研究[J].中国电机工程学报,2006,26(13): 62-67.
Zhang Yu,Duan Shanxu,Kang Yong,et al.The research of zero-sequence circulating currents between parallel three-phase inverters[J].Proceedings of the CSEE,2006,26(13): 62-67.
[6]于玮,徐德鸿,周朝阳.并联 UPS 系统均流控制[J].中国电机工程学报,2008,28(21): 63-67.
Yu Wei,Xu Dehong,Zhou Chaoyang.Control strategy of paralleled UPS system[J].Proceedings of the CSEE,2008,28(21): 63-67.
[7]Kun Xing,Lee F C.Interleaved PWM with discontinuous space-vector modulation[J].IEEE Transactions on Energy Conversion,1999,14(5): 906-917.
[8]李建林,高志刚,胡书举,等.并联背靠背 PWM变流器在直驱型风力发电系统的应用[J].电力系统自动化,2008,32(5): 59-62.
Li Jianlin,Gao Zhigang,Hu Shuju,et al.Application of parallel back-to-back PWM converter on the direct-drive wind power system[J].Automation of Electric Power Systems,2008,32(5): 59-62.
[9]Yoshihiro K.Cross current control for parallel operating three phase inverter[C].IEEE Power Electronics Specialists Conference,Taipei,China,1994:943-950.
