一类随机车辆跟随系统的控制策略
2015-06-24施继忠张继业徐晓惠
施继忠,张继业,徐晓惠
(1.浙江师范大学工学院,浙江金华321004;2.西南交通大学牵引动力国家重点实验室,四川成都610031;3.西华大学汽车与交通工程学院,四川成都610039)
一类随机车辆跟随系统的控制策略
施继忠1,张继业2,徐晓惠3
(1.浙江师范大学工学院,浙江金华321004;2.西南交通大学牵引动力国家重点实验室,四川成都610031;3.西华大学汽车与交通工程学院,四川成都610039)
为了改善高速公路的通行能力和安全性,考虑随机因素的影响,研究一类顾前顾后自动高速公路车辆跟随系统的控制器设计。基于伊藤随机微分方程建立了随机车辆动力学模型,运用滑模控制设计了随机车辆纵向跟随系统的控制规律。然后根据系统稳定性判据分析了控制系统的稳定性,得到系统控制参数的收敛区域为式(18)~(20)。数值仿真实验表明:各跟随车辆的速度、加速度等状态在较短的时间内能迫近领头车辆,车间距误差有较快的收敛速度,在15 s内收敛于0。
随机因素;车辆跟随系统;矢量Lyapunov函数;指数群稳定性;滑模控制
当前随着车辆不断增加,高速公路上的交通事故频发,交通堵塞问题日益严重。自动高速公路系统(automated highway systems,AHS)是解决以上问题的有效方法。AHS是指在高速公路上安装导航设备,根据车路通信和车间通信,达到对车辆状态的自动控制,从而实现无人驾驶。关于确定性自动高速公路系统的稳定性与控制,文献[1⁃10]等做了相关的研究。文献[1]通过定义无限维确定性关联系统的稳定性来研究车辆跟随系统。Stankovic等运用传递函数法研究确定性车辆跟随系统的稳定性,对系统进行了线性化处理[2]。Swaroop等运用数量Lyapunov函数法研究了自动高速公路系统的车辆跟随控制[3],但此方法很难解决具有强耦合项的关联系统。Zhang等运用矢量Lyapunov函数法,研究了确定性车辆跟随系统的稳定性[4],对文献[3]的结论进行了改进。文献[5]研究了具有脉冲扰动和变时滞的顾前车辆纵向跟随系统的稳定性与控制器设计。以上关于确定性车辆跟随系统的稳定性和控制的研究都是基于顾前型车辆跟随系统模型,即只考虑被控车辆之前车辆的状态,而忽略之后车辆的状态。事实上,对于编队中的每一被控车辆,既和之前车辆的状态信息有关联,也和其后车辆的状态信息相关联,因此需要研究顾前顾后车辆跟随系统。文献[6⁃7]研究了确定性顾前顾后车辆跟随控制。但以上文献的研究均没有涉及随机因素。事实上,在自动化公路车辆跟随系统中存在许多随机因素。例如车辆系统的建模存在随机误差,系统外部的干扰也存在随机因素,且这些随机因素对车辆控制系统的稳定性有重大影响。因此考虑随机因素研究车辆跟随系统的控制是有必要的。文献[8⁃9]研究了随机车辆跟随系统的稳定性,得到系统稳定的充分性判据,但研究没有涉及控制器设计。
本文考虑车辆系统建模时忽略的随机因素建立顾前顾后型随机车辆跟随系统模型。运用滑模控制法设计了系统的控制器,并根据系统的充分性判据研究了控制系统的稳定性。
1 系统模型及相关结论
在AHS中,引入随机因素的顾前顾后随机车辆跟随系统模型为[8]:

式中:i∈N,t∈[t0,+∞),xi∈Rn是第i个子系统的状态,∀i≤j,xi-j≡0,f,q是向量非线性函数,f,q:Rn×Rn×Rn→Rn,使得f(0,0,0)=q(0,0,0)=0。ξi=ξi(t)是定义概率空间(Ω,F,P)上的标准布朗运动,Ω是样本空间,F是样本空间子集的σ代数,P为概率测度。
对于孤立子系统

系统(1)是系统(2)的一个关联系统。
定理1[9]如果随机系统(1)满足下面的假设1和假设2,则该系统的零解是指数均方群稳定的。
假设2 存在正定函数Vi=V(t,xi(t)),xi∈Rn,i∈N关于xij连续二次可微,且存在正常数αk,k=1,2,3,4,5,使得式(5)~(8)成立。
式中:l、j=1,2,…,n,i∈N,L(2)(·)表示关于方程(2)的伊藤微分算子,定义如下:
2 控制器设计
模型如图1所示,其中v0、vi-1、vi、vi+1分别表示领头车、第i-1辆车、第i辆车、第i+1辆车的速度。x0、xi-1、xi、xi+1表示表示领头车、第i-1辆车、第i辆车、第i+1辆车的位移。对系统(1)的控制是指基于与被控车辆前后相邻的车辆和领头车的加速度、位移、速度等状态信息,凭借不断调节控制输入,控制该车辆的状态信息,不断调整车辆的速度和位移,缩小车间距的误差。
定义第i辆车和第i-1辆车的车间距误差为
ei(t)=xi-xi-1+Li,i=1,2,…
此处Li是指第i辆车和第i-1辆车的固定间距,车辆跟随控制的目的是使ei(t)能够渐近地趋于0。
考虑滚动阻力Fi为主要随机因素,第i个车辆的动力学行为可用随机微分方程表示为

式中:ξ为定义在概率空间(Ω,F,P)上的一维标准布朗运动,yi表示第i辆车的速度,ui表示控制输入,表示空气阻力,为路面对车辆的确定性阻力,Mi为车辆惯性因素。
滑模控制是研究不确定系统的有效控制方法[10⁃11],运用滑模控制法,选取切换函数:

式中:q1、q2、q3、q4是待定控制参数。σi(t)满足dσi(t)=q1dyi-1-(q1+q3)g(yi)dξ,Si=0,(i=1,2,…)为滑动模态域。设

其中,λ>0。根据式(12)~(14)得滑模控制律为
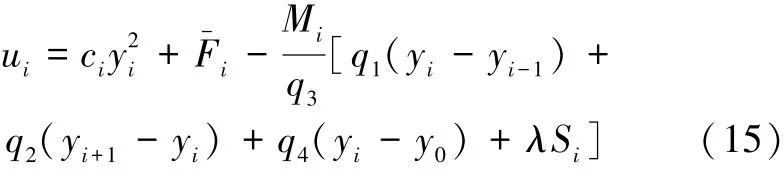
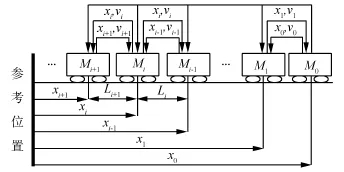
图1 系统模型Fig.1 System model
3 稳定性分析
3.1 滑动模态的可达性
选取Lyapunov函数Vi=S2i/2,关于时间对其求导,把式(15)代入,得

由于当Si≠0时,V·i<0。所以当t→∞时,有Si→0。故系统的滑动模态是渐近可达的。
3.2 滑模运动的稳定性
系统在滑动模态满足

式中:σi(t)满足dσi(t)=q3dy0-q3g(yi)dξ。这里的辅助变量σi(t)的作用与文献[11]类似,使得S·i不依赖于ξ。根据式(13)有

即

同理有

由Si-Si-1=0得d(Si-Si-1)=0,于是

令zi=e·
i=yi-yi-1,定义e0=0,e·0=0,则上式可变为
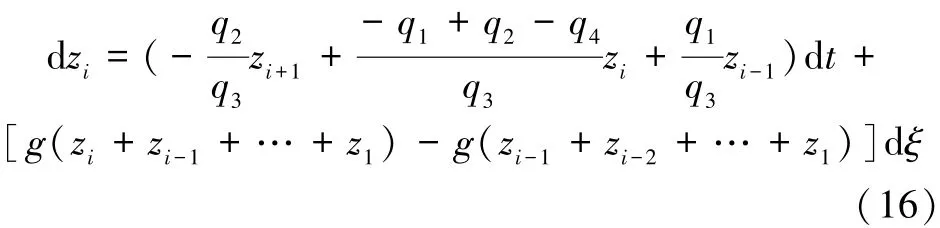
不难看出,系统(16)是系统(1)的一个特例。下面基于系统(1)的稳定性判据导出系统(16)的稳定性条件。系统(16)对应的孤立子系统为

若取Lyapunov函数Vi=V(zi)=z2i/2,i∈N,则系统(16)指数均方群稳定的充分条件为:
g满足Lipschitz条件:即存在常数k>0,使得
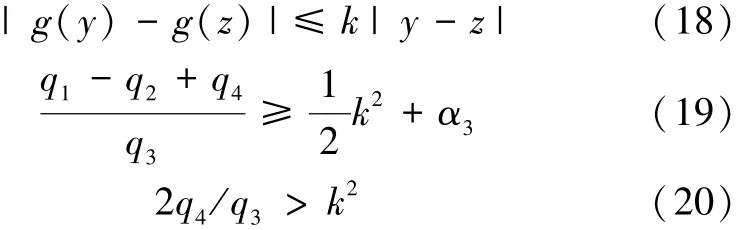
不难验证满足定理1的条件:取Vi=V(zi)=z2i/2,则α1=α2=1/2,则式(5)满足;易知α4=α5=1,因此式(7)也满足;由式(18)知假设1满足;由伊藤微分算子得
由式(18)得

由伊藤微分算子和式(19)得

即
则式(6)也满足;令Wi=eξtVi,则L(16)Wi=eξt(ξVi+L(16)Vi),根据Holder不等式,并经整理得


存在EWi-j,0=1,j=0,1,…,i-1,结合式(20)使得
则(8)也满足,由定理1得,系统(16)的零解是指数均方群稳定的。
4 仿真实验
仿真实例中的车辆跟随系统,由5辆车构成,1辆领头车和4辆跟随车。假定车辆质量都为1 000 kg,受到的摩擦力为200 N,空气阻力系数为0.5 N·s2/m2。控制规律取式(15),控制参数q1=2,q2=-3,q3=2,q4=4,λ=0.3。假设领头车的加速度在30 s内随时间的变化为

对于系统(16),用类似于文献[12⁃13]的方法进行仿真。仿真时间t∈[0,T],T=30 s,正态分布的方差为δt=T/N,N=300,长度Δt=R·δt,R=2,离散布朗轨道数M=1。初始位移为x0=100 m,x1=76 m,x2=70 m,x3=63 m,x4=55 m;车间距为L1=25m,L2=10 m,L3=10 m,L4=10 m;初始车间距误差为e1= 5 m,e2=4 m,e3=3 m,e4=2 m;初始速度v0=25 m/s,v1=25.5 m/s,v2=26 m/s,v3=26.5 m/s,v4=27 m/s。
仿真结果见图2~6。其中图2表示各跟随车辆的加速度在8 s后能迫近领头车辆,20 s后各车加速度趋于稳定;图3表示各车辆的速度变化曲线,各跟随车辆的速度在10 s后能迫近领头车辆,21 s后各车速度趋于稳定;图4为各车辆的纵向位置随着时间的变化曲线,各车辆能保持较为稳定的车间距;图5为滑模变化曲线;图6表示各车辆的车间距误差变化曲线,车间距误差有较快的收敛速度,在15 s内收敛于0。
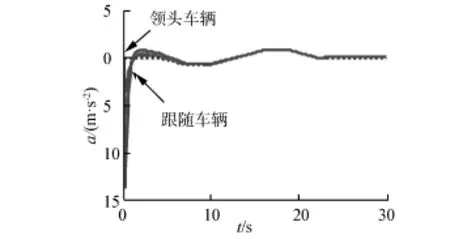
图2 各车辆加速度Fig.2 Vehicle acceleration

图3 各车辆速度Fig.3 Vehicle speed
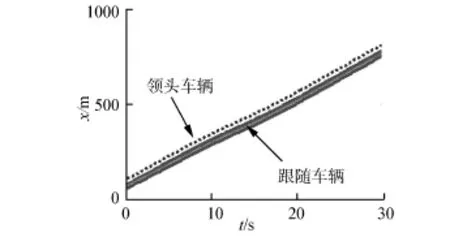
图4 各车辆位置Fig.4 Vehicle position
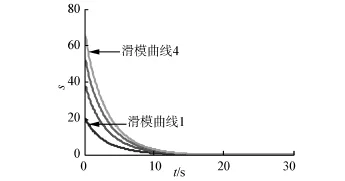
图5 滑模变化曲线Fig.5 Sliding curve
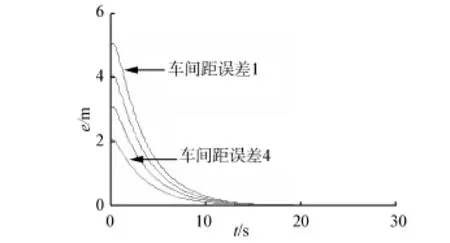
图6 车间距误差Fig.6 Vehicle spacing error
4 结束语
本文考虑随机因素的影响,研究了自动高速公路系统中的一类顾前顾后型车辆跟随系统的的控制策略。根据伊藤随机微分方程,建立了系统模型。基于随机箱体理论,运用向量Lyapunov函数法,研究了该系统的稳定性,得到基于随机因素的顾前顾后型车辆跟随系统指数群稳定性的一个充分性判据。运用滑模控制法设计了基于随机因素的顾前顾后型车辆跟随系统的控制器,并进行了数值仿真实验。
[1]CHU K C.Decentralized control of high⁃speed vehicle strings[J].Transportation Research,1974,8:362⁃383.
[2]STANKOVIC S S,STANOJEVIC M J,SILJAK D D.Decen⁃tralized overlapping control of a platoon of vehicles[J].IEEE Transactions on Control Systems Technology,2000,8(5):816⁃832.
[3]SWAROOP D,HEDRICK J K.String stability of intercon⁃nected systems[J].IEEE Transactions on Automatic Con⁃trol,1996,41(3):349⁃357.
[4]ZHANG J Y,SUDA T,IWASA T,et al.Vector Liapunov function approach to longitudinal control of vehicles in a pla⁃toon[J].JSME International Journal:Series C,2004,47(2):653⁃658.
[5]徐晓惠,张继业,张克跃.脉冲变时滞车辆纵向跟随系统的群指数稳定性与控制[J].控制与决策,2012,27(9):1293⁃1300.
XU Xiaohui,ZHANG Jiye,ZHANG Keyue.Exponential sta⁃bility and control of vehicle longitudinal following system with impulsive effects and time⁃varying delays[J].Control and Decision,2012,27(9):1293⁃1300.
[6]COOK P A.Stable control of vehicle convoys for safety and comfort[J].IEEE Transactions on Automatic Control,2007,52(3):526⁃531.
[7]任殿波,张京明,崔胜民,等.基于向量Lyapunov函数方法的顾前顾后型车辆跟随控制[J].中南大学学报,2010,41(6):2195⁃2200.
REN Dianbo,ZHANG Jingming,ZHANG Jiye,et al.Sliding mode control for vehicle following with parametric uncertainty[J].Electric Machines and Control,2010,14(1):73⁃77.
[8]施继忠,张继业,徐晓惠.时滞随机关联系统的群稳定性[J].自动化学报,2010,36(12):1744⁃1751.
SHI Jizhong,ZHANG Jiye,XU Xiaohui.String stability of stochastic interconnected systems with time delays[J].Acta Automatica Sinica,2010,36(12):1744⁃1751.
[9]施继忠,张继业,徐晓惠.无限维随机车辆跟随系统的稳定性分析[J].华中科技大学学报,2012,40(10):105⁃109.
SHI Jizhong,ZHANG Jiye,XU Xiaohui.Analyzing the sta⁃bility of infinite⁃dimension stochastic vehicle⁃following sys⁃tems[J].Journal of Huazhong University of Science and Technology,2012,40(10):105⁃109.
[10]MA L F,WANG Z D,GUO Z.Robust H2sliding mode control for non⁃linear discrete⁃time stochastic systems[J].IET Control Theory Apply,2009,3(11):1537⁃1546.
[11]NIU Y G,JIA T,HUANG J,et al.Design of sliding mode control for neutral delay systems with perturbation in control channels[J].Optimal Control Applications and Methods,2012,33(3):363⁃374.
[12]NIU Y G,HO D W,WANG X Y.Robust H∞control for nonlinear stochastic systems:a sliding⁃mode approach[J].IEEE Transactions on Automatic Control,2008,53(7):1695⁃1701.
[13]NIU Y G,WANG Z D,WANG X Y.Robust sliding mode design for uncertain stochastic systems based on H∞control method[J].Optimal Control Applications and Methods,2010,31(2):93⁃104.
Control strategy on a class of stochastic vehicle following systems
SHI Jizhong1,ZHANG Jiye2,XU Xiaohui3
(1.College of Engineering,Zhejiang Normal University,Jinhua 321004,China;2.Traction Power State Key Laboratory,Southwest Jiaotong University,Chengdu 610031,China;3.School of Automotive and Transportation Engineering,Xihua University,Chengdu 610039,China)
In order to improve traffic capacity and safety of highways,considering influence of random factors,the stability analysis and control for looking both ahead and behind of stochastic vehicle longitudinal following system in automated highway systems are studied.Based on the vehicle dynamics model which is established by the Ito sto⁃chastic differential equation,the control law for the stochastic vehicle longitudinal following system is designed by the sliding mode control method.According to stability criterion of the stochastic vehicle following system,the sta⁃bility of control system is analyzed and the sufficient conditions of the system for convergence are obtained by ine⁃qualities(18)~(20).Numerical simulation results showed that velocity,acceleration and other state of each vehi⁃cle can approach the leading vehicle in a relatively short period of time.The error of distance between vehicles fast converges to 0 within 15 s.
random factor;vehicle following system;vector Lyapunov function;exponential string stability;sliding mode control
10.3969/j.issn.1006⁃7043.201309064
http://www.cnki.net/kcms/doi/10.3969/j.issn.1006⁃7043.201309064.html
TP273
A
1006⁃7043(2015)02⁃0171⁃04
2013⁃09⁃20.网络出版时间:2014⁃11⁃27.
国家自然科学基金资助项目(11172247,11402214);浙江省自然科学基金资助项目(LY14E080006);教育部“春晖计划”资助项目(Z2014075).
施继忠(1977⁃),讲师,博士.
施继忠,E⁃mail:shijizhong@zjnu.cn.