海洋工程水下结构检测与清污机器人控制系统研究
2015-06-23刘海舰曾庆军宋振文
刘海舰,曾庆军,宋振文,梁 凇,常 路,张 明,陈 伟
(江苏科技大学电子信息学院,江苏镇江 212003)
海洋工程水下结构检测与清污机器人控制系统研究
刘海舰,曾庆军*,宋振文,梁 凇,常 路,张 明,陈 伟
(江苏科技大学电子信息学院,江苏镇江 212003)
针对自主研发的水下检测与清污机器人设计了一套控制系统.该系统分水面控制系统和水下控制系统两大部分,水面控制系统主要包括PC机、控制箱、脐带缆、控制摇杆等设备.水下控制系统包括嵌入式微控制器、视觉照明模块、安全保护模块、传感器模块、运动模块、供电模块等部分.并对控制系统的软件硬件进行了设计,建立了纵向和艏向动力学模型,根据ROV结构、功能特点等简化模型;设计了一种新颖的结合PID控制的约束输入输出的直接广义预测控制算法,并对水下机器人的艏向和纵向运动展开研究.仿真结果表明,该算法具有稳定性好、自适应强等优点,具有良好的控制效果.
水下机器人;控制系统;动力学模型;广义预测控制
海洋工程水下结构检测与清污机器人,是有缆遥控水下机器人(remotely operated vehicle,ROV)的一种,具有机动灵活、动力充沛、作业深度大、续航力强和环境适应性强等特点,被广泛应用于水下观察、海洋勘探、海洋平台的安装与维修、海洋管线的铺设与检修以及水下考古等作业[1-3].ROV通过脐带缆与水面联系,既可执行传统的水下任务,又可实现近距离结构检测,以及水下结构物、堤坝、船底等清污作业[4-5].因此,开展海洋工程水下结构检测与清污机器人控制系统的研究对于海洋工程的发展具有十分重要的意义.
1 控制系统总体设计
水下机器人控制系统由水面控制系统和水下控制系统两部分组成.水面控制系统包括上位机、鼠标、摇杆和水面控制台,其中将电源和通信设备集中于一个机箱以成为便携式水面控制箱,上位机软件和输入设备装在笔记本电脑上,远程控制水下机器人运动并实时显示水下传感信息和视频信息,其中包含水面控制台和通信接口方案设计.水下控制系统接收水面系统的控制指令,并返回水下传感器所接收的信息,其核心是嵌入式微控制器,外围元器件为视觉照明模块、安全保护模块、传感器模块、运动模块、供电模块.水面控制系统采用VB开发的上位机监控软件,RS485总线通过脐带缆与K60芯片作为主控芯片的水下控制系统进行通信.ROV水下机器人控制系统结构如图1.
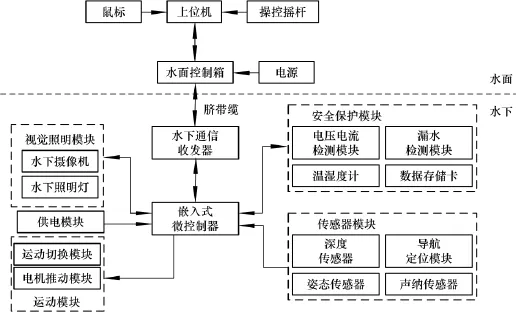
图1 ROV水下机器人控制系统结构Fig.1 Control system structure of ROV
2 硬件设计
2.1 水面硬件系统
ROV水面控制台上位机实时显示机器人状态信息和视频图像,同时采集控制信号,将其转换成RS485信号传送到下位机控制单元.上位机通过USB接口作为摇杆接入使用,摇杆可以控制机器人前进后退、左转右转、上浮下潜、定深等功能.文中采用EasyCap视频采集卡,传输差分视频信号经过双绞线视频传输器,输出AV信号到采集卡的AV口,通过程序调用控件进行视频显示.水面控制箱内装有220V交流转24V大功率直流电源,用于机器人本体供电,并安装了一个USB转RS485通信模块,实现与水下控制系统数据交换.
2.2 水下硬件系统
水下硬件系统控制板采用飞思卡尔MK60DN512ZVLQ10芯片为CPU,另外包括UART串口通信模块、FTM弹性定时器模块、PIT周期中断定时器、ADC模数转换模块、SDHC模块和GPIO模块等.
3 软件设计
3.1 水面软件系统
ROV水面控制系统的监控软件采集摇杆和键盘鼠标信息,并将这些信息转换成控制指令传送给水下机器人水下控制系统,同时显示水下摄像机视频图像以及各种状态信息.上位机监控软件主要包括:监控机模块,负责视频图像采集、摄像、拍照、压缩和保存;控制模块,负责接收键鼠、电脑触摸板、摇杆的信息,以及根据当前运动模式设置不同的推进器推力数据,将其发送到水下控制系统;特征信息模块,用于显示深度、惯性导航等数据,并保存进数据库以表格形式导出;报警模块,显示温度、湿度、漏水、过压、过流等报警信息,以及超过阀值的信号进行声光报警,并把报警数据存进电子表格.
3.2 水下软件系统
ROV水下软件系统结构如图2.下位机软件程序分为主程序和中断程序两部分,主程序是处理器在96MHz主频下循环运行,主要有系统初始化程序、报警信号采集程序、惯导数据处理程序、推进器控制程序、继电器控制程序等.中断程序用于提高处理器对任务事件的处理能力和实时性,主要包括以下3个:
1)上位机RS485通信程序.需要调用串口中断,并且优先级比较高,实时响应上位机的数据.
2)惯导接收程序.用来接收设计的惯性导航模块的数据,它们之间采用串口通信.
3)定时器中断程序.定时器用来对RS485通信进行定时复位,在中断中有个计数标志位,如果计数器达到计数阀值,则计数标志位复位;当RS485通信出现故障或者通信超时,没有及时复位计数标志位,那么在这个定时器中断中,会把RS485通信接收标志复位,重新接收,大大提高了通信系统的稳定性和抗干扰能力.

图2 下位机软件程序结构Fig.2 Structure of lower computer software
4 水下机器人动力学模型与广义预测控制器设计
以自主研制的水下机器人本体为研究对象,建立基于牛顿-欧拉方程的水下机器人动力学模型,并对模型做相应简化和变换,使之适用于常规广义预测控制.
4.1 定义坐标系
根据国际水池会议(ITTC)推荐的以及造船和轮机工程学会(SNAME)术语公报推荐的坐标系统,建立图3所示的两种基本坐标系:固定坐标系E-ξηζ和运动坐标系G-xyz,各坐标系按右手系确定.
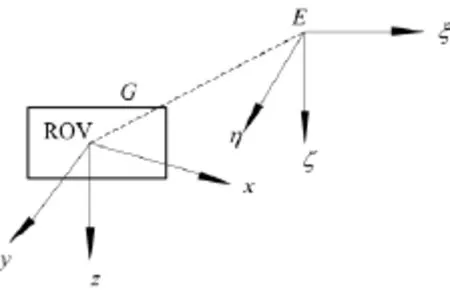
图3ROV坐标系Fig.3 Coordinate system of ROV
4.2 ROV动力学数学模型
1)运动参数定义
ROV在水中做6个自由度运动,分别为三轴移动和三轴旋转.水下机器人的位置和姿态,可以用运动坐标系G-xyz的原点在固定坐标系E-ξηζ上的坐标值(ξ0,η0,ζ0)和动系相对于定系的3个欧拉角(ψ,θ,φ)来确定[6],具体参数含义如表1.

表1 水下机器人运动及动力学参数Table 1Dynamics and kinematics parameters of the ROV
2)动力学模型
常用下述模型描述水下机器人动力学特性[7]:


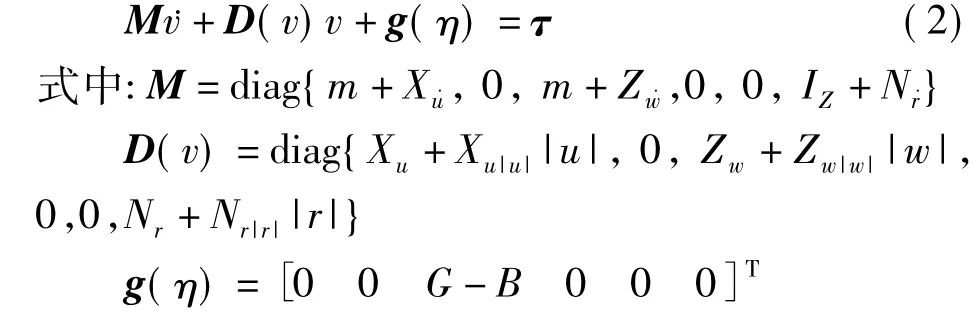
3)简化模型参数
文中对六自由度水下机器人运动模型在一定程度上简化.由于该水下机器人航速较低,可忽略科氏及向心力;主要运动包括前进、后退、上浮、下潜和转艏,忽略横倾和纵倾;其运动方式可看作为单自由度运动,各自由度之间粘性耦合较小;运动坐标系原点和水下机器人重心基本重合.设ROV重力和浮力分别为G,B,惯性量为I,推进器推力为τ,简化后的模型为[8]:
4)模型辨识及离散化
基于Fluent软件对ROV的水动力性能进行数值模拟分析,得到不同航态下对应的阻力,部分数据如表2.
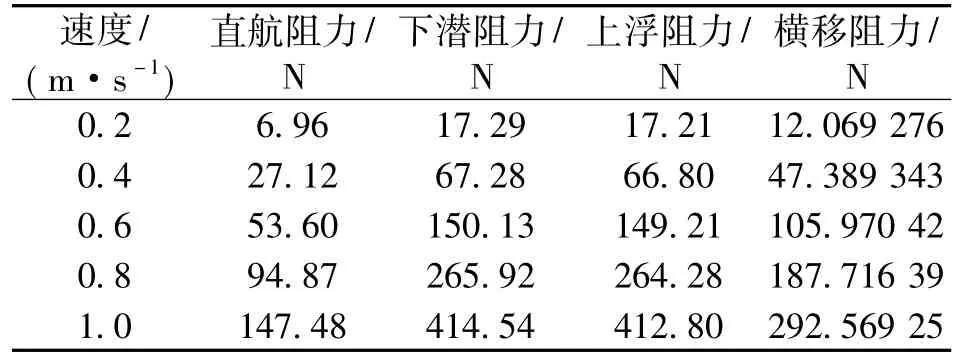
表2 不同航速下的阻力分布Table 2 Resistance state distribution of different direction and speed
根据数值模拟结果,采用最小二乘法辨识模型参数,得到纵向和艏向动力学模型分别为:

4.3 广义预测控制器设计
4.3.1 基本广义预测控制
在广义预测控制(generalized predictive control,GPC)中,常采用最小方差控制中所用的受控自回归积分滑动平均(CARIMA)模型描述受到随机干扰的对象[9]:


为避免直接跟踪参考序列导致震荡和瞬态响应下降,采用下列一阶滤波,使被控对象输出柔性地趋向设定值r:式中:KP,TI,TD分别为比例、积分、微分常数;ek,ek-1,ek-2为输出误差;T为采样周期.
5 ROV水下机器人仿真试验
水下机器人在近水面航行时,主要受海流(current)和波浪(wave)影响.由于航行速度和时间有限,航行水域也较小,可以近似认为海流不变[11].而波浪的运动是较为复杂的随机过程,常利用PM谱(pierson-moskowitz spectrum)进行分析、计算波浪运动.
PM谱在实际使用时难以预知,为简便起见,以纵向为例,采用如下方程简单描述波浪运动:

式中:ai为波浪幅值,ki为波数,ωi和εi分别为频率和初相.其在水平和垂直方向上的速度为:

5.1 艏向自由度运动实验
艏向运动模型为:

实验参数设置如下:
预测时域N0=1,N1=10;控制时域Nu=2;遗忘因子ρ=0.995;输出柔化系数α=0.1;输入柔化系数β=0.41;正定阵P=1 000 000 I.
PID整定时,选择KP=5,TI=1,TD=0.
在受到波浪扰动时,分别采用广义预测与PID-GPC算法对艏向运动进行仿真,其中y为艏向输出量,F为艏向推力,结果如图4,5.

图4 艏向广义预测控制输出、推进器输入Fig.4 System output and thruster input of GPC to heading angle

图5 艏向PID-GPC输出、推进器输入Fig.5 System output and thruster input of PID-GPC to heading angle
5.2 纵向自由度运动实验
纵向速度模型为:

实验参数设置如下:
预测时域N0=1,N1=12;控制时域Nu=4;遗忘因子ρ=1;输出柔化系数α=0.1;输入柔化系数β=0.53;正定阵P=100 000 I.
PID整定时,选取KP=2,TI=0.2,TD=0.1.
在无限深广的静水中,加入波浪干扰,分别采用广义预测与PID-GPC算法对ROV纵向仿真,其中y为纵向输出量,F为纵向推力,得到如图6,7.

图6 纵向广义预测控制输出、推进器输入Fig.6 System output and thruster input of GPC to longitudinal angle

图7 纵向PID-GPC输出、推进器输入Fig.7 System output and thruster input of PID-GPC to longitudinal angle
由图6,7可知,在应用广义预测控制(GPC)对水下机器人艏向、纵向进行控制时,输入在短时间内频繁的剧烈波动,容易造成后续控制失效,说明对于ROV艏向、纵向的控制,单纯采用广义预测将导致前期控制大幅震荡.引入PID后,控制效果(包括输入和输出)明显得到改善,输入转矩波动程度得到有效减小,对应的初始输出变化更加平缓,鲁棒性较好,优于单独使用PID或广义预测控制算法.
6 结论
文中针对自主研发的水下检测与清污机器人设计了一套控制系统.该系统分水面控制系统和水下机器人本体两大部分,并以ROV为研究对象,建立动力学模型,根据水下机器人结构简化模型.以基本广义预测控制为基础,研究和应用约束输入输出的广义预测直接算法,使用增量式PID改善GPC控制效果,仿真结果表明本方法的有效性及抗干扰能力.
References)
[1]Mu L J,Sardinha C,Chen C Y,et al.Remotely operated vehicle system implementation in open-water[C]∥Proceedings of the 2nd International Conference on Intelligent Technologies and Engineering Systems (ICITES2013).Germany:Springer Verlag,2014: 553-560.
[2]Whitcomb L L.Underwater robotics:out of the research laboratory and into the field[C]∥IEEE International Conference on Robotics and Automation(ICRA 2000).USA:IEEE,Piscataway,2000:709-716.
[3]Meinecke G,Ratmeyer V,Renken J.Hybrid-ROV-development of a new underwater vehicle for high-risk areas[C]∥MTS/IEEE Kona Conference.USA:IEEE Computer Society,2011:1-6.
[4]Arienti A,Calisti M,Giorgio Serchi F,et al.Poseidrone:design of a soft-bodied ROV with crawling,swimming and manipulation ability[C]∥2013 MTS/ IEEE San Diego Conference:an Ocean in Common.USA:IEEE Computer Society,2013:21-27.
[5]Molero A,Dunia R,Cappelletto J,et al.Model predictive control of remotely operated underwater vehicles[C]∥50th IEEE Conference on Decision and Control and European Control Conference.USA:Institute of E-lectrical and Electronics Engineers Inc,2011:2058-2063.
[6] 窦京.带缆遥控水下机器人总体设计及流体动力特性研究[D].江苏镇江:江苏科技大学,2014:21-26.[7] 王一云,严卫生,高剑,等.基于滑模变结构控制滤波的水下机器人水平面轨迹跟踪控制[J].计算机测量与控制,2013,21(2):382-385.
Wang Yiyun,Yan Weisheng,Gao Jian,et al.Autonomous underwater vehicle in the trajectory tracking control based on sliding mode control filter[J].Computer Measurement&Control,2013,21(2):382-385.(in Chinese)
[8]Petrich J,Stilwell D J.Robust control for an autonomous underwater vehicle that suppresses pitch and yaw coupling[J].Ocean Engineering,2011,38(1):197-204.
[9]Dunia R,Dunia R,Fernandez G,et al.MPC with conditional penalty cost:Industrial Electronics[C]// 35th Annual Conference of the IEEE Industrial Electronics Society.USA:IEEE Computer Society,2009: 1657-1662.
[10] 符晓玲.一种隐式广义预测自校正控制算法及仿真研究[J].工业仪表与自动化装置,2011(2):7-9,21.
Fu Xiaoling.An algorithm of implicit generalized predictive self-tuning control and simulation[J].Industrial Instrumentation&Automation,2011(2):7-9,21.(in Chinese)
[11] 任立国.水下机器人广义预测控制与能耗问题研究[D].黑龙江哈尔滨:哈尔滨工程大学,2008:64-80.
(责任编辑:曹 莉)
Research on the control system of the marine engineering structure underwater detection and cleaning robot
Liu Haijian,Zeng Qingjun*,Song Zhenwen,Liang Song,Chang Lu,Zhang Ming,Chen Wei
(School of Electronics and Information,Jiangsu University of Science and Technology,Zhenjiang Jiangsu 212003,China)
For a self-develop underwater detection and cleaning robot,we designed a control system.The control system consists of water control and underwater control parts.The water part mainly contains the PC,control box,umbilical cable,control rocker and other equipment.The underwater control part includes embedded micro controller,visual lighting module and security module,sensor module,motion module and power supply module.In this paper,we designed hardware and software,and establish longitudinal and heading dynamic models,then simplify the model according to the function and structure features of ROV.Combined with PID control algorithm,a new generalized predictive control algorithm with input and output constraints is designed to study which function in the movements relative to longitudinal and heading degree.The simulation results show that this algorithm has such advantages as good stability and strong self-adapting,and it has great control effects as a whole.
remotely operated vehicle;control system;dynamic model;generalized predictive control
TP24
:A
:1673-4807(2015)05-0443-06
10.3969/j.issn.1673-4807.2015.05.007
2015-03-25
国家自然科学基金资助项目(11204109);江苏省高校技术船舶协同创新中心项目(1634871401-1);江苏省高校自然科学基金资助项目(14KJB510008)
刘海舰,硕士研究生.*通信作者:曾庆军(1969—),男,博士,教授,研究方向为先进控制理论与应用、现代化测控与智能系统.E-mail:zheng 28501@163.com
刘海舰,曾庆军,宋振文,等.海洋工程水下结构与清污机器人控制系统研究[J].江苏科技大学学报:自然科学版,2015,29(5): 443-448.