基于平衡式阵列的光电传感太阳跟踪系统
2015-06-21黄彦智赵佳庆
黄彦智,何 宁,赵佳庆
基于平衡式阵列的光电传感太阳跟踪系统
黄彦智,何 宁,赵佳庆
(桂林电子科技大学信息与通信学院,广西桂林 541004)
为了提高太阳能电池的能量转化效率,依据太阳运行规律和季节的变化特点,设计了一种光电跟踪和太阳轨道跟踪相结合的实时太阳跟踪系统。采用平衡式阵列光电传感与时钟计算组合方法,分析太阳运动轨迹与方位控制对阳光跟踪与能量转换效率的影响,基于四元阵光电传感对太阳运动轨迹与方向变化的阳光跟踪光电控制系统原理,通过光照强弱与时钟计算太阳历史位置进行快速跟踪。实验结果表明,该系统能实现太阳位置的二维实时跟踪和太阳能电池姿态控制,在光强大范围变化条件下也可精确地跟踪,大大提高了太阳光的利用率。
平衡式光电传感;太阳能;硅光电池;阳光跟踪;方位控制
太阳能作为新能源的代表,以其分布广、可循环利用、储量大、安全无污染等优点在能源更替中具有无可替代的地位。然而,它也存在能流密度较低、能量间歇性、光照方向和强度随时间变化等问题,这就对太阳能的收集和利用提出了更高的要求[1-2]。太阳能电池是一种半导体器件,其光电转换能量的多少,除了受自身制作工艺和材料影响外,还与能量转化效率有关。太阳跟踪系统能保持太阳能电池板正对太阳,使阳光垂直照射于电池板,获得最大转换效率。研究表明,单轴跟踪系统能提高发电量20%左右,而双轴跟踪系统能提高发电量达35%[3-4]。太阳跟踪系统主要有光电传感模式、视日运动轨迹模式和综合模式,其中综合模式跟踪效果较佳,但也存在缺点,如可追踪角度小,抗干扰性差,容易跟错或丢失目标,函数运算复杂,增加功耗[5-6]。针对现有太阳跟踪系统的不足,提出一种新四元阵列光电池传感跟踪和历史轨迹跟踪相结合的跟踪系统。该系统具有追踪精确、抗干扰性强等特点,能大大提高太阳光的利用率。
1 平衡式四元阵列阳光跟踪原理
平衡式四元阵列阳光探测器主要由4块硅光电池组成,光电传感器模型如图1所示,底部为阵元的光学结构,每个象限由一个独立的硅光电池构成,阳光经过凸透镜聚光形成均匀光斑,四元阵列硅光电池放置在透镜适当的焦面上。当太阳光线垂直于电池的感光面时,光斑圆心与四象限坐标原点重合,此时4个硅光电池电流在阈值范围内相等,其输出处于平衡状态;若入射光线与阵列感光面法线成角度入射,光斑成像落在4个象限的面积不相同,硅光电池输出的电流信号幅值不等,则输出处于非平衡状态,控制器根据4个象限的输出信号状态,调整阵元光电传感姿态,即可对入射阳光进行定位跟踪。由于光电池具有较大的光敏面,与大口径光学天线构建的系统结构简单,若采用光敏面较小的光电二极管,光学系统要求苛刻,且可追踪角度小,在光强大范围变化条件下,对阳光跟踪不利。
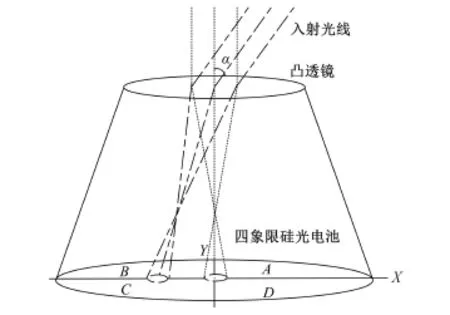
图1 光电传感器模型Fig.1 Photosensor model
本系统设计一种采用“光桶式”的光电传感器,图1表示在光线垂直入射经过透镜聚焦时,光斑能均匀落在传感器底部的四元阵列光电池上,且光斑随光线的入射角增大而偏移,当光斑偏移足够距离,离开阵列硅光电池,底部传感器就无法给出相应位置光电信号[7]。定义此时入射光线与光桶底面法线夹角α为最大追踪角,即光线入射角度小于最大追踪角α时,传感器能判断太阳位置,当光线入射角度大于α时,则传感器的输出信号无效。若以地球为静止参照物,则可认为太阳每隔1 h直射范围横跨经度15°[8],所以,圆锥形传感器增加底部宽度,使α角变大,在多云间晴的天气也能稳定地对太阳进行定位跟踪,提高了跟踪可靠性。
2 系统设计与实现
图2所示为系统硬件框图,可分为光电采集、单片机控制和上位机通信3个部分。
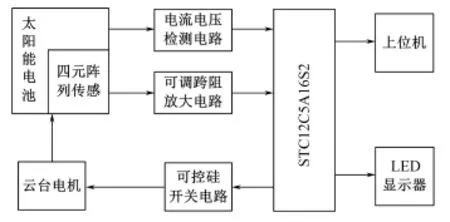
图2 系统硬件框图Fig.2 Block diagram of system hardware
光电采集部分包括四元阵列传感器、可调跨阻放大电路和电流检测电路。四元硅光电池阵列传感器与太阳能板放置在同一平面,且由云台电机控制同步转动。硅光电池以电流信号输出,而微处理器的有效输入为电压信号,因此,需要跨阻放大电路进行转换。可调跨阻放大电路除了能将传感器电流信号转换为电压信号外,还可调节4块硅光电池输出参数的一致性。处理器选用单片机STC12C5A16S2,其运算速度为普通51单片机的12倍,且自带8路10位A/D转换,简化了外围硬件电路。信号经过跨阻放大电路进入单片机处理后,计算出方位角和高度角,通过可控硅开关电路控制云台电机转动方向完成追踪。当天气不理想启动历史轨迹跟踪时,上位机根据当前时间从数据,库中提取历史对应时间的角度数据,返回给单片机,单片机发出指令控制云台电机转动,完成历史轨迹跟踪。
2.1 方位控制算法
四象限输出电流经跨阻放大电路转换成电压信号分为A、B、C、D四部分,依据太阳角度变化,位置跟踪按先方位角后高度角的顺序进行。以Y轴分成AD和BC两边电压,调整前先判断AD和BC电压大小,若电压差值大于设定阈值(0.03 V),电机进行方位角调整,通过循环比较,直到电压差小于等于阈值为止。同理,以X轴分成AB和CD两边电压,经过方位角的调整后,A和B的状态相同,C和D的状态相同,所以,AB和CD的电压差可简化为比较A和D(B和C)的电压差。当A和D的电压差高于阈值时,电机进行高度角调整,经重复比较调整使差值小于或等于阈值,完成高度角跟踪。跟踪算法流程如图3所示。

图3 方位控制算法流程Fig.3 Flow chart of orientation control algorithm
2.2 太阳历史轨迹跟踪
本系统采用历史轨迹跟踪,即太阳前一时刻轨迹跟踪。历史轨迹跟踪通过存储单元记录跟踪装置在历史对应时间的方位角和高度角,当阴雨天或复杂天气不适用光电跟踪模式时,控制器从存储单元中调出与当时最接近的一次历史对应时间记录的数据,确定当前跟踪装置角度。
系统实验采用小功率太阳能电池板对历史跟踪模式和固定模式2种状态进行测试,其参数为Pmax=4 W,Vpm=20 V,Ipm=190 m A。在太阳光照时间内对比阴天5个不同时刻测试的输出功率。从实验结果可知,只有在中午12:00,2块太阳能板受光面位置一致,太阳可正射到2块太阳能板,其输出功率大致相同,而在其他时刻,由于2块太阳能板的受光面位置不同,历史轨迹跟踪方式下的太阳能板跟随太阳运动轨迹移动,其输出功率明显高于太阳能电池板与地平面固定夹角为0°的输出功率。
2.3 平衡式光电传感器电平转换电路
采用4块硅光电池构成平衡式阵列传感器,每块光电池输出信号是相互独立的,单片机通过A/D转换获取对应四路传感电信号,通过运算判断输出是否达到平衡状态,调整硅光电池传感器姿态,以保证太阳能电池获取到最大光能。图4为平衡式四元光电传感器与单片机连接关系。
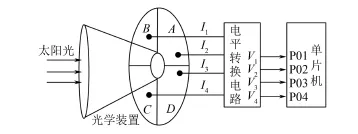
图4 四元传感桥臂连接图Fig.4 Four-element sensor connection diagram
由于光电传感器的输出电参数与单片机不匹配,需对光电传感器输出的电流信号转换为标准的TTL电平,才能送单片机进行处理。图4中的单片机内部A/D转换模块,通过软件设置可选择逐次比较型的10位转换工作方式,速度可达250 k Hz。4个光电传感器输出经电平转换后得到4路电平信号送单片机的P0口进行判断,若4个电平相等,表示四元阵列光电池处于平衡状态,此时阳光正射于阵列的中心位置,否则阳光处于斜射状态,P0口的4个电平不相等。图5为光电传感器的跨阻放大和电压采集组成的电流与电压转换电路。
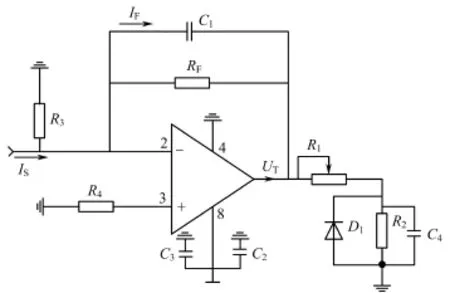
图5 电流与电压转换电路Fig.5 Current-to-voltage acquisition circuit
在理想运放条件下,输入电阻RI=0,故输出电压

其中:IS为光电传感器输出电流;RF为反馈电阻。实际输入电阻不可能等于零,因此,RF越大,转换精度越高。
为了保证单片机输入端得到标准TTL电平,系统采用电阻分压法,且在采样电阻R2旁并联一个5 V稳压二极管。电位器R1可调节分压比和A/D校准。根据分压原理,电压关系为:

其中:UT为传感电流转换后电压;R1为电位器电阻; R2为采样电阻。R1、R2已知,故由式(2)计算可得A/D转换端口的输入电压UO。
3 系统测试与数据分析
太阳能电池传感阵列与太阳运动的位置关系如图6所示。太阳方位角指太阳光线在地平面的投影与子午线的夹角,可近似看作竖立在地面上的直线在阳光下的投影与正南方的夹角。方位角以正南方向为零,由南向东向北为负,由南向西向北为正[9]。实验采用双电机二维机械结构对太阳的高度角和方位角进行精确跟踪,实时调整太阳能电池板姿态。
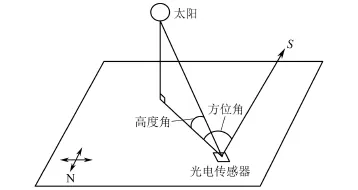
图6 太阳能电池传感阵列与太阳位置的关系Fig.6 Positional relationship between the solar sensor array and the sun
实验包括太阳高度角和方位角跟踪测试、阳光跟踪控制太阳能电池输出功率测试两部分。测试地点:某实验大楼顶楼天台(东经110.28°,北纬25.28°);时间:2014-12-20T9:00-17:00;天气:晴转多云。
3.1 太阳角度跟踪测试
在阳光跟踪控制太阳能电池跟踪系统的性能测试过程中,每隔30 min对系统进行一次角度数据采集,将实测所得的太阳跟踪系统转动角度的实际值与理论计算所得的当天该时段太阳位置数据进行对比拟合,跟踪测试曲线如图7所示。
经系统的阳光角度跟踪的实测数据和公式计算数据比较[10],结果差异在2°范围内。本结果与计算结果差异在可接受范围内,说明本系统的太阳角度跟踪性能良好。
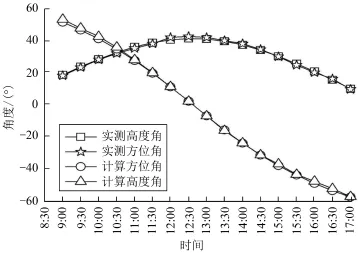
图7 太阳角度跟踪测试Fig.7 The solar angle tracking test
3.2 太阳能电池输出功率测试
测试实验采用2块规格型号完全相同、最大功率为4 W的太阳能电池板。一块安装在阳光跟踪装置上,电池正面与四元阵列光电传感器在同一平面;另一块与地面夹角成0°摆放。每隔30 min记录一次2块电池的输出功率,太阳能电池输出功率曲线如图8所示。
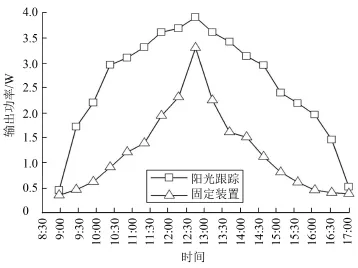
图8 太阳能电池输出功率曲线Fig.8 Output power curve of solar cell
从图8可看出,太阳跟踪系统的输出功率随时间变化的转换效率高于固定位置的系统,其跟踪后功率提高的比率特性如图9所示。
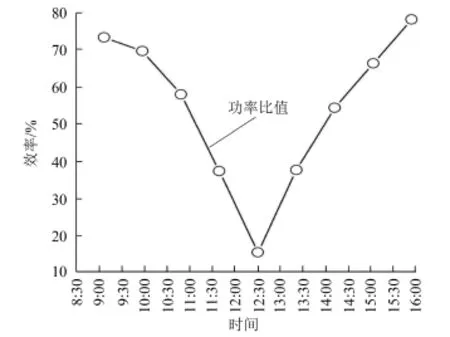
图9 功率提高比率特性Fig.9 Power increase ratio
实验测试结果表明,在同等辐射照度情况下,平衡式四元阵列太阳跟踪系统控制下太阳能电池的输出功率比平放在地平面上的太阳电池板的输出功率大得多。从图9可看出,上午9:00输出功率提高73.3%;中午12:30,2块太阳能电池板的阳光入射角度差值最小,仅提高15.6%;下午16:00阳光入射角差值变大,输出功率提高达78.1%。
4 结束语
设计了一种采用平衡式阵列光电传感跟踪与太阳历史轨迹跟踪相结合的太阳跟踪系统。实验测试表明,系统在太阳高度角和方位角2个自由度能自动完成二维跟踪,与太阳的运动轨迹保持同步,使入射阳光时刻垂直于太阳能电池板受光面,大大提高了太阳能电池的转换效率。在阴雨天气启用历史轨迹跟踪,实现2种模式相结合,保证了系统在复杂天气环境的稳定性,为太阳能技术应用发展提供一种有效的技术途径。
[1] 闫云飞,张智恩,张力,等.太阳能利用技术及其应用[J].太阳能学报,2012,33(增刊1):47-56.
[2] Noh H J,Lee D Y,Hyun D S.An improved MPPT converter with current compensation method for small scaled PV-applications[J].IEEE IES,2002,2:1113-1118.
[3] 宋孝炳,朱华炳,张希杰,等.高精度太阳能双轴跟踪器的设计研究[J].机械制造与自动化,2013,41(2):149-163.
[4] 白连平,马慧慧.光伏阵列朝向跟踪获取最大能量的研究[J].太阳能学报,2013,34(3):467-470.
[5] 徐晓冰.光伏跟踪系统智能控制方法的研究[D].合肥:合肥工业大学,2010:17-22.
[6] 饶鹏,孙胜利,叶虎勇.两维程控太阳跟踪器控制系统的研制[J].控制工程,2004,11(5):542-545.
[7] 杨亲民.传感器与传感器技术[J].电气时代,2000(8): 28-30.
[8] 刘鹏,陈海,毛伙南.太阳能发电阳光跟踪器综合性能分析[J].机电工程技术,2013,42(5):62-65.
[9] 谈小生,葛成辉.太阳角的计算方法及其在遥感中的应用[J].国土资源遥感,1995,15(2):48-57.
[10] 马健,向平.高精度太阳位置算法及在太阳能发电中的应用[J].水电能源科学,2008,26(2):201-204.
编辑:梁王欢
Sun tracking system based on balanced array photoelectric sensor
Huang Yanzhi,He Ning,Zhao Jiaqing
(School of Information and Communication Engineering,Guilin University of Electronic Technology,Guilin 541004,China)
Based on the sun rules and the seasonal changes,a sunlight real-time tracking system that combines photoelectric tracking and sun orbital tracking is designed.It adopts the method that combines balanced array photocell sensor with clock calculation to analyze how the trajectory of the sun and the battery azimuth control affects the efficiency of sun tracking and energy conversion.It discusses the solar photoelectric tracking control system theory of how the four-element array changes with the trajectory of the sun.The sunshine is quickly tracked through illumination changes and historical trajectory.The experimental result shows that it can achieve the two-dimension real-time tracking and battery management of the sun position and make accurate tracking on condition that the light intensity changes within a wide range,which greatly improves the utilization rate of the sunlight.
balanced photoelectric sensor;solar energy;silicon photocell;solar tracking;azimuth control
TP212;TK513.4
A
1673-808X(2015)05-0377-05
2015-05-16
广西科学研究与技术开发计划(桂科攻14124005-2-5);桂林电子科技大学研究生教育创新计划(GDYCSZ201417)
何宁(1958-),男,广西钟山人,教授,研究方向为光通信。E-mail:eicnhe@guet.edu.cn
黄彦智,何宁,赵佳庆.基于平衡式阵列的光电传感太阳跟踪系统[J].桂林电子科技大学学报,2015,35(5):377-381.
