视频传感器覆盖范围精细化计算方法*
2015-06-21王自然张亚南刘学军王美珍南京师范大学泰州学院江苏泰州225300南京师范大学地理科学学院江苏南京20023江苏省地理信息资源开发与利用协同创新中心江苏南京20023警用地理信息技术公安部重点实验室江苏常州23022
王自然,张亚南,刘学军,4,王美珍,4(.南京师范大学泰州学院,江苏泰州225300;2.南京师范大学地理科学学院,江苏南京20023;3.江苏省地理信息资源开发与利用协同创新中心,江苏南京20023;4.警用地理信息技术公安部重点实验室,江苏常州23022)
视频传感器覆盖范围精细化计算方法*
王自然1,张亚南2,3,刘学军2,3,4,王美珍2,3,4
(1.南京师范大学泰州学院,江苏泰州225300;2.南京师范大学地理科学学院,江苏南京210023;
3.江苏省地理信息资源开发与利用协同创新中心,江苏南京210023;4.警用地理信息技术公安部重点实验室,江苏常州213022)
视频传感器覆盖范围计算是视频传感器网络初始配置、优化部署等的核心基础,其精度严重影响覆盖分析的结果,然而现有很多方法并未考虑计算方法执行效率与精度的影响,而方法的精度与效率在大范围监控视频覆盖分析应用中显得尤为重要。因此,提出一种兼顾速度与精度的视频传感器覆盖范围计算方法,将地理空间进行格网化;计算每个格网角点被视频传感器覆盖的状况,用0或1表示;接着,以格网四个角点的覆盖情况描述格网的覆盖情况,将格网分为16种覆盖状态;逐步细化整个格网覆盖状态非(0000)和(1111)的格网,直至达到预设精度;获得视频传感器的覆盖范围。实验结果表明,该方法能够更为精确地获得部署在地理场景中视频传感器的覆盖范围,同时兼顾了计算方法的速度和精度。
相机覆盖;覆盖分析;二值化网格;格网细化
视频传感器,作为物联网中一种重要有向的视觉传感器,能够记录丰富的时空信息,有全天候、高度覆盖、实时性等优点,已被广泛应用于公共安全、交通管理、军事国防、环境监测等领域。视频传感器覆盖范围是表征视频传感器有效性的重要指标,是视频监控内容与地理环境进行融合展示的前提。覆盖范围计算是视频传感器网络初始配置、优化部署等分析[1-4]的核心基础,覆盖范围的计算精度严重影响覆盖分析的结果。
在传感器网络等相关领域,已经提出了一些视频的覆盖范围的算法。Erdem[5]提出了将视频传感器的可视域分割成多个“可视块”的算法。Hôrster等[6]、Mittal等[7]、Shen等[8]则用视线检测方法检测多边形可视域中各个节点的覆盖情况。Angella等[9]和Zhao等[10-14]将视线检测的方法推广到三维。Liu[15]分析了山体等锥形地形无线传感器网络的覆盖问题。而在视频传感器网络配置、优化等算法中涉及视频传感器覆盖计算的研究中,大部分研究将监控场景简化为二维平面,少量研究障碍物遮挡问题,无法表达视频传感器的真实覆盖。障碍物的遮挡问题方面,当分析场景中的障碍物(树木、建筑物等)时,多以简单的几何图形或者高墙代替。
然而,视频传感器在实际应用中是布设于真实的地理环境中的,并且视频传感器具有有向性的特点,其覆盖范围的计算可看作是一种特殊的可视域分析,得到的覆盖范围,可称作“视频可视域”[16],因此视频覆盖范围计算除了要考虑地形因素外,还需要考虑视频传感器参数,并且覆盖范围计算对视频传感器参数变化敏感,参数调整通常意味着覆盖范围的重新计算,而GIS领域主要关注地形起伏。近年来的研究多集中在提高方法效率,如并行化方法[17]、基于距离场映射的地形可视域分析方法[18]等,为视频覆盖范围计算提供借鉴。方陆明等[16]提出了基于数字高程模型(Digital Elevation Model,DEM)的视频可视域提取方法,实现了视频在DEM上的同步跟踪,但实验分析仅仅以单个视频的可视域验证了方法的可用性,对算法的效率未作讨论。
1 空间点覆盖计算
空间中的一地面点被视频传感器感知必须满足两个条件:①空间点在视频传感器的视棱锥中,即空间点在视频传感器中成像;②视频传感器与空间点之间不存在遮挡。条件①与视频传感器感知模型相关,条件②还与地理环境中的障碍物有关。
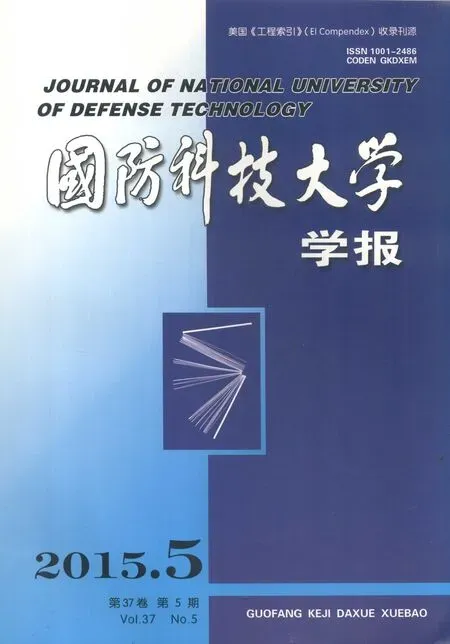
视频传感器感知模型如图1所示,视频传感器的光学中心C,坐标记作(XC,YC,HC),由CD1D2D3D4构成的棱锥即为当前视频传感器的理论覆盖范围,棱锥的大小可由相机的基本参数与姿态参数确定。基本参数包括:成像芯片尺寸、焦距(f)、中心点等。姿态参数包括:方位角P、俯仰角T、横滚角v。方位角P以某点的指北方向线起,依顺时针方向到目标方向线之间的水平夹角;俯仰角T则指从某点的水平方向线起,依顺时针方向到目标方向线之间的垂直夹角;横滚角v指视频传感器绕着“光学中心-靶面中心”轴顺时针旋转的角度。研究主要针对实际应用中最为常见的监控摄像机——摇摄-倾斜-变焦(Pan-Tilt-Zoom,PTZ)摄像机,其可以改变方位角、俯仰角以及焦距,不能改变横滚角,横滚角接近0°。因此空间点G,坐标记作(XG,YG,HG),与其对应图像点,坐标记作(x,y),可通过式(1)计算而得。式(1)中λ为尺度因子,不影响图像点的计算。
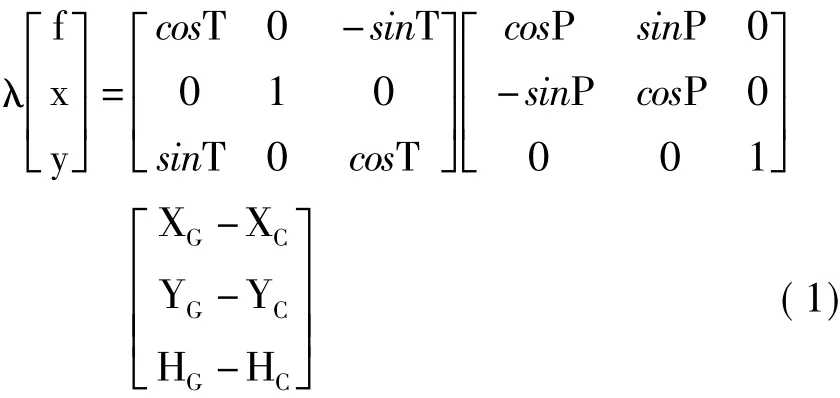
地理空间中一个点能被视频传感器感知到,需要视线与靶面有交点,即图像坐标满足x∈[xmin,xmax],y∈[ymin,ymax];[xmin,xmax]与[ymin,ymax]分别表示图像坐标系中图像点在坐标轴方向上的最大最小值。同时,视线之间无障碍点,即判断障碍物的高度是否高于当前视线与障碍物交点的高度,如图1所示,G1被覆盖,而G2未被覆盖。
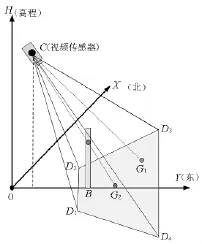
图1 视频传感器感知模型Fig.1 Perception model of camera
2 覆盖范围计算方法
2.1 方法基本思想
本文方法首先利用一个初始格网将地理环境进行格网剖分;其次,根据第1节判断格网点是否被当前相机感知/可视,若可视,则格网点的值表示为1,否则表示为0;再次,利用格网四个角点的感知状态表示单个格网的感知状态,再将所有的格网组合在一起,模拟整个空间区域的感知状态;最后,逐步细化格网覆盖状态非(0000)和(1111)的格网,直至达到预设精度,进而最终获得视频传感器的覆盖范围。该方法的核心思想是先空间离散,后空间内插,从而快速、准确估算视频传感器覆盖范围。
2.2 障碍物数据的获取与表示
障碍物高度可以从原始空间数据中获得,可以为固定值、图层的属性值、属性的表达式、无限高(∞)。修剪整齐的植被、围墙、电线杆等高度规格一致的障碍物可以使用固定值。一些障碍物的高度会保存在图层的属性值中,可以直接指定属性值为高度数据的来源。一些建筑物的图层没有高度信息,但是有层数的信息,此时建筑物的高度可以通过表达式(层高乘以层数)估计。此外,实践中在一些场合里,例如在计算道路两侧的路面视频监控的覆盖范围时,不需要考虑建筑物等障碍物的真实数值,可将障碍物看作是一堵无限高的墙,任何与墙有交点的视线都不能穿越,从而大大提升计算效率。
一般而言,地理数据可用点、线、面三种类型进行表达,不同的类型其几何信息都以坐标序列的形式存储,这就便于对其进行统一处理,因为根据实际情况,本文方法面状对象看作为闭合的线对象,将点与面对象转化为线对象进行统一处理,将点根据实际情况做一个缓冲区,形成一个闭合的线,如树木在地理信息系统中通常作为点对象存储,可根据树冠的大小将其变为线对象参与本文方法的计算。
本文方法主要关注视线上是否有遮挡,只需要获得视线上的对象高度即可,因此本方法在三维GIS可视域分析中也适用。
表1 格网二进制编码、覆盖情况及其面积Tab.1 Binary coding coverage and area of grids
2.3 格网覆盖状态二值表达
每个单元格有四个角点,每个角点有可被感知和不可被感知两种状态,分别用1和0标记,此值可根据1.2节方法计算而得。四个角点的感知状态(0或者1)按左上、右上、左下、右下排列组合,一共16种状态,用二进制编码可表示为(0000)2到(1111)2,对应十进制的0~15,每个编码表达了格网的一种被覆盖状态。编码与格网覆盖状态的对应关系如表1所示,从表1可以看出(0110)2和(1001)2状态存在歧义,即可能存在两种格网一个编码的情况。此时,检测格网中心点的感知状态,若格网中心可被感知,那么对应第一种状态,否则为第二种状态。
当一个格网的编码为(0000)2时,整个格网内状态视为“空”;同理,编码为(1111)2时,视为“满”。当格网状态为“空”或者“满”时,格网内
部状态匀质,表示当前格网表达的地理环境未被覆盖或者被覆盖;否则,当前格网非匀质,需要进一步处理以获得精确的覆盖范围。
2.4 格网逐步细化
在计算视频传感器覆盖范围过程中,视频传感器覆盖计算所确定的扫描格网的大小至关重要,扫描格网粒度过大,可能会导致面积较小的信息丢失;而格网粒度过小,会浪费大量的计算资源、存储资源。
针对格网尺寸对视频传感器覆盖精度与效率的影响,提出了通过细化格网采样的方法,对非(0000)2和(1111)2编码的格网进行逐步细化。本节将以图2为例,说明扫描细化过程。图2(a)表示初始扫描格网的大小,记作w0,格网编码为(1101)2,为非匀质网格,需要对格网进一步细化;格网大小取w0/2,如图2(b)所示,格网四条边的中点和格网的中心点这5个点,将格网分割成4份,计算5个点被视频传感器覆盖的情况,四个格网的编码从左到右从上到下分别为(1101)2,(1111)2,(0100)2,(1101)2,由于右上方的细化格网匀质,不需要进一步细化,其他三个格网需要进一步细化;取格网大小w0/4,每个二级格网被进一步细化,同时判断新增加的5个点的覆盖情况,细化结果如图2(c)所示,若当前细化粒度达到预期则不再细化,或者,当网格细化到一定程度,所有级别的网格都是“空”或“满”,格网也无须进一步细化。
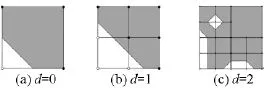
图2 格网分级细化Fig.2 Different levels of girds
格网细化结束后,覆盖面积CA可根据式(2)以及表1中的编码进行估算:
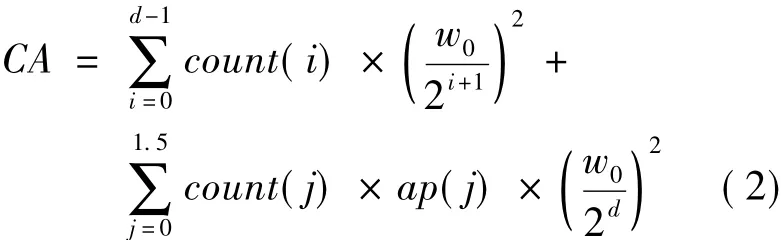
式(2)由两部分组成,前部分表示所有非最细层次的格网覆盖的面积之和,后部分表示所有最细层次的格网覆盖的面积之和。式(2)中,d表示格网细化的层数,count(i)表示第i层次中编号为(1111)2的格网数量,而count(j)表示编号为j (j=0,1,…,15)的格网的个数,ap(j)表示编号为j的格网其覆盖面积占当前细节层次的格网的比例,其取值参考如表1所示。图2(c)覆盖的面积即为:

2.5 二值格网覆盖范围计算方法
二值格网覆盖范围计算方法描述如下:
算法1二值格网覆盖范围计算算法Alg.1 Algorithm for Coverage estimation based on binary coded grids
本文方法中用一个三元组(d,i,j)表达格网中的一个格网的角点,d为层数,i表示行号,j表示列号。记0层格网的宽度为w0,0层格网的起始点(0,0,0)空间坐标为(X0,Y0),那么第0层的(0,i0,j0)点的空间坐标是(X0+i0×w0,Y0+j0×w0)。记(d,i,j)在第d+1层的标号为(d+1,2×i,2×j),可以得出结论:(d,i,j)与(d+n,2n×i,2n×j)空间位置相同。(d,i,j)点所在的空间坐标为(X0+(i×w0)/2d,Y0+(j×w0)/ 2d)。
3 实验与分析
3.1 实验
为了进一步验证方法的有效性和效率,并讨论初始格网尺寸和格网层次对方法的影响,本文设计了视频传感器覆盖分析实验。实验中障碍物主要包括建筑物与树木。
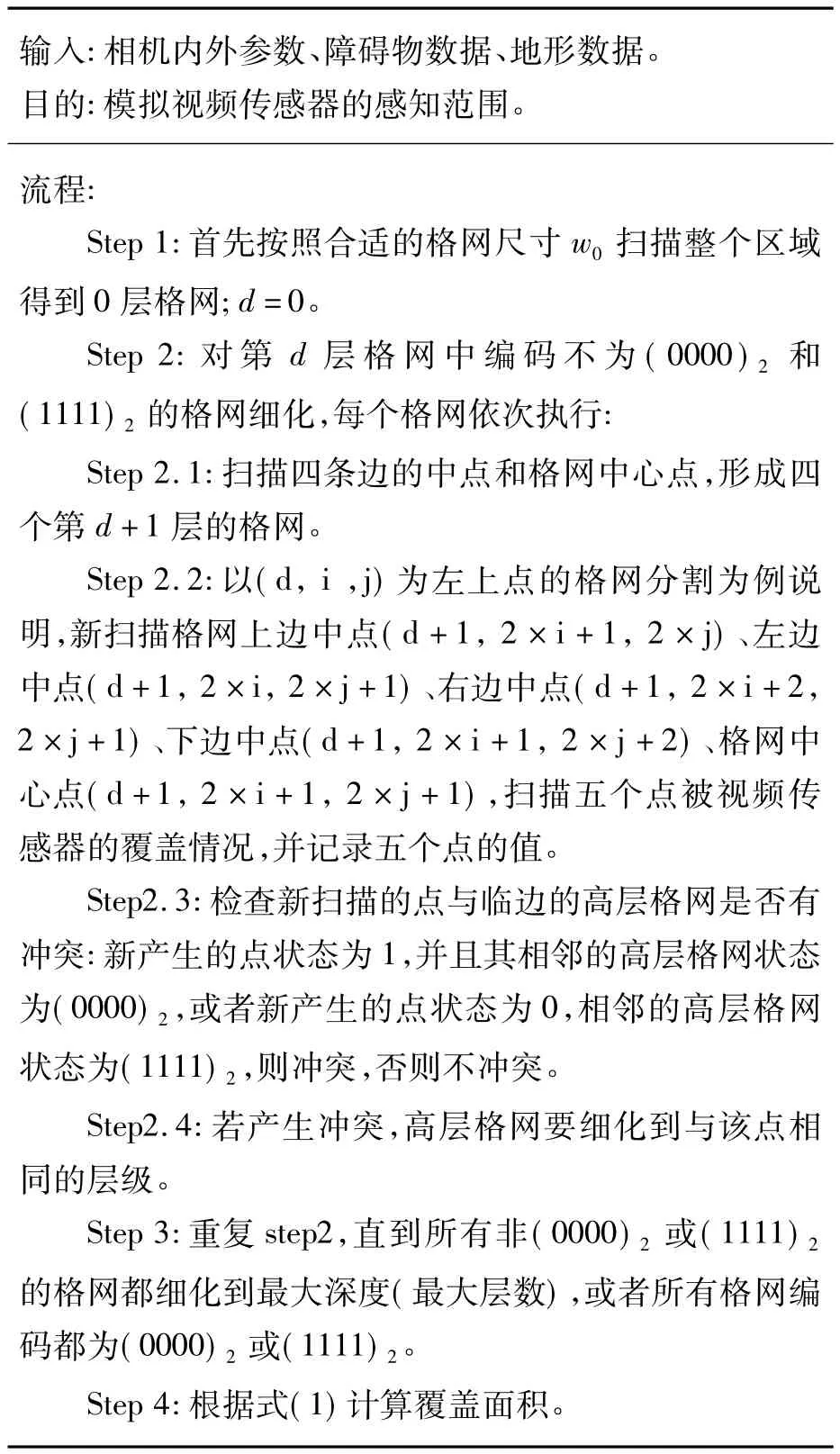
图3视频传感器覆盖计算结果Fig.3 Results of cameras coverage
图3 中共部署了6个监控摄像机,其中4个为云台枪机,其俯仰角和水平角度可调节,2个为固定枪机,其参数不可调,传感器参数参见表2,摄像机部署的地理位置及其覆盖范围如图3所示,图中深色半透明区域是视频传感器可以覆盖到的区域,半透明多边形中的编号对应表2中的编号。实验中以1m,2m,4m,5m为初始格网宽度,相对应的格网细化层次为0,1,0/1/2,2。由于布设在实际地理环境中的监控相机不易预先获取其真实的覆盖范围,因此无法与真实值进行比较,本实验中,将地理场景分别分为最大尺寸(4m ×4m)和最小尺寸(1m×1m)的剖分格网进行覆盖面积的计算,理论上,若本文方法覆盖面积与最小尺寸格网的计算结果接近,则表示效率相当。而格网点的个数表示需要扫描的点的个数,体现算法的执行效率,因此,实验中以扫描格网角点作为衡量效率的标准,实验结果见表3。
3.2 分析
理论分析本文最耗时的过程为格网角点覆盖情况判断。假设当前空间初始划分N×M个格网,即层次数d=0,此时需要判断(N+1)×(M+ 1)个角点的覆盖状况,这为本文方法的最好情况;若当前空间每一个格网都需要细化到d(d>0)层次,则需要判断(N+1)×(M+1)×(2×d) ×(2×d)个角点的覆盖状况,此为本文方法的最差情况。因此,从理论上讲,本文方法的效率介于将覆盖范围按照初始格网大小进行剖分和按照最细层次格网大小进行剖分的效率之间,且接近于按照初始格网大小进行剖分的效率,而覆盖面积精度接近于将地理环境剖分为最小网格时候的情况。若地理环境较为复杂,遮挡视线的障碍物多,其效率接近将空间划分为最细层次的格网时的效率;而当地理环境中地势平坦、障碍物少时,其效率接近将空间划分为最高层次的格网时的效率;若地理环境复杂度介于两者之间时,本文方法在计算效率方面具有明显的优势。
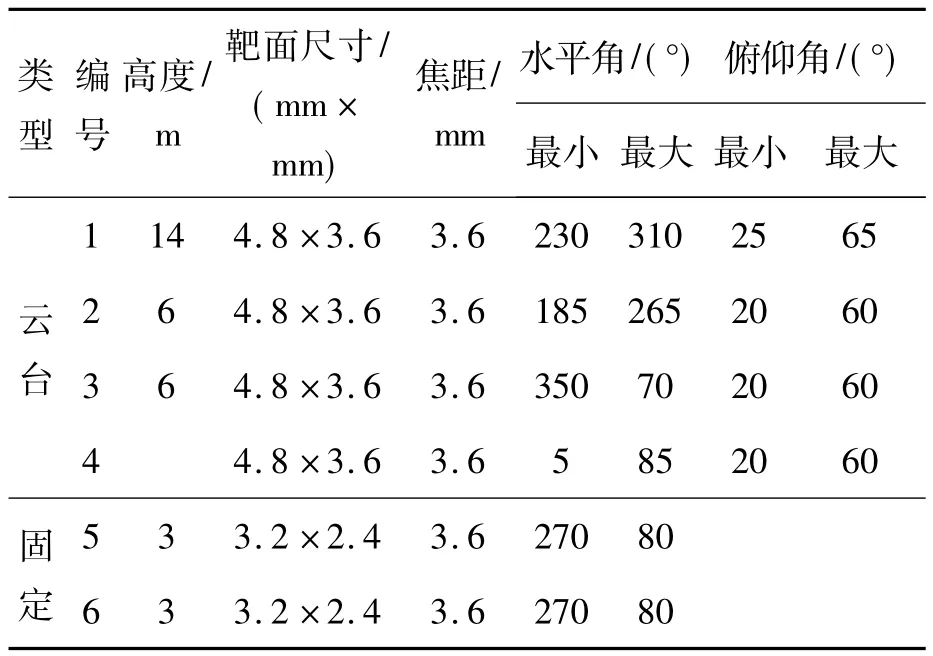
表2 视频传感器部署参数Tab.2 Parameters of cameras
本文方法以格网的四个角点的覆盖状态表示格网的覆盖情况,而不是用格网中心点的覆盖情况表示,以16种不同的覆盖情况代替2种覆盖情况,格网的覆盖情况被细化,相比较而言,本文方法估算的覆盖面积更精细。从理论上讲,地理环境被分割得越精细,覆盖面积计算的精度越高,但当地理环境简单时,精细格网分割并不能带来计算精度的显著提高,反而提高了计算时间;而地理环境复杂时,较大尺寸的格网分割必然导致格网内部信息的丢失。本文方法顾及了地理环境的复杂性,达到了计算效率与计算精度的平衡。
实验分析实验结果也证明了上述理论分析。由表3可知,本文方法采用逐层细化的策略,相对于地理环境以较小格网尺寸进行均一化划分时需要判断的格网角点显著减少,使得计算的时间大大缩短;相对于以较大格网尺寸进行划分时地理空间的信息可能被丢失,尽量细化非匀质的格网,从而使得计算精度得到保证。本文方法做到了精度和效率的平衡,尤其在大规模的传感器覆盖计算时,本文方法优势显著。
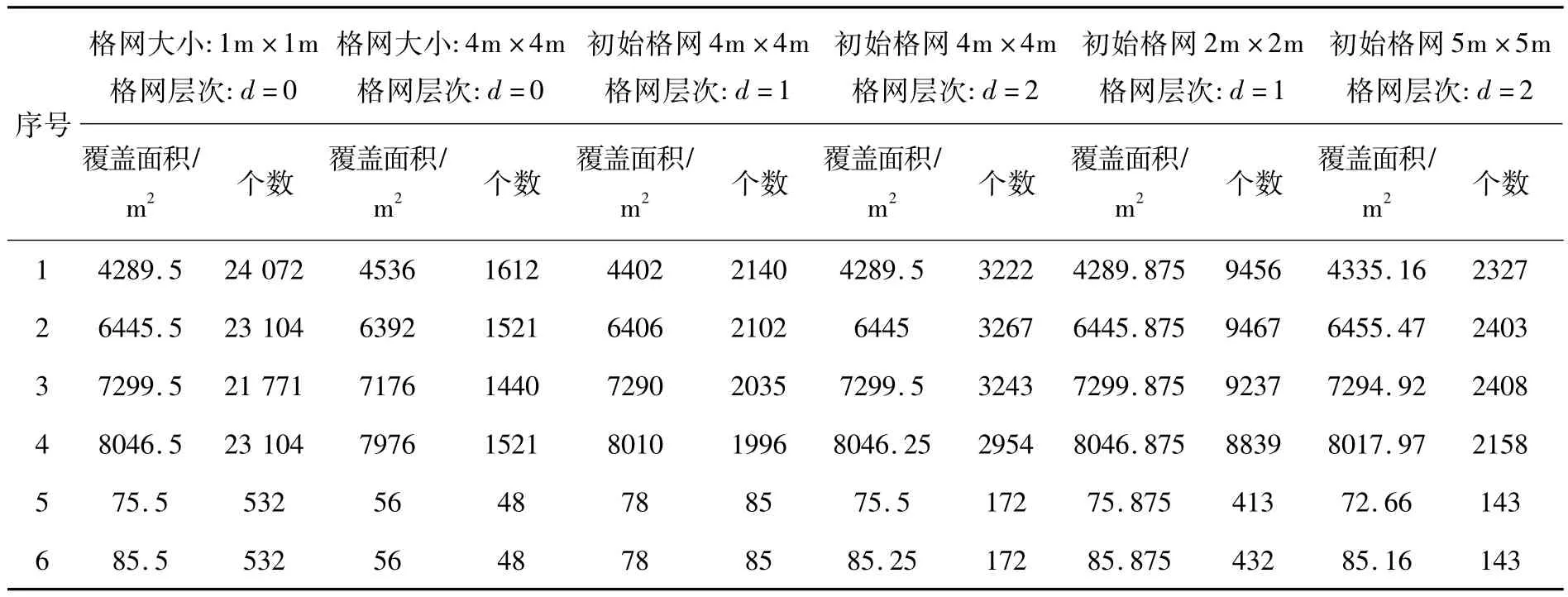
表3 实验结果Tab.3 Results of experiment
初始格网大小与格网层次是影响本文方法效率和精度的两个重要参数。从实际地理环境的实验可知:①在利用均一格网大小进行剖分时,即格网层次为0,如表3所示的第一大列(注:包括计算面积和扫描格网角点的个数,下同)和第二大列,初始格网越小计算的精度越高,格网每缩小1/2,所要扫描的格网点的数量即变为原来的4倍;②在初始格网大小一定的情况下,如表3中的第二、三、四大列,分割的格网层次越大,精度越高,但当格网层次到达一定程度后精度提高不明显,耗费的时间却明显增加;③在最小层次的格网大小相同的情况下,如表3中的第一、四、五大列,选用本文方法,其计算的精度几乎一致,与相同大小的格网均一剖分的精度相差无几,但其效率却提高数倍,此时初始格网大,效率越高;④当最小层次的格网大小接近,但初始格网大小和层次均不相同时,如表3中的第六大列,初始格网为5m剖分层次为2,其最细层次格网大小为1.25m,初始格网为4m剖分层次为2,两组数据的精度相当,并且扫描格网的数目也相当。与格网分割方向的关系的影响。如图4所示,图4(a)中梯形表示当前视频传感器地面高度上的可感知范围,圆点为扫描的点,黑色实心圆点处可被感知,白色空心圆点处不可被感知,图片下方中间位置的矩形区域局部细节放大效果图如图4 (b)所示,在梯形边缘处点非常的密集,而在其他区域比较稀疏,这是由于扫描格网方向与视频传感器覆盖范围的边缘并非正交,同时边缘区域的障碍物对视线的遮挡,导致视频传感器视域范围边缘处的格网内部非匀质,需要逐步细化格网才能获得精确覆盖范围值。
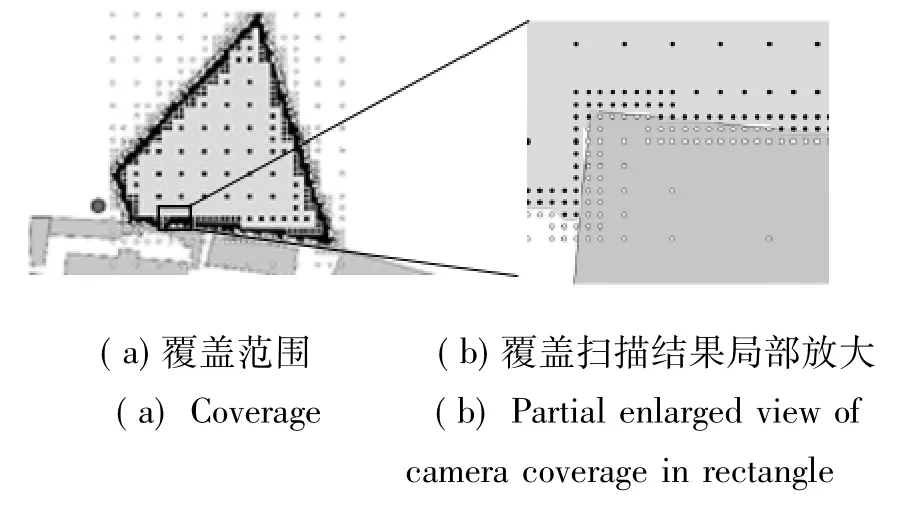
图4 二值格网覆盖扫描Fig.4 Coverage of corner points for the proposed method
本文方法在覆盖范围计算精度方面存在一些误差。分析误差来源:①离散化方法的固有特性,一方面,由于将地理环境进行离散的过程中不可避免的误差,增加格网的细分层次,细分格网到一定程度即可逼近真实覆盖范围,但实际应用中并不是无限制地细化,而是细化到覆盖面积变化不大即可;另一方面,格网剖分的方法无法处理格网中间有洞或者有岛的情况,本文方法也不例外,即使当前格网大小非最细级别,因为其编码为(1111)2和(0000)2,格网将不再细化,覆盖面积将被高估/低估,若格网中洞/岛面积不大,则对最终精度影响不大,否则将无法忽视其影响。在实际应用中,此种属于较为极端的情况,可以预先将较大尺寸的格网叠加在地理数据上,直观判断是否存在此种情况,然后通过调整格网大小来避免此种情况的发生。②地理场景复杂度,结合图4和表3分析,由于地理环境中存在遮挡,不同剖分格网大小对计算精度影响较大。因此,在地理环境简单的情况下,可选用较小的剖分层次,以减少格网点覆盖与否的判断过程,提高效率,同时使精度不下降。
4 结论
本文提出了用二值格网扫描近似计算视频传感器覆盖范围的方法。该方法顾及地理环境中的障碍物等,将视频传感器覆盖范围计算从一个连续空间的通视性分析转变到多个离散点的通视性分析,快速计算出覆盖范围;同时,利用格网细化的策略,分层次精细化覆盖范围,既可以降低需要处理的数据量,又可以保障覆盖范围计算的精度。为大范围地理空间中视频传感器快速、精细覆盖分析提供方法支持。本文的地理数据为二维矢量数据,对象的高度通过图层属性、手动设置等方式设置,能够用于地形较为平坦的城市区域的监控。
本文方法可移植到三维GIS平台中,因为其本质是基于数字表面模型(Digtal Surface Model,DSM)的可视域分析,只是此处可视域还受到相机参数的限制。本文方法尤其适合格网形式的DSM数据,其求得的覆盖面积即为DSM在平面上的投影面积,在以覆盖率为目标的视频监控网络/有向传感器网络优化方法中,用投影面积代替曲面面积,影响并不大。若能够利用三维数据更“真实”地模拟地理环境中的对象,采用本文方法能够快速获得更为精确的视频传感器覆盖范围。
References)
[1]陈文萍,杨萌,洪弋,等.视频传感器网络覆盖问题[J].计算机应用,2013,33(6):1489-1494.CHEN Wenping,YANG Meng,Hong Yi,et.al.Coverage problems in visual sensor networks[J].Journal of Computer Application,2013,33(6):1489-1494.(in Chinese)
[2]肖甫,王汝传,叶晓国,等.基于改进势场的有向传感器网络路径覆盖增强算法[J].计算机研究与发展,2009,46(12):2126-2133.XIAO Fu,WANG Ruchuan,YE Xiaoguo,et al.A path coverage-enhancing algorithm for directional sensor network based on improved potential field[J].Journal of Computer Research and Development,2009,46(12):2126-2133.(in Chinese)
[3]蒋一波,王万良,陈伟杰,等.视频传感器网络中无盲区监视优化[J].软件学报,2012,23(2):310-322.JIANG Yibo,WANG Wanliang,CHEN Weijie,et al.Coverage optimization of occlusion-free surveillance for video sensor networks[J].Journal of Software,2012,23(2):310 -322.(in Chinese)
[4]陶丹,马华东.有向传感器网络覆盖控制算法[J].软件学报,2011,22(10):2317-2334.TAO Dan,MA Huadong.Coverage control algorithms for directional sensor networks[J].Journal of Software,2011,22(10):2317-2334.(in Chinese)
[5]Erdem U M,Sclaroff S.Automated camera layout to satisfy task-specific and floor plan-specific coverage requirements[J].Computer Vision and Image Understanding,2006,103(3): 156-169.
[6]Hôrster E,Lienhart R.On the optimal placement ofmultiple visual sensors[C]//Proceedings of the4th ACM International Workshop on Video Surveillance and Sensor Networks,ACM,2006:111-120.
[7]Malik R,Bajcsy P.Automated placement ofmultiple stereo cameras[C]//Proceedings of the 8th Workshop on Omnidirectional Vision,Camera Networks and Non-classical Cameras-OMNIVIS,2008.
[8]Shen C S,Zhang C,Fels S.A multi-camera surveillance system that estimates quality-of-view measurement[C]// Proceedings of IEEE International Conference on Image Processing,IEEE,2007,3:193-196.
[9]Angella F,Reithler L,Gallesio F.Optimal deployment of cameras for video surveillance systems[C]//Proceedings of IEEE Conference on Advanced Video and Signal Based Surveillance,2007:388-392.
[10]Zhao J,Fusion S,Planning S,et al.Camera planning and fusion in a heterogeneous camera network[J].Dissertations&Theses-Gradworks,2012.
[11]Zhao J,Cheung S C,Nguyen T.Optimal visual sensor network configuration[J].Multi-camera Networks:Principles and Applications,2009:139-141.
[12]Zhao J,Cheung S S.Optimal visual sensor planning[C]// Proceedings of IEEE International Symposium on Circuits and Systems,IEEE,2009:165-168.
[13]Zhao J,Cheung S S.Multi-camera surveillance with visual tagging and generic camera placement[C]//Proceedings of 1stACM/IEEE International Conference on Distributed Smart Cameras,IEEE,2007:259-266.
[14]Zhao J,Yoshida R,Cheung S S,et al.Approximate techniques in solving optimal camera placement problems[J].International Journal of Distributed Sensor Networks,2013.
[15]Liu L,Ma H D,Zhang X.Analysis for localization-oriented coverage in camera sensor networks[C]//Proceedings of Wireless Communications and Networking Conference,IEEE,2008:2579-2584.
[16]方陆明,柴红玲,唐丽华,等.基于DEM的视频可视域提取算法[J].北京林业大学学报,2010,32(3):27-32.FANG Luming,CHAI Hongling,TANG Lihua,et al.An extraction algorithm of a DEM based video visualization domain[J].Journal of Beijing Forestry University,2010,32(3):27-32.(in Chinese)
[17]张刚,汤国安,宋效东,等.基于DEM的分布式并行通视分析算法研究[J].地理与地理信息科学,2013,29(4): 81-85.ZHANG Gang,TANG Guoan,SONG Xiaodong,et al.Research on distributed parallel visibility analysis algorithm based on DEM[J].Geography and Geo-Information Science,2013,29(4):81-85.(in Chinese)
[18]王晨昊,汤晓安,马伯宁,等.基于距离场映射的地形可视域分析方法[J].测绘学报,2011,5:563-568.WANG Chenhao,TANG Xiaoan,MA Boning,et al.Terrain viewshed analysismethod based on distance field mapping[J].Acta Geodaetica et Cartographica Sinica,2011,5:563-568.(in Chinese)
Fine camera coverage calculation method
WANG Ziran1,ZHANGYanan2,3,LIU Xuejun2,3,4,WANGMeizhen2,3,4
(1.Nanjing Normal University Taizhou College,Taizhou 225300,China;2.School of Geography Science,Nanjing Normal University,Nanjing 210023,China;3.Jiangsu Center for Collaborative Innovation in Geographical Information Resource Development and Application,Nanjing 210023,China;4.Key Laboratory of Police Geographic Information Technology Ministry of Public Security,Changzhou 213022,China)
Camera coverage is an important basis of camera network initial configuration,optimal deployment and so on.Its precision and efficiency are the critical influences on the results of coverage analysis,which are very important to the application of large area camera coverage analysis,butmanymethods do not consider them.A new method to efficiently estimate camera coverage was proposed.Firstly,the geographic space was dispersed into grids.Secondly,the statuses of the four corners of each grid were computed.If the cornerwas covered by the camera,the statuswas denoted by using1 or0.So the statusof the gird can be presented by the codewhich iseither0 or1.Consequently there are16 statuses to represent the status of a grid.Finally,if the code of the grid was not(0000)or(1111),the gird would be divided into four isometrical subgirds until the sub-girdswere small enough or their codes were(0000)or(1111).According to the levels and statues of all grids,the whole camera coveragewas estimated.Experimental results show that the proposed method can obtain more precise camera and can give consideration to both efficiency and accuracy.
camera coverage;coverage analysis;bi-valued grid;grid-fractionizing
TN95
A
1001-2486(2015)05-054-07
10.11887/j.cn.201505009
http://journal.nudt.edu.cn
2015-06-25
项目来源:国家自然科学基金资助项目(41401442,41201417);国家863计划资助项目(2015AA123901);江苏省高校自然科学研究面上资助项目(14KJB170011);博士学科点专项科研基金资助项目(新教师类)(20133207120017);江苏省测绘科研资助项目(JSCHKY201204);测绘遥感信息工程国家重点实验室资助项目(12E01);公安部科技强警基础工作专项资助项目(2014GABJC009);泰州市科技局科技支撑计划资助项目(TS036)
王自然(1983—),男,江苏盐城人,讲师,硕士,E-mail:wangzr@outlook.com