基于APES的超分辨广域成像算法
2015-06-19陈洪猛卢云龙
陈洪猛,李 明,卢云龙,左 磊,张 鹏
(西安电子科技大学雷达信号处理国家重点实验室,陕西西安710071)
基于APES的超分辨广域成像算法
陈洪猛,李 明,卢云龙,左 磊,张 鹏
(西安电子科技大学雷达信号处理国家重点实验室,陕西西安710071)
多普勒波束锐化(Doppler beam sharpening,DBS)技术可以快速地对广阔地面场景进行成像,但存在成像分辨率不高的问题。简单介绍了DBS的成像原理,建立了方位向超分辨的信号模型,并在此基础上提出一种新的超分辨广域成像算法。该算法将脉压后的回波信号建模为一系列不同多普勒频率散射点的叠加,利用幅度相位估计(amplitude and phase estimation,APES)方法对脉压后的数据进行多普勒分析,进行方位向的成像。仿真结果与实测数据表明,所提算法可以获得清晰的广域超分辨图像。
多普勒波束锐化;超分辨;幅度相位估计
0 引 言
多普勒波束锐化技术(Doppler beam sharpening,DBS)[12]作为非聚焦合成孔径雷达(synthetic aperture radar,SAR)的一种简单形式,是一种粗分辨成像技术。它利用运动平台导致的多普勒扩散来区分不同方位向的回波,实现比真实波束更精细的方位分辨,可以在较短时间内提供大场景的地面图像,其测绘带宽度是传统的SAR难以达到的。目前DBS主要应用于合成孔径雷达/地面动目标显示(synthetic aperture radar/ground moving target indication,SAR/GMTI)模式[37],对场景及目标进行粗略定位,从而为目标的精确打击提供参考。DBS相对于SAR计算负荷低,易于实时实现,在战场侦察、地形匹配制导、运动目标检测等领域有着广泛的应用。
文献[8- 9]分别从回波数据域和熵最小化角度研究了提高多普勒中心估计精度的方法,为后续的DBS成像提供了基础;文献[10]提出了一种基于Relax算法的DBS的成像算法,Relax谐波估计算法需要散射点数目先验已知,因此在一定程度上限制了其在工程中的应用;文献[11]对一种匀加速运动平台下的DBS成像方法进行了研究;文献[12]将SAR的方位聚焦处理方法推广到DBS成像中,提出了一种基于最小二乘拟合的DBS成像算法;文献[13- 14]对多普勒波束锐化图像的拼接算法进行了研究。
传统的DBS成像方法都是从傅里叶分析的角度出发,由于傅里叶谱为真实的信号谱与窗函数卷积的结果,当数据长度有限时,傅里叶谱的分辨率将受到限制,对幅度的估计误差比较大,因此DBS成像的分辨率受到很大限制,这种限制称为瑞利极限。基于Relax方法的DBS成像算法由于受实际目标散射点数目未知的约束,限制了其工程应用。本文从DBS成像的原理出发,建立了DBS方位超分辨的数学模型,将幅度相位估计(amplitude and phase estimation,APES)[1-517]算法应用到DBS方位向积累中,该算法克服了传统快速傅里叶变换(fast Fourier transformation,FFT)方法幅相估计精度不高的缺点,并且对成像场景中的散射点数目信息没有特殊要求,可以获得较高精度的成像结果。
1 信号模型
DBS成像实质上是将一个天线的真实波束分裂成若干个窄的子波束,由于各子波束中心处目标相对雷达的径向速度不同,从而造成各子波束回波间的多普勒频差,此时在频域设置一组窄带滤波器组,且该滤波器的中心和带宽分别对应各个子波束的中心和带宽,这样就可以实现多普勒分割,有效改善方位分辨力[18]。
假设载机在恒定的高度H平行于地面匀速飞行,飞机速度为v,飞行方向为X轴,其主波束方位向扫描角为θ,波束视线LOS与载机方向的夹角为,俯仰角为φ,雷达波长为λ,R0为雷达与点目标P之间的初始斜距,A(t)为信号的复包络。tn=n Tr(n=0,1,…,N-1)为慢时间,Tr为脉冲重复周期,N为相干积累脉冲个数,点目标回波的数学模型为

式中

由式(1)对tn求导,再除以2π可得多普勒频率为

假设波束视线LOS与载机飞行方向夹角为θ0,波束宽度为Δθ,波束的上下边界分别为θ0-Δθ/2和θ0+Δθ/2,分别对应的多普勒频移为fdh和fdl,则信号的主瓣多普勒带宽为

由于多普勒带宽随方位角不断变化,为保证DBS图像锐化比的恒定,通常采用重频不变FFT法[18]进行方位向的非聚焦处理。由于傅里叶变换存在瑞利极限,并且旁瓣较大,因此DBS的成像分辨会受到一定的影响,DBS的成像原理如图1所示。为此,本文从谱估计的角度提出一种超分辨成像算法。

图1 DBS成像几何原理
2 APES方位超分辨成像算法
2.1 APES超分辨成像模型
DBS成像主要依靠散射点目标与雷达之间相对运动所产生的多普勒信息来实现,因此如果能高精度地估计出每个距离单元各散射点的多普勒信息,就可以提高方位分辨率。假设回波信号已在距离向完成了脉压和距离走动校正,方位向可描述为一系列不同频率的散射点信号的叠加,即

式中,x(m,n)表示经过距离走动校正后的脉压数据;N为方位向的数据长度;X(m,wi)为第m个距离单元在单频wi处的信号复幅度;e(m,n)为加性高斯白噪声。构造L阶有限长单位冲激响应(finite impulse response,FIR)滤波器,其冲击响应为

构造信号矢量

则信号矢量通过滤波器的输出为

式中,m代表第m个距离单元;em,l为噪声输出;β(w)=[1 exp(j w)…exp(j(L-1)w)]T为信号的导向矢量,X(m,w)为第m个距离单元的频谱估计,是一个向量。
如果冲击响应满足

式中,[·]H表示共轭转置,则式(8)可以转化为

从式(9)可以得出,X(m,w)的最小二乘估计[15]为

如果令

则式(11)可以写成

实际应用中在频率轴上利用谱峰搜索即可求得各频率处的幅度估计值X^(m,w)。
信号L维自相关矩阵为

噪声和干扰的L维协方差矩阵估计为

滤波器选为

从上述分析可以看出,当滤波器的阶数L=1时,APES算法将退化为传统的FFT算法,由此可见,FFT算法是APES的一种特殊情况,当滤波器阶数L偏大时,谱峰估计的性能将会受到影响,理论表明[15],当滤波器的阶数L为采样信号长度的一半时,可以实现最优的谱估计性能。利用APES算法对脉压后每个距离单元的数据进行幅度和频率估计,得到^X(m,w),即为最后得到的超分辨DBS子图。
2.2 仿真分析
这里设定有7个单频信号目标,包括4个强目标,3个微弱目标。目标分布特性大概分为3组:第1组是两个强散射点目标;第2组是一个孤立的强散射点目标;第3组是在一个强散射点附近有3个微弱的散射点目标,且微弱散射点目标的幅度不同。假设信号的幅度a=[1 1 1 0.2 1 0.1 0.1],归一化频率w=[0.09 0.098 0.24 0.35 0.37 0.39]。信号采样点数为96,滤波器阶数为48,噪声为零均值、方差为0.01的高斯白噪声(信噪比约为6.2 d B)。图2分别为真实的信号频谱图,采用FFT方法,采用加窗FFT方法(海明窗)和采用本文方法的频谱分析结果。

图2 单频正弦信号频谱估计结果比较
从图2(b)可以看出,FFT方法的估计精度不高,在归一化频率0.1附近的两个目标几乎无法分辨;信号旁瓣较大,在归一化频率0.37附近,幅值较小的几个微弱目标的主瓣已经被强信号的旁瓣所覆盖。从图2(c)可以看出,加窗(海明窗)旁瓣抑制之后,分辨率下降,致使归一化频率0.1附近的两个目标无法分辨;主瓣展宽,使归一化频率0.37附近的小目标无法进行检测。相比较前面两种方法,从图2(d)可以看出APES算法的谱线在归一化频率0.1附近的两个目标的谱峰已完全分开,其频谱分辨能力已经突破了传统FFT算法的瑞利极限;旁瓣很低,在归一化频率0.37附近的3个小目标得到了很好的区分检测,说明APES算法可以获得更准确的频谱估计效果。
3 理论仿真与实测数据分析
3.1 雷达仿真数据分析
现采用仿真数据进行超分辨成像,系统仿真参数如表1所示。
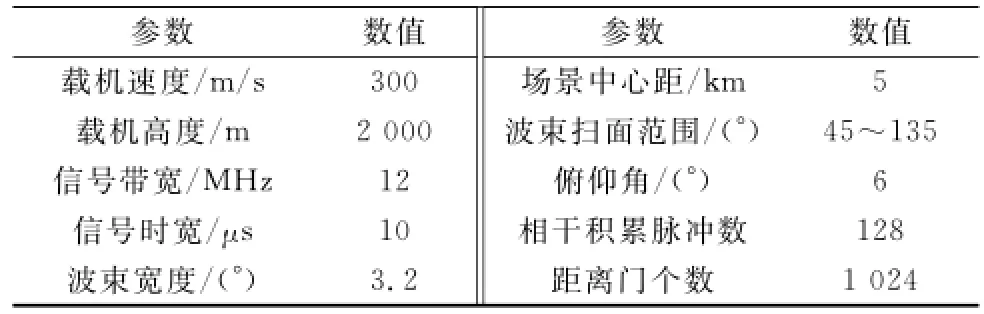
表1 系统仿真参数
假设天线在扫描过程中,与载机航向夹角为45°的波束内有7个点目标,目标的方位角及距离门号从小到大依次为[45°,200;44.5°,500;45°,500;45.5°,500;44°,800;45°,800;46°,800],此时目标在波束内成三角形排列分布,图3分别给出了传统成像(为抑制旁瓣,加海明窗处理)和本文超分辨成像的处理结果。

图3 成像结果对比
3.2 实测数据分析
为了对本文所提的超分辨方法进行直观的性能分析,采用一组机载雷达实测数据,雷达照射区域为某城市的郊区,地面场景中有一条河流及相关的支流,湖泊、池塘、农田和村庄等。分别采用传统的常规处理方法,Relax成像方法及APES超分辨成像方法,部分雷达系统参数如表2所示。
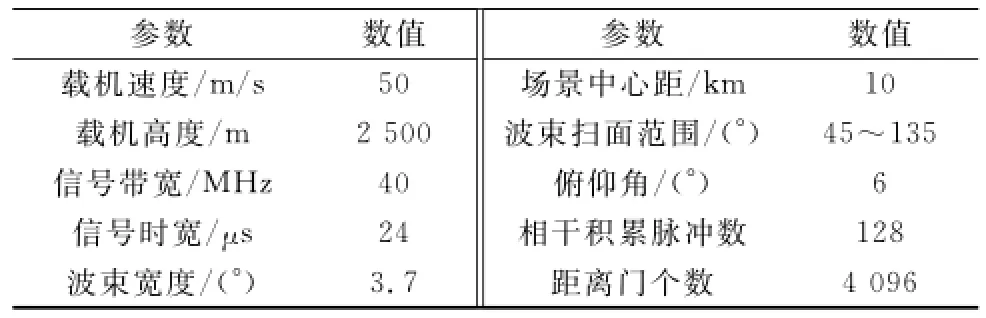
表2 机载雷达系统参数
在对实测数据的处理过程中,假定惯导提供的数据精度是可以接受的,并且在成像过程中对拼接的各幅子图进行仿射校正[14],得到常规DBS成像结果,基于Relax的成像结果(假设散射点数为方位向采样点数的2倍)和本文算法的超分辨成像,如图4所示。

图4 DBS成像结果对比
图4 (a)给出了传统DBS的成像结果,图中的农田及河流信息虽然可见,但对于图中的一些细节信息还是比较模糊,存在一定的散焦现象。图4(b)是基于Relax方法的处理结果,虽然Relax算法相较于传统方法性能有所改进,但由于场景中散射点的谐波数未知,因此限制了Relax方法的性能。图4(c)是本文超分辨的处理结果,从图中可以看出,农田及河流的细节轮廓信息更加明显,特别是图中具有强散射特性的建筑物也达到了很好的聚焦效果。
针对上面的扇形图,分别提取3种成像结果中的同一个局部区域,该局部区域包含了许多排列整齐的农田,这些农田被田埂分割成很多小的方块区域,且农田中存在一个强散射特性的建筑物,对比结果如图5所示。
从图5(a)可以看出,该局部图地面覆盖物的农田轮廓虽然可以看到,但图像对比度不高,散射点的细节比较模糊,特别是图中的白色建筑,存在明显的散焦现象。在图5(b)中,农田轮廓等边界信息虽然相较于传统方法有所改善,但整体而言图像还是有一定的视觉模糊。在图5(c)中农田轮廓、强散射建筑物边界及其他细节更加清晰,说明本文的超分辨算法在一定程度上提高了场景的分辨性能。

图5 DBS局部图像对比
为了对成像结果有一个客观的评价,引入评价图像标准的“熵”的概念,“熵”的定义为

本文对传统方法与本文算法的成像结果进行了熵值的统计,表3给出了每幅图像的熵值计算结果。
从表3的熵值对比中可以看出,无论是扇形图还是局部图,本文算法的图像熵值都要低于传统方法和Relax方法的图像熵值,说明DBS图像经过超分辨处理之后,图像的聚焦性能得到改善,分辨能力得到提高。

表3 图像的熵值统计结果
4 结 论
传统的DBS成像算法中,通常采用傅里叶变换实现方位向的非聚焦处理。由于傅里叶变换对信号谱分辨的精度不够,同时旁瓣比较高,因此传统DBS成像的分辨率受到较大限制。本文从DBS成像的原理出发,建立了一种方位超分辨信号模型,并在此基础上提出了一种广域高分辨成像算法,该算法突破了传统傅里叶变换的瑞利极限,无需散射点数目的先验信息,在不增加系统带宽的条件下,提高了雷达的横向分辨力,从而获得高分辨的广域图像。
[1]Mao S Y,Li S H,Huang Y H,et al.Study of realtime image by DBS on airborne PD radar[J].Acta Electronic Sinica,2000,28(3):32- 34.(毛士艺,李少洪,黄永红,等.机载PD雷达DBS实时成像研究[J].电子学报,2000,28(3):32- 34.)
[2]Radant M E.The evolution of digital signal processing for airborne radar[J].IEEE Trans.on Aerospace and Electronic System,2002,28(2):723- 733.
[3]Hu R X,Wang T,Bao Z.Accurate location method of moving target for SCAN-GMTI system[J].Systems Engineering and Electronics,2013,35(8):1607- 1614.(胡瑞贤,王彤,保铮.扫描GMTI系统运动目标精确定位方法[J].系统工程与电子技术,2013,35(8):1607- 1614.)
[4]Gierull C H.Analysis of the multimode feedhorn concept for multichannel SAR-GMTI[J].IEEE Trans.on Geoscience and Remote Sensing,2011,49(10):3611- 3621.
[5]Cerutti-Maori D,Sikaneta I,Gierull C H.Optimum SAR/GMTI processing and its application to the radar satellite RADARSAT-2 for traffic onitoring[J].IEEE Trans.on Geoscience and Remote Sensing,2012,50(10):3868- 3881.
[6]Cerutti-Maori D,Sikaneta I.A generalization of DPCA processing for multichannel SAR/GMTI radars[J].IEEE Trans.on Geoscience and Remote Sensing,2013,51(1):560- 572.
[7]Yan H,Wang R,Li F,et al.Ground moving target extraction in a multichannel wide-area surveillance SAR/GMTI system via the relaxed PCP[J].IEEE Trans.on Geoscience and Remote Sensing,2013,10(3):617- 621.
[8]Zuo L,Li M,Zhang X W.Doppler centroid estimation without ambiguity in DBS[J].Journal of Xidian University,2011,38(5):196- 203.(左磊,李明,张晓伟.DBS多普勒中心无模糊估计新方法[J].西安电子科技大学学报,2011,38(5):196- 203.)
[9]Long T,Lu Z,Ding Z G,et al.A DBSDoppler centroid estima-tion algorithm based on entropy minimization[J].IEEE Trans. on Geoscience and Remote Sensing,2011,49(10):3703- 3712.
[10]Cheng Y P,Sun C Y.Applications of superresolution signal estimation to Doppler beam sharpened imaging[J].Journal of Electronics,2000,22(3):392- 397.(程玉平,孙长印.超分辨方法在多普勒波束锐化中的应用[J].电子科学学刊,2000,22(3):392- 397.)
[11]Zhao H Z,Xie H Y,Zhou J X,et al.High squint DBSimaging based on constant acceleration movement platform[J].Acta Electronic Sinca,2010,38(6):1280- 1286.(赵宏钟,谢华英,周建雄,等.匀加速运动平台下的大斜视DBS成像算法[J].电子学报,2010,38(6):1280- 1286.)
[12]Liu F,Zhao F J,Deng Y K,et al.A new high resolution DBS imaging algorithm based least squares linear fitting[J].Journal of Electronic&Information Technology,2011,33(4):787-791.(刘凡,赵凤君,邓云凯,等.一种基于最小二乘直线拟合的高分辨率DBS成像算法[J].电子与信息学报,2011,33(4):787- 791.)
[13]Hu R X,Wang T,Bao Z,et al.A novel algorithm for stitching Doppler beam sharpening images on INSinformation[J],Journal of Electronic&Information Technology,2012,34(6):1337-1343.(胡瑞贤,王彤,保铮,等.一种基于惯导信息的多普勒波束锐化图像的拼接算法[J].电子与信息学报,2012,34(6):1337 -1343.)
[14]Chen H M,Li M,Lu Y L,et al.A DBS image stitching algorithm based on affine transformation[C]∥Proc.of the IET International Radar Conference,2013:1- 4.
[15]Li J,Stoica P.An adaptive filtering approach to spectral estimation and SAR imaging[J].IEEE Trans.on Signal Processing,1996,44(6):1469- 1484.
[16]Seungwoo K,Sepehrifar R M,Kishk A A.High accuracy peak location and amplitude spectral estimation via tuning APES method[J].Digital Signal Processing,2010,20:552- 560.
[17]Zhu W,Chen B X.Blind DOA estimation of distributed coherent arrays based on 2-D interferometric-like APES algorithm[J].Systems Engineering and Electronics,2013,35(2):237- 243.(朱伟,陈伯孝.基于二维干涉式APES算法的分布式相参阵盲DOA估计[J].系统工程与电子技术,2013,35(2):237- 243.)
[18]Li M,Wei H L,Sun J P,et al.Keeping sharpening ratio constant for DBS of airborne mechanic scanning radar[C]∥Proc. of the IET International Radar Conference,2009:1- 5.
Novel supper-resolution wide area imaging algorithm based on APES
CHEN Hong-meng,LI Ming,LU Yun-long,ZUO Lei,ZHANG Peng
(National Key Laboratory of Radar Signal Processing,Xidian University,Xi’an 710071,China)
Doppler beam sharpening(DBS)technology can be used to acquire a wide-area surveillance scene,yet the resolution is not high.A basic principle of DBS imaging is introduced,and a super-resolution model in the azimuth direction is constructed and a novel wide area super resolution imaging algorithm is proposed.The echo data can be expressed as the sum of a set of different scattering centers with different Doppler frequencies in frequency domain,and the amplitude and phase estimation(APES)method is applied to perform the Doppler analysis.Simulation results and measured data show that the proposed algorithm can obtain a clear super-resolution wide-area DBS image.
Doppler beam sharpening(DBS);super resolution;amplitude and phase estimation(APES)
TN 957
A
10.3969/j.issn.1001-506X.2015.01.02
陈洪猛(1986-),男,博士研究生,主要研究方向为雷达成像与微弱运动目标检测、现代雷达信号处理。
E-mail:chenhongmeng123@163.com
李 明(1965-),男,教授,博士,主要研究方向为宽带信号处理与微弱目标检测、雷达图像处理与分析、高速并行信号处理、高性能DSP应用系统设计、雷达抗干扰技术。
E-mail:liming@xidian.edu.cn
卢云龙(1986-),男,博士研究生,主要研究方向为雷达抗干扰及干扰识别。
E-mail:yllu@stu.xidian.edu.cn
左 磊(1985-),男,博士研究生,主要研究方向为微弱目标检测。
E-mail:lzuo@mail.xidian.edu.cn
张 鹏(1984-),男,讲师,博士,主要研究方向为SAR图像分割。
E-mail:zhangpeng4415@hotmail.com
1001-506X(2015)01-0006-06
网址:www.sys-ele.com
2014- 01- 09;
2014- 04- 21;网络优先出版日期:2014- 07- 14。
网络优先出版地址:http://w ww.cnki.net/kcms/detail/11.2422.TN.20140714.1359.005.html
国家自然科学基金(61271297,61272281,61301284);高等学校博士学科点专项科研基金(20110203110001)资助课题
