参数不确定与有界干扰自由飘浮柔性空间机械臂基于速度观测器的奇异摄动鲁棒控制及振动抑制
2015-06-12于潇雁
于潇雁, 陈 力
福州大学 机械工程及自动化学院,福州 350116)
参数不确定与有界干扰自由飘浮柔性空间机械臂基于速度观测器的奇异摄动鲁棒控制及振动抑制
于潇雁, 陈 力
福州大学 机械工程及自动化学院,福州 350116)
讨论载体位置、姿态均不受控情况下系统参数不确定与有界干扰自由漂浮柔性空间机械臂基于速度观测器的奇异摄动鲁棒控制及振动抑制问题。利用拉格朗日方程结合动量守恒原理获得自由飘浮柔性空间机械臂系统动力学方程;用奇异摄动法将柔性空间机械臂系统分解为关于关节轨迹跟踪的慢变子系统与描述柔性杆件振动的快变子系统。以此为基础,提出含慢、快变控制项的复合控制器。将动态滑模观测器与鲁棒控制结合,获得系统慢变控制力矩实现关节轨迹跟踪。对快变子系统基于线性观测器及线性系统最优控制理论获得系统快变控制力矩实现柔性杆振动抑制。并数值仿真证实方法的有效性。该控制方案仅需精确的载体姿态、关节角位置及柔性振动模态坐标反馈,而无需测量载体姿态角速度、关节角速度及角加速度、柔性振动模态坐标导数及漂浮基位置、移动速度、移动加速度。
飘浮基柔性空间机械臂;奇异摄动法;鲁棒控制;速度观测
未来空间作业中机器人将扮演重要角色,不仅能减少宇航员舱外活动危险且可节省载人航天费用,因此对空间机器人研究颇受关注[1-4]。考虑空间机械臂质量轻、臂长、重载等特点,为获得空间机械臂较好控制精度及性能,需考虑机械臂柔性。苏文敬等[5]利用假设模态法进行动力学建模并用PD控制器进行关节铰的轨迹跟踪控制。Senda等[6]研究关节轨迹跟踪控制器,并在实现轨迹跟踪后用优化控制消除残余振动。Yoshisada等[7]实现柔性机械臂快速抑制振动的自适应控制。Joono 等[8-10]利用奇异摄动法设计出既能实现关节轨迹跟踪又能对柔性振动进行抑制的控制器。
值得一提的是,以上控制方案均需实时测量柔性空间机械臂系统载体姿态角速度及机械臂关节铰的转动速度或加速度、柔性振动模态坐标及坐标导数,甚至包括载体位置、移动速度、加速度,不仅增加成本且测量时会含大量噪声信息,影响控制性能。由于在空间环境下系统控制燃料及其宝贵,从节省控制燃料、增加空间机器人系统的有效使用寿命、减少发射费用角度考虑,使用载体位置、姿态均不受控制的空间机器人系统非常必要。本文讨论载体位置、姿态均不受控情况下,系统参数不确定与具有有界干扰自由漂浮柔性空间机械臂基于速度观测器的奇异摄动鲁棒控制及振动抑制问题。利用拉格朗日方程结合动量守恒原理获得系统动力学方程。与关节铰运动相比,柔性杆振动为高频振动,故关节轨迹跟踪与振动抑制时间尺度可分开考虑。利用奇异摄动法,将柔性空间机械臂系统分解为关于关节轨迹的慢变子系统与描述柔性杆件振动的快变子系统。以此为基础,针对末端抓取载荷未知及仅有精确载体姿态、关节角位置反馈情况下,利用动态滑模观测器生成机械臂关节角速度估计向量,设计慢变子系统基于机械臂关节角位置、角速度估计向量的轨迹跟踪鲁棒控制方案。同时对快变子系统用基于线性观测器的线性全局最优控制对柔性杆件振动进行抑制。系统数值仿真结果表明,设计的控制器具有小抖振、小稳态误差及快速收敛等优点。
1 飘浮基柔性空间机械臂动力学模型
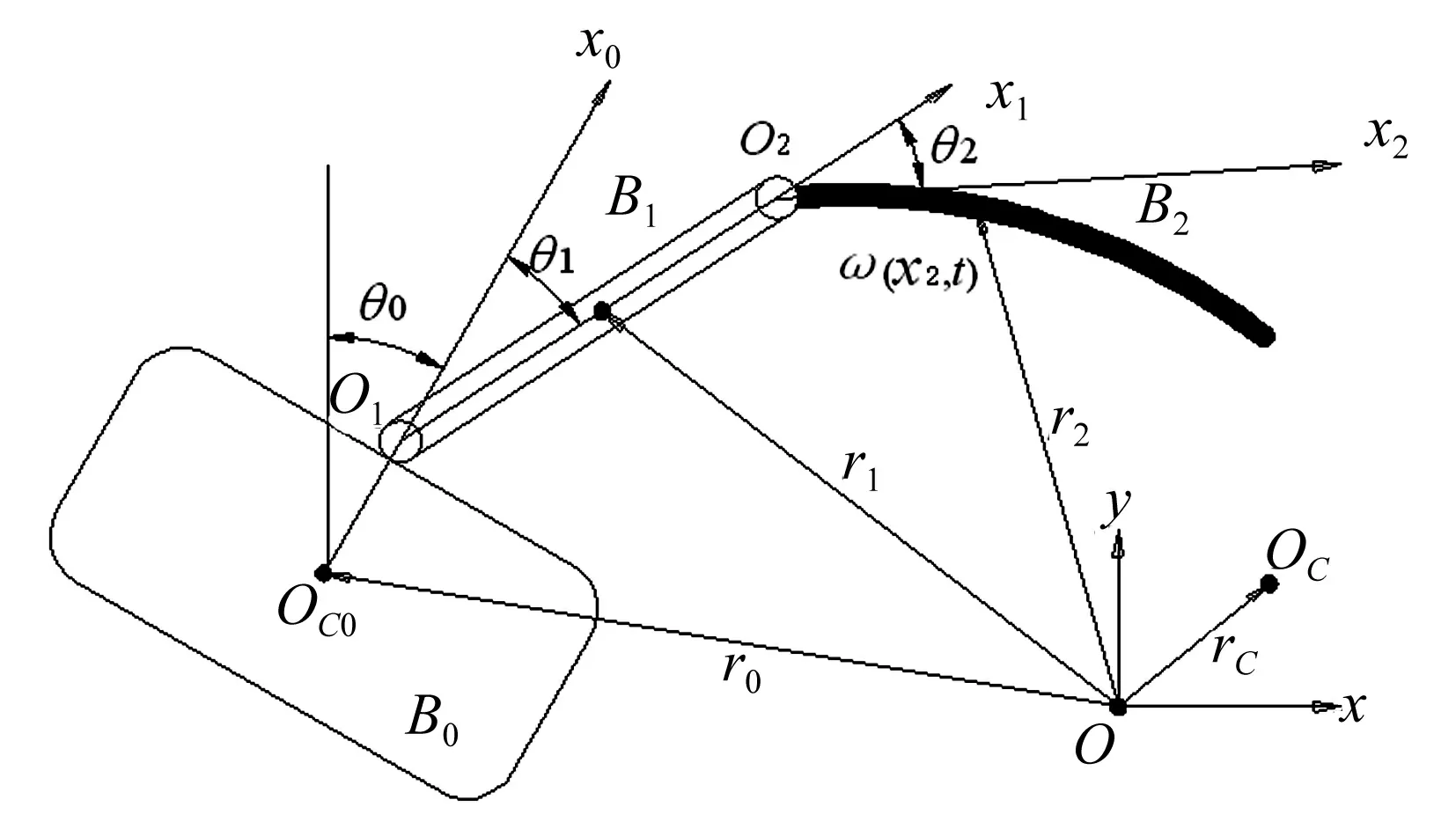
图1 飘浮基柔性空间机械臂Fig.1 A planar free-floating flexible space manipulator
考虑做平面运动的飘浮基柔性空间机械臂系统,见图1。该系统可视为由自由飘浮载体B0、刚性机械臂B1、柔性臂B2组成。建立各分体Bi(i=0,1,2)联体坐标系Oixiyi,其中O0与B0质心OC0重合,Oi(i=1,2)为联结Bi-1与Bi的转动铰中心,x1为刚性机械臂B1的对称轴,x2轴与柔性臂B2始终相切于O2。OC1为B1质心,OC1距O1为d1。设O1在x0轴上与O0距离为l0,Bi沿xi(i=1,2)轴长度为li,载体与刚性机械臂质量及绕质心转动惯量分别为mi、Ii(i=0,1),柔性机械臂为匀质杆,单位长度线密度为ρ,机械臂端部载荷质量及中心转动惯量为mE、IE,OC为系统总质心。
建立平动惯性坐标系(O-xy),设各分体沿(x,y)平面作平面运动,θ0、θ1、θ2分别为系统载体姿态及机械臂杆件关节铰相对转角,载体、刚性机械臂B1质心OCi(i=0,1)相对于惯性坐标系原点O矢径为ri,柔性臂任一点相对于惯性坐标系原点O的矢径为r2。当柔性臂满足小变形假设,忽略柔性臂B2的轴向变形及剪切变形影响,柔性臂可视为Euler-Bernoulli梁,其弹性变形基于假设模态法[11]描述为
式中:φi(x2)为柔性臂B2第i阶模态函数;δi(t)为φi(x2)时变振幅;m为截断项数,本文m=2。
忽略微弱重力梯度,由拉格朗日第二类方程及动量守恒原理可得(图1)载体位置、姿态均不受控漂浮基柔性空间机械臂的系统动力学方程为
(1)

2 动力学模型奇异摄动分解
各种物理系统或多或少存在一些小参数,数学上均能用某个小参数ε与某一比例系数乘积表示。此类小参数在整个系统参数中为次要成分,所起动态影响表现为“摄动”或“微扰”,但在建立模型时不可忽略。双时标分解即将原集中控制系统利用摄动[12-13]概念分解成不同时标的快、慢子变系统。摄动方法基本思想即通过忽略系统某些弱关联获得系统的近似低阶模型,并使其保留系统的主要动态特征。摄动方法可分为两类:即针对 “弱耦合”模型的正规摄动法及针对“强耦合”模型的奇异摄动法。“强耦合”模型一般形式为
(2)
初始条件为
x1(t0)=x10,x2(t0)=x20
式中:x1(t),x2(t)分别为慢、快变状态列阵;u(t)为系统输入列阵;ε为小时间常数。
模型分解原则为保留原系统主要动态特征即慢变过程,将小时间常数对动态系统影响近似为0予以忽略。设矩阵A22非奇异,当ε→0,式(2)退化为
(3)

(4)
由式(2)第二式可导出
(5)

(6)
初始条件为
(7)

(8)
式中:Drr∈R3×3,Drf∈R3×2,Dfr∈R2×3,Dff∈R2×2为矩阵D的对应子矩阵;hrr∈R3×3,hrf∈R3×2,hfr∈R2×3,hff∈R2×2为矩阵h的对应子矩阵。
由于系统惯性矩阵D对称、正定,其逆矩阵可定义为
(9)
式中:
式中:Nrr∈R3×3,Nrf∈R3×2,Nfr∈R2×3,Nff∈R2×2为矩阵N的对应子矩阵。
因而式(8)可表示为
(10)
(11)

(12)
(13)
整个柔性空间机械臂的控制目标为设计控制输入τ使系统机械臂关节铰能准确追踪期望轨迹并使部分解耦系统式(12)、(13)的振动得到控制。因此,该控制输入τ可由两部分组成
(14)

由式(14)看出,系统刚性运动与柔性杆振动仅通过控制输入τ耦合。一般而言,系统关节铰跟踪期望轨迹可通过适当选择τ获得控制效果,而仅通过期望轨迹选择控制输入不能保证耦合的振动模态动力学系统稳定。因此,将通过奇异摄动法[13]同时实现刚性轨迹追踪及振动主动抑制。
为得到漂浮基柔性空间机械臂慢变子系统,设ε= 0,由式(12)、(13)得
(15)
(16)
由式(16)得
(17)
由式(15)得
上式可写为
(18)

(19)
边界层系统可写为
(20)
(21)
ε→0,用式(16)可得快变子系统近似方程为
(22)
3 慢变子系统速度滑模观测与鲁棒控制
考虑外部扰动,慢变子系统模型可写为
(23)
相应状态空间方程为
(24)
模型偏差简化为
(25)

特性2. 对任意向量z∈R3存在关系为
式中:Chmax,Chmin为正常数。

由矩阵范数性质,得
借助特性1得
(26)

3.1 滑模观测器设计
滑模观测器设计为
(27)
由式(24)、(27)得观测器误差方程为
(28)

3.2 观测误差收敛性分析
(29)
V1对时间t求导得
(30)

证明:设计Lyapunov函数为
(31)
V2对时间t求导,代入式(28)并据特性2~4得
(32)
针对式(32),设计动态补偿增益ηi为
从而得
(33)
因初始观测点保持在滑模态,由等价控制原理[19]得
(34)
式中:(·)eq为等价控制量。
将式(33)、(34)代入式(32)得
(35)
(36)


3.3 鲁棒控制器设计
设计系统的Lyapunov函数为
(37)

式中:sl1为系统滑模。
V对时间t求导并代入式(24)得
(38)

(39)

(40)

借助特性4,不确定项ν满足


(42)
式中:
针对式(41)设计鲁棒控制项为
(43)
将式(43)代入式(40),有
(44)

4 快变子系统控制器设计
忽略不确定部分,则快变子系统为线性系统,且完全可控。采用最优控制方法抑制柔性臂的柔性振动,即系统状态ζ调节到零。最优控制性能泛函取为
式中:Q,R分别用于对状态向量ζ及控制向量τf引起的性能度量相对重要性进行加权。
快变子系统最优控制为
τf=-Koptζ=-R-1BfPζ
(45)
式中:P为Ricatti方程的解,即
PAf+AfTP-PBfR-1BfTP+Q=0

设式(1)的实际柔性振动模态坐标qf与期望输出向量qfd=[0 0]T之间的输出误差向量ef写为
ef=qf-qfd

(46)
(47)
5 数值仿真算例

设空间机械臂系统载体姿态及两关节铰的期望运动轨迹分别为
θ0d=0
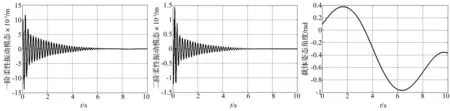
由仿真结果看出,初始误差较大时,基于动态滑模观测器的鲁棒跟踪控制能使机械臂关节快速、稳定追踪期望运动轨迹。仿真t=0.4 s后,追踪误差收敛到0,而由动态滑模观测器生成的伪速度信号也很快进入稳态。柔性杆一、二阶模态t=7 s后亦趋于0。



该控制方案仅需精确的载体姿态、关节角位置及柔性振动模态坐标反馈,而无需直接测量载体姿态角速度、关节角速度、关节角加速度及柔性振动模态坐标导数;且能有效克服空间机械臂存在的非线性、不确定性、强耦合、柔性等因素影响,使跟踪误差及柔性振动较快收敛到0。因利用系统动量守恒关系消去系统动力学方程中载体位置、线速度、线加速度项,具有无需反馈及测量载体位置、线速度、线加速度优点。
6 结 论
(1) 利用拉格朗日方程结合动量守恒原理建立飘浮基柔性空间机械臂系统动力学模型。利用奇异摄动法,将该系统分解为慢变子系统(刚性空间机械臂子系统)与柔性臂快变子系统。
(2) 对刚性空间机械臂子系统,在末端抓取载荷未知及仅有精确载体姿态、关节角位置反馈情况下,利用动态滑模观测器生成机械臂关节角速度估计向量,设计出基于机械臂关节角位置、角速度估计向量轨迹跟踪鲁棒控制方案。
(3) 对快变子系统用基于线性观测器的线性全局最优控制对柔性杆件振动进行抑制,可推广到具有任意柔性臂的飘浮基柔性空间机械臂系统。该控制方案仅需精确的载体姿态、关节角位置及柔性振动模态坐标反馈,而无需直接测量载体姿态角速度、关节角速度、关节角加速度、柔性振动模态坐标导数及漂浮基位置、移动速度、移动加速度。
[1] Garneau M. Space in the service of society: a canadian case study[C]//Proceedings of 2ndInternational Conference on Recent advances in Space Technologies, Istanbul, Turkey, 2005: 1-6.
[2] Nohmi M. Development of space tethered autonomous robotic satellite[C]//Proceedings of 3rdInternational Conference on Recent advances in Space Technologies, Istanbul, Turkey, 2007:462-467.
[3] Holcomb L B, Montemerlo, M D. NASA automation and robotics technology program[J]. IEEE Aerospace and Electronic Systems Magazine, 2009, 2(4):19-26.
[4] Yoshida K. Achievements in space robotics[J]. IEEE Robotics and Automation Magazine, 2009, 16(4): 20-28.
[5] 苏文敬,吴立成,孙富春,等。空间柔性双臂机器人系统建模、控制与仿真研究[J].系统仿真学报,2003,15(8):1098-1100. SU Wen-jing, WU Li-cheng, SUN fu-chun, et al. Dynamics modeling, control and simulation for flexible dual-arm space robot[J].Journal of System Simulation,2003, 15(8): 1098-1100.
[6] Senda K, Murotsu Y. Methodology for control of a space robot with flexible links[J]. IEEE Control Theory and Applications, 2000, 47(6): 562-568.
[7] 戈新生,崔玮,赵秋玲.刚柔性耦合机械臂轨迹跟踪与振动抑制[J].工程力学,2005,22(6):188-191. GE Xin-sheng, CUI wei, ZHAO Qiu-ling. Trajectory tracking control and vibration suppression of rigid flexible manipulators[J].Engineering Mechanics, 2005, 22(6): 188-191.
[8] Joono C H, Wan K Y C H, Youngil Y. Fast suppression of vibration for multi-link flexible robots using parameter adaptive control[C]// Proceedings of the 2001 IEEE/RSJ International Conference on Intelligent Robots and Systems. Maui, Hawail, USA, 2000: 913-918.
[9] Yoshisada M, Showzow T S,Kei S, et al. Trajectory control of flexible manipulators on a free-flying space robot[J]. IEEE Control Systems,1992, 12(3): 51-57.
[10] 洪昭斌,陈力.漂浮基柔性空间机械臂基于奇异摄动法的模糊控制和柔性振动主动控制[J].机械工程学报,2010, 46(7): 35-41. HONG Zhao-bin, CHEN Li. Active vibration control and fuzzy control of free-floating space flexible manipulator based on singular perturbation theory[J]. Journal of Mechanical Engineering,2010,46(7):35-41.
[11] Alessandro D L, Bruno S. Closed-form dynamic model of planar multilink lightweight robots[J]. IEEE Transactions on Systems, Man, and Cybernetics, 1991, 21(4): 826-839.
[12] 席裕庚.动态大系统方法导论[M].北京:国防工业出版社,1988.
[13] Kokotovic P, Khalil H K, O’Reilly J. Singular perturbation methods in control analysis and design[M].Academic Press, 1986.
[14] Siciliano B, Sciavicco L, Villani L, et al. Robotics, modelling, planning and control[M].New York:Opringer, 2009.
[15] Slotine J E, Li W P. On the adaptive control of robot manipulators [J]. Journal of the Robotics Research, 1987, 6(3):49-59.
[16] Ortega R, Spong Mark W. Adaptive motion control of rigid robots: a tutorial[C]//Proceedings of the 27th Conference on Decision and Control. Austin, Texas, 1988: 1575-1584.
[17] Arteaga Marco A, Kelly R. Robot control without velocity measurements: new theory and experimental results[J]. IEEE Transactions on Robotics and Automation, 2004, 20(2): 297-308.
[18] Nicosia S, Tomei P. Robot control by using only joint position measurements[J]. IEEE Transactions on Automatic Control, 1990, 35(9): 1058-1061.
[19] Ibrahim H, Mit Ozguner U, Utkin V. On sliding mode observers via equivalent control approach[J]. International Journal of Control, 1998, 71(6): 1051-1067.
[20] Wit De C C, Slotine J J E. Sliding observers for robot manipulators [J]. Automatica, 1991, 27 (5): 859- 864.
[21] Lewis F L , Abdallah C T , Dawson D M. Control of robot manipulators[M] . New York: MacMillan , 1993.
[22] Lee J Y, Ha T J, Yeon J S, et al. Robust nonlinear observer for flexible joint robot manipulators with only motor position measurement[C]//International Conference on Control, Automation and Systems, COEX, Seoul, Korea, 2007: 56-61.
Velocity observer based singular perturbation robust control and vibration suppression for a free-floating flexible space manipulator with unknown payload parameters and bounded disturbances
YU Xiao-yan, CHEN Li
School of Mechanical Engineering and Automation, Fuzhou University, Fuzhou 350116, China)
The robust control based on a velocity observer was introduced for a free-floating flexible space manipulator with unknown payload parameters and bounded disturbances. The dynamic model of the free-floating space manipulator with a flexible link was established by applying the momentum conservation principle and the Lagrange equations. The singular perturbation model of the flexible space manipulator system was obtained according to the two-time scale control theory, in which the system was decoupled into slow (rigid) and fast (flexible) subsystems. Then a composite controller consisting of a slow control component and a fast control component was proposed. A sliding observer based robust control algorithm was applied to control the slow subsystem with unknown payload parameters and bounded disturbances to track the desired trajectory. The fast controller was designed with the estimated velocity based on a linear observer to damp out the vibration of the flexible link using optimal linear quadratic regulator (LQR) method. Finally, a numerical simulation was carried out, which confirms the controller proposed was feasible and effective. The virtue of this control scheme is that the linear position, linear velocity, linear acceleration and angular velocity of the base, the angular velocities, angular accelerations of the joint as well as the derivative of the flexible vibration mode needn’t be measured directly.
free-floating flexible space manipulator; singular perturbation approach; robust control; velocity observe
国家自然科学基金资助项目(11372073);福建省自然科学基金资助项目(2010J01003)
2013-11-08 修改稿收到日期:2014-06-19
于潇雁 女,硕士,副教授,1974年11月生
V42;TP241
A
10.13465/j.cnki.jvs.2015.14.015