海洋钻井平台铁钻工主要结构形式浅析*
2015-06-09吴爱萍赵世刚刘翠洁
吴爱萍,赵世刚,刘翠洁,张 建
(兰州兰石能源装备工程研究院有限公司青岛分公司,山东青岛 266520)
海洋钻井平台铁钻工主要结构形式浅析*
吴爱萍,赵世刚,刘翠洁,张 建
(兰州兰石能源装备工程研究院有限公司青岛分公司,山东青岛 266520)
铁钻工是海洋钻井平台管子自动化处理装置的组成部分之一,能实现对钻具的上、卸扣作业,有效提高管子处理的自动化水平。介绍了铁钻工上、卸扣的工艺流程,并根据运移装置的不同,对国内外现有铁钻工的主要结构形式进行了归类,对各类铁钻工的特点进行了分析。
铁钻工;海洋钻井平台;管子处理;运移装置
0 引 言
在钻、修井过程中,铁钻工能够安全有效实现钻具的上、卸扣作业,是石油钻机钻井工艺过程必备的设备之一[1-2]。目前,海洋钻井平台一般均配备两套铁钻工,分别用于井口与鼠洞的管子作业,同时作为冗余设计,一套设备出现故障,另一套仍可替代其工作,降低故障风险。
1 铁钻工上卸扣工艺流程
铁钻工主要由底座、运移装置、钳体(旋扣钳、扣钳、背钳,如图1所示)、液压系统、控制系统等几部分组成。
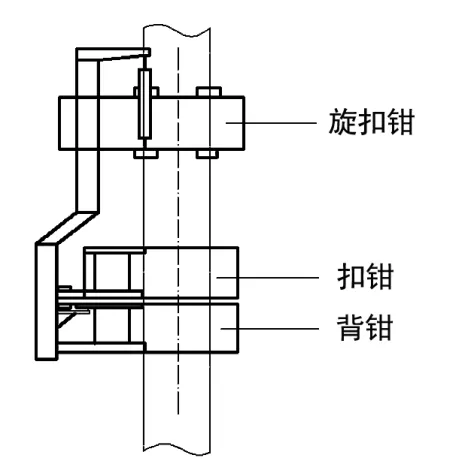
图1 铁钻工钳体示意图
铁钻工处理的管子对象主要有钻杆、钻铤、小管径套管等,以钻杆为例,其上扣作业流程具体如下:上下钻杆对接后,铁钻工运移装置运送钳体到达工作位置,闭合背钳固定下钻杆接箍(母接头),闭合旋扣钳夹紧上钻杆,启动液压马达进行旋扣,达到设定扭矩后停止并张开旋扣钳,同时闭合扣钳夹紧钻杆接箍(公接头),通过液缸推动,旋紧钻杆,上扣完成[3]。旋扣过程中钳头的相对位置发生变化[4],故设计调节机构,补偿螺纹行程。卸扣过程中,背钳固定钻杆接箍(母接头),由扣钳冲开旋合的螺纹,然后再由旋扣钳旋开螺纹完成卸扣[3]。
2 国内外铁钻工主要结构形式
目前,国外市场上海洋钻井平台用铁钻工产品技术成熟、类型广泛、系列全面,如美国NOV公司设计生产的 AR、ARN、ST、MPT系列铁钻工,挪威 Aker Kvaerner MH公司主推的动力钳系列铁钻工,美国TSC公司推出的IRN、IR系列铁钻工,加拿大Canrig公司的TM系列铁钻工产品等。
国内也有多所厂家开始研制海洋钻井平台用铁钻工产品,如宝石石油机械公司研发的TZG 9 3/4-140S、TZG 20-200G铁钻工、宏华石油设备公司生产的LM-120铁钻工、南阳二机石油装备公司生产的手臂式铁钻工、江苏如石机械公司研发的ZQF216-110铁钻工、辽宁陆海石油装备研究院设计的TZG-130 I铁钻工等,且多数厂家已完成上述样机的试制。
海洋钻井平台应用各种铁钻工钳体的结构原理基本类似,只是运移装置有所差异,根据运移装置的不同,现将海洋钻井平台用铁钻工分为手臂式铁钻工、轨道式铁钻工以及手臂轨道结合式铁钻工三种形式。分别对三种结构形式的铁钻工的结构以及特点进行分析。
2.1 手臂式铁钻工
如图2所示,手臂式铁钻工主要结构包括支撑总成(基座、升降装置)、伸缩手臂、钳体、控制系统、液压系统等[5]。
手臂式铁钻工基座配备旋转装置,通过单节、双节或者三节伸缩臂的伸缩运动,同时配合机械臂垂直运动,实现钳体在三维空间中的定位,到达井口或鼠洞上方。
此类铁钻工的优势在于结构紧凑,质量轻,操作简单,旋扣速度快,位移范围大,可到达多个目标操作位置,不工作时铁钻工占用空间小,多用于钻杆、小管径套管等钻具连接,能满足海上钻井的需求[2]。
其缺点在于控制较为复杂(尤其是多节伸缩臂铁钻工),处理范围受机械臂行程影响,而且此种结构要求钳体机构紧凑、质量轻,因此不利于进行大管径、大扭矩作业。
目前比较典型的产品主要有NOV生产的ST系列(ST-100、ST-120、ST-160)铁钻工以及Canrig公司的TM系列(Torq-Matic TM 80、TM 120)铁钻工,另外,国内宝石TZG 9 3/4-140S铁钻工、宏华LM-120铁钻工、南阳二机铁钻工、如石ZQF216-110铁钻工、辽宁陆海石油装备研究院TZG-130 I铁钻工均为手臂式形式。
2.2 轨道式铁钻工
如图3所示,轨道式铁钻工主要结构包括轨道、底座、功能架、钳体、控制系统、液压系统等[3]。
图2 NOV ST-160手臂式铁钻工

图3 TSC轨道式铁钻工
此类铁钻工主体不具备伸缩功能,整体坐于轨道之上,铁钻工可沿轨道水平行进,钳体置于功能架上,到达合适位置后,钳体在功能架上垂直运动调节高度,从而实现钳体的空间定位,进而进行钻柱操作。
轨道式铁钻工相对于伸缩臂式铁钻工操作更为方便,对管径的适应能力强,输出扭矩高,运行平稳。
由于需要在钻井平台上铺设轨道,因此轨道式铁钻工占用的空间较大,且重量较重[2]。另外其运动范围受到轨道的限制,运动轨迹不灵活。如果铁钻工需要操作多个工作目标位置,就需要铺设多条轨道,变轨操作工序复杂,同时占据钻台空间,容易造成工人行走的安全隐患。
目前比较典型的轨道式铁钻工产品主要有MH生产的 1898(手动)、1899(自动)、Torque Master、4160(轻型)动力钳以及TSC公司的IRN系列(IRN 1000、IRN 2000)、AR系列(AR3200)铁钻工,国内宝石研究的TZG 20-200G铁钻工也属于轨道式形式。
2.3 手臂轨道结合式铁钻工
手臂轨道结合式铁钻工主要由轨道、底座、伸缩手臂、功能架、钳体、控制系统、液压系统等组成[5]。
手臂轨道结合式铁钻工能够在铺设好的轨道上水平运行,同时配备伸缩手臂结构能够带动钳体进行伸缩,综合了轨道式以及手臂式铁钻工的结构特点。
根据手臂伸缩方向与轨道方向的相对位置,结合式铁钻工又分为手臂轨道平行式、手臂轨道垂直式、手臂轨道偏斜式三类。
2.3.1 手臂轨道平行式
如图4(a)所示,此类铁钻工手臂伸缩方向与铺设轨道方向一致。
铁钻工主体在轨道上移动,到达合适位置时,液缸驱动伸缩臂,带动钳体继续向前运移,同时,钳体可沿功能架上的导轨垂直移动,从而使钳体到达目标操作位置。NOV公司的ARN-200型铁钻工即为典型的手臂轨道平行式铁钻工。
当铁钻工轨道无法铺设到目标位置或与其他设备(如动力猫道)发生干涉时,即可使用此种类型的铁钻工,灵活操作钻柱。
2.3.2 手臂轨道垂直式
如图4(b)所示,此类铁钻工的手臂伸缩方向与轨道方向垂直。
铁钻工主体可以在铺设的轨道上水平运动,到达合适位置时,液缸驱动机械臂伸缩,同时调节钳体的垂直高度,实现钳体的三维定位。
此类铁钻工铺设的轨道与井口鼠洞平行,能够来回操作井口以及鼠洞的钻具,无需安装多套轨道和设备,节省钻台空间,提高安全性。
2.3.3 手臂轨道偏斜式
手臂轨道偏斜式铁钻工结构如图4(c)所示,此类铁钻工手臂伸缩方向与轨道能够偏斜一定角度。
铁钻工能够在轨道上水平运移,伸缩臂与底座非刚性连接,伸缩臂能够在底座上整体偏转,同时,手臂能够进行伸缩,从而实现钳体的定位。NOV公司的ARN-270型铁钻工是典型的手臂轨道偏斜式铁钻工结构。
这类铁钻工钳体定位更加灵活,可操作的目标工位更多,同样减少了多套轨道的铺设,节省空间,提高安全性能。
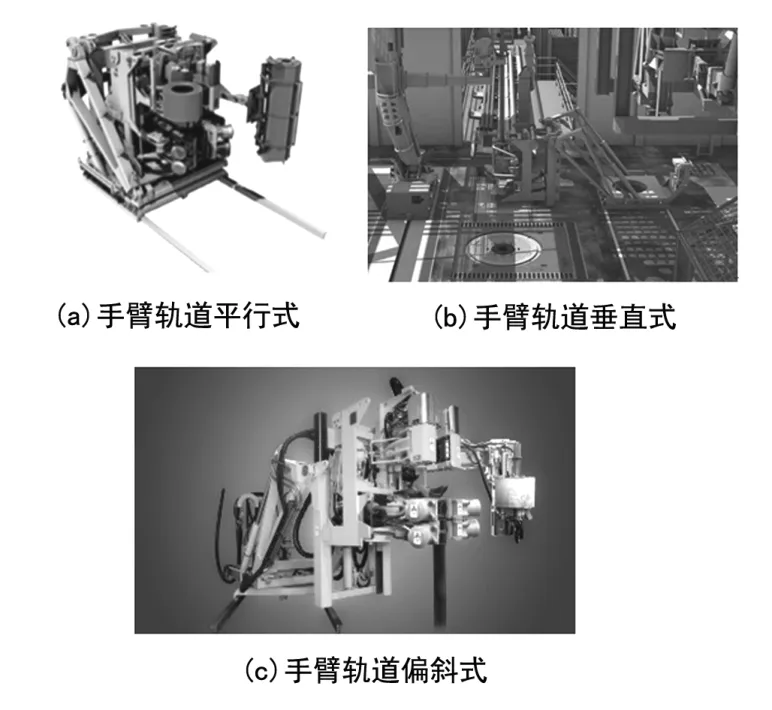
图4 手臂轨道结合式铁钻工
3 结 论
(1)每种形式的海洋钻井平台用铁钻工有其各自的特点,可根据用户实际需求配备。
(2)国外海洋钻井平台用铁钻工价格较高,国内铁钻工市场需求巨大。
(3)国内海洋钻井平台用铁钻工产品类型很少、不成系列、可靠性较差。国内厂家仅对手臂式铁钻工产品进行了研制,对于轨道式铁钻工以及结合式铁钻工的研发较少(仅宝石一家,未试制样机),还没有厂家对结合式铁钻工进行研究。
(4)国内可开展对海洋钻井平台用轨道式铁钻工以及结合式铁钻工的研究,填补技术空白。
[1] SY/T 5074.1-2009,石油钻井和修井用动力钳[S].
[2] API Spec.7K-0048,钻井和修井设备规范[S].
[3] 李继志.石油钻采机械概论[M].东营:中国石油大学出版社, 2012.
[4] 张洪生,于 昊,赵金峰.铁钻工的现状与展望[J].石油矿场机械,2008,37(1):12-16.
[5] 任福深,王 威,刘 晔,等.石油管柱上卸扣装置技术现状[J].石油机械,2012,40(5):15-19.
Analysis on Main Structure Forms of Iron Roughneck in the Offshore Drilling Platform
WU Ai-ping,ZHAO Shi-gang,LIU Cui-jie,ZHANG Jian
(Qingdao Branch of Lanzhou Lanshi Energy Equipment Engineering Research Institute Co.,Ltd,Qingdao Shandong 266520,China)
As component of the automatic pipe handling device,the iron roughneck can make up and break out the drill string connection,thus the iron roughneck can improve the automation level of pipe handling effectively.This article introduces the technological process of making up and breaking out the drill string connection,then classifies the main structure forms of existing iron roughneck according to the different moving devices,and analyzes characteristics of these kinds of iron roughnecks.
iron roughneck;offshore drilling platform;pipe handling;moving device
TE928
A
1007-4414(2015)05-0016-02
10.16576/j.cnki.1007-4414.2015.05.006
2015-08-13
吴爱萍(1989-),女,山东安丘人,助理工程师,主要从事石油机械的研发设计工作。
