折臂式铁钻工底座回转机构设计分析
2019-01-08常玉连刘佰龙
常玉连,刘佰龙
( 东北石油大学 机械科学与工程学院,黑龙江 大庆 163000)
0 引言
折臂式铁钻工是一种新型的钻机配套设备,也是目前国内外研究的一种自动化钻杆上扣和卸扣设备[1]。铁钻工技术的主要特点就是效率高、使用寿命长。折臂式铁钻工特别适合海洋平台钻井,其主要原因是能节省工作空间。现在的钻井技术自动化水平逐步提高,而该技术设备的应用有效地促进了钻井自动化技术的发展。折臂式铁钻工主要由五大部分组成,分别为旋扣钳、冲扣钳、伸缩臂、支撑与回转机构[2]。折臂式铁钻工结构方案如图1所示。
1 折臂式铁钻工底座与回转机构设计
折臂式铁钻工底座主要功能是通过与钻台相连支撑铁钻工绝大部分质量。回转机构的功能是实现铁钻工整体回转运动,进而配合折臂控制铁钻工的钳体在水平方向达到所要到达的位置进行石油管柱的上卸扣。回转机构的工作原理是电动机通过减速器带动驱动轮,驱动轮再通

1—底座;2—升降液压缸;3—滑移小车;4—立柱;5—伸展油缸;6—伸缩臂;7—旋扣钳;8—冲扣钳;9—驱动液压电动机图1 折臂式铁钻工整体示意图
过与行星轮进行啮合实现底座的回转运动[3]。回转机构安装在底座套筒中,在安装过程中一定要保证底座与底座套筒的紧密配合,保证底座与地面的垂直,确保钳体与管柱的垂直,如图2所示。在底座设计过程中,需要考虑以下几点因素:
1) 底座需要具有足够的强度和刚度,确保可以支撑整个折臂式铁钻工的质量以及在工作过程中所产生的载荷。
2) 可以检测折臂式铁钻工的回转角度,以便精确控制铁钻工上卸扣的方向,所以在设计过程中需要考虑加入电子检测设备,以检测底座回转的角度。
3) 保证齿轮的设计强度,由于铁钻工的回转次数较少,使用频率不是很高,可以将减速器的输出轴与驱动轮设计成为一体,保证输出转矩准确地传递,减少因减速器输出轴与驱动轮之间的损耗[4]。

1—底座上盖;2—回转支撑;3—行星轮;4—底座;5—底座套筒;6—行星轮轴;7—双列滚子轴承;8—电动机;9—减速器图2 底座装配示意图
1.1 折臂式铁钻工底座结构设计
铁钻工底座主要用来支撑铁钻工绝大部分质量。底座插入到底座套筒中,将整个折臂式铁钻工安装在钻台上,由图1可知底座主要容易产生弯曲,所以将底座设计成圆柱形状并对底座圆柱弯曲强度进行计算。通过计算得到满足条件的圆柱形底座。
由于底座是圆柱形的,并且质量很轻,不能支撑铁钻工保持直立。所以要将它安装在钻井平台上。铁钻工在钻台的安装主要是根据钻台的布置要求,将铁钻工安装在钻台上指定的位置。方法是将方形底座套筒固定在钻台上,开口向上;与钻台承载的两个工字钢进行焊接。其结构如图3所示。
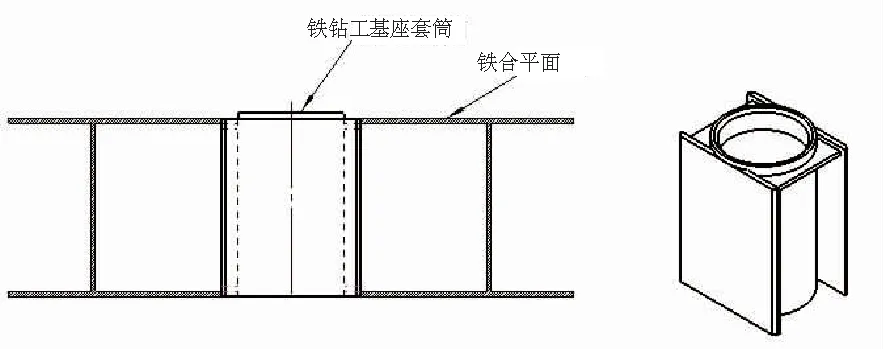
图3 底座套筒示意图
1.2 折臂式铁钻工回转机构设计
回转机构的功能是实现铁钻工整体回转运动。回转机构的工作原理是电动机通过减速器带动驱动轮,驱动轮再通过与行星轮进行啮合实现底座的回转运动。它的设计需要是在最小空间实现最大的传动效率,根据对比选择,选定行星轮系实现底座回转机构的运动。行星齿轮系可以采用几个均匀分布的行星轮同时传递运动和动力。这些行星轮因公转而产生的离心惯性力和齿廓间反作用力的径向分力可互相平衡,故主轴受力小,传递功率大[5]。另外由于它采用内啮合齿轮,充分利用了传动的空间,且输入输出轴在一条直线上,所以整个轮系的空间尺寸要比相同条件下的普通定轴齿轮系小得多。根据设计要求,选定2个行星轮来传递由驱动轮输出的转矩,通过固定内齿圈,将驱动轮的反转矩传递到钻台上,实现回转轴承外圈的回转[6]。其结构如图4所示。

1—回转轴承;2—驱动轮;3—行星轮图4 底座行星轮机构示意图
2 回转支撑安装方式和回转轴承的确定
根据铁钻工的工作需要,选定滚动轴承式回转支撑作为实现钳体回转的支撑结构。滚动轴承式回转支撑装置尺寸紧凑、性能完善,可以同时承受铁钻工钳体所带来的水平力、因铁钻工重力而产生的垂直力以及在铁钻工伸出状态而产生的倾覆力矩。因此选定单排四点接触球式回转支撑,它是由2个座圈组成,具有结构紧凑、质量轻、高度尺寸小等特点。由于回转支撑有两种安装形式,一种为悬挂式安装(图5),一种为座式安装(图6),通过对比分析可知回转支撑座式用于下面固定上面支撑,回转支撑悬挂式为上面固定下面连接所要支撑的部件。根据铁钻工的工作需求选择座式安装,安装时铁钻工的回转部分与轴承的内圈相连,固定部分与外圈相连。
在计算选型回转支撑的过程中,需要计算出折臂式铁钻工在工作过程中的静载荷和动载荷,并需要将计算得出的回转支承当量中心轴向载荷Fa与回转支承当量倾覆力矩M转化为量载荷F'a和M'。

图5 回转支撑座式安装

图6 回转支撑悬挂式安装
转化公式为:
M ′=M×fd
其中:fd为安全系数,取1.55。
通过计算得到结果,对照承载能力曲线可确定所选用相应的回转轴承。
3 回转机构传动轮系设计
底座通过行星齿轮机构来实现折臂式铁钻工的回转,行星齿轮由主动齿轮1、从动齿轮2、回转大齿轮3、行星架H(底座上盖)等组成,行星机构如图7所示[7]。

1—驱动轮;2—行星轮;3—内齿轮;H—底座上盖图7 行星齿轮简图
a) 传动轮系自由度的计算
根据机构自由度计算公式
F=3×N-(2×PS+Ph-P)-Pl
可得该轮系的自由度为1。
b) 齿轮使用寿命
根据具体的工作情况可知星轮的循环次数N2。则可以计算出驱动轮的循环次数为N1=N2×i12。则内齿轮相对于行星轮的循环次数为:
c) 以TZG/Y-165折臂式铁钻工为例设计轮系的各项参数
1) 该铁钻工底座回转机构选定的驱动齿轮齿数z1=18,行星轮齿数z2=31,内齿轮齿数z3=80,则传动比i12=1.72,i23=2.58。
2) 设定直齿轮模数m=8,则d1=144mm,d2=248mm,d3=640mm。
3) 已知驱动铁钻工回转需要TH=11 894Nm的转矩,根据传动比可以计算出T1=2 787Nm,T2=4 703Nm。
4) 根据折臂式铁钻工的设计要求,规定铁钻工的回转速度为nH=1r/min,根据传动比可以计算出n1=5.4r/min,n2=3.1r/min。
4 底座回转机构驱动电动机选择
底座回转机构主要依靠行星轮系来驱动,行星轮需要的转速较低,所以不能由电动机直接进行传动。为此在电动机和轮系的主动轮之间增加减速器来降低转速,以达到主动轮对转速的要求[8]。由于驱动齿轮的转矩即为减速器输出轴的转矩,根据减速器的额定转矩与输出转矩的关系,再根据铁钻工底座的空间要求,选择相应的减速器型号[9],它的减速比为i减。根据选定的减速器,推算出电动机所需要的转矩为:
根据上式计算出电动机所需要的输出转矩,选定相应的电动机型号。
5 结语
文中阐述了折臂式铁钻工底座回转机构工作原理为:电动机通过驱动轮带动行星轮将扭转力传递到回转轴承上进而实现了铁钻工整体的旋转运动,完成钻井上卸钻柱丝扣的工艺要求,并得出了以下结论:
1) 文中所用摇臂式铁钻工回转机构的设计方法,包括回转机构的静载荷和动载荷的分析及结构的强度校核方法。
2) 使用行星轮作为铁钻工回转机构的传动轮系,具有结构简单,保证旋转过程的稳定性,是铁钻工回转机构设计时可优先选择的方案。
3) 根据铁钻工对其回转机构旋转功率的需求,选择液压泵驱动系统,设计相应的减速器并选择配套电动机,提出了液压系统的设计基本方法。
4) 铁钻工是目前国际先进的钻柱上卸扣设备,实现铁钻工国产化是对推动国家石油装备升级换代重要举措。本文提出的铁钻工回转机构设计方法,具有参考价值,对国内的铁钻工设计有一定的指导和参考价值。
